Namespaces | |
| detail | |
| internal | |
Classes | |
| class | CBeacon |
| The class for storing individual "beacon landmarks" under a variety of 3D position PDF distributions. More... | |
| class | CBeaconMap |
| A class for storing a map of 3D probabilistic beacons, using a Montecarlo, Gaussian, or Sum of Gaussians (SOG) representation (for range-only SLAM). More... | |
| class | CColouredOctoMap |
| A three-dimensional probabilistic occupancy grid, implemented as an octo-tree with the "octomap" C++ library. More... | |
| class | CColouredPointsMap |
| A map of 2D/3D points with individual colours (RGB). More... | |
| class | CGasConcentrationGridMap2D |
| CGasConcentrationGridMap2D represents a PDF of gas concentrations over a 2D area. More... | |
| struct | THeightGridmapCell |
| The contents of each cell in a CHeightGridMap2D map. More... | |
| class | CHeightGridMap2D |
| Digital Elevation Model (DEM), a mesh or grid representation of a surface which keeps the estimated height for each (x,y) location. More... | |
| class | CHeightGridMap2D_Base |
| Virtual base class for Digital Elevation Model (DEM) maps. More... | |
| class | CHeightGridMap2D_MRF |
| CHeightGridMap2D_MRF represents digital-elevation-model over a 2D area, with uncertainty, based on a Markov-Random-Field (MRF) estimator. More... | |
| struct | CLogOddsGridMap2D |
| A generic provider of log-odds grid-map maintainance functions. More... | |
| struct | CLogOddsGridMapLUT |
| One static instance of this struct should exist in any class implementing CLogOddsGridMap2D to hold the Look-up-tables (LUTs) for log-odss Bayesian update. More... | |
| class | COccupancyGridMap2D |
| A class for storing an occupancy grid map. More... | |
| class | COctoMap |
| A three-dimensional probabilistic occupancy grid, implemented as an octo-tree with the "octomap" C++ library. More... | |
| class | COctoMapBase |
| A three-dimensional probabilistic occupancy grid, implemented as an octo-tree with the "octomap" C++ library. More... | |
| class | CPointCloudFilterBase |
| Virtual base class for all point-cloud filtering algorithm. More... | |
| class | CPointCloudFilterByDistance |
| Implementation of pointcloud filtering based on requisities for minimum neigbouring points in both, the current timestamp and a previous one. More... | |
| class | CPointsMap |
| A cloud of points in 2D or 3D, which can be built from a sequence of laser scans or other sensors. More... | |
| struct | LAS_WriteParams |
| Optional settings for saveLASFile() More... | |
| struct | LAS_LoadParams |
| Optional settings for loadLASFile() More... | |
| struct | LAS_HeaderInfo |
| Extra information gathered from the LAS file header. More... | |
| struct | TRandomFieldCell |
| The contents of each cell in a CRandomFieldGridMap2D map. More... | |
| class | CRandomFieldGridMap2D |
| CRandomFieldGridMap2D represents a 2D grid map where each cell is associated one real-valued property which is estimated by this map, either as a simple value or as a probility distribution (for each cell). More... | |
| struct | TRandomFieldVoxel |
| The contents of each voxel in a CRandomFieldGridMap3D map. More... | |
| class | CRandomFieldGridMap3D |
| CRandomFieldGridMap3D represents a 3D regular grid where each voxel is associated one real-valued property which is to be estimated by this class. More... | |
| class | CReflectivityGridMap2D |
| A 2D grid map representing the reflectivity of the environment (for example, measured with an IR proximity sensor). More... | |
| class | CSimplePointsMap |
| A cloud of points in 2D or 3D, which can be built from a sequence of laser scans. More... | |
| class | CWeightedPointsMap |
| A cloud of points in 2D or 3D, which can be built from a sequence of laser scans. More... | |
| class | CWirelessPowerGridMap2D |
| CWirelessPowerGridMap2D represents a PDF of wifi concentrations over a 2D area. More... | |
| class | CMetricMap |
| Declares a virtual base class for all metric maps storage classes. More... | |
| class | mrptEventMetricMapClear |
| Event emitted by a metric up upon call of clear() More... | |
| class | mrptEventMetricMapInsert |
| Event emitted by a metric up upon a succesful call to insertObservation() More... | |
| class | CSimpleMap |
| This class stores a sequence of <Probabilistic Pose,SensoryFrame> pairs, thus a "metric map" can be totally determined with this information. More... | |
| struct | TMatchingParams |
| Parameters for the determination of matchings between point clouds, etc. More... | |
| struct | TMatchingExtraResults |
| Additional results from the determination of matchings between point clouds, etc., apart from the pairings themselves. More... | |
| struct | TMatchingRatioParams |
| Parameters for CMetricMap::compute3DMatchingRatio() More... | |
| class | TMapGenericParams |
| Common params to all maps derived from mrpt::maps::CMetricMap More... | |
| struct | TMetricMapInitializer |
Virtual base for specifying the kind and parameters of one map (normally, to be inserted into mrpt::maps::CMultiMetricMap) See mrpt::maps::TSetOfMetricMapInitializers::loadFromConfigFile() as an easy way of initialize this object, or construct with the factory methods <metric_map_class>::MapDefinition() and TMetricMapInitializer::factory() More... | |
| class | TSetOfMetricMapInitializers |
| A set of TMetricMapInitializer structures, passed to the constructor CMultiMetricMap::CMultiMetricMap See the comments for TSetOfMetricMapInitializers::loadFromConfigFile, and "CMultiMetricMap::setListOfMaps" for effectively creating the list of desired maps. More... | |
| class | CMultiMetricMap |
| This class stores any customizable set of metric maps. More... | |
| class | CRBPFParticleData |
| Auxiliary class used in mrpt::maps::CMultiMetricMapPDF. More... | |
| class | CMultiMetricMapPDFParticles |
| class | CMultiMetricMapPDF |
| Declares a class that represents a Rao-Blackwellized set of particles for solving the SLAM problem (This class is the base of RBPF-SLAM applications). More... | |
| class | CLandmark |
| The class for storing "landmarks" (visual or laser-scan-extracted features,...) More... | |
| class | CLandmarksMap |
| A class for storing a map of 3D probabilistic landmarks. More... | |
Typedefs | |
| typedef std::deque< CMetricMap * > | TMetricMapList |
| A list of metric maps (used in the mrpt::poses::CPosePDFParticles class): More... | |
Typedef Documentation
◆ TMetricMapList
| typedef std::deque<CMetricMap*> mrpt::maps::TMetricMapList |
A list of metric maps (used in the mrpt::poses::CPosePDFParticles class):
Definition at line 314 of file CMetricMap.h.
Function Documentation
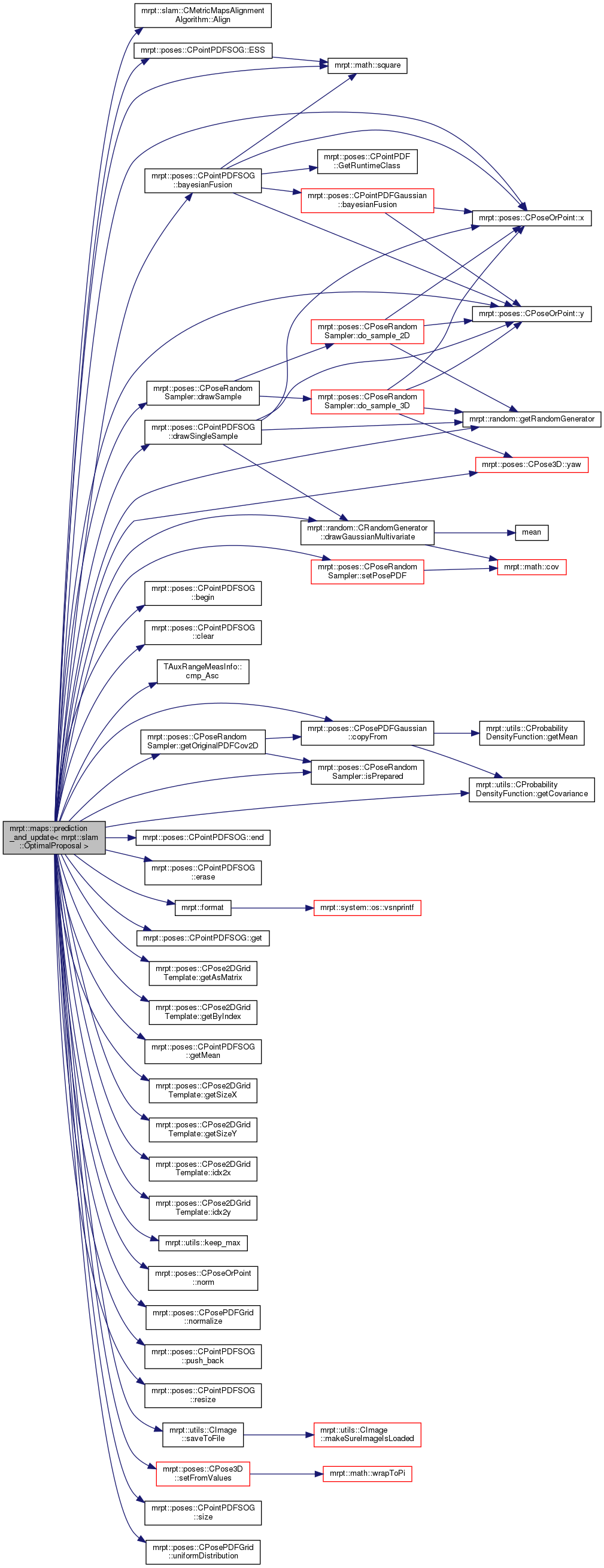
◆ CMultiMetricMapPDF::prediction_and_update< mrpt::slam::OptimalProposal >()
| void mrpt::maps::CMultiMetricMapPDF::prediction_and_update< mrpt::slam::OptimalProposal > | ( | const mrpt::obs::CActionCollection * | actions, |
| const mrpt::obs::CSensoryFrame * | sf, | ||
| const bayes::CParticleFilter::TParticleFilterOptions & | PF_options | ||
| ) |
if (prior_dist_lin>0.10 || prior_dist_ang>DEG2RAD(3)) / printf(" >>>>>>>>>> %f %f\n",prior_dist_lin,RAD2DEG(prior_dist_ang));
- Todo:
- Add paper ref!
/ COpenGLScene scene; opengl::CSetOfObjects *obj = new opengl::CSetOfObjects(); fusedObsModels.getAs3DObject( *obj ); scene.insert( obj ); CFileStream("debug.3Dscene",fomWrite) << scene; cout << "fusedObsModels # of modes: " << fusedObsModels.m_modes.size() << endl; printf("ESS: %f\n",fusedObsModels.ESS() ); cout << fusedObsModels.getEstimatedCovariance() << endl; mrpt::system::pause(); /
/ CPointPDFSOG newObsModel; (itBeacs)->generateObservationModelDistribution( sensedRange, newObsModel, beacMap, The beacon map, for options itObs->sensorLocationOnRobot,// Sensor location on robot centerPositionPrior, centerPositionPriorRadius ); /
- Todo:
- If there are 2+ sensors on the robot, compute phi?
Definition at line 168 of file CMultiMetricMapPDF_RBPF.cpp.
References mrpt::slam::CMetricMapsAlignmentAlgorithm::Align(), ASSERT_, mrpt::poses::CPointPDFSOG::bayesianFusion(), TAuxRangeMeasInfo::beaconID, mrpt::poses::CPointPDFSOG::begin(), mrpt::obs::CSensoryFrame::begin(), mrpt::poses::CPointPDFSOG::clear(), TAuxRangeMeasInfo::cmp_Asc(), mrpt::poses::CPosePDFGaussian::copyFrom(), mrpt::poses::CPointPDFGaussian::cov, mrpt::poses::CPose3DPDFGaussian::cov, DEG2RAD, mrpt::random::CRandomGenerator::drawGaussianMultivariate(), mrpt::poses::CPoseRandomSampler::drawSample(), mrpt::poses::CPointPDFSOG::drawSingleSample(), mrpt::poses::CPointPDFSOG::end(), mrpt::obs::CSensoryFrame::end(), mrpt::poses::CPointPDFSOG::erase(), mrpt::poses::CPointPDFSOG::ESS(), mrpt::format(), mrpt::poses::CPointPDFSOG::get(), mrpt::obs::CActionCollection::getActionByClass(), mrpt::poses::CPose2DGridTemplate< T >::getAsMatrix(), mrpt::obs::CActionCollection::getBestMovementEstimation(), mrpt::poses::CPose2DGridTemplate< T >::getByIndex(), mrpt::utils::CProbabilityDensityFunction< TDATA, STATE_LEN >::getCovariance(), mrpt::poses::CPointPDFSOG::getMean(), mrpt::poses::CPoseRandomSampler::getOriginalPDFCov2D(), mrpt::random::getRandomGenerator(), mrpt::poses::CPose2DGridTemplate< T >::getSizeX(), mrpt::poses::CPose2DGridTemplate< T >::getSizeY(), mrpt::slam::CICP::TReturnInfo::goodness, mrpt::poses::CPose2DGridTemplate< T >::idx2x(), mrpt::poses::CPose2DGridTemplate< T >::idx2y(), mrpt::maps::CPointsMap::insertionOptions, mrpt::obs::CSensoryFrame::insertObservationsInto(), INVALID_BEACON_ID, IS_CLASS, mrpt::maps::CPointsMap::TInsertionOptions::isPlanarMap, mrpt::poses::CPoseRandomSampler::isPrepared(), mrpt::utils::keep_max(), mrpt::poses::CPointPDFSOG::TGaussianMode::log_w, mrpt::poses::CPointPDFGaussian::mean, mrpt::poses::CPose3DPDFGaussian::mean, mrpt::poses::CPosePDFGaussian::mean, mrpt::maps::CPointsMap::TInsertionOptions::minDistBetweenLaserPoints, MRPT_END, MRPT_START, TAuxRangeMeasInfo::nGaussiansInMap, mrpt::poses::CPoseOrPoint< DERIVEDCLASS >::norm(), mrpt::poses::CPosePDFGrid::normalize(), mrpt::poses::CPose3D::pitch(), mrpt::bayes::CParticleFilter::TParticleFilterOptions::powFactor, mrpt::poses::CPointPDFSOG::push_back(), mrpt::poses::CPointPDFSOG::resize(), mrpt::poses::CPose3D::roll(), mrpt::utils::CImage::saveToFile(), mrpt::obs::CObservationBeaconRanges::sensedData, TAuxRangeMeasInfo::sensedDistance, TAuxRangeMeasInfo::sensorLocationOnRobot, mrpt::poses::CPose3D::setFromValues(), mrpt::poses::CPoseRandomSampler::setPosePDF(), mrpt::poses::CPointPDFSOG::size(), mrpt::math::square(), THROW_EXCEPTION, mrpt::poses::CPosePDFGrid::uniformDistribution(), mrpt::poses::CPointPDFSOG::TGaussianMode::val, val, mrpt::poses::CPoseOrPoint< DERIVEDCLASS >::x(), mrpt::poses::CPoseOrPoint< DERIVEDCLASS >::y(), and mrpt::poses::CPose3D::yaw().
◆ CMultiMetricMapPDF::prediction_and_update< mrpt::slam::StandardProposal >()
| void mrpt::maps::CMultiMetricMapPDF::prediction_and_update< mrpt::slam::StandardProposal > | ( | const mrpt::obs::CActionCollection * | actions, |
| const mrpt::obs::CSensoryFrame * | sf, | ||
| const bayes::CParticleFilter::TParticleFilterOptions & | PF_options | ||
| ) |
Definition at line 960 of file CMultiMetricMapPDF_RBPF.cpp.
References MRPT_END, and MRPT_START.
◆ operator<()
| bool mrpt::maps::operator< | ( | const COccupancyGridMap2D::TPairLikelihoodIndex & | e1, |
| const COccupancyGridMap2D::TPairLikelihoodIndex & | e2 | ||
| ) |
Definition at line 772 of file COccupancyGridMap2D_common.cpp.