ops_matrices.h File Reference
This file implements miscelaneous matrix and matrix/vector operations, and internal functions in mrpt::math::detail. More...
Detailed Description
This file implements miscelaneous matrix and matrix/vector operations, and internal functions in mrpt::math::detail.
Definition in file ops_matrices.h.
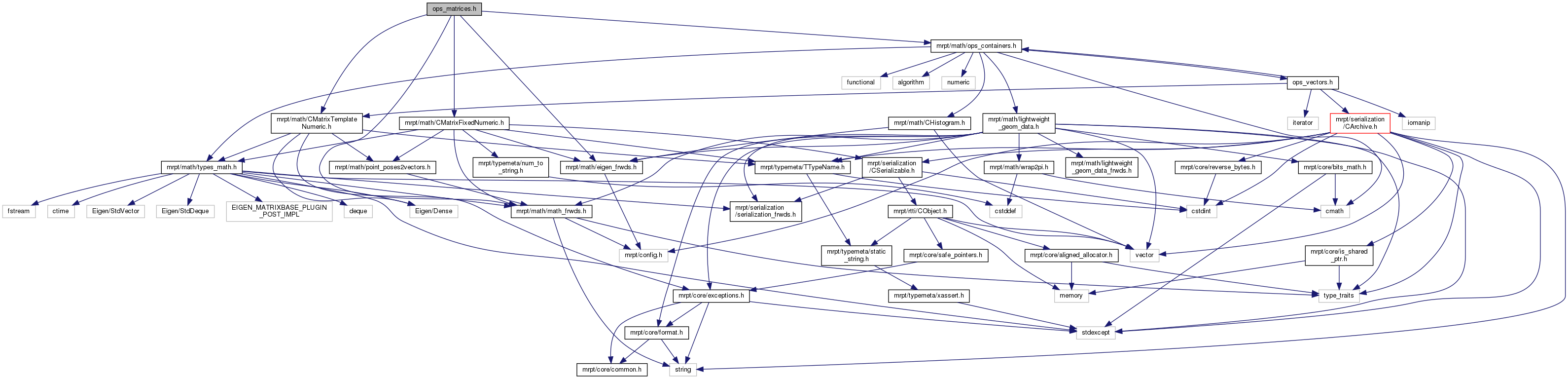
#include <mrpt/math/math_frwds.h>#include <mrpt/math/eigen_frwds.h>#include <mrpt/math/CMatrixTemplateNumeric.h>#include <mrpt/math/CMatrixFixedNumeric.h>#include <mrpt/math/ops_containers.h>
Include dependency graph for ops_matrices.h:
This graph shows which files directly or indirectly include this file:

Go to the source code of this file.
Namespaces | |
| mrpt | |
| This is the global namespace for all Mobile Robot Programming Toolkit (MRPT) libraries. | |
| mrpt::math | |
| This base provides a set of functions for maths stuff. | |
| mrpt::math::detail | |
Macros | |
| #define | SAVE_MATRIX(M) M.saveToTextFile(#M ".txt"); |
| A useful macro for saving matrixes to a file while debugging. More... | |
Functions | |
| template<class Derived > | |
| const Eigen::MatrixBase< Derived >::AdjointReturnType | mrpt::math::operator~ (const Eigen::MatrixBase< Derived > &m) |
| Transpose operator for matrices. More... | |
| template<class Derived > | |
| Eigen::MatrixBase< Derived >::PlainObject | mrpt::math::operator! (const Eigen::MatrixBase< Derived > &m) |
| Unary inversion operator. More... | |
| template<typename MAT_H , typename MAT_C , typename MAT_R > | |
| void | mrpt::math::multiply_HCHt (const MAT_H &H, const MAT_C &C, MAT_R &R, bool accumResultInOutput) |
| R = H * C * H^t (with C symmetric) More... | |
| template<typename VECTOR_H , typename MAT_C > | |
| MAT_C::Scalar | mrpt::math::multiply_HCHt_scalar (const VECTOR_H &H, const MAT_C &C) |
| r (a scalar) = H * C * H^t (with a vector H and a symmetric matrix C) More... | |
| template<typename MAT_H , typename MAT_C , typename MAT_R > | |
| void | mrpt::math::multiply_HtCH (const MAT_H &H, const MAT_C &C, MAT_R &R, bool accumResultInOutput) |
| R = H^t * C * H (with C symmetric) More... | |
| template<class MAT_IN , class VECTOR , class MAT_OUT > | |
| void | mrpt::math::meanAndCovMat (const MAT_IN &v, VECTOR &out_mean, MAT_OUT &out_cov) |
| Computes the mean vector and covariance from a list of samples in an NxM matrix, where each row is a sample, so the covariance is MxM. More... | |
| template<class MATRIX > | |
| Eigen::Matrix< typename MATRIX::Scalar, MATRIX::ColsAtCompileTime, MATRIX::ColsAtCompileTime > | mrpt::math::cov (const MATRIX &v) |
| Computes the covariance matrix from a list of samples in an NxM matrix, where each row is a sample, so the covariance is MxM. More... | |
| template<class MAT_A , class SKEW_3VECTOR , class MAT_OUT > | |
| void | mrpt::math::multiply_A_skew3 (const MAT_A &A, const SKEW_3VECTOR &v, MAT_OUT &out) |
| Only for vectors/arrays "v" of length3, compute out = A * Skew(v), where Skew(v) is the skew symmetric matric generated from v (see mrpt::math::skew_symmetric3) More... | |
| template<class SKEW_3VECTOR , class MAT_A , class MAT_OUT > | |
| void | mrpt::math::multiply_skew3_A (const SKEW_3VECTOR &v, const MAT_A &A, MAT_OUT &out) |
| Only for vectors/arrays "v" of length3, compute out = Skew(v) * A, where Skew(v) is the skew symmetric matric generated from v (see mrpt::math::skew_symmetric3) More... | |
| template<class MATORG , class MATDEST > | |
| void | mrpt::math::detail::extractMatrix (const MATORG &M, const size_t first_row, const size_t first_col, MATDEST &outMat) |
| Extract a submatrix - The output matrix must be set to the required size before call. More... | |
Macro Definition Documentation
◆ SAVE_MATRIX
| #define SAVE_MATRIX | ( | M | ) | M.saveToTextFile(#M ".txt"); |
A useful macro for saving matrixes to a file while debugging.
Definition at line 159 of file ops_matrices.h.