Detailed Description
Declares a virtual base class for all metric maps storage classes.
In this class virtual methods are provided to allow the insertion of any type of "CObservation" objects into the metric map, thus updating the map (doesn't matter if it is a 2D/3D grid, a point map, etc.).
Observations don't include any information about the robot pose, just the raw observation and information about the sensor pose relative to the robot mobile base coordinates origin.
Note that all metric maps implement this mrpt::utils::CObservable interface, emitting the following events:
- mrpt::obs::mrptEventMetricMapClear: Upon call of the clear() method.
mrpt::obs::mrptEventMetricMapInsert: Upon insertion of an observation that effectively modifies the map (e.g. inserting an image into a grid map will NOT raise an event, inserting a laser scan will).
To check what observations are supported by each metric map, see: Maps and observations compatibility matrix
- Note
- All derived class must implement a static class factory
<metric_map_class>::MapDefinition()that builds a default TMetricMapInitializer [New in MRPT 1.3.0]
- See also
- CObservation, CSensoryFrame, CMultiMetricMap
Definition at line 55 of file CMetricMap.h.
#include <mrpt/maps/CMetricMap.h>
Public Member Functions | |
| void | clear () |
| Erase all the contents of the map. More... | |
| virtual bool | isEmpty () const =0 |
| Returns true if the map is empty/no observation has been inserted. More... | |
| void | loadFromProbabilisticPosesAndObservations (const mrpt::maps::CSimpleMap &Map) |
| Load the map contents from a CSimpleMap object, erasing all previous content of the map. More... | |
| void | loadFromSimpleMap (const mrpt::maps::CSimpleMap &Map) |
| !This is an overloaded member function, provided for convenience. It differs from the above function only in what argument(s) it accepts. More... | |
| bool | insertObservation (const mrpt::obs::CObservation *obs, const mrpt::poses::CPose3D *robotPose=NULL) |
| Insert the observation information into this map. More... | |
| bool | insertObservationPtr (const mrpt::obs::CObservation::Ptr &obs, const mrpt::poses::CPose3D *robotPose=NULL) |
| A wrapper for smart pointers, just calls the non-smart pointer version. More... | |
| double | computeObservationLikelihood (const mrpt::obs::CObservation *obs, const mrpt::poses::CPose3D &takenFrom) |
| Computes the log-likelihood of a given observation given an arbitrary robot 3D pose. More... | |
| double | computeObservationLikelihood (const mrpt::obs::CObservation *obs, const mrpt::poses::CPose2D &takenFrom) |
| This is an overloaded member function, provided for convenience. It differs from the above function only in what argument(s) it accepts. More... | |
| virtual bool | canComputeObservationLikelihood (const mrpt::obs::CObservation *obs) const |
| Returns true if this map is able to compute a sensible likelihood function for this observation (i.e. More... | |
| bool | canComputeObservationLikelihood (const mrpt::obs::CObservation::Ptr &obs) const |
| This is an overloaded member function, provided for convenience. It differs from the above function only in what argument(s) it accepts. More... | |
| double | computeObservationsLikelihood (const mrpt::obs::CSensoryFrame &sf, const mrpt::poses::CPose2D &takenFrom) |
| Returns the sum of the log-likelihoods of each individual observation within a mrpt::obs::CSensoryFrame. More... | |
| bool | canComputeObservationsLikelihood (const mrpt::obs::CSensoryFrame &sf) const |
| Returns true if this map is able to compute a sensible likelihood function for this observation (i.e. More... | |
| CMetricMap () | |
| Constructor. More... | |
| virtual void | determineMatching2D (const mrpt::maps::CMetricMap *otherMap, const mrpt::poses::CPose2D &otherMapPose, mrpt::utils::TMatchingPairList &correspondences, const TMatchingParams ¶ms, TMatchingExtraResults &extraResults) const |
| Computes the matching between this and another 2D point map, which includes finding: More... | |
| virtual void | determineMatching3D (const mrpt::maps::CMetricMap *otherMap, const mrpt::poses::CPose3D &otherMapPose, mrpt::utils::TMatchingPairList &correspondences, const TMatchingParams ¶ms, TMatchingExtraResults &extraResults) const |
| Computes the matchings between this and another 3D points map - method used in 3D-ICP. More... | |
| virtual float | compute3DMatchingRatio (const mrpt::maps::CMetricMap *otherMap, const mrpt::poses::CPose3D &otherMapPose, const TMatchingRatioParams ¶ms) const |
| Computes the ratio in [0,1] of correspondences between "this" and the "otherMap" map, whose 6D pose relative to "this" is "otherMapPose" In the case of a multi-metric map, this returns the average between the maps. More... | |
| virtual void | saveMetricMapRepresentationToFile (const std::string &filNamePrefix) const =0 |
| This virtual method saves the map to a file "filNamePrefix"+< some_file_extension >, as an image or in any other applicable way (Notice that other methods to save the map may be implemented in classes implementing this virtual interface). More... | |
| virtual void | getAs3DObject (mrpt::opengl::CSetOfObjects::Ptr &outObj) const =0 |
| Returns a 3D object representing the map. More... | |
| virtual void | auxParticleFilterCleanUp () |
| This method is called at the end of each "prediction-update-map
insertion" cycle within "mrpt::slam::CMetricMapBuilderRBPF::processActionObservation". More... | |
| virtual float | squareDistanceToClosestCorrespondence (float x0, float y0) const |
| Returns the square distance from the 2D point (x0,y0) to the closest correspondence in the map. More... | |
| virtual const mrpt::maps::CSimplePointsMap * | getAsSimplePointsMap () const |
| If the map is a simple points map or it's a multi-metric map that contains EXACTLY one simple points map, return it. More... | |
| virtual mrpt::maps::CSimplePointsMap * | getAsSimplePointsMap () |
| virtual mxArray * | writeToMatlab () const |
Introduces a pure virtual method responsible for writing to a mxArray Matlab object, typically a MATLAB struct whose contents are documented in each derived class. More... | |
| virtual CObject * | clone () const =0 |
| Returns a deep copy (clone) of the object, indepently of its class. More... | |
RTTI classes and functions | |
| mrpt::utils::CObject::Ptr | duplicateGetSmartPtr () const |
| Returns a copy of the object, indepently of its class, as a smart pointer (the newly created object will exist as long as any copy of this smart pointer). More... | |
Public Attributes | |
| TMapGenericParams | genericMapParams |
| Common params to all maps. More... | |
Protected Member Functions | |
| virtual void | writeToStream (mrpt::utils::CStream &out, int *getVersion) const =0 |
| Introduces a pure virtual method responsible for writing to a CStream. More... | |
| virtual void | readFromStream (mrpt::utils::CStream &in, int version)=0 |
| Introduces a pure virtual method responsible for loading from a CStream This can not be used directly be users, instead use "stream >> object;" for reading it from a stream or "stream >> object_ptr;" if the class is unknown apriori. More... | |
| void | publishEvent (const mrptEvent &e) const |
| Called when you want this object to emit an event to all the observers currently subscribed to this object. More... | |
| bool | hasSubscribers () const |
| Can be called by a derived class before preparing an event for publishing with publishEvent to determine if there is no one subscribed, so it can save the wasted time preparing an event that will be not read. More... | |
Private Member Functions | |
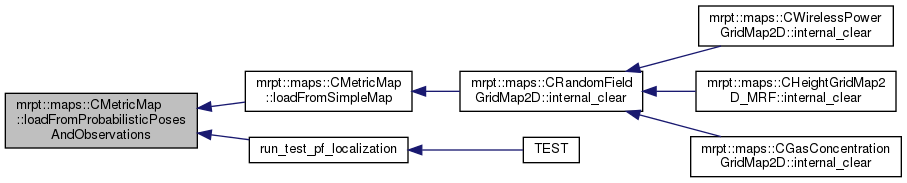
| virtual void | internal_clear ()=0 |
| Internal method called by clear() More... | |
| virtual bool | internal_insertObservation (const mrpt::obs::CObservation *obs, const mrpt::poses::CPose3D *robotPose=NULL)=0 |
| Internal method called by insertObservation() More... | |
| virtual double | internal_computeObservationLikelihood (const mrpt::obs::CObservation *obs, const mrpt::poses::CPose3D &takenFrom)=0 |
| Internal method called by computeObservationLikelihood() More... | |
| virtual bool | internal_canComputeObservationLikelihood (const mrpt::obs::CObservation *obs) const |
| Internal method called by canComputeObservationLikelihood() More... | |
| virtual void | OnPostSuccesfulInsertObs (const mrpt::obs::CObservation *) |
| Hook for each time a "internal_insertObservation" returns "true" This is called automatically from insertObservation() when internal_insertObservation returns true. More... | |
| void | internal_observer_begin (CObserver *) |
| void | internal_observer_end (CObserver *) |
Private Attributes | |
| std::set< CObserver * > | m_subscribers |
RTTI stuff <br> | |
| using | Ptr = std::shared_ptr< CMetricMap > |
| using | ConstPtr = std::shared_ptr< const CMetricMap > |
| static const mrpt::utils::TRuntimeClassId | runtimeClassId |
| class | mrpt::utils::CStream |
| static const mrpt::utils::TRuntimeClassId * | _GetBaseClass () |
| virtual const mrpt::utils::TRuntimeClassId * | GetRuntimeClass () const override |
| Returns information about the class of an object in runtime. More... | |
| static const mrpt::utils::TRuntimeClassId & | GetRuntimeClassIdStatic () |
Member Typedef Documentation
◆ ConstPtr
| using mrpt::maps::CMetricMap::ConstPtr = std::shared_ptr<const CMetricMap > |
Definition at line 58 of file CMetricMap.h.
◆ Ptr
| using mrpt::maps::CMetricMap::Ptr = std::shared_ptr< CMetricMap > |
Definition at line 58 of file CMetricMap.h.
Constructor & Destructor Documentation
◆ CMetricMap()
| CMetricMap::CMetricMap | ( | ) |
Constructor.
Definition at line 29 of file CMetricMap.cpp.
Member Function Documentation
◆ _GetBaseClass()
|
staticprotected |
◆ auxParticleFilterCleanUp()
|
inlinevirtual |
This method is called at the end of each "prediction-update-map insertion" cycle within "mrpt::slam::CMetricMapBuilderRBPF::processActionObservation".
This method should normally do nothing, but in some cases can be used to free auxiliary cached variables.
Reimplemented in mrpt::maps::CLandmarksMap, and mrpt::maps::CMultiMetricMap.
Definition at line 289 of file CMetricMap.h.
◆ canComputeObservationLikelihood() [1/2]
|
virtual |
Returns true if this map is able to compute a sensible likelihood function for this observation (i.e.
an occupancy grid map cannot with an image). See: Maps and observations compatibility matrix
- Parameters
-
obs The observation.
- See also
- computeObservationLikelihood, genericMapParams.enableObservationLikelihood
Definition at line 180 of file CMetricMap.cpp.
◆ canComputeObservationLikelihood() [2/2]
| bool CMetricMap::canComputeObservationLikelihood | ( | const mrpt::obs::CObservation::Ptr & | obs | ) | const |
This is an overloaded member function, provided for convenience. It differs from the above function only in what argument(s) it accepts.
Definition at line 121 of file CMetricMap.cpp.
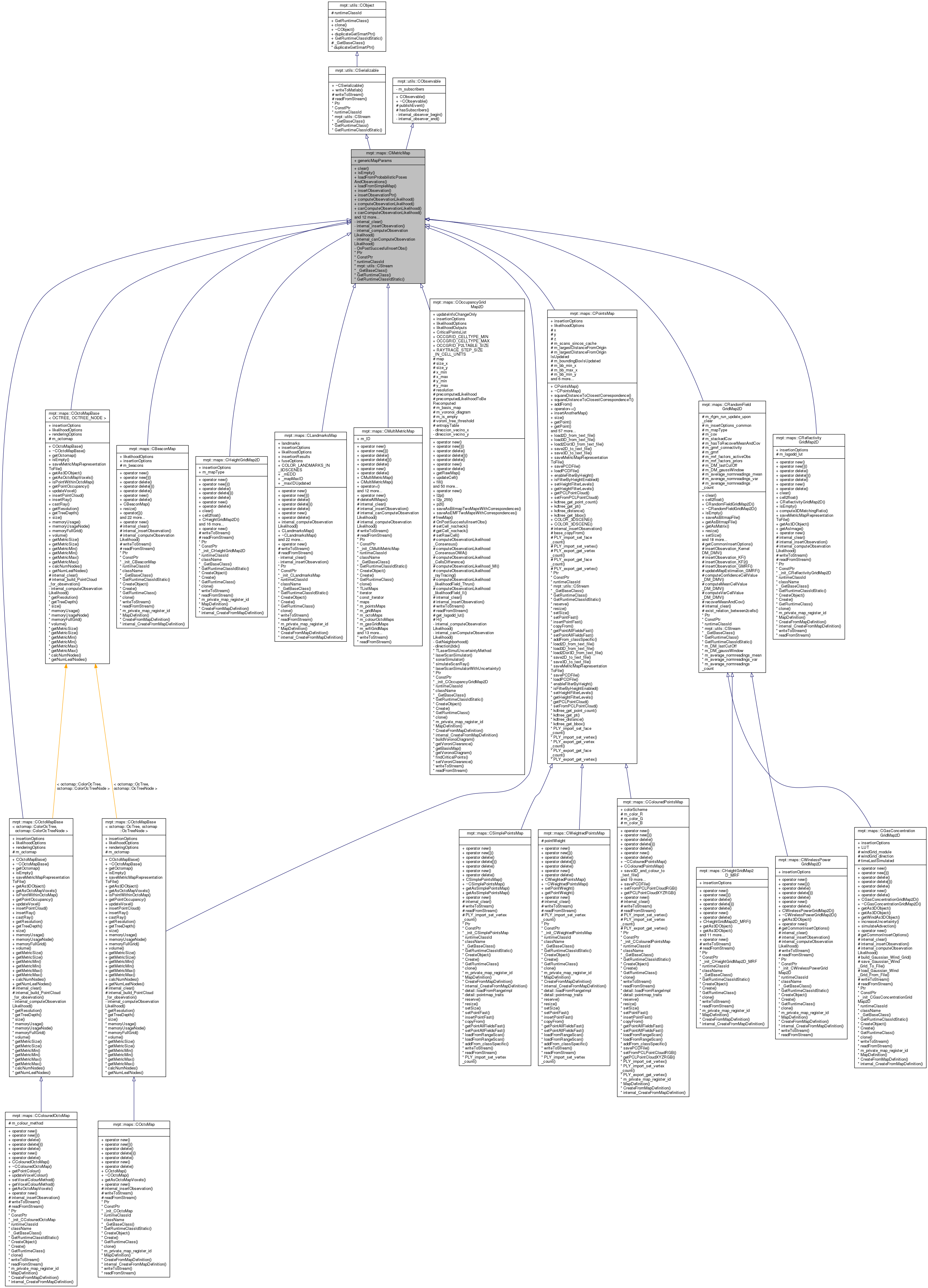
◆ canComputeObservationsLikelihood()
| bool CMetricMap::canComputeObservationsLikelihood | ( | const mrpt::obs::CSensoryFrame & | sf | ) | const |
Returns true if this map is able to compute a sensible likelihood function for this observation (i.e.
an occupancy grid map cannot with an image). See: Maps and observations compatibility matrix
- Parameters
-
sf The observations.
- See also
- canComputeObservationLikelihood
Definition at line 86 of file CMetricMap.cpp.
References mrpt::obs::CSensoryFrame::begin(), and mrpt::obs::CSensoryFrame::end().
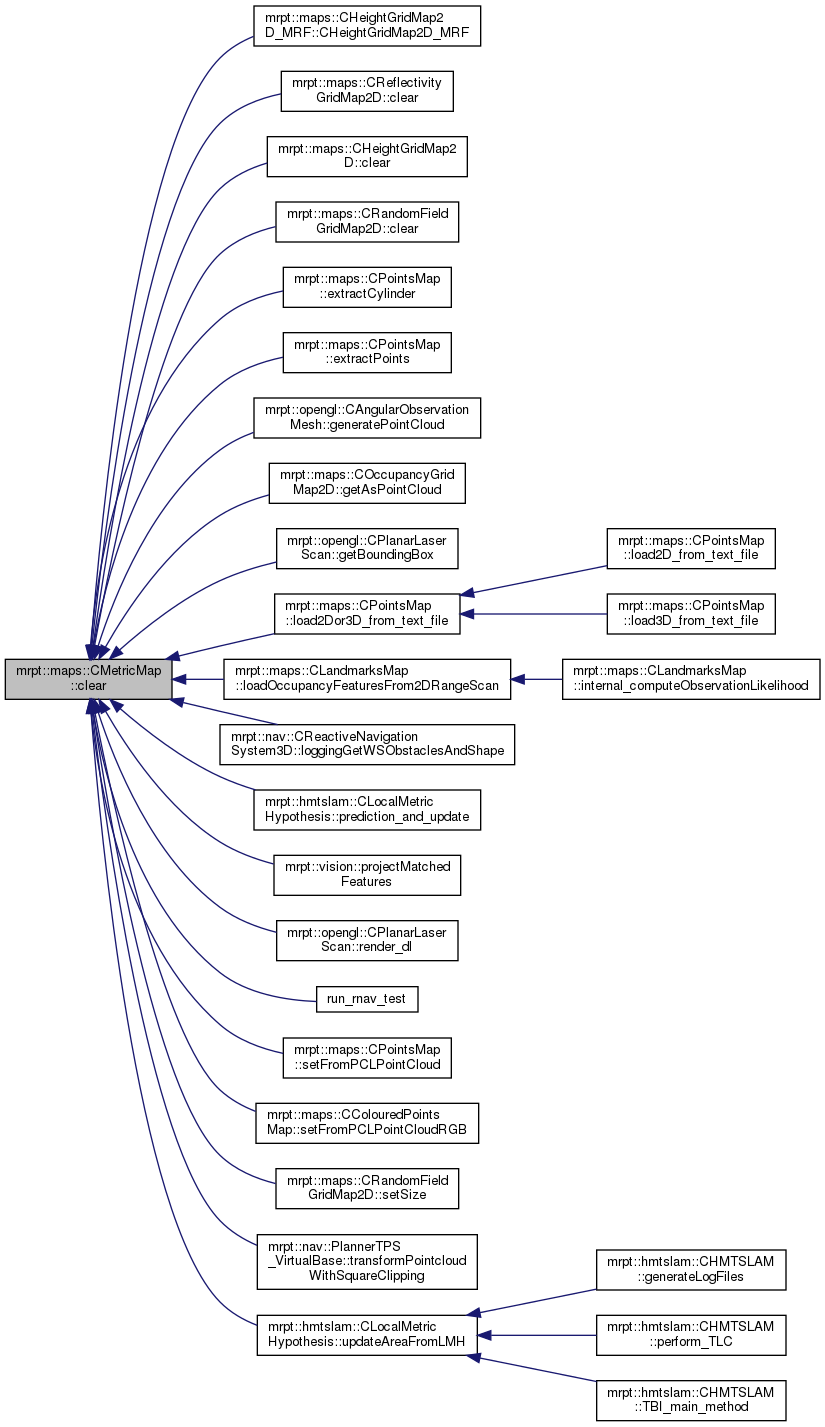
◆ clear()
| void CMetricMap::clear | ( | ) |
Erase all the contents of the map.
Definition at line 31 of file CMetricMap.cpp.
Referenced by mrpt::maps::CHeightGridMap2D_MRF::CHeightGridMap2D_MRF(), mrpt::maps::CHeightGridMap2D::clear(), mrpt::maps::CRandomFieldGridMap2D::clear(), mrpt::maps::CReflectivityGridMap2D::clear(), mrpt::maps::CPointsMap::extractCylinder(), mrpt::maps::CPointsMap::extractPoints(), mrpt::opengl::CAngularObservationMesh::generatePointCloud(), mrpt::maps::COccupancyGridMap2D::getAsPointCloud(), mrpt::opengl::CPlanarLaserScan::getBoundingBox(), mrpt::maps::CPointsMap::load2Dor3D_from_text_file(), mrpt::maps::CLandmarksMap::loadOccupancyFeaturesFrom2DRangeScan(), mrpt::nav::CReactiveNavigationSystem3D::loggingGetWSObstaclesAndShape(), mrpt::hmtslam::CLocalMetricHypothesis::prediction_and_update(), mrpt::vision::projectMatchedFeatures(), mrpt::opengl::CPlanarLaserScan::render_dl(), run_rnav_test(), mrpt::maps::CPointsMap::setFromPCLPointCloud(), mrpt::maps::CColouredPointsMap::setFromPCLPointCloudRGB(), mrpt::maps::CRandomFieldGridMap2D::setSize(), mrpt::nav::PlannerTPS_VirtualBase::transformPointcloudWithSquareClipping(), and mrpt::hmtslam::CLocalMetricHypothesis::updateAreaFromLMH().
◆ clone()
|
pure virtualinherited |
Returns a deep copy (clone) of the object, indepently of its class.
Implemented in mrpt::vision::CFeature, mrpt::obs::CObservationVisualLandmarks, mrpt::maps::CLandmarksMap, mrpt::maps::CLandmark, mrpt::slam::CIncrementalMapPartitioner, mrpt::maps::CMultiMetricMapPDF, mrpt::maps::CRBPFParticleData, mrpt::maps::CMultiMetricMap, mrpt::pbmap::Plane, mrpt::pbmap::PbMap, mrpt::opengl::CVectorField3D, mrpt::opengl::CVectorField2D, mrpt::opengl::CTexturedPlane, mrpt::opengl::CText3D, mrpt::opengl::CText, mrpt::opengl::CSphere, mrpt::opengl::CSimpleLine, mrpt::opengl::CSetOfTriangles, mrpt::opengl::CSetOfTexturedTriangles, mrpt::opengl::CSetOfObjects, mrpt::opengl::CSetOfLines, mrpt::opengl::CPolyhedron, mrpt::opengl::CPointCloudColoured, mrpt::opengl::CPointCloud, mrpt::opengl::COpenGLViewport, mrpt::opengl::COpenGLStandardObject, mrpt::opengl::COpenGLScene, mrpt::opengl::COctoMapVoxels, mrpt::opengl::CMeshFast, mrpt::opengl::CMesh3D, mrpt::opengl::CMesh, mrpt::opengl::CGridPlaneXZ, mrpt::opengl::CGridPlaneXY, mrpt::opengl::CGeneralizedCylinder, mrpt::opengl::CFrustum, mrpt::opengl::CEllipsoidRangeBearing2D, mrpt::opengl::CEllipsoidInverseDepth3D, mrpt::opengl::CEllipsoidInverseDepth2D, mrpt::opengl::CEllipsoid, mrpt::opengl::CDisk, mrpt::opengl::CCylinder, mrpt::opengl::CColorBar, mrpt::opengl::CCamera, mrpt::opengl::CBox, mrpt::opengl::CAxis, mrpt::opengl::CAssimpModel, mrpt::opengl::CArrow, mrpt::opengl::C3DSScene, mrpt::obs::CSensoryFrame, mrpt::obs::CRawlog, mrpt::obs::CObservationWirelessPower, mrpt::obs::CObservationWindSensor, mrpt::obs::CObservationVelodyneScan, mrpt::obs::CObservationStereoImagesFeatures, mrpt::obs::CObservationStereoImages, mrpt::obs::CObservationSkeleton, mrpt::obs::CObservationRobotPose, mrpt::obs::CObservationRGBD360, mrpt::obs::CObservationRFID, mrpt::obs::CObservationReflectivity, mrpt::obs::CObservationRawDAQ, mrpt::obs::CObservationRange, mrpt::obs::CObservationOdometry, mrpt::obs::CObservationIMU, mrpt::obs::CObservationImage, mrpt::obs::CObservationGPS, mrpt::obs::CObservationGasSensors, mrpt::obs::CObservationComment, mrpt::obs::CObservationCANBusJ1939, mrpt::obs::CObservationBearingRange, mrpt::obs::CObservationBeaconRanges, mrpt::obs::CObservationBatteryState, mrpt::obs::CObservation6DFeatures, mrpt::obs::CObservation3DRangeScan, mrpt::obs::CObservation2DRangeScan, mrpt::obs::CActionRobotMovement3D, mrpt::obs::CActionRobotMovement2D, mrpt::obs::CActionCollection, mrpt::maps::TMapGenericParams, mrpt::maps::CSimpleMap, mrpt::nav::CPTG_Holo_Blend, mrpt::nav::CPTG_DiffDrive_CS, mrpt::nav::CPTG_DiffDrive_CCS, mrpt::nav::CPTG_DiffDrive_CC, mrpt::nav::CPTG_DiffDrive_C, mrpt::nav::CPTG_DiffDrive_alpha, mrpt::nav::CMultiObjMotionOpt_Scalarization, mrpt::nav::CLogFileRecord, mrpt::nav::CHolonomicVFF, mrpt::nav::CLogFileRecord_VFF, mrpt::nav::CLogFileRecord_ND, mrpt::nav::CHolonomicND, mrpt::nav::CLogFileRecord_FullEval, mrpt::nav::CHolonomicFullEval, mrpt::opengl::CPlanarLaserScan, mrpt::opengl::CAngularObservationMesh, mrpt::maps::CWirelessPowerGridMap2D, mrpt::maps::CWeightedPointsMap, mrpt::maps::CSimplePointsMap, mrpt::maps::CReflectivityGridMap2D, mrpt::maps::CRandomFieldGridMap3D, mrpt::maps::COctoMap, mrpt::maps::COccupancyGridMap2D, mrpt::maps::CHeightGridMap2D_MRF, mrpt::maps::CHeightGridMap2D, mrpt::maps::CGasConcentrationGridMap2D, mrpt::maps::CColouredPointsMap, mrpt::maps::CColouredOctoMap, mrpt::maps::CBeaconMap, mrpt::maps::CBeacon, mrpt::kinematics::CVehicleVelCmd_Holo, mrpt::kinematics::CVehicleVelCmd_DiffDriven, mrpt::kinematics::CKinematicChain, mrpt::hmtslam::THypothesisIDSet, mrpt::hmtslam::CRobotPosesGraph, mrpt::hmtslam::CLocalMetricHypothesis, mrpt::hmtslam::CLSLAMParticleData, mrpt::hmtslam::CHMTSLAM, mrpt::hmtslam::CHMHMapNode, mrpt::hmtslam::CHMHMapArc, mrpt::hmtslam::CHierarchicalMHMap, mrpt::detectors::CDetectable3D, mrpt::detectors::CDetectable2D, mrpt::utils::TStereoCamera, mrpt::utils::TCamera, mrpt::utils::CTypeSelector, mrpt::utils::CStringList, mrpt::utils::CSimpleDatabase, mrpt::utils::CSimpleDatabaseTable, mrpt::utils::CPropertiesValuesList, mrpt::utils::CMHPropertiesValuesList, mrpt::utils::CMemoryChunk, mrpt::utils::CImage, mrpt::poses::CPoses3DSequence, mrpt::poses::CPoses2DSequence, mrpt::poses::CPosePDFSOG, mrpt::poses::CPosePDFParticles, mrpt::poses::CPosePDFGrid, mrpt::poses::CPosePDFGaussianInf, mrpt::poses::CPosePDFGaussian, mrpt::poses::CPose3DRotVec, mrpt::poses::CPose3DQuatPDFGaussianInf, mrpt::poses::CPose3DQuatPDFGaussian, mrpt::poses::CPose3DQuat, mrpt::poses::CPose3DPDFSOG, mrpt::poses::CPose3DPDFParticles, mrpt::poses::CPose3DPDFGaussianInf, mrpt::poses::CPose3DPDFGaussian, mrpt::poses::CPose3DInterpolator, mrpt::poses::CPose3D, mrpt::poses::CPose2DInterpolator, mrpt::poses::CPose2D, mrpt::poses::CPointPDFSOG, mrpt::poses::CPointPDFParticles, mrpt::poses::TSimple3DPoint, mrpt::poses::CPointPDFGaussian, mrpt::poses::CPoint3D, mrpt::poses::CPoint2DPDFGaussian, mrpt::poses::CPoint2D, mrpt::math::CSplineInterpolator1D, mrpt::math::CPolygon, mrpt::math::CMatrixD, mrpt::math::CMatrixB, and mrpt::math::CMatrix.
Referenced by mrpt::utils::CObject::duplicateGetSmartPtr(), mrpt::obs::CActionCollection::insert(), mrpt::maps::CSimpleMap::insert(), and mrpt::poses::CPoseRandomSampler::setPosePDF().

◆ compute3DMatchingRatio()
|
virtual |
Computes the ratio in [0,1] of correspondences between "this" and the "otherMap" map, whose 6D pose relative to "this" is "otherMapPose" In the case of a multi-metric map, this returns the average between the maps.
This method always return 0 for grid maps.
- Parameters
-
otherMap [IN] The other map to compute the matching with. otherMapPose [IN] The 6D pose of the other map as seen from "this". params [IN] Matching parameters
- Returns
- The matching ratio [0,1]
- See also
- determineMatching2D
Reimplemented in mrpt::maps::CLandmarksMap, mrpt::maps::CMultiMetricMap, mrpt::maps::CReflectivityGridMap2D, mrpt::maps::CRandomFieldGridMap2D, mrpt::maps::CPointsMap, mrpt::maps::COccupancyGridMap2D, mrpt::maps::CHeightGridMap2D, and mrpt::maps::CBeaconMap.
Definition at line 157 of file CMetricMap.cpp.
References MRPT_END, MRPT_START, MRPT_UNUSED_PARAM, and THROW_EXCEPTION.
Referenced by mrpt::maps::CMultiMetricMap::compute3DMatchingRatio().

◆ computeObservationLikelihood() [1/2]
| double CMetricMap::computeObservationLikelihood | ( | const mrpt::obs::CObservation * | obs, |
| const mrpt::poses::CPose2D & | takenFrom | ||
| ) |
This is an overloaded member function, provided for convenience. It differs from the above function only in what argument(s) it accepts.
Definition at line 77 of file CMetricMap.cpp.
◆ computeObservationLikelihood() [2/2]
| double CMetricMap::computeObservationLikelihood | ( | const mrpt::obs::CObservation * | obs, |
| const mrpt::poses::CPose3D & | takenFrom | ||
| ) |
Computes the log-likelihood of a given observation given an arbitrary robot 3D pose.
See: Maps and observations compatibility matrix
- Parameters
-
takenFrom The robot's pose the observation is supposed to be taken from. obs The observation.
- Returns
- This method returns a log-likelihood.
Definition at line 189 of file CMetricMap.cpp.
Referenced by mrpt::slam::CMonteCarloLocalization3D::PF_SLAM_computeObservationLikelihoodForParticle(), mrpt::maps::CMultiMetricMapPDF::PF_SLAM_computeObservationLikelihoodForParticle(), and mrpt::slam::CMonteCarloLocalization2D::PF_SLAM_computeObservationLikelihoodForParticle().

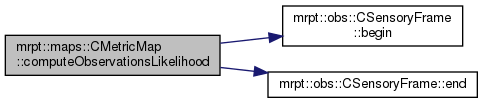
◆ computeObservationsLikelihood()
| double CMetricMap::computeObservationsLikelihood | ( | const mrpt::obs::CSensoryFrame & | sf, |
| const mrpt::poses::CPose2D & | takenFrom | ||
| ) |
Returns the sum of the log-likelihoods of each individual observation within a mrpt::obs::CSensoryFrame.
See: Maps and observations compatibility matrix
- Parameters
-
takenFrom The robot's pose the observation is supposed to be taken from. sf The set of observations in a CSensoryFrame.
- Returns
- This method returns a log-likelihood.
- See also
- canComputeObservationsLikelihood
Definition at line 67 of file CMetricMap.cpp.
References mrpt::obs::CSensoryFrame::begin(), and mrpt::obs::CSensoryFrame::end().
Referenced by mrpt::hmtslam::CLocalMetricHypothesis::auxiliarComputeObservationLikelihood().

◆ determineMatching2D()
|
virtual |
Computes the matching between this and another 2D point map, which includes finding:
- The set of points pairs in each map
- The mean squared distance between corresponding pairs.
The algorithm is:
- For each point in "otherMap":
- Transform the point according to otherMapPose
- Search with a KD-TREE the closest correspondences in "this" map.
- Add to the set of candidate matchings, if it passes all the thresholds in params.
This method is the most time critical one into ICP-like algorithms.
- Parameters
-
otherMap [IN] The other map to compute the matching with. otherMapPose [IN] The pose of the other map as seen from "this". params [IN] Parameters for the determination of pairings. correspondences [OUT] The detected matchings pairs. extraResults [OUT] Other results.
- See also
- compute3DMatchingRatio
Reimplemented in mrpt::maps::CPointsMap, mrpt::maps::COccupancyGridMap2D, mrpt::maps::CBeaconMap, and mrpt::maps::CMultiMetricMap.
Definition at line 127 of file CMetricMap.cpp.
References MRPT_END, MRPT_START, MRPT_UNUSED_PARAM, and THROW_EXCEPTION.
Referenced by mrpt::slam::CICP::ICP_Method_Classic().

◆ determineMatching3D()
|
virtual |
Computes the matchings between this and another 3D points map - method used in 3D-ICP.
This method finds the set of point pairs in each map.
The method is the most time critical one into ICP-like algorithms.
The algorithm is:
- For each point in "otherMap":
- Transform the point according to otherMapPose
- Search with a KD-TREE the closest correspondences in "this" map.
- Add to the set of candidate matchings, if it passes all the thresholds in params.
- Parameters
-
otherMap [IN] The other map to compute the matching with. otherMapPose [IN] The pose of the other map as seen from "this". params [IN] Parameters for the determination of pairings. correspondences [OUT] The detected matchings pairs. extraResults [OUT] Other results.
- See also
- compute3DMatchingRatio
Reimplemented in mrpt::maps::CPointsMap.
Definition at line 142 of file CMetricMap.cpp.
References MRPT_END, MRPT_START, MRPT_UNUSED_PARAM, and THROW_EXCEPTION.
Referenced by mrpt::slam::CICP::ICP3D_Method_Classic().

◆ getAs3DObject()
|
pure virtual |
Returns a 3D object representing the map.
Implemented in mrpt::maps::CLandmarksMap, mrpt::maps::CMultiMetricMap, mrpt::maps::CWirelessPowerGridMap2D, mrpt::maps::CReflectivityGridMap2D, mrpt::maps::CRandomFieldGridMap2D, mrpt::maps::CPointsMap, mrpt::maps::COctoMapBase< OCTREE, OCTREE_NODE >, mrpt::maps::COctoMapBase< octomap::ColorOcTree, octomap::ColorOcTreeNode >, mrpt::maps::COctoMapBase< octomap::OcTree, octomap::OcTreeNode >, mrpt::maps::COccupancyGridMap2D, mrpt::maps::CHeightGridMap2D_MRF, mrpt::maps::CHeightGridMap2D, mrpt::maps::CGasConcentrationGridMap2D, mrpt::maps::CColouredPointsMap, and mrpt::maps::CBeaconMap.
◆ getAsSimplePointsMap() [1/2]
|
inlinevirtual |
Reimplemented in mrpt::maps::CMultiMetricMap, mrpt::maps::CSimplePointsMap, and mrpt::maps::CPointsMap.
Definition at line 305 of file CMetricMap.h.
◆ getAsSimplePointsMap() [2/2]
|
inlinevirtual |
If the map is a simple points map or it's a multi-metric map that contains EXACTLY one simple points map, return it.
Otherwise, return NULL
Reimplemented in mrpt::maps::CMultiMetricMap, mrpt::maps::CSimplePointsMap, and mrpt::maps::CPointsMap.
Definition at line 301 of file CMetricMap.h.
Referenced by mrpt::maps::CPointsMap::compute3DMatchingRatio().

◆ GetRuntimeClass()
|
overridevirtual |
Returns information about the class of an object in runtime.
Reimplemented from mrpt::utils::CSerializable.
Reimplemented in mrpt::maps::CLandmarksMap, mrpt::maps::CMultiMetricMap, mrpt::maps::CWirelessPowerGridMap2D, mrpt::maps::CWeightedPointsMap, mrpt::maps::CSimplePointsMap, mrpt::maps::CReflectivityGridMap2D, mrpt::maps::CRandomFieldGridMap2D, mrpt::maps::CPointsMap, mrpt::maps::COctoMap, mrpt::maps::COccupancyGridMap2D, mrpt::maps::CHeightGridMap2D_MRF, mrpt::maps::CHeightGridMap2D, mrpt::maps::CGasConcentrationGridMap2D, mrpt::maps::CColouredPointsMap, mrpt::maps::CColouredOctoMap, and mrpt::maps::CBeaconMap.
Referenced by mrpt::slam::CGridMapAligner::AlignPDF_correlation(), mrpt::maps::CBeaconMap::compute3DMatchingRatio(), mrpt::maps::CLandmarksMap::compute3DMatchingRatio(), mrpt::maps::CLandmarksMap::computeMatchingWith2D(), mrpt::maps::CBeaconMap::determineMatching2D(), mrpt::maps::COccupancyGridMap2D::determineMatching2D(), mrpt::maps::CPointsMap::determineMatching2D(), mrpt::maps::CPointsMap::determineMatching3D(), mrpt::slam::CICP::ICP3D_Method_Classic(), mrpt::slam::CICP::ICP_Method_LM(), and mrpt::maps::CMultiMetricMap::saveMetricMapRepresentationToFile().
◆ GetRuntimeClassIdStatic()
|
static |
◆ hasSubscribers()
|
inlineprotectedinherited |
Can be called by a derived class before preparing an event for publishing with publishEvent to determine if there is no one subscribed, so it can save the wasted time preparing an event that will be not read.
Definition at line 57 of file CObservable.h.
References mrpt::utils::CObservable::m_subscribers.
Referenced by mrpt::gui::CWindowDialog::OnMouseDown(), mrpt::gui::CWindowDialog::OnMouseMove(), mrpt::gui::CWindowDialog::OnResize(), and mrpt::opengl::COpenGLViewport::render().
◆ insertObservation()
| bool CMetricMap::insertObservation | ( | const mrpt::obs::CObservation * | obs, |
| const mrpt::poses::CPose3D * | robotPose = NULL |
||
| ) |
Insert the observation information into this map.
This method must be implemented in derived classes. See: Maps and observations compatibility matrix
- Parameters
-
obs The observation robotPose The 3D pose of the robot mobile base in the map reference system, or NULL (default) if you want to use the origin.
- See also
- CObservation::insertObservationInto
Definition at line 95 of file CMetricMap.cpp.
Referenced by ICPTests::align2scans(), mrpt::maps::COccupancyGridMap2D::computeObservationLikelihood_likelihoodField_Thrun(), mrpt::opengl::CPlanarLaserScan::getBoundingBox(), mrpt::graphslam::deciders::CRangeScanOps< GRAPH_T >::getICPEdge(), CAngularObservationMesh_fnctr::operator()(), mrpt::opengl::CPlanarLaserScan::render_dl(), TEST(), and mrpt::graphslam::CGraphSlamEngine< GRAPH_T >::updateMapVisualization().

◆ insertObservationPtr()
| bool CMetricMap::insertObservationPtr | ( | const mrpt::obs::CObservation::Ptr & | obs, |
| const mrpt::poses::CPose3D * | robotPose = NULL |
||
| ) |
A wrapper for smart pointers, just calls the non-smart pointer version.
See: Maps and observations compatibility matrix
Definition at line 109 of file CMetricMap.cpp.
References MRPT_END, MRPT_START, and THROW_EXCEPTION.
Referenced by mrpt::slam::CMetricMapBuilderICP::processObservation().

◆ internal_canComputeObservationLikelihood()
|
inlineprivatevirtual |
Internal method called by canComputeObservationLikelihood()
Reimplemented in mrpt::maps::CMultiMetricMap, and mrpt::maps::COccupancyGridMap2D.
Definition at line 74 of file CMetricMap.h.
References MRPT_UNUSED_PARAM.
◆ internal_clear()
|
privatepure virtual |
Internal method called by clear()
Implemented in mrpt::maps::CLandmarksMap, mrpt::maps::CMultiMetricMap, mrpt::maps::CWirelessPowerGridMap2D, mrpt::maps::CWeightedPointsMap, mrpt::maps::CSimplePointsMap, mrpt::maps::CReflectivityGridMap2D, mrpt::maps::CRandomFieldGridMap2D, mrpt::maps::COctoMapBase< OCTREE, OCTREE_NODE >, mrpt::maps::COctoMapBase< octomap::ColorOcTree, octomap::ColorOcTreeNode >, mrpt::maps::COctoMapBase< octomap::OcTree, octomap::OcTreeNode >, mrpt::maps::COccupancyGridMap2D, mrpt::maps::CHeightGridMap2D_MRF, mrpt::maps::CHeightGridMap2D, mrpt::maps::CGasConcentrationGridMap2D, mrpt::maps::CColouredPointsMap, and mrpt::maps::CBeaconMap.
◆ internal_computeObservationLikelihood()
|
privatepure virtual |
Internal method called by computeObservationLikelihood()
Implemented in mrpt::maps::CLandmarksMap, mrpt::maps::CMultiMetricMap, mrpt::maps::CWirelessPowerGridMap2D, mrpt::maps::CReflectivityGridMap2D, mrpt::maps::CPointsMap, mrpt::maps::COctoMapBase< OCTREE, OCTREE_NODE >, mrpt::maps::COctoMapBase< octomap::ColorOcTree, octomap::ColorOcTreeNode >, mrpt::maps::COctoMapBase< octomap::OcTree, octomap::OcTreeNode >, mrpt::maps::COccupancyGridMap2D, mrpt::maps::CHeightGridMap2D_MRF, mrpt::maps::CHeightGridMap2D, mrpt::maps::CGasConcentrationGridMap2D, and mrpt::maps::CBeaconMap.
◆ internal_insertObservation()
|
privatepure virtual |
Internal method called by insertObservation()
Implemented in mrpt::maps::CLandmarksMap, mrpt::maps::CMultiMetricMap, mrpt::maps::CWirelessPowerGridMap2D, mrpt::maps::CReflectivityGridMap2D, mrpt::maps::COccupancyGridMap2D, mrpt::maps::CHeightGridMap2D_MRF, mrpt::maps::CHeightGridMap2D, mrpt::maps::CGasConcentrationGridMap2D, mrpt::maps::CBeaconMap, mrpt::maps::CPointsMap, mrpt::maps::COctoMap, and mrpt::maps::CColouredOctoMap.
◆ internal_observer_begin()
Definition at line 28 of file CObservable.cpp.
◆ internal_observer_end()
Definition at line 33 of file CObservable.cpp.
References ASSERTMSG_, MRPT_END, and MRPT_START.
◆ isEmpty()
|
pure virtual |
Returns true if the map is empty/no observation has been inserted.
Implemented in mrpt::maps::CLandmarksMap, mrpt::maps::CMultiMetricMap, mrpt::maps::CReflectivityGridMap2D, mrpt::maps::CRandomFieldGridMap2D, mrpt::maps::CPointsMap, mrpt::maps::COctoMapBase< OCTREE, OCTREE_NODE >, mrpt::maps::COctoMapBase< octomap::ColorOcTree, octomap::ColorOcTreeNode >, mrpt::maps::COctoMapBase< octomap::OcTree, octomap::OcTreeNode >, mrpt::maps::COccupancyGridMap2D, mrpt::maps::CHeightGridMap2D, and mrpt::maps::CBeaconMap.
Referenced by mrpt::slam::CICP::ICP_Method_Classic(), mrpt::slam::CICP::ICP_Method_LM(), and mrpt::slam::CMetricMapBuilderICP::processObservation().
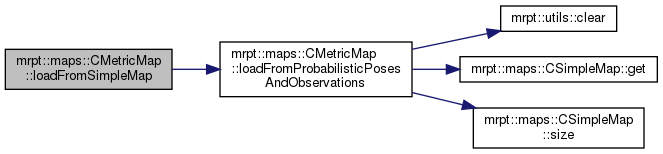
◆ loadFromProbabilisticPosesAndObservations()
| void CMetricMap::loadFromProbabilisticPosesAndObservations | ( | const mrpt::maps::CSimpleMap & | Map | ) |
Load the map contents from a CSimpleMap object, erasing all previous content of the map.
This is done invoking insertObservation() for each observation at the mean 3D robot pose of each pose-observations pair in the CSimpleMap object.
- See also
- insertObservation, CSimpleMap
- Exceptions
-
std::exception Some internal steps in invoked methods can raise exceptions on invalid parameters, etc...
Definition at line 37 of file CMetricMap.cpp.
References ASSERTMSG_, mrpt::utils::clear(), mrpt::maps::CSimpleMap::get(), and mrpt::maps::CSimpleMap::size().
Referenced by loadFromSimpleMap(), and run_test_pf_localization().
◆ loadFromSimpleMap()
|
inline |
!This is an overloaded member function, provided for convenience. It differs from the above function only in what argument(s) it accepts.
Definition at line 109 of file CMetricMap.h.
References loadFromProbabilisticPosesAndObservations().
Referenced by mrpt::maps::CRandomFieldGridMap2D::internal_clear().

◆ OnPostSuccesfulInsertObs()
|
inlineprivatevirtual |
Hook for each time a "internal_insertObservation" returns "true" This is called automatically from insertObservation() when internal_insertObservation returns true.
Reimplemented in mrpt::maps::COccupancyGridMap2D.
Definition at line 85 of file CMetricMap.h.
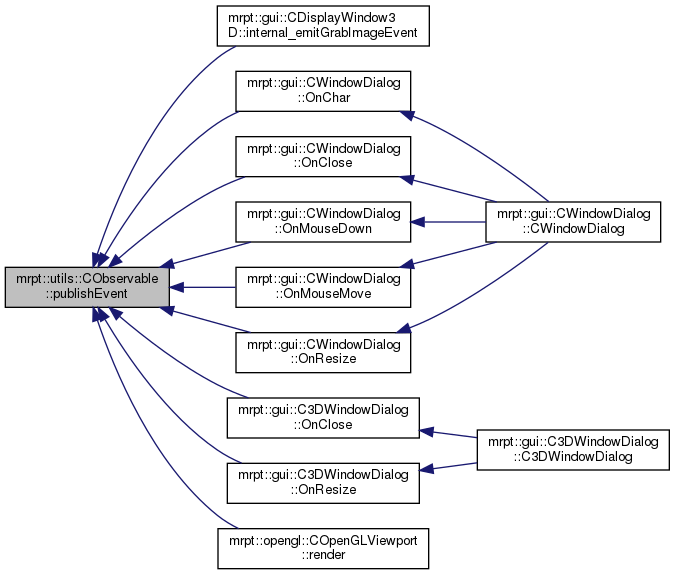
◆ publishEvent()
Called when you want this object to emit an event to all the observers currently subscribed to this object.
Definition at line 47 of file CObservable.cpp.
References MRPT_END, and MRPT_START.
Referenced by mrpt::gui::CDisplayWindow3D::internal_emitGrabImageEvent(), mrpt::gui::CWindowDialog::OnChar(), mrpt::gui::CWindowDialog::OnClose(), mrpt::gui::C3DWindowDialog::OnClose(), mrpt::gui::CWindowDialog::OnMouseDown(), mrpt::gui::CWindowDialog::OnMouseMove(), mrpt::gui::CWindowDialog::OnResize(), mrpt::gui::C3DWindowDialog::OnResize(), and mrpt::opengl::COpenGLViewport::render().
◆ readFromStream()
|
protectedpure virtualinherited |
Introduces a pure virtual method responsible for loading from a CStream This can not be used directly be users, instead use "stream >> object;" for reading it from a stream or "stream >> object_ptr;" if the class is unknown apriori.
- Parameters
-
in The input binary stream where the object data must read from. version The version of the object stored in the stream: use this version number in your code to know how to read the incoming data.
- Exceptions
-
std::exception On any error, see CStream::ReadBuffer
- See also
- CStream
Implemented in mrpt::vision::CFeature, mrpt::obs::CObservationVisualLandmarks, mrpt::maps::CLandmarksMap, mrpt::maps::CLandmark, mrpt::slam::CIncrementalMapPartitioner, mrpt::maps::CMultiMetricMapPDF, mrpt::maps::CRBPFParticleData, mrpt::maps::CMultiMetricMap, mrpt::pbmap::Plane, mrpt::pbmap::PbMap, mrpt::opengl::CVectorField3D, mrpt::opengl::CVectorField2D, mrpt::opengl::CTexturedPlane, mrpt::opengl::CText3D, mrpt::opengl::CText, mrpt::opengl::CSphere, mrpt::opengl::CSimpleLine, mrpt::opengl::CSetOfTriangles, mrpt::opengl::CSetOfTexturedTriangles, mrpt::opengl::CSetOfObjects, mrpt::opengl::CSetOfLines, mrpt::opengl::CPolyhedron, mrpt::opengl::CPointCloudColoured, mrpt::opengl::CPointCloud, mrpt::opengl::COpenGLViewport, mrpt::opengl::COpenGLStandardObject, mrpt::opengl::COpenGLScene, mrpt::opengl::COctoMapVoxels, mrpt::opengl::CMeshFast, mrpt::opengl::CMesh3D, mrpt::opengl::CMesh, mrpt::opengl::CGridPlaneXZ, mrpt::opengl::CGridPlaneXY, mrpt::opengl::CGeneralizedCylinder, mrpt::opengl::CFrustum, mrpt::opengl::CEllipsoidRangeBearing2D, mrpt::opengl::CEllipsoidInverseDepth3D, mrpt::opengl::CEllipsoidInverseDepth2D, mrpt::opengl::CEllipsoid, mrpt::opengl::CDisk, mrpt::opengl::CCylinder, mrpt::opengl::CColorBar, mrpt::opengl::CCamera, mrpt::opengl::CBox, mrpt::opengl::CAxis, mrpt::opengl::CAssimpModel, mrpt::opengl::CArrow, mrpt::opengl::C3DSScene, mrpt::obs::CSensoryFrame, mrpt::obs::CRawlog, mrpt::obs::CObservationWirelessPower, mrpt::obs::CObservationWindSensor, mrpt::obs::CObservationVelodyneScan, mrpt::obs::CObservationStereoImagesFeatures, mrpt::obs::CObservationStereoImages, mrpt::obs::CObservationSkeleton, mrpt::obs::CObservationRobotPose, mrpt::obs::CObservationRGBD360, mrpt::obs::CObservationRFID, mrpt::obs::CObservationReflectivity, mrpt::obs::CObservationRawDAQ, mrpt::obs::CObservationRange, mrpt::obs::CObservationOdometry, mrpt::obs::CObservationIMU, mrpt::obs::CObservationImage, mrpt::obs::CObservationGPS, mrpt::obs::CObservationGasSensors, mrpt::obs::CObservationComment, mrpt::obs::CObservationCANBusJ1939, mrpt::obs::CObservationBearingRange, mrpt::obs::CObservationBeaconRanges, mrpt::obs::CObservationBatteryState, mrpt::obs::CObservation6DFeatures, mrpt::obs::CObservation3DRangeScan, mrpt::obs::CObservation2DRangeScan, mrpt::obs::CActionRobotMovement3D, mrpt::obs::CActionRobotMovement2D, mrpt::obs::CActionCollection, mrpt::maps::TMapGenericParams, mrpt::maps::CSimpleMap, mrpt::nav::CPTG_Holo_Blend, mrpt::nav::CPTG_DiffDrive_CS, mrpt::nav::CPTG_DiffDrive_CCS, mrpt::nav::CPTG_DiffDrive_CC, mrpt::nav::CPTG_DiffDrive_C, mrpt::nav::CPTG_DiffDrive_alpha, mrpt::nav::CLogFileRecord, mrpt::nav::CHolonomicVFF, mrpt::nav::CLogFileRecord_VFF, mrpt::nav::CLogFileRecord_ND, mrpt::nav::CHolonomicND, mrpt::nav::CLogFileRecord_FullEval, mrpt::nav::CHolonomicFullEval, mrpt::opengl::CPlanarLaserScan, mrpt::opengl::CAngularObservationMesh, mrpt::maps::CWirelessPowerGridMap2D, mrpt::maps::CWeightedPointsMap, mrpt::maps::CSimplePointsMap, mrpt::maps::CReflectivityGridMap2D, mrpt::maps::CRandomFieldGridMap3D, mrpt::maps::COctoMap, mrpt::maps::COccupancyGridMap2D, mrpt::maps::CHeightGridMap2D_MRF, mrpt::maps::CHeightGridMap2D, mrpt::maps::CGasConcentrationGridMap2D, mrpt::maps::CColouredPointsMap, mrpt::maps::CColouredOctoMap, mrpt::maps::CBeaconMap, mrpt::maps::CBeacon, mrpt::kinematics::CVehicleVelCmd_Holo, mrpt::kinematics::CVehicleVelCmd_DiffDriven, mrpt::kinematics::CKinematicChain, mrpt::hmtslam::THypothesisIDSet, mrpt::hmtslam::CRobotPosesGraph, mrpt::hmtslam::CLocalMetricHypothesis, mrpt::hmtslam::CLSLAMParticleData, mrpt::hmtslam::CHMTSLAM, mrpt::hmtslam::CHMHMapNode, mrpt::hmtslam::CHMHMapArc, mrpt::hmtslam::CHierarchicalMHMap, mrpt::detectors::CDetectable3D, mrpt::detectors::CDetectable2D, mrpt::utils::TStereoCamera, mrpt::utils::TCamera, mrpt::utils::CTypeSelector, mrpt::utils::CStringList, mrpt::utils::CSimpleDatabase, mrpt::utils::CSimpleDatabaseTable, mrpt::utils::CPropertiesValuesList, mrpt::utils::CMHPropertiesValuesList, mrpt::utils::CMemoryChunk, mrpt::utils::CImage, mrpt::poses::CPoses3DSequence, mrpt::poses::CPoses2DSequence, mrpt::poses::CPosePDFSOG, mrpt::poses::CPosePDFParticles, mrpt::poses::CPosePDFGrid, mrpt::poses::CPosePDFGaussianInf, mrpt::poses::CPosePDFGaussian, mrpt::poses::CPose3DRotVec, mrpt::poses::CPose3DQuatPDFGaussianInf, mrpt::poses::CPose3DQuatPDFGaussian, mrpt::poses::CPose3DQuat, mrpt::poses::CPose3DPDFSOG, mrpt::poses::CPose3DPDFParticles, mrpt::poses::CPose3DPDFGaussianInf, mrpt::poses::CPose3DPDFGaussian, mrpt::poses::CPose3DInterpolator, mrpt::poses::CPose3D, mrpt::poses::CPose2DInterpolator, mrpt::poses::CPose2D, mrpt::poses::CPointPDFSOG, mrpt::poses::CPointPDFParticles, mrpt::poses::TSimple3DPoint, mrpt::poses::CPointPDFGaussian, mrpt::poses::CPoint3D, mrpt::poses::CPoint2DPDFGaussian, mrpt::poses::CPoint2D, mrpt::math::CSplineInterpolator1D, mrpt::math::CPolygon, mrpt::math::CMatrixD, mrpt::math::CMatrixB, and mrpt::math::CMatrix.
Referenced by mrpt::nav::CLogFileRecord::readFromStream().

◆ saveMetricMapRepresentationToFile()
|
pure virtual |
This virtual method saves the map to a file "filNamePrefix"+< some_file_extension >, as an image or in any other applicable way (Notice that other methods to save the map may be implemented in classes implementing this virtual interface).
Implemented in mrpt::maps::CLandmarksMap, mrpt::maps::CMultiMetricMap, mrpt::maps::CReflectivityGridMap2D, mrpt::maps::CRandomFieldGridMap2D, mrpt::maps::CPointsMap, mrpt::maps::COctoMapBase< OCTREE, OCTREE_NODE >, mrpt::maps::COctoMapBase< octomap::ColorOcTree, octomap::ColorOcTreeNode >, mrpt::maps::COctoMapBase< octomap::OcTree, octomap::OcTreeNode >, mrpt::maps::COccupancyGridMap2D, mrpt::maps::CHeightGridMap2D, and mrpt::maps::CBeaconMap.
Referenced by mrpt::maps::CMultiMetricMap::saveMetricMapRepresentationToFile().

◆ squareDistanceToClosestCorrespondence()
|
virtual |
Returns the square distance from the 2D point (x0,y0) to the closest correspondence in the map.
Reimplemented in mrpt::maps::CPointsMap.
Definition at line 170 of file CMetricMap.cpp.
References MRPT_END, MRPT_START, MRPT_UNUSED_PARAM, and THROW_EXCEPTION.
◆ writeToMatlab()
|
inlinevirtualinherited |
Introduces a pure virtual method responsible for writing to a mxArray Matlab object, typically a MATLAB struct whose contents are documented in each derived class.
- Returns
- A new
mxArray(caller is responsible of memory freeing) or nullptr is class does not support conversion to MATLAB.
Definition at line 89 of file CSerializable.h.
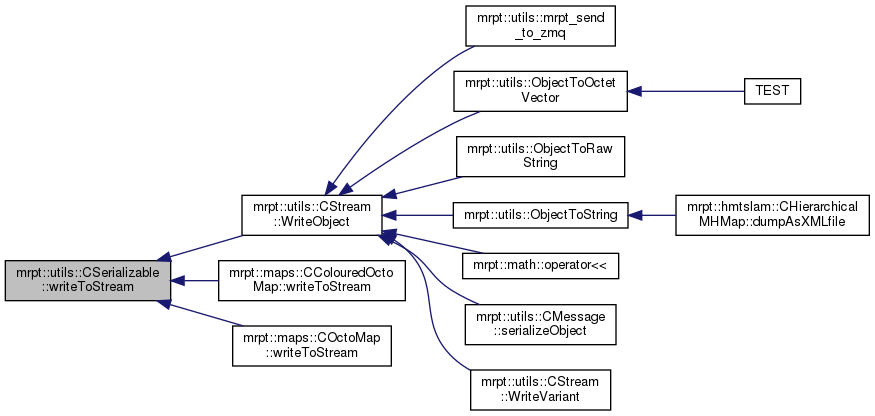
◆ writeToStream()
|
protectedpure virtualinherited |
Introduces a pure virtual method responsible for writing to a CStream.
This can not be used directly be users, instead use "stream << object;" for writing it to a stream.
- Parameters
-
out The output binary stream where object must be dumped. getVersion If nullptr, the object must be dumped. If not, only the version of the object dump must be returned in this pointer. This enables the versioning of objects dumping and backward compatibility with previously stored data.
- Exceptions
-
std::exception On any error, see CStream::WriteBuffer
- See also
- CStream
Implemented in mrpt::vision::CFeature, mrpt::obs::CObservationVisualLandmarks, mrpt::maps::CLandmarksMap, mrpt::maps::CLandmark, mrpt::slam::CIncrementalMapPartitioner, mrpt::maps::CMultiMetricMapPDF, mrpt::maps::CRBPFParticleData, mrpt::maps::CMultiMetricMap, mrpt::pbmap::Plane, mrpt::pbmap::PbMap, mrpt::opengl::CVectorField3D, mrpt::opengl::CVectorField2D, mrpt::opengl::CTexturedPlane, mrpt::opengl::CText3D, mrpt::opengl::CText, mrpt::opengl::CSphere, mrpt::opengl::CSimpleLine, mrpt::opengl::CSetOfTriangles, mrpt::opengl::CSetOfTexturedTriangles, mrpt::opengl::CSetOfObjects, mrpt::opengl::CSetOfLines, mrpt::opengl::CPolyhedron, mrpt::opengl::CPointCloudColoured, mrpt::opengl::CPointCloud, mrpt::opengl::COpenGLViewport, mrpt::opengl::COpenGLStandardObject, mrpt::opengl::COpenGLScene, mrpt::opengl::COctoMapVoxels, mrpt::opengl::CMeshFast, mrpt::opengl::CMesh3D, mrpt::opengl::CMesh, mrpt::opengl::CGridPlaneXZ, mrpt::opengl::CGridPlaneXY, mrpt::opengl::CGeneralizedCylinder, mrpt::opengl::CFrustum, mrpt::opengl::CEllipsoidRangeBearing2D, mrpt::opengl::CEllipsoidInverseDepth3D, mrpt::opengl::CEllipsoidInverseDepth2D, mrpt::opengl::CEllipsoid, mrpt::opengl::CDisk, mrpt::opengl::CCylinder, mrpt::opengl::CColorBar, mrpt::opengl::CCamera, mrpt::opengl::CBox, mrpt::opengl::CAxis, mrpt::opengl::CAssimpModel, mrpt::opengl::CArrow, mrpt::opengl::C3DSScene, mrpt::obs::CSensoryFrame, mrpt::obs::CRawlog, mrpt::obs::CObservationWirelessPower, mrpt::obs::CObservationWindSensor, mrpt::obs::CObservationVelodyneScan, mrpt::obs::CObservationStereoImagesFeatures, mrpt::obs::CObservationStereoImages, mrpt::obs::CObservationSkeleton, mrpt::obs::CObservationRobotPose, mrpt::obs::CObservationRGBD360, mrpt::obs::CObservationRFID, mrpt::obs::CObservationReflectivity, mrpt::obs::CObservationRawDAQ, mrpt::obs::CObservationRange, mrpt::obs::CObservationOdometry, mrpt::obs::CObservationIMU, mrpt::obs::CObservationImage, mrpt::obs::CObservationGPS, mrpt::obs::CObservationGasSensors, mrpt::obs::CObservationComment, mrpt::obs::CObservationCANBusJ1939, mrpt::obs::CObservationBearingRange, mrpt::obs::CObservationBeaconRanges, mrpt::obs::CObservationBatteryState, mrpt::obs::CObservation6DFeatures, mrpt::obs::CObservation3DRangeScan, mrpt::obs::CObservation2DRangeScan, mrpt::obs::CActionRobotMovement3D, mrpt::obs::CActionRobotMovement2D, mrpt::obs::CActionCollection, mrpt::maps::TMapGenericParams, mrpt::maps::CSimpleMap, mrpt::nav::CPTG_Holo_Blend, mrpt::nav::CPTG_DiffDrive_CS, mrpt::nav::CPTG_DiffDrive_CCS, mrpt::nav::CPTG_DiffDrive_CC, mrpt::nav::CPTG_DiffDrive_C, mrpt::nav::CPTG_DiffDrive_alpha, mrpt::nav::CLogFileRecord, mrpt::nav::CHolonomicVFF, mrpt::nav::CLogFileRecord_VFF, mrpt::nav::CLogFileRecord_ND, mrpt::nav::CHolonomicND, mrpt::nav::CLogFileRecord_FullEval, mrpt::nav::CHolonomicFullEval, mrpt::opengl::CPlanarLaserScan, mrpt::opengl::CAngularObservationMesh, mrpt::maps::CWirelessPowerGridMap2D, mrpt::maps::CWeightedPointsMap, mrpt::maps::CSimplePointsMap, mrpt::maps::CReflectivityGridMap2D, mrpt::maps::CRandomFieldGridMap3D, mrpt::maps::COctoMap, mrpt::maps::COccupancyGridMap2D, mrpt::maps::CHeightGridMap2D_MRF, mrpt::maps::CHeightGridMap2D, mrpt::maps::CGasConcentrationGridMap2D, mrpt::maps::CColouredPointsMap, mrpt::maps::CColouredOctoMap, mrpt::maps::CBeaconMap, mrpt::maps::CBeacon, mrpt::kinematics::CVehicleVelCmd_Holo, mrpt::kinematics::CVehicleVelCmd_DiffDriven, mrpt::kinematics::CKinematicChain, mrpt::hmtslam::THypothesisIDSet, mrpt::hmtslam::CRobotPosesGraph, mrpt::hmtslam::CLocalMetricHypothesis, mrpt::hmtslam::CLSLAMParticleData, mrpt::hmtslam::CHMTSLAM, mrpt::hmtslam::CHMHMapNode, mrpt::hmtslam::CHMHMapArc, mrpt::hmtslam::CHierarchicalMHMap, mrpt::detectors::CDetectable3D, mrpt::detectors::CDetectable2D, mrpt::utils::TStereoCamera, mrpt::utils::TCamera, mrpt::utils::CTypeSelector, mrpt::utils::CStringList, mrpt::utils::CSimpleDatabase, mrpt::utils::CSimpleDatabaseTable, mrpt::utils::CPropertiesValuesList, mrpt::utils::CMHPropertiesValuesList, mrpt::utils::CMemoryChunk, mrpt::utils::CImage, mrpt::poses::CPoses3DSequence, mrpt::poses::CPoses2DSequence, mrpt::poses::CPosePDFSOG, mrpt::poses::CPosePDFParticles, mrpt::poses::CPosePDFGrid, mrpt::poses::CPosePDFGaussianInf, mrpt::poses::CPosePDFGaussian, mrpt::poses::CPose3DRotVec, mrpt::poses::CPose3DQuatPDFGaussianInf, mrpt::poses::CPose3DQuatPDFGaussian, mrpt::poses::CPose3DQuat, mrpt::poses::CPose3DPDFSOG, mrpt::poses::CPose3DPDFParticles, mrpt::poses::CPose3DPDFGaussianInf, mrpt::poses::CPose3DPDFGaussian, mrpt::poses::CPose3DInterpolator, mrpt::poses::CPose3D, mrpt::poses::CPose2DInterpolator, mrpt::poses::CPose2D, mrpt::poses::CPointPDFSOG, mrpt::poses::CPointPDFParticles, mrpt::poses::TSimple3DPoint, mrpt::poses::CPointPDFGaussian, mrpt::poses::CPoint3D, mrpt::poses::CPoint2DPDFGaussian, mrpt::poses::CPoint2D, mrpt::math::CSplineInterpolator1D, mrpt::math::CPolygon, mrpt::math::CMatrixD, mrpt::math::CMatrixB, and mrpt::math::CMatrix.
Referenced by mrpt::utils::CStream::WriteObject(), mrpt::maps::CColouredOctoMap::writeToStream(), and mrpt::maps::COctoMap::writeToStream().
Friends And Related Function Documentation
◆ mrpt::utils::CStream
|
friend |
Definition at line 58 of file CMetricMap.h.
Member Data Documentation
◆ genericMapParams
| TMapGenericParams mrpt::maps::CMetricMap::genericMapParams |
Common params to all maps.
Definition at line 281 of file CMetricMap.h.
Referenced by mrpt::maps::internal::TMetricMapTypesRegistry::factoryMapObjectFromDefinition(), mrpt::maps::CBeaconMap::getAs3DObject(), mrpt::maps::CGasConcentrationGridMap2D::getAs3DObject(), mrpt::maps::CHeightGridMap2D::getAs3DObject(), mrpt::maps::CPointsMap::getAs3DObject(), mrpt::maps::CRandomFieldGridMap2D::getAs3DObject(), mrpt::maps::CReflectivityGridMap2D::getAs3DObject(), mrpt::maps::CWirelessPowerGridMap2D::getAs3DObject(), mrpt::maps::CLandmarksMap::getAs3DObject(), mrpt::maps::CGasConcentrationGridMap2D::readFromStream(), mrpt::maps::CHeightGridMap2D::readFromStream(), mrpt::maps::CReflectivityGridMap2D::readFromStream(), mrpt::maps::CWirelessPowerGridMap2D::readFromStream(), mrpt::maps::CGasConcentrationGridMap2D::writeToStream(), mrpt::maps::CHeightGridMap2D::writeToStream(), mrpt::maps::CReflectivityGridMap2D::writeToStream(), and mrpt::maps::CWirelessPowerGridMap2D::writeToStream().
◆ m_subscribers
|
privateinherited |
Definition at line 44 of file CObservable.h.
Referenced by mrpt::utils::CObservable::hasSubscribers().
◆ runtimeClassId
|
staticprotected |
Definition at line 58 of file CMetricMap.h.