Detailed Description
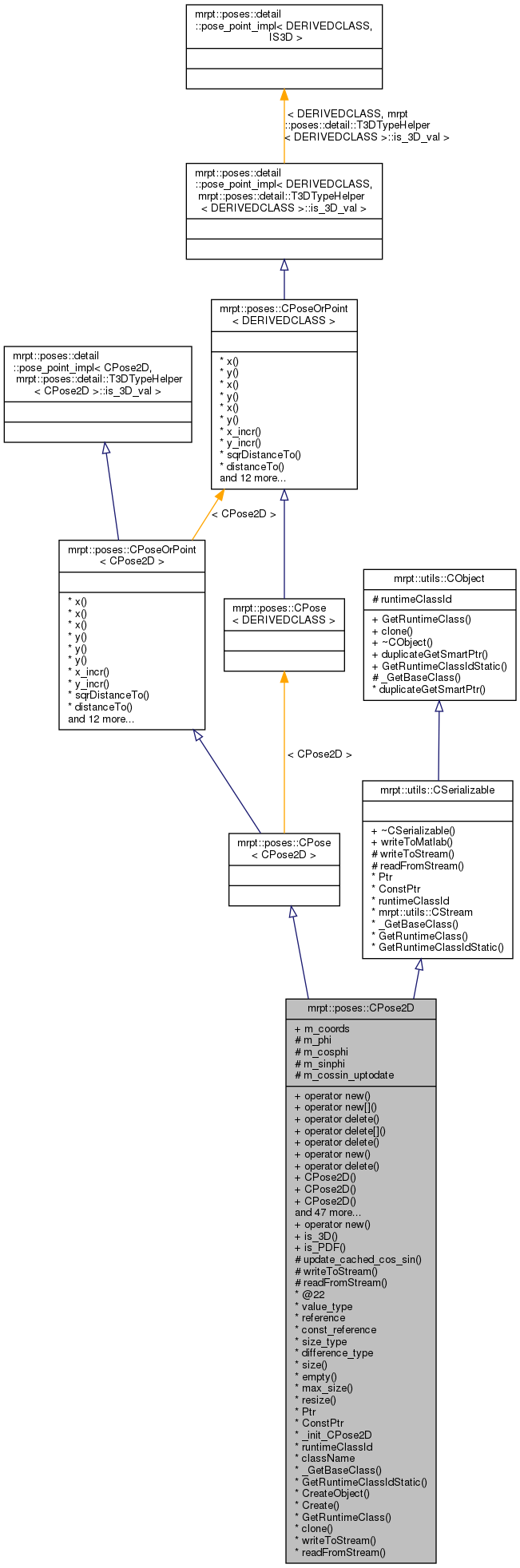
A class used to store a 2D pose, including the 2D coordinate point and a heading (phi) angle.
Use this class instead of lightweight mrpt::math::TPose2D when pose/point composition is to be called multiple times with the same pose, since this class caches calls to expensive trigronometric functions.
For a complete description of Points/Poses, see mrpt::poses::CPoseOrPoint, or refer to this documentation page
- Note
- Read also: "A tutorial on SE(3) transformation parameterizations and on-manifold optimization", Jose-Luis Blanco. http://ingmec.ual.es/~jlblanco/papers/jlblanco2010geometry3D_techrep.pdf
- See also
- CPoseOrPoint,CPoint2D
#include <mrpt/poses/CPose2D.h>
Public Types | |
| enum | { is_3D_val = 0 } |
| enum | { rotation_dimensions = 2 } |
| enum | { is_PDF_val = 0 } |
| typedef CPose2D | type_value |
| Used to emulate CPosePDF types, for example, in mrpt::graphs::CNetworkOfPoses. More... | |
Public Member Functions | |
| void * | operator new (size_t size) |
| void * | operator new[] (size_t size) |
| void | operator delete (void *ptr) noexcept |
| void | operator delete[] (void *ptr) noexcept |
| void | operator delete (void *memory, void *ptr) noexcept |
| void * | operator new (size_t size, const std::nothrow_t &) noexcept |
| void | operator delete (void *ptr, const std::nothrow_t &) noexcept |
| CPose2D () | |
| Default constructor (all coordinates to 0) More... | |
| CPose2D (const double x, const double y, const double phi) | |
| Constructor from an initial value of the pose. More... | |
| CPose2D (const CPoint2D &) | |
| Constructor from a CPoint2D object. More... | |
| CPose2D (const CPose3D &) | |
| Aproximation!! Avoid its use, since information is lost. More... | |
| CPose2D (const mrpt::math::TPose2D &) | |
| Constructor from lightweight object. More... | |
| CPose2D (const CPoint3D &) | |
| Constructor from CPoint3D with information loss. More... | |
| CPose2D (TConstructorFlags_Poses) | |
| Fast constructor that leaves all the data uninitialized - call with UNINITIALIZED_POSE as argument. More... | |
| const double & | phi () const |
| Get the phi angle of the 2D pose (in radians) More... | |
| double & | phi () |
| This is an overloaded member function, provided for convenience. It differs from the above function only in what argument(s) it accepts. More... | |
| double | phi_cos () const |
| Get a (cached) value of cos(phi), recomputing it only once when phi changes. More... | |
| double | phi_sin () const |
| Get a (cached) value of sin(phi), recomputing it only once when phi changes. More... | |
| void | phi (double angle) |
| Set the phi angle of the 2D pose (in radians) More... | |
| void | phi_incr (const double Aphi) |
| Increment the PHI angle (without checking the 2 PI range, call normalizePhi is needed) More... | |
| void | getAsVector (mrpt::math::CVectorDouble &v) const |
| Returns a 1x3 vector with [x y phi]. More... | |
| void | getAsVector (mrpt::math::CArrayDouble< 3 > &v) const |
| This is an overloaded member function, provided for convenience. It differs from the above function only in what argument(s) it accepts. More... | |
| void | getHomogeneousMatrix (mrpt::math::CMatrixDouble44 &out_HM) const |
| Returns the corresponding 4x4 homogeneous transformation matrix for the point(translation) or pose (translation+orientation). More... | |
| void | getRotationMatrix (mrpt::math::CMatrixDouble22 &R) const |
| Returns the SE(2) 2x2 rotation matrix. More... | |
| void | getRotationMatrix (mrpt::math::CMatrixDouble33 &R) const |
| Returns the equivalent SE(3) 3x3 rotation matrix, with (2,2)=1. More... | |
| mrpt::math::CMatrixDouble22 | getRotationMatrix () const |
| CPose2D | operator+ (const CPose2D &D) const |
The operator  is the pose compounding operator. More... is the pose compounding operator. More... | |
| void | composeFrom (const CPose2D &A, const CPose2D &B) |
Makes  . More... . More... | |
| CPose3D | operator+ (const CPose3D &D) const |
| The operator is the pose compounding operator. More... | |
| CPoint2D | operator+ (const CPoint2D &u) const |
The operator  is the pose/point compounding operator. More... is the pose/point compounding operator. More... | |
| void | composePoint (double lx, double ly, double &gx, double &gy) const |
An alternative, slightly more efficient way of doing  with G and L being 2D points and P this 2D pose. More... with G and L being 2D points and P this 2D pose. More... | |
| void | composePoint (const mrpt::math::TPoint2D &l, mrpt::math::TPoint2D &g) const |
| overload with G and L being 2D points and P this 2D pose More... | |
| void | composePoint (const mrpt::math::TPoint3D &l, mrpt::math::TPoint3D &g) const |
| overload with G and L being 3D points and P this 2D pose (the "z" coordinate remains unmodified) More... | |
| void | composePoint (double lx, double ly, double lz, double &gx, double &gy, double &gz) const |
| overload (the "z" coordinate remains unmodified) More... | |
| void | inverseComposePoint (const double gx, const double gy, double &lx, double &ly) const |
Computes the 2D point L such as  . More... . More... | |
| void | inverseComposePoint (const mrpt::math::TPoint2D &g, mrpt::math::TPoint2D &l) const |
| This is an overloaded member function, provided for convenience. It differs from the above function only in what argument(s) it accepts. More... | |
| CPoint3D | operator+ (const CPoint3D &u) const |
| The operator is the pose/point compounding operator. More... | |
| void | inverseComposeFrom (const CPose2D &A, const CPose2D &B) |
Makes  this method is slightly more efficient than "this= A - B;" since it avoids the temporary object. More... this method is slightly more efficient than "this= A - B;" since it avoids the temporary object. More... | |
| void | inverse () |
| Convert this pose into its inverse, saving the result in itself. More... | |
| CPose2D | operator- (const CPose2D &b) const |
Compute  More... | |
| CPose3D | operator- (const CPose3D &b) const |
The operator  is the pose inverse compounding operator. More... is the pose inverse compounding operator. More... | |
| void | AddComponents (const CPose2D &p) |
| Scalar sum of components: This is diferent from poses composition, which is implemented as "+" operators in "CPose" derived classes. More... | |
| void | operator*= (const double s) |
| Scalar multiplication. More... | |
| CPose2D & | operator+= (const CPose2D &b) |
Make  More... | |
| void | normalizePhi () |
| Forces "phi" to be in the range [-pi,pi];. More... | |
| CPose2D | getOppositeScalar () const |
| Return the opposite of the current pose instance by taking the negative of all its components individually. More... | |
| void | asString (std::string &s) const |
| Returns a human-readable textual representation of the object (eg: "[x y
yaw]", yaw in degrees) More... | |
| std::string | asString () const |
| void | fromString (const std::string &s) |
| Set the current object value from a string generated by 'asString' (eg: "[0.02 1.04 -0.8]" ) More... | |
| void | fromStringRaw (const std::string &s) |
| Same as fromString, but without requiring the square brackets in the string. More... | |
| const double & | operator[] (unsigned int i) const |
| double & | operator[] (unsigned int i) |
| void | changeCoordinatesReference (const CPose2D &p) |
| makes: this = p (+) this More... | |
| double | distance2DFrobeniusTo (const CPose2D &p) const |
| Returns the 2D distance from this pose/point to a 2D pose using the Frobenius distance. More... | |
| const type_value & | getPoseMean () const |
| type_value & | getPoseMean () |
| void | setToNaN () override |
| Set all data fields to quiet NaN. More... | |
| virtual mxArray * | writeToMatlab () const |
Introduces a pure virtual method responsible for writing to a mxArray Matlab object, typically a MATLAB struct whose contents are documented in each derived class. More... | |
RTTI classes and functions | |
| mrpt::utils::CObject::Ptr | duplicateGetSmartPtr () const |
| Returns a copy of the object, indepently of its class, as a smart pointer (the newly created object will exist as long as any copy of this smart pointer). More... | |
Static Public Member Functions | |
| static void * | operator new (size_t size, void *ptr) |
| static bool | is_3D () |
| static bool | is_PDF () |
Public Attributes | |
| mrpt::math::CArrayDouble< 2 > | m_coords |
| [x,y] More... | |
Protected Member Functions | |
| void | update_cached_cos_sin () const |
CSerializable virtual methods | |
| void | writeToStream (mrpt::utils::CStream &out, int *getVersion) const override |
| Introduces a pure virtual method responsible for writing to a CStream. More... | |
| void | readFromStream (mrpt::utils::CStream &in, int version) override |
| Introduces a pure virtual method responsible for loading from a CStream This can not be used directly be users, instead use "stream >> object;" for reading it from a stream or "stream >> object_ptr;" if the class is unknown apriori. More... | |
Protected Attributes | |
| double | m_phi |
| The orientation of the pose, in radians. More... | |
| double | m_cosphi |
| Precomputed cos() & sin() of phi. More... | |
| double | m_sinphi |
| bool | m_cossin_uptodate |
STL-like methods and typedefs | |
| enum | { static_size = 3 } |
| typedef double | value_type |
| The type of the elements. More... | |
| typedef double & | reference |
| typedef const double & | const_reference |
| typedef std::size_t | size_type |
| typedef std::ptrdiff_t | difference_type |
| static size_type | size () |
| static bool | empty () |
| static size_type | max_size () |
| static void | resize (const size_t n) |
RTTI stuff <br> | |
| using | Ptr = std::shared_ptr< CPose2D > |
| using | ConstPtr = std::shared_ptr< const CPose2D > |
| static mrpt::utils::CLASSINIT | _init_CPose2D |
| static const mrpt::utils::TRuntimeClassId | runtimeClassId |
| static constexpr const char * | className = "CPose2D" |
| static const mrpt::utils::TRuntimeClassId * | _GetBaseClass () |
| static const mrpt::utils::TRuntimeClassId & | GetRuntimeClassIdStatic () |
| static mrpt::utils::CObject * | CreateObject () |
| template<typename... Args> | |
| static Ptr | Create (Args &&... args) |
| virtual const mrpt::utils::TRuntimeClassId * | GetRuntimeClass () const override |
| Returns information about the class of an object in runtime. More... | |
| virtual mrpt::utils::CObject * | clone () const override |
| Returns a deep copy (clone) of the object, indepently of its class. More... | |
| static bool | is3DPoseOrPoint () |
| Return true for poses or points with a Z component, false otherwise. More... | |
| double | x () const |
| Common members of all points & poses classes. More... | |
| double & | x () |
| void | x (const double v) |
| double | y () const |
| double & | y () |
| void | y (const double v) |
| void | x_incr (const double v) |
| void | y_incr (const double v) |
| template<class OTHERCLASS > | |
| double | sqrDistanceTo (const CPoseOrPoint< OTHERCLASS > &b) const |
| Returns the squared euclidean distance to another pose/point: More... | |
| template<class OTHERCLASS > | |
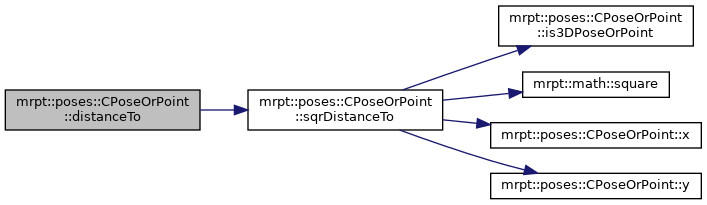
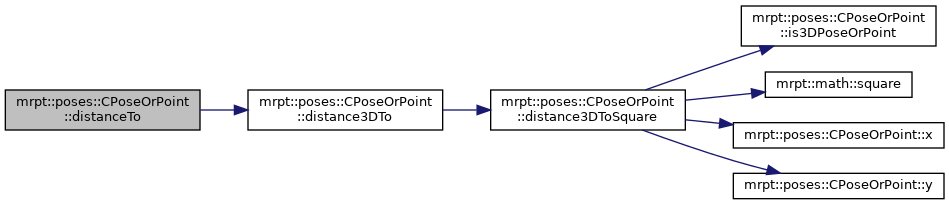
| double | distanceTo (const CPoseOrPoint< OTHERCLASS > &b) const |
| Returns the Euclidean distance to another pose/point: More... | |
| double | distanceTo (const mrpt::math::TPoint3D &b) const |
| Returns the euclidean distance to a 3D point: More... | |
| double | distance2DToSquare (double ax, double ay) const |
| Returns the squared 2D distance from this pose/point to a 2D point (ignores Z, if it exists). More... | |
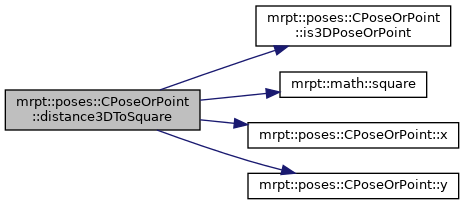
| double | distance3DToSquare (double ax, double ay, double az) const |
| Returns the squared 3D distance from this pose/point to a 3D point. More... | |
| double | distance2DTo (double ax, double ay) const |
| Returns the 2D distance from this pose/point to a 2D point (ignores Z, if it exists). More... | |
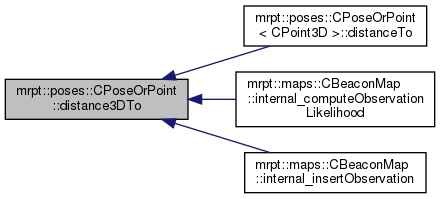
| double | distance3DTo (double ax, double ay, double az) const |
| Returns the 3D distance from this pose/point to a 3D point. More... | |
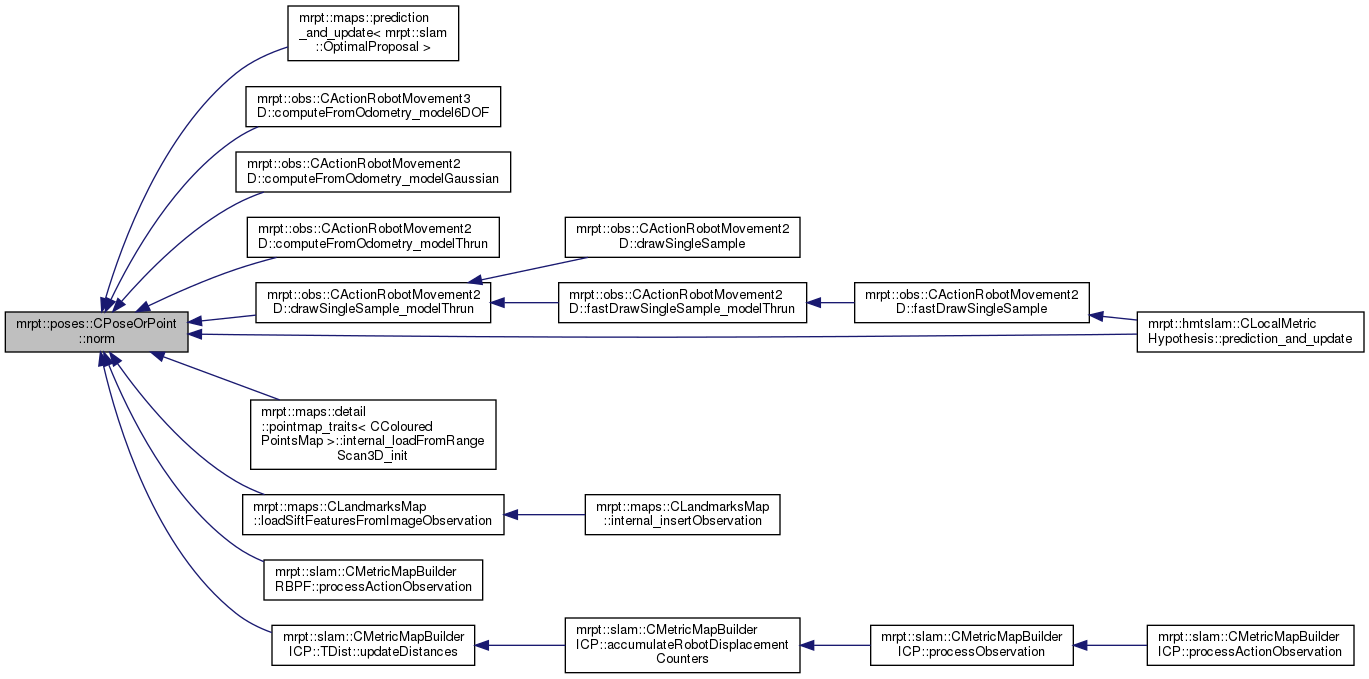
| double | norm () const |
Returns the euclidean norm of vector:  . More... . More... | |
| mrpt::math::CVectorDouble | getAsVectorVal () const |
| Return the pose or point as a 1xN vector with all the components (see derived classes for each implementation) More... | |
| mrpt::math::CMatrixDouble44 | getHomogeneousMatrixVal () const |
| Returns the corresponding 4x4 homogeneous transformation matrix for the point(translation) or pose (translation+orientation). More... | |
| void | getInverseHomogeneousMatrix (mrpt::math::CMatrixDouble44 &out_HM) const |
| Returns the corresponding 4x4 inverse homogeneous transformation matrix for this point or pose. More... | |
| mrpt::math::CMatrixDouble44 | getInverseHomogeneousMatrix () const |
| This is an overloaded member function, provided for convenience. It differs from the above function only in what argument(s) it accepts. More... | |
Member Typedef Documentation
◆ const_reference
| typedef const double& mrpt::poses::CPose2D::const_reference |
◆ ConstPtr
| using mrpt::poses::CPose2D::ConstPtr = std::shared_ptr<const CPose2D > |
◆ difference_type
◆ Ptr
| using mrpt::poses::CPose2D::Ptr = std::shared_ptr< CPose2D > |
◆ reference
| typedef double& mrpt::poses::CPose2D::reference |
◆ size_type
| typedef std::size_t mrpt::poses::CPose2D::size_type |
◆ type_value
Used to emulate CPosePDF types, for example, in mrpt::graphs::CNetworkOfPoses.
◆ value_type
| typedef double mrpt::poses::CPose2D::value_type |
Member Enumeration Documentation
◆ anonymous enum
◆ anonymous enum
◆ anonymous enum
◆ anonymous enum
Constructor & Destructor Documentation
◆ CPose2D() [1/7]
| CPose2D::CPose2D | ( | ) |
Default constructor (all coordinates to 0)
Definition at line 30 of file CPose2D.cpp.
Referenced by changeCoordinatesReference(), getOppositeScalar(), and operator+().
◆ CPose2D() [2/7]
| CPose2D::CPose2D | ( | const double | x, |
| const double | y, | ||
| const double | phi | ||
| ) |
Constructor from an initial value of the pose.
Definition at line 35 of file CPose2D.cpp.
References m_coords, normalizePhi(), mrpt::poses::CPoseOrPoint< DERIVEDCLASS >::x(), and mrpt::poses::CPoseOrPoint< DERIVEDCLASS >::y().

◆ CPose2D() [3/7]
|
explicit |
◆ CPose2D() [4/7]
|
explicit |
Aproximation!! Avoid its use, since information is lost.
Definition at line 49 of file CPose2D.cpp.
References m_coords.
◆ CPose2D() [5/7]
|
explicit |
Constructor from lightweight object.
Definition at line 311 of file CPose2D.cpp.
References m_coords, mrpt::math::TPose2D::x, and mrpt::math::TPose2D::y.
◆ CPose2D() [6/7]
|
explicit |
Constructor from CPoint3D with information loss.
Definition at line 318 of file CPose2D.cpp.
References m_coords, normalizePhi(), mrpt::poses::CPoseOrPoint< DERIVEDCLASS >::x(), and mrpt::poses::CPoseOrPoint< DERIVEDCLASS >::y().

◆ CPose2D() [7/7]
|
inline |
Member Function Documentation
◆ _GetBaseClass()
|
staticprotected |
◆ AddComponents()
Scalar sum of components: This is diferent from poses composition, which is implemented as "+" operators in "CPose" derived classes.
Definition at line 264 of file CPose2D.cpp.
References m_coords, m_cossin_uptodate, and m_phi.
◆ asString() [1/2]
|
inline |
◆ asString() [2/2]
| void CPose2D::asString | ( | std::string & | s | ) | const |
Returns a human-readable textual representation of the object (eg: "[x y yaw]", yaw in degrees)
- See also
- fromString
Definition at line 433 of file CPose2D.cpp.
References mrpt::format(), m_phi, mrpt::utils::RAD2DEG(), mrpt::poses::CPoseOrPoint< DERIVEDCLASS >::x(), and mrpt::poses::CPoseOrPoint< DERIVEDCLASS >::y().
Referenced by mrpt::slam::CMetricMapBuilderICP::processObservation(), and mrpt::nav::PlannerRRT_SE2_TPS::solve().

◆ changeCoordinatesReference()
makes: this = p (+) this
Definition at line 300 of file CPose2D.h.
References composeFrom(), and CPose2D().

◆ clone()
|
overridevirtual |
Returns a deep copy (clone) of the object, indepently of its class.
Implements mrpt::utils::CObject.
◆ composeFrom()
Makes .
- Note
- A or B can be "this" without problems.
Definition at line 124 of file CPose2D.cpp.
References m_coords, m_cosphi, m_cossin_uptodate, m_phi, m_sinphi, update_cached_cos_sin(), and mrpt::math::wrapToPi().
Referenced by changeCoordinatesReference(), mrpt::poses::CPosePDFGaussian::changeCoordinatesReference(), mrpt::poses::CPosePDFGaussianInf::changeCoordinatesReference(), operator+=(), mrpt::hmtslam::CLocalMetricHypothesis::prediction_and_update(), and mrpt::slam::CMetricMapBuilderICP::processActionObservation().

◆ composePoint() [1/4]
| void CPose2D::composePoint | ( | const mrpt::math::TPoint2D & | l, |
| mrpt::math::TPoint2D & | g | ||
| ) | const |
overload with G and L being 2D points and P this 2D pose
Definition at line 196 of file CPose2D.cpp.
References composePoint(), mrpt::math::TPoint2D::x, and mrpt::math::TPoint2D::y.

◆ composePoint() [2/4]
| void CPose2D::composePoint | ( | const mrpt::math::TPoint3D & | l, |
| mrpt::math::TPoint3D & | g | ||
| ) | const |
overload with G and L being 3D points and P this 2D pose (the "z" coordinate remains unmodified)
Definition at line 204 of file CPose2D.cpp.
References composePoint(), mrpt::math::TPoint3D::x, mrpt::math::TPoint3D::y, and mrpt::math::TPoint3D::z.

◆ composePoint() [3/4]
| void CPose2D::composePoint | ( | double | lx, |
| double | ly, | ||
| double & | gx, | ||
| double & | gy | ||
| ) | const |
An alternative, slightly more efficient way of doing with G and L being 2D points and P this 2D pose.
An alternative, slightly more efficient way of doing with G and L being 2D points and P this 2D pose.
Definition at line 188 of file CPose2D.cpp.
References m_coords, m_cosphi, m_sinphi, and update_cached_cos_sin().
Referenced by mrpt::nav::CPTG_RobotShape_Polygonal::add_robotShape_to_setOfLines(), mrpt::nav::CPTG_RobotShape_Circular::add_robotShape_to_setOfLines(), mrpt::poses::CPosePDFGaussian::composePoint(), composePoint(), mrpt::maps::COccupancyGridMap2D::computeObservationLikelihood_Consensus(), mrpt::maps::COccupancyGridMap2D::computeObservationLikelihood_ConsensusOWA(), mrpt::poses::CRobot2DPoseEstimator::extrapolateRobotPose(), ransac_data_assoc_run(), mrpt::tfest::se2_l2_robust(), mrpt::nav::CReactiveNavigationSystem::STEP3_WSpaceToTPSpace(), mrpt::nav::CReactiveNavigationSystem3D::STEP3_WSpaceToTPSpace(), and mrpt::nav::PlannerTPS_VirtualBase::transformPointcloudWithSquareClipping().


◆ composePoint() [4/4]
| void CPose2D::composePoint | ( | double | lx, |
| double | ly, | ||
| double | lz, | ||
| double & | gx, | ||
| double & | gy, | ||
| double & | gz | ||
| ) | const |
overload (the "z" coordinate remains unmodified)
Definition at line 210 of file CPose2D.cpp.
References m_coords, m_cosphi, m_sinphi, and update_cached_cos_sin().

◆ Create()
|
inlinestatic |
◆ CreateObject()
|
static |
◆ distance2DFrobeniusTo()
| double CPose2D::distance2DFrobeniusTo | ( | const CPose2D & | p | ) | const |
Returns the 2D distance from this pose/point to a 2D pose using the Frobenius distance.
Definition at line 410 of file CPose2D.cpp.
References phi(), and mrpt::math::square().
◆ distance2DTo()
|
inlineinherited |
Returns the 2D distance from this pose/point to a 2D point (ignores Z, if it exists).
Definition at line 233 of file CPoseOrPoint.h.
References mrpt::poses::CPoseOrPoint< DERIVEDCLASS >::distance2DToSquare().
Referenced by mrpt::nav::PlannerRRT_SE2_TPS::solve().


◆ distance2DToSquare()
|
inlineinherited |
Returns the squared 2D distance from this pose/point to a 2D point (ignores Z, if it exists).
Definition at line 213 of file CPoseOrPoint.h.
References mrpt::math::square(), mrpt::poses::CPoseOrPoint< DERIVEDCLASS >::x(), and mrpt::poses::CPoseOrPoint< DERIVEDCLASS >::y().
Referenced by mrpt::poses::CPoseOrPoint< DERIVEDCLASS >::distance2DTo().

◆ distance3DTo()
|
inlineinherited |
Returns the 3D distance from this pose/point to a 3D point.
Definition at line 239 of file CPoseOrPoint.h.
References mrpt::poses::CPoseOrPoint< DERIVEDCLASS >::distance3DToSquare().
Referenced by mrpt::poses::CPoseOrPoint< DERIVEDCLASS >::distanceTo(), mrpt::maps::CBeaconMap::internal_computeObservationLikelihood(), and mrpt::maps::CBeaconMap::internal_insertObservation().
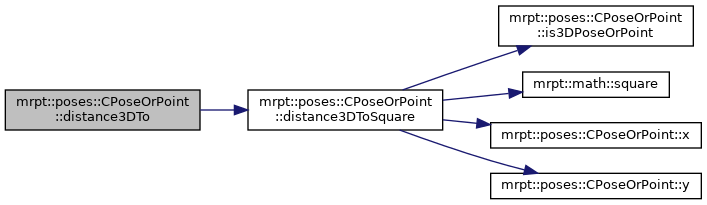
◆ distance3DToSquare()
|
inlineinherited |
Returns the squared 3D distance from this pose/point to a 3D point.
Definition at line 220 of file CPoseOrPoint.h.
References mrpt::poses::CPoseOrPoint< DERIVEDCLASS >::is3DPoseOrPoint(), mrpt::math::square(), mrpt::poses::CPoseOrPoint< DERIVEDCLASS >::x(), and mrpt::poses::CPoseOrPoint< DERIVEDCLASS >::y().
Referenced by mrpt::poses::CPoseOrPoint< DERIVEDCLASS >::distance3DTo().

◆ distanceTo() [1/2]
|
inlineinherited |
Returns the Euclidean distance to another pose/point:
Definition at line 206 of file CPoseOrPoint.h.
References mrpt::poses::CPoseOrPoint< DERIVEDCLASS >::sqrDistanceTo().
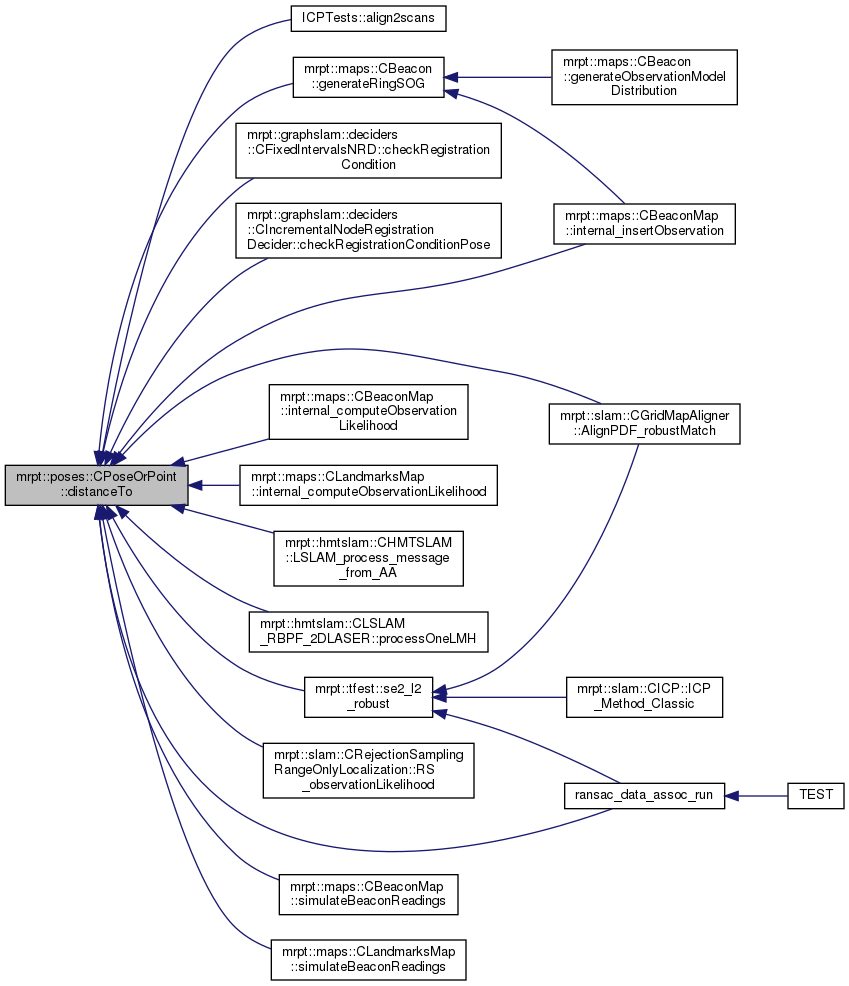
Referenced by ICPTests::align2scans(), mrpt::slam::CGridMapAligner::AlignPDF_robustMatch(), mrpt::graphslam::deciders::CFixedIntervalsNRD< GRAPH_T >::checkRegistrationCondition(), mrpt::graphslam::deciders::CIncrementalNodeRegistrationDecider< GRAPH_T >::checkRegistrationConditionPose(), mrpt::maps::CBeacon::generateRingSOG(), mrpt::maps::CBeaconMap::internal_computeObservationLikelihood(), mrpt::maps::CLandmarksMap::internal_computeObservationLikelihood(), mrpt::maps::CBeaconMap::internal_insertObservation(), mrpt::hmtslam::CHMTSLAM::LSLAM_process_message_from_AA(), mrpt::hmtslam::CLSLAM_RBPF_2DLASER::processOneLMH(), ransac_data_assoc_run(), mrpt::slam::CRejectionSamplingRangeOnlyLocalization::RS_observationLikelihood(), mrpt::tfest::se2_l2_robust(), mrpt::maps::CBeaconMap::simulateBeaconReadings(), and mrpt::maps::CLandmarksMap::simulateBeaconReadings().
◆ distanceTo() [2/2]
|
inlineinherited |
Returns the euclidean distance to a 3D point:
Definition at line 245 of file CPoseOrPoint.h.
References mrpt::poses::CPoseOrPoint< DERIVEDCLASS >::distance3DTo().
◆ empty()
◆ fromString()
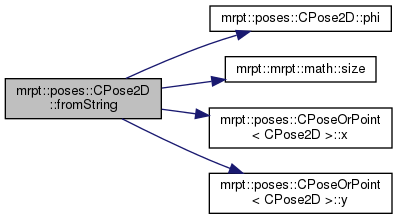
| void CPose2D::fromString | ( | const std::string & | s | ) |
Set the current object value from a string generated by 'asString' (eg: "[0.02 1.04 -0.8]" )
- See also
- asString
- Exceptions
-
std::exception On invalid format
Definition at line 392 of file CPose2D.cpp.
References ASSERTMSG_, DEG2RAD, phi(), mrpt::math::size(), THROW_EXCEPTION, mrpt::poses::CPoseOrPoint< DERIVEDCLASS >::x(), and mrpt::poses::CPoseOrPoint< DERIVEDCLASS >::y().
Referenced by fromStringRaw().

◆ fromStringRaw()
| void CPose2D::fromStringRaw | ( | const std::string & | s | ) |
Same as fromString, but without requiring the square brackets in the string.
Definition at line 405 of file CPose2D.cpp.
References fromString().

◆ getAsVector() [1/2]
| void CPose2D::getAsVector | ( | mrpt::math::CArrayDouble< 3 > & | v | ) | const |
This is an overloaded member function, provided for convenience. It differs from the above function only in what argument(s) it accepts.
Definition at line 360 of file CPose2D.cpp.
◆ getAsVector() [2/2]
| void CPose2D::getAsVector | ( | mrpt::math::CVectorDouble & | v | ) | const |
Returns a 1x3 vector with [x y phi].
Definition at line 352 of file CPose2D.cpp.
◆ getAsVectorVal()
|
inlineinherited |
Return the pose or point as a 1xN vector with all the components (see derived classes for each implementation)
Definition at line 265 of file CPoseOrPoint.h.
Referenced by mrpt::maps::COccupancyGridMap2D::laserScanSimulatorWithUncertainty(), Pose3DTests::test_compose(), Pose3DQuatTests::test_compose(), Pose3DRotVecTests::test_compose(), Pose3DTests::test_composeFrom(), Pose3DTests::test_composePoint(), Pose3DQuatTests::test_composePoint(), Pose3DRotVecTests::test_conversions(), Pose3DTests::test_ExpLnEqual(), TEST_F(), Pose3DQuatTests::test_fromYPRAndBack(), Pose3DQuatTests::test_invComposePoint(), Pose3DTests::test_inverse(), Pose3DPDFGaussTests::testChangeCoordsRef(), Pose3DQuatPDFGaussTests::testChangeCoordsRef(), Pose3DPDFGaussTests::testPoseComposition(), Pose3DPDFGaussTests::testPoseInverse(), Pose3DPDFGaussTests::testPoseInverseComposition(), and Pose3DPDFGaussTests::testToQuatPDFAndBack().

◆ getHomogeneousMatrix()
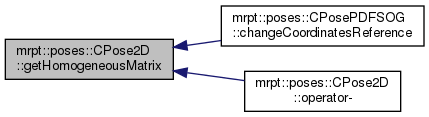
| void CPose2D::getHomogeneousMatrix | ( | mrpt::math::CMatrixDouble44 & | out_HM | ) | const |
Returns the corresponding 4x4 homogeneous transformation matrix for the point(translation) or pose (translation+orientation).
- See also
- getInverseHomogeneousMatrix
Definition at line 288 of file CPose2D.cpp.
References m_coords, m_cosphi, m_sinphi, and update_cached_cos_sin().
Referenced by mrpt::poses::CPosePDFSOG::changeCoordinatesReference(), and operator-().

◆ getHomogeneousMatrixVal()
|
inlineinherited |
Returns the corresponding 4x4 homogeneous transformation matrix for the point(translation) or pose (translation+orientation).
- See also
- getInverseHomogeneousMatrix
Definition at line 276 of file CPoseOrPoint.h.
References mrpt::math::UNINITIALIZED_MATRIX.
Referenced by mrpt::obs::CObservationStereoImages::getDescriptionAsText(), mrpt::obs::CObservationStereoImagesFeatures::getDescriptionAsText(), Pose3DQuatTests::test_copy(), Pose3DQuatTests::test_fromYPRAndBack(), and Pose3DQuatTests::test_unaryInverse().
◆ getInverseHomogeneousMatrix() [1/2]
|
inlineinherited |
This is an overloaded member function, provided for convenience. It differs from the above function only in what argument(s) it accepts.
Definition at line 295 of file CPoseOrPoint.h.
References mrpt::math::UNINITIALIZED_MATRIX.
◆ getInverseHomogeneousMatrix() [2/2]
|
inlineinherited |
Returns the corresponding 4x4 inverse homogeneous transformation matrix for this point or pose.
- See also
- getHomogeneousMatrix
Definition at line 287 of file CPoseOrPoint.h.
References mrpt::math::homogeneousMatrixInverse().
Referenced by mrpt::poses::CPose3DRotVec::inverseComposeFrom(), and Pose3DTests::test_inverse().


◆ getOppositeScalar()
| CPose2D CPose2D::getOppositeScalar | ( | ) | const |
Return the opposite of the current pose instance by taking the negative of all its components individually.
Definition at line 428 of file CPose2D.cpp.
References CPose2D(), m_coords, and m_phi.

◆ getPoseMean() [1/2]
|
inline |
◆ getPoseMean() [2/2]
|
inline |
◆ getRotationMatrix() [1/3]
|
inline |
Definition at line 145 of file CPose2D.h.
References R, and mrpt::math::UNINITIALIZED_MATRIX.
◆ getRotationMatrix() [2/3]
| void CPose2D::getRotationMatrix | ( | mrpt::math::CMatrixDouble22 & | R | ) | const |
Returns the SE(2) 2x2 rotation matrix.
Definition at line 143 of file CPose2D.cpp.
References m_cosphi, m_sinphi, R, and update_cached_cos_sin().

◆ getRotationMatrix() [3/3]
| void CPose2D::getRotationMatrix | ( | mrpt::math::CMatrixDouble33 & | R | ) | const |
Returns the equivalent SE(3) 3x3 rotation matrix, with (2,2)=1.
Definition at line 152 of file CPose2D.cpp.
References m_cosphi, m_sinphi, R, and update_cached_cos_sin().

◆ GetRuntimeClass()
|
overridevirtual |
Returns information about the class of an object in runtime.
Reimplemented from mrpt::utils::CSerializable.
◆ GetRuntimeClassIdStatic()
|
static |
◆ inverse()
| void CPose2D::inverse | ( | ) |
Convert this pose into its inverse, saving the result in itself.
- See also
- operator-
Definition at line 337 of file CPose2D.cpp.
References m_coords, m_cosphi, m_cossin_uptodate, m_phi, m_sinphi, and update_cached_cos_sin().
Referenced by mrpt::poses::operator-().


◆ inverseComposeFrom()
Makes this method is slightly more efficient than "this= A - B;" since it avoids the temporary object.
- Note
- A or B can be "this" without problems.
- See also
- composeFrom, composePoint
Definition at line 247 of file CPose2D.cpp.
References m_coords, m_cosphi, m_cossin_uptodate, m_phi, m_sinphi, update_cached_cos_sin(), and mrpt::math::wrapToPi().
Referenced by mrpt::nav::PoseDistanceMetric< TNodeSE2_TP >::distance(), and operator-().

◆ inverseComposePoint() [1/2]
| void CPose2D::inverseComposePoint | ( | const double | gx, |
| const double | gy, | ||
| double & | lx, | ||
| double & | ly | ||
| ) | const |
Computes the 2D point L such as .
- See also
- composePoint, composeFrom
Definition at line 219 of file CPose2D.cpp.
References m_coords, m_cosphi, m_sinphi, and update_cached_cos_sin().
Referenced by inverseComposePoint(), and mrpt::nav::CWaypointsNavigator::waypoints_navigationStep().


◆ inverseComposePoint() [2/2]
|
inline |
This is an overloaded member function, provided for convenience. It differs from the above function only in what argument(s) it accepts.
Definition at line 191 of file CPose2D.h.
References inverseComposePoint(), mrpt::math::TPoint2D::x, and mrpt::math::TPoint2D::y.

◆ is3DPoseOrPoint()
|
inlinestaticinherited |
Return true for poses or points with a Z component, false otherwise.
Definition at line 172 of file CPoseOrPoint.h.
Referenced by mrpt::poses::CPoseOrPoint< DERIVEDCLASS >::distance3DToSquare(), mrpt::poses::CPoseOrPoint< DERIVEDCLASS >::norm(), and mrpt::poses::CPoseOrPoint< DERIVEDCLASS >::sqrDistanceTo().
◆ is_3D()
|
inlinestatic |
◆ is_PDF()
|
inlinestatic |
Definition at line 325 of file CPose2D.h.
References is_PDF_val.
◆ max_size()
|
inlinestatic |
Definition at line 346 of file CPose2D.h.
References static_size.
◆ norm()
|
inlineinherited |
Returns the euclidean norm of vector: .
Definition at line 252 of file CPoseOrPoint.h.
References mrpt::poses::CPoseOrPoint< DERIVEDCLASS >::is3DPoseOrPoint(), mrpt::math::square(), mrpt::poses::CPoseOrPoint< DERIVEDCLASS >::x(), and mrpt::poses::CPoseOrPoint< DERIVEDCLASS >::y().
Referenced by mrpt::maps::CMultiMetricMapPDF::prediction_and_update< mrpt::slam::OptimalProposal >(), mrpt::obs::CActionRobotMovement3D::computeFromOdometry_model6DOF(), mrpt::obs::CActionRobotMovement2D::computeFromOdometry_modelGaussian(), mrpt::obs::CActionRobotMovement2D::computeFromOdometry_modelThrun(), mrpt::obs::CActionRobotMovement2D::drawSingleSample_modelThrun(), mrpt::maps::detail::pointmap_traits< CColouredPointsMap >::internal_loadFromRangeScan3D_init(), mrpt::maps::CLandmarksMap::loadSiftFeaturesFromImageObservation(), mrpt::hmtslam::CLocalMetricHypothesis::prediction_and_update(), mrpt::slam::CMetricMapBuilderRBPF::processActionObservation(), and mrpt::slam::CMetricMapBuilderICP::TDist::updateDistances().
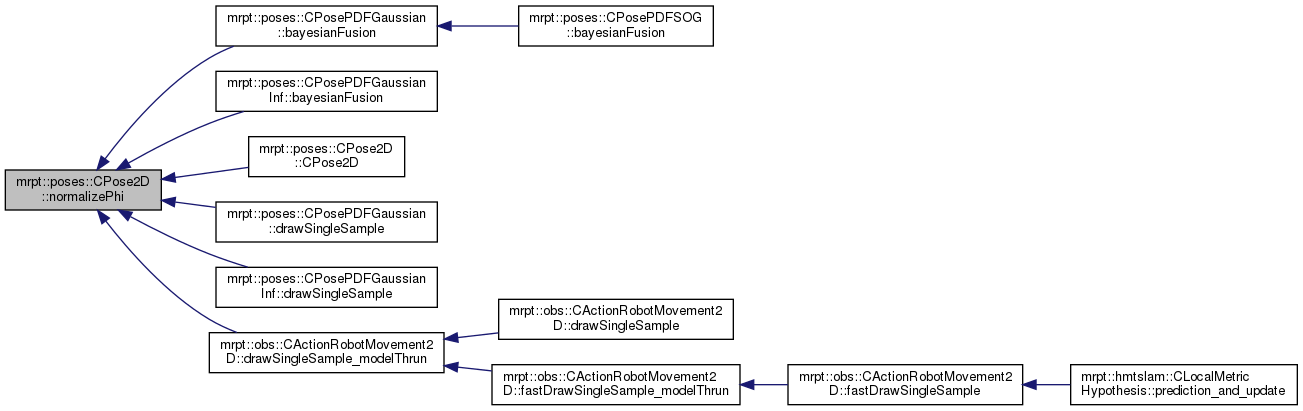
◆ normalizePhi()
| void CPose2D::normalizePhi | ( | ) |
Forces "phi" to be in the range [-pi,pi];.
Definition at line 305 of file CPose2D.cpp.
References m_cossin_uptodate, m_phi, and mrpt::math::wrapToPi().
Referenced by mrpt::poses::CPosePDFGaussian::bayesianFusion(), mrpt::poses::CPosePDFGaussianInf::bayesianFusion(), CPose2D(), mrpt::poses::CPosePDFGaussian::drawSingleSample(), mrpt::poses::CPosePDFGaussianInf::drawSingleSample(), and mrpt::obs::CActionRobotMovement2D::drawSingleSample_modelThrun().

◆ operator delete() [1/3]
◆ operator delete() [2/3]
◆ operator delete() [3/3]
◆ operator delete[]()
◆ operator new() [1/3]
|
inline |
◆ operator new() [2/3]
|
inlinenoexcept |
◆ operator new() [3/3]
◆ operator new[]()
|
inline |
◆ operator*=()
| void CPose2D::operator*= | ( | const double | s | ) |
Scalar multiplication.
Definition at line 275 of file CPose2D.cpp.
References m_coords, m_cossin_uptodate, and m_phi.
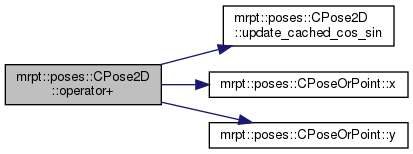
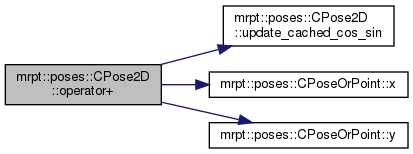
◆ operator+() [1/4]
The operator is the pose/point compounding operator.
Definition at line 177 of file CPose2D.cpp.
References m_coords, m_cosphi, m_sinphi, update_cached_cos_sin(), mrpt::poses::CPoseOrPoint< DERIVEDCLASS >::x(), and mrpt::poses::CPoseOrPoint< DERIVEDCLASS >::y().
◆ operator+() [2/4]
The operator is the pose/point compounding operator.
Definition at line 234 of file CPose2D.cpp.
References m_coords, m_cosphi, m_sinphi, update_cached_cos_sin(), mrpt::poses::CPoseOrPoint< DERIVEDCLASS >::x(), and mrpt::poses::CPoseOrPoint< DERIVEDCLASS >::y().
◆ operator+() [3/4]
The operator is the pose compounding operator.
Definition at line 111 of file CPose2D.cpp.
References CPose2D(), m_coords, m_cosphi, m_phi, m_sinphi, and update_cached_cos_sin().

◆ operator+() [4/4]
The operator is the pose compounding operator.
Definition at line 169 of file CPose2D.cpp.
◆ operator+=()
Make
Definition at line 386 of file CPose2D.cpp.
References composeFrom().

◆ operator-() [1/2]
Compute
Definition at line 213 of file CPose2D.h.
References inverseComposeFrom(), and mrpt::poses::UNINITIALIZED_POSE.

◆ operator-() [2/2]
The operator is the pose inverse compounding operator.
Definition at line 417 of file CPose2D.cpp.
References getHomogeneousMatrix(), and mrpt::math::UNINITIALIZED_MATRIX.

◆ operator[]() [1/2]
|
inline |
◆ operator[]() [2/2]
|
inline |
◆ phi() [1/3]
|
inline |
This is an overloaded member function, provided for convenience. It differs from the above function only in what argument(s) it accepts.
Definition at line 93 of file CPose2D.h.
References m_cossin_uptodate, and m_phi.
◆ phi() [2/3]
|
inline |
Get the phi angle of the 2D pose (in radians)
Definition at line 91 of file CPose2D.h.
References m_phi.
Referenced by mrpt::graphslam::CGraphSlamEngine< GRAPH_T >::accumulateAngleDiffs(), mrpt::slam::CGridMapAligner::AlignPDF_robustMatch(), mrpt::graphs::detail::graph_ops< graph_t >::auxEuclid2Dist(), mrpt::poses::CPosePDFGaussian::bayesianFusion(), mrpt::poses::CPosePDFGaussianInf::bayesianFusion(), mrpt::poses::CPosePDFGaussian::changeCoordinatesReference(), mrpt::poses::CPosePDFGaussianInf::changeCoordinatesReference(), mrpt::graphslam::deciders::CFixedIntervalsNRD< GRAPH_T >::checkRegistrationCondition(), mrpt::graphslam::deciders::CIncrementalNodeRegistrationDecider< GRAPH_T >::checkRegistrationConditionPose(), mrpt::obs::CActionRobotMovement2D::computeFromOdometry_modelGaussian(), mrpt::obs::CActionRobotMovement2D::computeFromOdometry_modelThrun(), mrpt::maps::COccupancyGridMap2D::computeLikelihoodField_Thrun(), mrpt::poses::CPosePDFParticles::copyFrom(), mrpt::maps::CPointsMap::determineMatching2D(), distance2DFrobeniusTo(), mrpt::poses::CPoseRandomSampler::do_sample_2D(), mrpt::poses::CPosePDFGaussian::drawManySamples(), mrpt::poses::CPosePDFGaussianInf::drawManySamples(), mrpt::poses::CPosePDFGaussian::drawSingleSample(), mrpt::poses::CPosePDFGaussianInf::drawSingleSample(), mrpt::obs::CActionRobotMovement2D::drawSingleSample_modelThrun(), mrpt::poses::SE_traits< 2 >::exp(), mrpt::obs::CActionRobotMovement2D::fastDrawSingleSample_modelGaussian(), fromString(), func_laserSimul_callback(), mrpt::math::TLine2D::getAsPose2D(), mrpt::math::TLine2D::getAsPose2DForcingOrigin(), mrpt::poses::CRobot2DPoseEstimator::getLatestRobotPose(), mrpt::slam::CICP::ICP_Method_Classic(), mrpt::slam::CICP::ICP_Method_LM(), mrpt::maps::COccupancyGridMap2D::internal_insertObservation(), mrpt::poses::CPosePDFGaussian::inverse(), mrpt::poses::CPosePDFGaussianInf::inverse(), mrpt::poses::CPosePDFGaussian::inverseComposition(), mrpt::maps::COccupancyGridMap2D::laserScanSimulator(), mrpt::poses::SE_traits< 2 >::ln(), mrpt::hmtslam::CLSLAM_RBPF_2DLASER::loadTPathBinFromPath(), mrpt::poses::CPosePDFSOG::mergeModes(), mrpt::slam::CRangeBearingKFSLAM2D::OnGetAction(), mrpt::slam::CRangeBearingKFSLAM2D::OnObservationModel(), mrpt::slam::CRangeBearingKFSLAM2D::OnTransitionModel(), mrpt::poses::operator!=(), mrpt::poses::CPosePDFGaussian::operator+=(), mrpt::poses::CPosePDFGaussianInf::operator+=(), mrpt::poses::CPosePDFSOG::operator+=(), mrpt::poses::operator==(), mrpt::opengl::CSetOfObjects::posePDF2opengl(), mrpt::detectors::CDetectorDoorCrossing::process(), mrpt::math::project2D(), ransac_data_assoc_run(), readFromStream(), mrpt::slam::CRejectionSamplingRangeOnlyLocalization::RS_drawFromProposal(), mrpt::poses::CPosePDFGaussian::saveToTextFile(), mrpt::poses::CPosePDFGaussianInf::saveToTextFile(), mrpt::tfest::se2_l2_robust(), mrpt::nav::PlannerRRT_SE2_TPS::solve(), mrpt::maps::COccupancyGridMap2D::sonarSimulator(), Pose3DTests::test_to_from_2d(), mrpt::slam::CMetricMapBuilderICP::TDist::updateDistances(), mrpt::graphs::detail::graph_ops< graph_t >::write_EDGE_line(), and mrpt::poses::CPosePDFGaussianInf::writeToStream().
◆ phi() [3/3]
|
inline |
Set the phi angle of the 2D pose (in radians)
Definition at line 115 of file CPose2D.h.
References m_cossin_uptodate, and m_phi.
◆ phi_cos()
|
inline |
Get a (cached) value of cos(phi), recomputing it only once when phi changes.
Definition at line 101 of file CPose2D.h.
References m_cosphi, and update_cached_cos_sin().
Referenced by mrpt::poses::operator+().


◆ phi_incr()
|
inline |
Increment the PHI angle (without checking the 2 PI range, call normalizePhi is needed)
Definition at line 123 of file CPose2D.h.
References m_cossin_uptodate, and m_phi.
◆ phi_sin()
|
inline |
Get a (cached) value of sin(phi), recomputing it only once when phi changes.
Definition at line 108 of file CPose2D.h.
References m_sinphi, and update_cached_cos_sin().
Referenced by mrpt::poses::operator+().


◆ readFromStream()
|
overrideprotectedvirtual |
Introduces a pure virtual method responsible for loading from a CStream This can not be used directly be users, instead use "stream >> object;" for reading it from a stream or "stream >> object_ptr;" if the class is unknown apriori.
- Parameters
-
in The input binary stream where the object data must read from. version The version of the object stored in the stream: use this version number in your code to know how to read the incoming data.
- Exceptions
-
std::exception On any error, see CStream::ReadBuffer
- See also
- CStream
Implements mrpt::utils::CSerializable.
Definition at line 74 of file CPose2D.cpp.
References m_coords, m_cossin_uptodate, m_phi, MRPT_THROW_UNKNOWN_SERIALIZATION_VERSION, and phi().

◆ resize()
|
inlinestatic |
Definition at line 347 of file CPose2D.h.
References mrpt::format(), and static_size.

◆ setToNaN()
|
overridevirtual |
Set all data fields to quiet NaN.
Implements mrpt::poses::CPoseOrPoint< DERIVEDCLASS >.
Definition at line 438 of file CPose2D.cpp.
◆ size()
|
inlinestatic |
Definition at line 344 of file CPose2D.h.
References static_size.
Referenced by mrpt::slam::CRangeBearingKFSLAM2D::OnObservationModel().

◆ sqrDistanceTo()
|
inlineinherited |
Returns the squared euclidean distance to another pose/point:
Definition at line 179 of file CPoseOrPoint.h.
References mrpt::poses::CPoseOrPoint< DERIVEDCLASS >::is3DPoseOrPoint(), mrpt::math::square(), mrpt::poses::CPoseOrPoint< DERIVEDCLASS >::x(), and mrpt::poses::CPoseOrPoint< DERIVEDCLASS >::y().
Referenced by mrpt::poses::CPoseOrPoint< DERIVEDCLASS >::distanceTo().

◆ update_cached_cos_sin()
|
inlineprotected |
Definition at line 56 of file CPose2D.h.
References m_cosphi, m_cossin_uptodate, m_phi, and m_sinphi.
Referenced by composeFrom(), composePoint(), getHomogeneousMatrix(), getRotationMatrix(), inverse(), inverseComposeFrom(), inverseComposePoint(), operator+(), phi_cos(), and phi_sin().

◆ writeToMatlab()
|
inlinevirtualinherited |
Introduces a pure virtual method responsible for writing to a mxArray Matlab object, typically a MATLAB struct whose contents are documented in each derived class.
- Returns
- A new
mxArray(caller is responsible of memory freeing) or nullptr is class does not support conversion to MATLAB.
Definition at line 89 of file CSerializable.h.
◆ writeToStream()
|
overrideprotectedvirtual |
Introduces a pure virtual method responsible for writing to a CStream.
This can not be used directly be users, instead use "stream << object;" for writing it to a stream.
- Parameters
-
out The output binary stream where object must be dumped. getVersion If nullptr, the object must be dumped. If not, only the version of the object dump must be returned in this pointer. This enables the versioning of objects dumping and backward compatibility with previously stored data.
- Exceptions
-
std::exception On any error, see CStream::WriteBuffer
- See also
- CStream
Implements mrpt::utils::CSerializable.
Definition at line 59 of file CPose2D.cpp.
◆ x() [1/3]
|
inlineinherited |
Definition at line 144 of file CPoseOrPoint.h.
◆ x() [2/3]
|
inlineinherited |
Common members of all points & poses classes.
< Get X coord.
Definition at line 135 of file CPoseOrPoint.h.
Referenced by mrpt::nav::CPTG_RobotShape_Circular::add_robotShape_to_setOfLines(), mrpt::slam::CGridMapAligner::AlignPDF_robustMatch(), asString(), mrpt::graphs::detail::graph_ops< graph_t >::auxEuclid2Dist(), mrpt::poses::CPoint2DPDFGaussian::bayesianFusion(), mrpt::poses::CPointPDFSOG::bayesianFusion(), mrpt::poses::CPointPDFGaussian::bayesianFusion(), mrpt::poses::CPosePDFGaussian::bayesianFusion(), mrpt::poses::CPosePDFGaussianInf::bayesianFusion(), mrpt::maps::CMultiMetricMapPDF::prediction_and_update< mrpt::slam::OptimalProposal >(), mrpt::maps::CColouredPointsMap::colourFromObservation(), mrpt::obs::CActionRobotMovement3D::computeFromOdometry_model6DOF(), mrpt::obs::CActionRobotMovement2D::computeFromOdometry_modelThrun(), mrpt::maps::COccupancyGridMap2D::computeLikelihoodField_Thrun(), mrpt::maps::CBeaconMap::computeMatchingWith3DLandmarks(), mrpt::maps::CLandmarksMap::computeMatchingWith3DLandmarks(), mrpt::vision::computeMsd(), mrpt::maps::COccupancyGridMap2D::computeObservationLikelihood_CellsDifference(), mrpt::poses::CPose3DQuatPDFGaussian::copyFrom(), mrpt::poses::CPose3DPDFGaussian::copyFrom(), mrpt::poses::CPosePDFParticles::copyFrom(), mrpt::poses::CPoint2D::CPoint2D(), mrpt::poses::CPoint3D::CPoint3D(), CPose2D(), mrpt::poses::CPose3DQuat::CPose3DQuat(), mrpt::poses::CPose3DRotVec::CPose3DRotVec(), mrpt::hwdrivers::CIbeoLuxETH::dataCollection(), mrpt::maps::CPointsMap::determineMatching2D(), mrpt::nav::PoseDistanceMetric< TNodeSE2_TP >::distance(), mrpt::poses::CPoseOrPoint< DERIVEDCLASS >::distance2DToSquare(), mrpt::poses::CPoseOrPoint< DERIVEDCLASS >::distance3DToSquare(), mrpt::poses::CPoseRandomSampler::do_sample_2D(), mrpt::poses::CPoseRandomSampler::do_sample_3D(), mrpt::graphs::detail::CVisualizer< CPOSE, MAPS_IMPLEMENTATION, NODE_ANNOTATIONS, EDGE_ANNOTATIONS >::drawEdgeRelPoses(), mrpt::graphs::detail::CMRVisualizer< CPOSE, MAPS_IMPLEMENTATION, TMRSlamNodeAnnotations, EDGE_ANNOTATIONS >::drawEdges(), mrpt::graphs::detail::CVisualizer< CPOSE, MAPS_IMPLEMENTATION, NODE_ANNOTATIONS, EDGE_ANNOTATIONS >::drawEdges(), mrpt::poses::CPose3DPDFGaussian::drawManySamples(), mrpt::poses::CPose3DPDFGaussianInf::drawManySamples(), mrpt::poses::CPosePDFGaussian::drawManySamples(), mrpt::poses::CPosePDFGaussianInf::drawManySamples(), mrpt::poses::CPoint2DPDFGaussian::drawSingleSample(), mrpt::poses::CPointPDFGaussian::drawSingleSample(), mrpt::poses::CPointPDFSOG::drawSingleSample(), mrpt::poses::CPosePDFGaussian::drawSingleSample(), mrpt::poses::CPosePDFGaussianInf::drawSingleSample(), mrpt::poses::CPose3DPDFGaussian::drawSingleSample(), mrpt::poses::CPose3DPDFGaussianInf::drawSingleSample(), mrpt::obs::CActionRobotMovement2D::drawSingleSample_modelThrun(), mrpt::hmtslam::CHierarchicalMapMHPartition::dumpAsText(), mrpt::poses::SE_traits< 2 >::exp(), mrpt::poses::CPose3D::exp(), mrpt::obs::CActionRobotMovement2D::fastDrawSingleSample_modelGaussian(), mrpt::vision::frameJac(), fromString(), Pose3DTests::func_inv_compose_point(), Pose3DQuatTests::func_inv_compose_point(), func_laserSimul_callback(), mrpt::maps::CBeacon::generateObservationModelDistribution(), mrpt::maps::CBeacon::generateRingSOG(), mrpt::maps::CBeacon::getAs3DObject(), mrpt::slam::CRangeBearingKFSLAM::getAs3DObject(), mrpt::slam::CRangeBearingKFSLAM2D::getAs3DObject(), mrpt::hmtslam::CHierarchicalMapMHPartition::getAs3DScene(), mrpt::hmtslam::CLocalMetricHypothesis::getAs3DScene(), mrpt::slam::CIncrementalMapPartitioner::getAs3DScene(), mrpt::maps::CBeacon::getAsMatlabDrawCommands(), mrpt::math::TLine2D::getAsPose2D(), mrpt::poses::CPoint< DERIVEDCLASS >::getHomogeneousMatrix(), mrpt::poses::CRobot2DPoseEstimator::getLatestRobotPose(), mrpt::hwdrivers::CImageGrabber_FlyCapture2::getObservation(), mrpt::maps::CLandmark::getPose(), mrpt::opengl::CRenderizable::getPoseX(), mrpt::opengl::graph_tools::graph_visualize(), mrpt::slam::CICP::ICP3D_Method_Classic(), mrpt::slam::CICP::ICP_Method_Classic(), mrpt::slam::CICP::ICP_Method_LM(), mrpt::maps::COctoMapBase< OCTREE, OCTREE_NODE >::internal_build_PointCloud_for_observation(), mrpt::maps::CBeaconMap::internal_computeObservationLikelihood(), mrpt::maps::CReflectivityGridMap2D::internal_computeObservationLikelihood(), mrpt::maps::CLandmarksMap::internal_computeObservationLikelihood(), mrpt::maps::CColouredOctoMap::internal_insertObservation(), mrpt::maps::CBeaconMap::internal_insertObservation(), mrpt::maps::CGasConcentrationGridMap2D::internal_insertObservation(), mrpt::maps::COccupancyGridMap2D::internal_insertObservation(), mrpt::maps::CReflectivityGridMap2D::internal_insertObservation(), mrpt::maps::CWirelessPowerGridMap2D::internal_insertObservation(), mrpt::poses::CPose3DQuatPDFGaussian::inverse(), mrpt::poses::CPose3DQuatPDFGaussianInf::inverse(), mrpt::poses::CPosePDFGaussian::inverse(), mrpt::poses::CPosePDFGaussianInf::inverse(), mrpt::poses::CPosePDFGaussian::inverseComposition(), jacob_dA_eps_D_p_deps(), mrpt::poses::CPosePDF::jacobiansPoseComposition(), mrpt::poses::CPose3DQuatPDF::jacobiansPoseComposition(), mrpt::slam::KLF_loadBinFromParticle(), mrpt::maps::COccupancyGridMap2D::laserScanSimulator(), mrpt::poses::SE_traits< 2 >::ln(), mrpt::maps::CLandmarksMap::loadSiftFeaturesFromStereoImageObservation(), mrpt::hmtslam::CLSLAM_RBPF_2DLASER::loadTPathBinFromPath(), mrpt::hmtslam::CHMTSLAM::LSLAM_process_message_from_AA(), mrpt::poses::CPoint2DPDFGaussian::mahalanobisDistanceTo(), mrpt::poses::CPointPDFGaussian::mahalanobisDistanceTo(), mrpt::poses::CPoint2DPDFGaussian::mahalanobisDistanceToPoint(), mrpt::poses::CPosePDFSOG::mergeModes(), mrpt::poses::CPoseOrPoint< DERIVEDCLASS >::norm(), mrpt::slam::CRangeBearingKFSLAM2D::OnGetAction(), mrpt::slam::CRangeBearingKFSLAM2D::OnObservationModel(), mrpt::slam::CRangeBearingKFSLAM2D::OnTransitionModel(), mrpt::poses::operator!=(), operator+(), mrpt::poses::operator+(), mrpt::poses::operator==(), mrpt::topography::path_from_rtk_gps(), mrpt::opengl::CSetOfObjects::posePDF2opengl(), mrpt::hwdrivers::CSkeletonTracker::processPreviewNone(), mrpt::poses::CPoint2DPDFGaussian::productIntegralWith(), mrpt::poses::CPointPDFGaussian::productIntegralWith(), mrpt::poses::CPointPDFGaussian::productIntegralWith2D(), mrpt::math::project2D(), mrpt::vision::projectMatchedFeatures(), ransac_data_assoc_run(), mrpt::opengl::CRenderizable::readFromStreamRender(), mrpt::opengl::COpenGLViewport::render(), mrpt::opengl::CPlanarLaserScan::render_dl(), mrpt::slam::CRejectionSamplingRangeOnlyLocalization::RS_drawFromProposal(), mrpt::slam::CRangeBearingKFSLAM2D::saveMapAndPath2DRepresentationAsMATLABFile(), mrpt::poses::CPoint2DPDFGaussian::saveToTextFile(), mrpt::poses::CPointPDFGaussian::saveToTextFile(), mrpt::poses::CPose3DPDFGaussian::saveToTextFile(), mrpt::poses::CPose3DPDFGaussianInf::saveToTextFile(), mrpt::poses::CPose3DQuatPDFGaussian::saveToTextFile(), mrpt::poses::CPose3DQuatPDFGaussianInf::saveToTextFile(), mrpt::poses::CPosePDFGaussian::saveToTextFile(), mrpt::poses::CPosePDFGaussianInf::saveToTextFile(), se3_l2_internal(), mrpt::tfest::se3_l2_robust(), mrpt::opengl::CRenderizable::setLocation(), mrpt::opengl::CRenderizable::setPose(), mrpt::maps::CLandmark::setPose(), mrpt::poses::CPose3D::setYawPitchRoll(), mrpt::math::slerp(), mrpt::nav::PlannerRRT_SE2_TPS::solve(), mrpt::maps::COccupancyGridMap2D::sonarSimulator(), mrpt::poses::CPoseOrPoint< DERIVEDCLASS >::sqrDistanceTo(), mrpt::vision::StereoObs2BRObs(), Pose3DTests::test_composePoint(), Pose3DTests::test_to_from_2d(), mrpt::opengl::CDisk::traceRay(), mrpt::opengl::CSphere::traceRay(), mrpt::nav::PlannerTPS_VirtualBase::transformPointcloudWithSquareClipping(), mrpt::graphs::detail::graph_ops< graph_t >::write_EDGE_line(), mrpt::poses::CPosePDFGaussianInf::writeToStream(), and mrpt::opengl::CRenderizable::writeToStreamRender().
◆ x() [3/3]
|
inlineinherited |
- Parameters
-
v Set X coord.
Definition at line 153 of file CPoseOrPoint.h.
◆ x_incr()
|
inlineinherited |
- Parameters
-
v X+=v
Definition at line 162 of file CPoseOrPoint.h.
Referenced by mrpt::slam::CICP::ICP_Method_Classic(), and mrpt::maps::CBeaconMap::internal_insertObservation().

◆ y() [1/3]
|
inlineinherited |
Definition at line 148 of file CPoseOrPoint.h.
◆ y() [2/3]
|
inlineinherited |
< Get Y coord.
Definition at line 139 of file CPoseOrPoint.h.
Referenced by mrpt::nav::CPTG_RobotShape_Circular::add_robotShape_to_setOfLines(), mrpt::slam::CGridMapAligner::AlignPDF_robustMatch(), mrpt::poses::CPoint< DERIVEDCLASS >::asString(), asString(), mrpt::graphs::detail::graph_ops< graph_t >::auxEuclid2Dist(), mrpt::poses::CPoint2DPDFGaussian::bayesianFusion(), mrpt::poses::CPointPDFSOG::bayesianFusion(), mrpt::poses::CPointPDFGaussian::bayesianFusion(), mrpt::poses::CPosePDFGaussian::bayesianFusion(), mrpt::poses::CPosePDFGaussianInf::bayesianFusion(), mrpt::maps::CMultiMetricMapPDF::prediction_and_update< mrpt::slam::OptimalProposal >(), mrpt::maps::CColouredPointsMap::colourFromObservation(), mrpt::obs::CActionRobotMovement3D::computeFromOdometry_model6DOF(), mrpt::obs::CActionRobotMovement2D::computeFromOdometry_modelThrun(), mrpt::maps::COccupancyGridMap2D::computeLikelihoodField_Thrun(), mrpt::maps::CBeaconMap::computeMatchingWith3DLandmarks(), mrpt::maps::CLandmarksMap::computeMatchingWith3DLandmarks(), mrpt::vision::computeMsd(), mrpt::maps::COccupancyGridMap2D::computeObservationLikelihood_CellsDifference(), mrpt::poses::CPose3DQuatPDFGaussian::copyFrom(), mrpt::poses::CPose3DPDFGaussian::copyFrom(), mrpt::poses::CPosePDFParticles::copyFrom(), mrpt::poses::CPoint2D::CPoint2D(), mrpt::poses::CPoint3D::CPoint3D(), CPose2D(), mrpt::poses::CPose3DQuat::CPose3DQuat(), mrpt::poses::CPose3DRotVec::CPose3DRotVec(), mrpt::hwdrivers::CIbeoLuxETH::dataCollection(), mrpt::maps::CPointsMap::determineMatching2D(), mrpt::nav::PoseDistanceMetric< TNodeSE2_TP >::distance(), mrpt::poses::CPoseOrPoint< DERIVEDCLASS >::distance2DToSquare(), mrpt::poses::CPoseOrPoint< DERIVEDCLASS >::distance3DToSquare(), mrpt::poses::CPoseRandomSampler::do_sample_2D(), mrpt::poses::CPoseRandomSampler::do_sample_3D(), mrpt::graphs::detail::CVisualizer< CPOSE, MAPS_IMPLEMENTATION, NODE_ANNOTATIONS, EDGE_ANNOTATIONS >::drawEdgeRelPoses(), mrpt::graphs::detail::CMRVisualizer< CPOSE, MAPS_IMPLEMENTATION, TMRSlamNodeAnnotations, EDGE_ANNOTATIONS >::drawEdges(), mrpt::graphs::detail::CVisualizer< CPOSE, MAPS_IMPLEMENTATION, NODE_ANNOTATIONS, EDGE_ANNOTATIONS >::drawEdges(), mrpt::poses::CPose3DPDFGaussian::drawManySamples(), mrpt::poses::CPose3DPDFGaussianInf::drawManySamples(), mrpt::poses::CPosePDFGaussian::drawManySamples(), mrpt::poses::CPosePDFGaussianInf::drawManySamples(), mrpt::poses::CPoint2DPDFGaussian::drawSingleSample(), mrpt::poses::CPointPDFGaussian::drawSingleSample(), mrpt::poses::CPointPDFSOG::drawSingleSample(), mrpt::poses::CPosePDFGaussian::drawSingleSample(), mrpt::poses::CPosePDFGaussianInf::drawSingleSample(), mrpt::poses::CPose3DPDFGaussian::drawSingleSample(), mrpt::poses::CPose3DPDFGaussianInf::drawSingleSample(), mrpt::obs::CActionRobotMovement2D::drawSingleSample_modelThrun(), mrpt::hmtslam::CHierarchicalMapMHPartition::dumpAsText(), mrpt::poses::SE_traits< 2 >::exp(), mrpt::poses::CPose3D::exp(), mrpt::obs::CActionRobotMovement2D::fastDrawSingleSample_modelGaussian(), mrpt::vision::frameJac(), fromString(), Pose3DTests::func_inv_compose_point(), Pose3DQuatTests::func_inv_compose_point(), func_laserSimul_callback(), mrpt::maps::CBeacon::generateObservationModelDistribution(), mrpt::maps::CBeacon::generateRingSOG(), mrpt::maps::CBeacon::getAs3DObject(), mrpt::slam::CRangeBearingKFSLAM::getAs3DObject(), mrpt::slam::CRangeBearingKFSLAM2D::getAs3DObject(), mrpt::hmtslam::CHierarchicalMapMHPartition::getAs3DScene(), mrpt::hmtslam::CLocalMetricHypothesis::getAs3DScene(), mrpt::slam::CIncrementalMapPartitioner::getAs3DScene(), mrpt::maps::CBeacon::getAsMatlabDrawCommands(), mrpt::math::TLine2D::getAsPose2D(), mrpt::poses::CPoint< DERIVEDCLASS >::getHomogeneousMatrix(), mrpt::poses::CRobot2DPoseEstimator::getLatestRobotPose(), mrpt::hwdrivers::CImageGrabber_FlyCapture2::getObservation(), mrpt::maps::CLandmark::getPose(), mrpt::opengl::CRenderizable::getPoseY(), mrpt::opengl::graph_tools::graph_visualize(), mrpt::slam::CICP::ICP3D_Method_Classic(), mrpt::slam::CICP::ICP_Method_Classic(), mrpt::slam::CICP::ICP_Method_LM(), mrpt::maps::COctoMapBase< OCTREE, OCTREE_NODE >::internal_build_PointCloud_for_observation(), mrpt::maps::CBeaconMap::internal_computeObservationLikelihood(), mrpt::maps::CReflectivityGridMap2D::internal_computeObservationLikelihood(), mrpt::maps::CLandmarksMap::internal_computeObservationLikelihood(), mrpt::maps::CColouredOctoMap::internal_insertObservation(), mrpt::maps::CBeaconMap::internal_insertObservation(), mrpt::maps::CGasConcentrationGridMap2D::internal_insertObservation(), mrpt::maps::COccupancyGridMap2D::internal_insertObservation(), mrpt::maps::CReflectivityGridMap2D::internal_insertObservation(), mrpt::maps::CWirelessPowerGridMap2D::internal_insertObservation(), mrpt::poses::CPose3DQuatPDFGaussian::inverse(), mrpt::poses::CPose3DQuatPDFGaussianInf::inverse(), mrpt::poses::CPosePDFGaussian::inverse(), mrpt::poses::CPosePDFGaussianInf::inverse(), mrpt::poses::CPosePDFGaussian::inverseComposition(), jacob_dA_eps_D_p_deps(), mrpt::poses::CPosePDF::jacobiansPoseComposition(), mrpt::poses::CPose3DQuatPDF::jacobiansPoseComposition(), mrpt::slam::KLF_loadBinFromParticle(), mrpt::maps::COccupancyGridMap2D::laserScanSimulator(), mrpt::poses::SE_traits< 2 >::ln(), mrpt::hmtslam::CLSLAM_RBPF_2DLASER::loadTPathBinFromPath(), mrpt::hmtslam::CHMTSLAM::LSLAM_process_message_from_AA(), mrpt::poses::CPoint2DPDFGaussian::mahalanobisDistanceTo(), mrpt::poses::CPointPDFGaussian::mahalanobisDistanceTo(), mrpt::poses::CPoint2DPDFGaussian::mahalanobisDistanceToPoint(), mrpt::poses::CPosePDFSOG::mergeModes(), mrpt::poses::CPoseOrPoint< DERIVEDCLASS >::norm(), mrpt::slam::CRangeBearingKFSLAM2D::OnGetAction(), mrpt::slam::CRangeBearingKFSLAM2D::OnObservationModel(), mrpt::slam::CRangeBearingKFSLAM2D::OnTransitionModel(), mrpt::poses::operator!=(), operator+(), mrpt::poses::operator+(), mrpt::poses::operator==(), mrpt::topography::path_from_rtk_gps(), mrpt::opengl::CSetOfObjects::posePDF2opengl(), mrpt::hwdrivers::CSkeletonTracker::processPreviewNone(), mrpt::poses::CPoint2DPDFGaussian::productIntegralWith(), mrpt::poses::CPointPDFGaussian::productIntegralWith(), mrpt::poses::CPointPDFGaussian::productIntegralWith2D(), mrpt::math::project2D(), ransac_data_assoc_run(), mrpt::opengl::CRenderizable::readFromStreamRender(), mrpt::opengl::COpenGLViewport::render(), mrpt::opengl::CPlanarLaserScan::render_dl(), mrpt::slam::CRejectionSamplingRangeOnlyLocalization::RS_drawFromProposal(), mrpt::slam::CRangeBearingKFSLAM2D::saveMapAndPath2DRepresentationAsMATLABFile(), mrpt::poses::CPoint2DPDFGaussian::saveToTextFile(), mrpt::poses::CPointPDFGaussian::saveToTextFile(), mrpt::poses::CPose3DPDFGaussian::saveToTextFile(), mrpt::poses::CPose3DPDFGaussianInf::saveToTextFile(), mrpt::poses::CPose3DQuatPDFGaussian::saveToTextFile(), mrpt::poses::CPose3DQuatPDFGaussianInf::saveToTextFile(), mrpt::poses::CPosePDFGaussian::saveToTextFile(), mrpt::poses::CPosePDFGaussianInf::saveToTextFile(), se3_l2_internal(), mrpt::tfest::se3_l2_robust(), mrpt::opengl::CRenderizable::setLocation(), mrpt::opengl::CRenderizable::setPose(), mrpt::maps::CLandmark::setPose(), mrpt::poses::CPose3D::setYawPitchRoll(), mrpt::math::slerp(), mrpt::nav::PlannerRRT_SE2_TPS::solve(), mrpt::maps::COccupancyGridMap2D::sonarSimulator(), mrpt::poses::CPoseOrPoint< DERIVEDCLASS >::sqrDistanceTo(), Pose3DTests::test_composePoint(), Pose3DTests::test_to_from_2d(), mrpt::opengl::CDisk::traceRay(), mrpt::opengl::CSphere::traceRay(), mrpt::nav::PlannerTPS_VirtualBase::transformPointcloudWithSquareClipping(), mrpt::graphs::detail::graph_ops< graph_t >::write_EDGE_line(), mrpt::poses::CPosePDFGaussianInf::writeToStream(), and mrpt::opengl::CRenderizable::writeToStreamRender().
◆ y() [3/3]
|
inlineinherited |
- Parameters
-
v Set Y coord.
Definition at line 157 of file CPoseOrPoint.h.
◆ y_incr()
|
inlineinherited |
- Parameters
-
v Y+=v
Definition at line 166 of file CPoseOrPoint.h.
Referenced by mrpt::slam::CICP::ICP_Method_Classic(), and mrpt::maps::CBeaconMap::internal_insertObservation().
Member Data Documentation
◆ _init_CPose2D
|
staticprotected |
◆ className
|
staticconstexpr |
◆ m_coords
| mrpt::math::CArrayDouble<2> mrpt::poses::CPose2D::m_coords |
[x,y]
Definition at line 47 of file CPose2D.h.
Referenced by AddComponents(), composeFrom(), composePoint(), CPose2D(), getAsVector(), getHomogeneousMatrix(), getOppositeScalar(), inverse(), inverseComposeFrom(), inverseComposePoint(), operator*=(), operator+(), operator[](), readFromStream(), and writeToStream().
◆ m_cosphi
|
mutableprotected |
Precomputed cos() & sin() of phi.
Definition at line 53 of file CPose2D.h.
Referenced by composeFrom(), composePoint(), getHomogeneousMatrix(), getRotationMatrix(), inverse(), inverseComposeFrom(), inverseComposePoint(), operator+(), phi_cos(), and update_cached_cos_sin().
◆ m_cossin_uptodate
|
mutableprotected |
Definition at line 54 of file CPose2D.h.
Referenced by AddComponents(), composeFrom(), inverse(), inverseComposeFrom(), normalizePhi(), operator*=(), phi(), phi_incr(), readFromStream(), and update_cached_cos_sin().
◆ m_phi
|
protected |
The orientation of the pose, in radians.
Definition at line 51 of file CPose2D.h.
Referenced by AddComponents(), asString(), composeFrom(), getAsVector(), getOppositeScalar(), inverse(), inverseComposeFrom(), normalizePhi(), operator*=(), operator+(), operator[](), phi(), phi_incr(), readFromStream(), update_cached_cos_sin(), and writeToStream().
◆ m_sinphi
|
protected |
Definition at line 53 of file CPose2D.h.
Referenced by composeFrom(), composePoint(), getHomogeneousMatrix(), getRotationMatrix(), inverse(), inverseComposeFrom(), inverseComposePoint(), operator+(), phi_sin(), and update_cached_cos_sin().
◆ runtimeClassId
|
staticprotected |