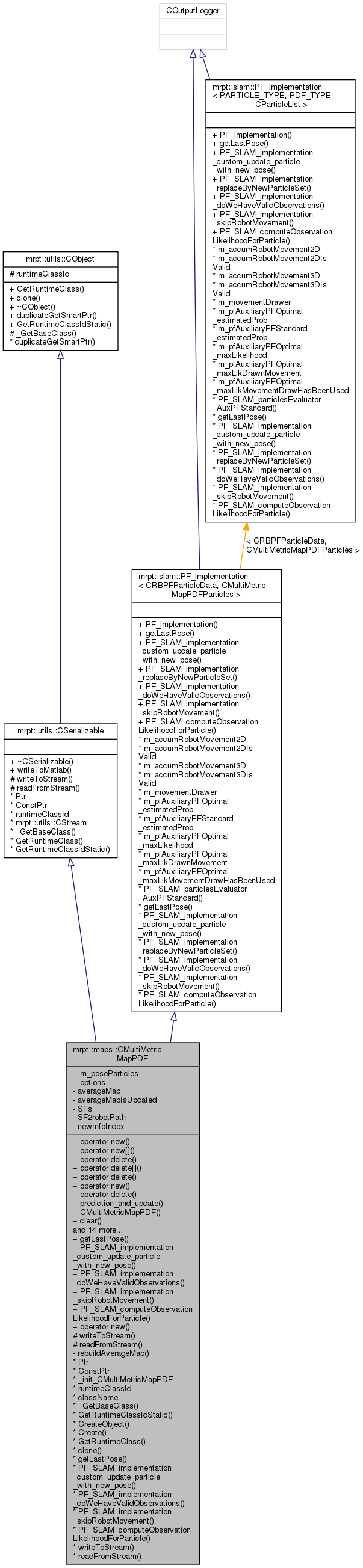
Detailed Description
Declares a class that represents a Rao-Blackwellized set of particles for solving the SLAM problem (This class is the base of RBPF-SLAM applications).
This class is used internally by the map building algorithm in "mrpt::slam::CMetricMapBuilderRBPF"
Definition at line 67 of file CMultiMetricMapPDF.h.
#include <mrpt/maps/CMultiMetricMapPDF.h>
Classes | |
| struct | TPredictionParams |
| The struct for passing extra simulation parameters to the prediction/update stage when running a particle filter. More... | |
Public Types | |
| using | ParticleData = CMultiMetricMapPDFParticles |
| using | CParticleList = ParticleData::CParticleList |
| using | CParticleDataContent = ParticleData::CParticleDataContent |
Public Member Functions | |
| void * | operator new (size_t size) |
| void * | operator new[] (size_t size) |
| void | operator delete (void *ptr) noexcept |
| void | operator delete[] (void *ptr) noexcept |
| void | operator delete (void *memory, void *ptr) noexcept |
| void * | operator new (size_t size, const std::nothrow_t &) noexcept |
| void | operator delete (void *ptr, const std::nothrow_t &) noexcept |
| template<class PF_ALGORITHM > | |
| void | prediction_and_update (const mrpt::obs::CActionCollection *actions, const mrpt::obs::CSensoryFrame *observation, const bayes::CParticleFilter::TParticleFilterOptions &PF_options) |
| CMultiMetricMapPDF (const bayes::CParticleFilter::TParticleFilterOptions &opts=bayes::CParticleFilter::TParticleFilterOptions(), const mrpt::maps::TSetOfMetricMapInitializers *mapsInitializers=nullptr, const TPredictionParams *predictionOptions=nullptr) | |
| Constructor. More... | |
| void | clear (const mrpt::poses::CPose2D &initialPose) |
| Clear all elements of the maps, and restore all paths to a single starting pose. More... | |
| void | clear (const mrpt::poses::CPose3D &initialPose) |
| void | clear (const mrpt::maps::CSimpleMap &prevMap, const mrpt::poses::CPose3D ¤tPose) |
| Resets the map by loading an already-mapped map for past poses. More... | |
| void | getEstimatedPosePDFAtTime (size_t timeStep, mrpt::poses::CPose3DPDFParticles &out_estimation) const |
| Returns the estimate of the robot pose as a particles PDF for the instant of time "timeStep", from 0 to N-1. More... | |
| void | getEstimatedPosePDF (mrpt::poses::CPose3DPDFParticles &out_estimation) const |
| Returns the current estimate of the robot pose, as a particles PDF. More... | |
| const CMultiMetricMap * | getAveragedMetricMapEstimation () |
| Returns the weighted averaged map based on the current best estimation. More... | |
| const CMultiMetricMap * | getCurrentMostLikelyMetricMap () const |
| Returns a pointer to the current most likely map (associated to the most likely particle) More... | |
| size_t | getNumberOfObservationsInSimplemap () const |
| Get the number of CSensoryFrame inserted into the internal member SFs. More... | |
| bool | insertObservation (mrpt::obs::CSensoryFrame &sf) |
| Insert an observation to the map, at each particle's pose and to each particle's metric map. More... | |
| void | getPath (size_t i, std::deque< math::TPose3D > &out_path) const |
| Return the path (in absolute coordinate poses) for the i'th particle. More... | |
| double | getCurrentEntropyOfPaths () |
| Returns the current entropy of paths, computed as the average entropy of poses along the path, where entropy of each pose estimation is computed as the entropy of the gaussian approximation covariance. More... | |
| double | getCurrentJointEntropy () |
| Returns the joint entropy estimation over paths and maps, acording to "Information Gain-based Exploration Using" by C. More... | |
| void | updateSensoryFrameSequence () |
| Update the poses estimation of the member "SFs" according to the current path belief. More... | |
| void | saveCurrentPathEstimationToTextFile (const std::string &fil) |
| A logging utility: saves the current path estimation for each particle in a text file (a row per particle, each 3-column-entry is a set [x,y,phi], respectively). More... | |
| void | executeOn (mrpt::bayes::CParticleFilter &pf, const mrpt::obs::CActionCollection *action, const mrpt::obs::CSensoryFrame *observation, mrpt::bayes::CParticleFilter::TParticleFilterStats *stats, mrpt::bayes::CParticleFilter::TParticleFilterAlgorithm PF_algorithm) |
| virtual mxArray * | writeToMatlab () const |
Introduces a pure virtual method responsible for writing to a mxArray Matlab object, typically a MATLAB struct whose contents are documented in each derived class. More... | |
Virtual methods that the PF_implementations assume exist. | |
| mrpt::math::TPose3D | getLastPose (const size_t i, bool &pose_is_valid) const override |
| Return the last robot pose in the i'th particle; is_valid_pose will be false if there is no such last pose. More... | |
| void | PF_SLAM_implementation_custom_update_particle_with_new_pose (CParticleDataContent *particleData, const mrpt::math::TPose3D &newPose) const override |
| bool | PF_SLAM_implementation_doWeHaveValidObservations (const CParticleList &particles, const mrpt::obs::CSensoryFrame *sf) const override |
| bool | PF_SLAM_implementation_skipRobotMovement () const override |
| Do not move the particles until the map is populated. More... | |
| double | PF_SLAM_computeObservationLikelihoodForParticle (const mrpt::bayes::CParticleFilter::TParticleFilterOptions &PF_options, const size_t particleIndexForMap, const mrpt::obs::CSensoryFrame &observation, const mrpt::poses::CPose3D &x) const override |
| Evaluate the observation likelihood for one particle at a given location. More... | |
RTTI classes and functions | |
| mrpt::utils::CObject::Ptr | duplicateGetSmartPtr () const |
| Returns a copy of the object, indepently of its class, as a smart pointer (the newly created object will exist as long as any copy of this smart pointer). More... | |
Virtual methods that the PF_implementations assume exist. | |
| virtual void | PF_SLAM_implementation_custom_update_particle_with_new_pose (CRBPFParticleData *particleData, const mrpt::math::TPose3D &newPose) const=0 |
| virtual void | PF_SLAM_implementation_replaceByNewParticleSet (typename CMultiMetricMapPDFParticles ::CParticleList &old_particles, const std::vector< mrpt::math::TPose3D > &newParticles, const std::vector< double > &newParticlesWeight, const std::vector< size_t > &newParticlesDerivedFromIdx) const |
| This is the default algorithm to efficiently replace one old set of samples by another new set. More... | |
| virtual bool | PF_SLAM_implementation_doWeHaveValidObservations (const typename mrpt::bayes::CParticleFilterData< CRBPFParticleData >::typename CMultiMetricMapPDFParticles ::CParticleList &particles, const mrpt::obs::CSensoryFrame *sf) const |
Static Public Member Functions | |
| static void * | operator new (size_t size, void *ptr) |
Public Attributes | |
| ParticleData | m_poseParticles |
| mrpt::maps::CMultiMetricMapPDF::TPredictionParams | options |
Protected Member Functions | |
CSerializable virtual methods | |
| void | writeToStream (mrpt::utils::CStream &out, int *getVersion) const override |
| Introduces a pure virtual method responsible for writing to a CStream. More... | |
| void | readFromStream (mrpt::utils::CStream &in, int version) override |
| Introduces a pure virtual method responsible for loading from a CStream This can not be used directly be users, instead use "stream >> object;" for reading it from a stream or "stream >> object_ptr;" if the class is unknown apriori. More... | |
Private Member Functions | |
| void | rebuildAverageMap () |
| Rebuild the "expected" grid map. More... | |
Private Attributes | |
| mrpt::maps::CMultiMetricMap | averageMap |
| Internal buffer for the averaged map. More... | |
| bool | averageMapIsUpdated |
| mrpt::maps::CSimpleMap | SFs |
| The SFs and their corresponding pose estimations. More... | |
| std::vector< uint32_t > | SF2robotPath |
| A mapping between indexes in the SFs to indexes in the robot paths from particles. More... | |
| float | newInfoIndex |
| An index [0,1] measuring how much information an observation aports to the map (Typ. More... | |
Friends | |
| class | mrpt::slam::CMetricMapBuilderRBPF |
RTTI stuff | |
| using | Ptr = std::shared_ptr< CMultiMetricMapPDF > |
| using | ConstPtr = std::shared_ptr< const CMultiMetricMapPDF > |
| static mrpt::utils::CLASSINIT | _init_CMultiMetricMapPDF |
| static const mrpt::utils::TRuntimeClassId | runtimeClassId |
| static constexpr const char * | className = "CMultiMetricMapPDF" |
| static const mrpt::utils::TRuntimeClassId * | _GetBaseClass () |
| static const mrpt::utils::TRuntimeClassId & | GetRuntimeClassIdStatic () |
| static mrpt::utils::CObject * | CreateObject () |
| template<typename... Args> | |
| static Ptr | Create (Args &&... args) |
| virtual const mrpt::utils::TRuntimeClassId * | GetRuntimeClass () const override |
| Returns information about the class of an object in runtime. More... | |
| virtual mrpt::utils::CObject * | clone () const override |
| Returns a deep copy (clone) of the object, indepently of its class. More... | |
Member Typedef Documentation
◆ ConstPtr
| using mrpt::maps::CMultiMetricMapPDF::ConstPtr = std::shared_ptr<const CMultiMetricMapPDF > |
Definition at line 80 of file CMultiMetricMapPDF.h.
◆ CParticleDataContent
Definition at line 74 of file CMultiMetricMapPDF.h.
◆ CParticleList
Definition at line 73 of file CMultiMetricMapPDF.h.
◆ ParticleData
Definition at line 72 of file CMultiMetricMapPDF.h.
◆ Ptr
| using mrpt::maps::CMultiMetricMapPDF::Ptr = std::shared_ptr< CMultiMetricMapPDF > |
A typedef for the associated smart pointer
Definition at line 80 of file CMultiMetricMapPDF.h.
Constructor & Destructor Documentation
◆ CMultiMetricMapPDF()
| CMultiMetricMapPDF::CMultiMetricMapPDF | ( | const bayes::CParticleFilter::TParticleFilterOptions & | opts = bayes::CParticleFilter::TParticleFilterOptions(), |
| const mrpt::maps::TSetOfMetricMapInitializers * | mapsInitializers = nullptr, |
||
| const TPredictionParams * | predictionOptions = nullptr |
||
| ) |
Constructor.
Definition at line 46 of file CMultiMetricMapPDF.cpp.
References mrpt::utils::clear().
Referenced by prediction_and_update().


Member Function Documentation
◆ _GetBaseClass()
|
staticprotected |
◆ clear() [1/3]
| void CMultiMetricMapPDF::clear | ( | const mrpt::poses::CPose2D & | initialPose | ) |
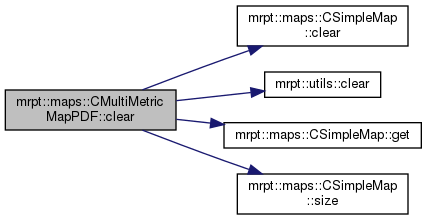
Clear all elements of the maps, and restore all paths to a single starting pose.
Definition at line 76 of file CMultiMetricMapPDF.cpp.
References mrpt::utils::clear().
Referenced by mrpt::slam::CMetricMapBuilderRBPF::clear(), and mrpt::slam::CMetricMapBuilderRBPF::initialize().


◆ clear() [2/3]
| void CMultiMetricMapPDF::clear | ( | const mrpt::poses::CPose3D & | initialPose | ) |
This is an overloaded member function, provided for convenience. It differs from the above function only in what argument(s) it accepts.
Definition at line 85 of file CMultiMetricMapPDF.cpp.
◆ clear() [3/3]
| void CMultiMetricMapPDF::clear | ( | const mrpt::maps::CSimpleMap & | prevMap, |
| const mrpt::poses::CPose3D & | currentPose | ||
| ) |
Resets the map by loading an already-mapped map for past poses.
Current robot pose should be normally set to the last keyframe in the simplemap.
Definition at line 104 of file CMultiMetricMapPDF.cpp.
References ASSERT_, mrpt::maps::CSimpleMap::clear(), mrpt::utils::clear(), mrpt::maps::CSimpleMap::get(), IS_CLASS, and mrpt::maps::CSimpleMap::size().
◆ clone()
|
overridevirtual |
Returns a deep copy (clone) of the object, indepently of its class.
Implements mrpt::utils::CObject.
◆ Create()
|
inlinestatic |
Definition at line 80 of file CMultiMetricMapPDF.h.
◆ CreateObject()
|
static |
◆ executeOn()
| void mrpt::maps::CMultiMetricMapPDF::executeOn | ( | mrpt::bayes::CParticleFilter & | pf, |
| const mrpt::obs::CActionCollection * | action, | ||
| const mrpt::obs::CSensoryFrame * | observation, | ||
| mrpt::bayes::CParticleFilter::TParticleFilterStats * | stats, | ||
| mrpt::bayes::CParticleFilter::TParticleFilterAlgorithm | PF_algorithm | ||
| ) |
Definition at line 1022 of file CMultiMetricMapPDF_RBPF.cpp.
References mrpt::bayes::CParticleFilter::executeOn(), mrpt::bayes::CParticleFilter::pfAuxiliaryPFOptimal, mrpt::bayes::CParticleFilter::pfAuxiliaryPFStandard, mrpt::bayes::CParticleFilter::pfOptimalProposal, mrpt::bayes::CParticleFilter::pfStandardProposal, and THROW_EXCEPTION.
Referenced by mrpt::slam::CMetricMapBuilderRBPF::processActionObservation().


◆ getAveragedMetricMapEstimation()
| const CMultiMetricMap * CMultiMetricMapPDF::getAveragedMetricMapEstimation | ( | ) |
Returns the weighted averaged map based on the current best estimation.
If you need a persistent copy of this object, please use "CSerializable::duplicate" and use the copy.
- See also
- Almost 100% sure you would prefer the best current map, given by getCurrentMostLikelyMetricMap()
Definition at line 310 of file CMultiMetricMapPDF.cpp.
◆ getCurrentEntropyOfPaths()
| double CMultiMetricMapPDF::getCurrentEntropyOfPaths | ( | ) |
Returns the current entropy of paths, computed as the average entropy of poses along the path, where entropy of each pose estimation is computed as the entropy of the gaussian approximation covariance.
Definition at line 479 of file CMultiMetricMapPDF.cpp.
References mrpt::utils::CProbabilityDensityFunction< TDATA, STATE_LEN >::getCovarianceEntropy().

◆ getCurrentJointEntropy()
| double CMultiMetricMapPDF::getCurrentJointEntropy | ( | ) |
Returns the joint entropy estimation over paths and maps, acording to "Information Gain-based Exploration Using" by C.
Stachniss, G. Grissetti and W.Burgard.
Definition at line 509 of file CMultiMetricMapPDF.cpp.
References ASSERT_, mrpt::maps::COccupancyGridMap2D::TEntropyInfo::H, and min.
Referenced by mrpt::slam::CMetricMapBuilderRBPF::getCurrentJointEntropy().

◆ getCurrentMostLikelyMetricMap()
| const CMultiMetricMap * CMultiMetricMapPDF::getCurrentMostLikelyMetricMap | ( | ) | const |
Returns a pointer to the current most likely map (associated to the most likely particle)
Definition at line 561 of file CMultiMetricMapPDF.cpp.
Referenced by mrpt::slam::CMetricMapBuilderRBPF::drawCurrentEstimationToImage(), and mrpt::slam::CMetricMapBuilderRBPF::getCurrentlyBuiltMetricMap().

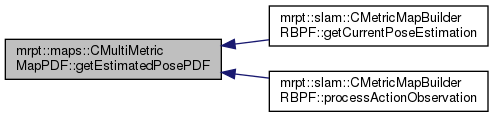
◆ getEstimatedPosePDF()
| void CMultiMetricMapPDF::getEstimatedPosePDF | ( | mrpt::poses::CPose3DPDFParticles & | out_estimation | ) | const |
Returns the current estimate of the robot pose, as a particles PDF.
- See also
- getEstimatedPosePDFAtTime
Definition at line 172 of file CMultiMetricMapPDF.cpp.
References ASSERT_.
Referenced by mrpt::slam::CMetricMapBuilderRBPF::getCurrentPoseEstimation(), and mrpt::slam::CMetricMapBuilderRBPF::processActionObservation().
◆ getEstimatedPosePDFAtTime()
| void CMultiMetricMapPDF::getEstimatedPosePDFAtTime | ( | size_t | timeStep, |
| mrpt::poses::CPose3DPDFParticles & | out_estimation | ||
| ) | const |
Returns the estimate of the robot pose as a particles PDF for the instant of time "timeStep", from 0 to N-1.
- See also
- getEstimatedPosePDF
Definition at line 183 of file CMultiMetricMapPDF.cpp.
References mrpt::bayes::CParticleFilterData< T >::clearParticles(), and mrpt::bayes::CParticleFilterData< T >::m_particles.

◆ getLastPose()
|
overridevirtual |
Return the last robot pose in the i'th particle; is_valid_pose will be false if there is no such last pose.
- Exceptions
-
std::exception on out-of-range particle index
Implements mrpt::slam::PF_implementation< CRBPFParticleData, CMultiMetricMapPDFParticles >.
Definition at line 293 of file CMultiMetricMapPDF.cpp.
References THROW_EXCEPTION.
◆ getNumberOfObservationsInSimplemap()
|
inline |
Get the number of CSensoryFrame inserted into the internal member SFs.
Definition at line 211 of file CMultiMetricMapPDF.h.
References SFs, and mrpt::maps::CSimpleMap::size().

◆ getPath()
| void CMultiMetricMapPDF::getPath | ( | size_t | i, |
| std::deque< math::TPose3D > & | out_path | ||
| ) | const |
Return the path (in absolute coordinate poses) for the i'th particle.
- Exceptions
-
On index out of bounds
Definition at line 469 of file CMultiMetricMapPDF.cpp.
References THROW_EXCEPTION.
Referenced by mrpt::slam::CMetricMapBuilderRBPF::drawCurrentEstimationToImage(), and mrpt::slam::CMetricMapBuilderRBPF::getCurrentMostLikelyPath().

◆ GetRuntimeClass()
|
overridevirtual |
Returns information about the class of an object in runtime.
Reimplemented from mrpt::utils::CSerializable.
◆ GetRuntimeClassIdStatic()
|
static |
◆ insertObservation()
| bool CMultiMetricMapPDF::insertObservation | ( | mrpt::obs::CSensoryFrame & | sf | ) |
Insert an observation to the map, at each particle's pose and to each particle's metric map.
- Parameters
-
sf The SF to be inserted
- Returns
- true if any may was updated, false otherwise
Definition at line 436 of file CMultiMetricMapPDF.cpp.
References mrpt::obs::CSensoryFrame::insertObservationsInto().
Referenced by mrpt::slam::CMetricMapBuilderRBPF::processActionObservation().


◆ operator delete() [1/3]
Definition at line 80 of file CMultiMetricMapPDF.h.
◆ operator delete() [2/3]
Definition at line 80 of file CMultiMetricMapPDF.h.
◆ operator delete() [3/3]
|
inlinenoexcept |
Definition at line 80 of file CMultiMetricMapPDF.h.
◆ operator delete[]()
Definition at line 80 of file CMultiMetricMapPDF.h.
◆ operator new() [1/3]
Definition at line 80 of file CMultiMetricMapPDF.h.
◆ operator new() [2/3]
|
inlinenoexcept |
Definition at line 80 of file CMultiMetricMapPDF.h.
◆ operator new() [3/3]
|
inline |
Definition at line 80 of file CMultiMetricMapPDF.h.
◆ operator new[]()
|
inline |
Definition at line 80 of file CMultiMetricMapPDF.h.
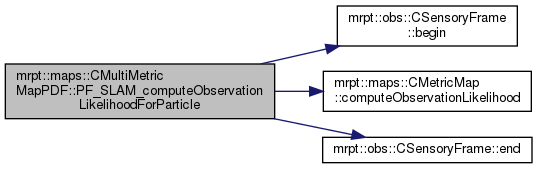
◆ PF_SLAM_computeObservationLikelihoodForParticle()
|
overridevirtual |
Evaluate the observation likelihood for one particle at a given location.
Implements mrpt::slam::PF_implementation< CRBPFParticleData, CMultiMetricMapPDFParticles >.
Definition at line 1007 of file CMultiMetricMapPDF_RBPF.cpp.
References mrpt::obs::CSensoryFrame::begin(), mrpt::maps::CMetricMap::computeObservationLikelihood(), mrpt::obs::CSensoryFrame::end(), and MRPT_UNUSED_PARAM.
◆ PF_SLAM_implementation_custom_update_particle_with_new_pose() [1/2]
|
pure virtualinherited |
◆ PF_SLAM_implementation_custom_update_particle_with_new_pose() [2/2]
|
override |
Definition at line 979 of file CMultiMetricMapPDF_RBPF.cpp.
References mrpt::maps::CRBPFParticleData::robotPath.
◆ PF_SLAM_implementation_doWeHaveValidObservations() [1/2]
|
inlinevirtualinherited |
Definition at line 179 of file PF_implementations_data.h.
◆ PF_SLAM_implementation_doWeHaveValidObservations() [2/2]
|
override |
Definition at line 986 of file CMultiMetricMapPDF_RBPF.cpp.
References ASSERT_.
◆ PF_SLAM_implementation_replaceByNewParticleSet()
|
inlinevirtualinherited |
This is the default algorithm to efficiently replace one old set of samples by another new set.
The method uses pointers to make fast copies the first time each particle is duplicated, then makes real copies for the next ones.
Note that more efficient specializations might exist for specific particle data structs.
Definition at line 105 of file PF_implementations_data.h.
◆ PF_SLAM_implementation_skipRobotMovement()
|
overridevirtual |
Do not move the particles until the map is populated.
Reimplemented from mrpt::slam::PF_implementation< CRBPFParticleData, CMultiMetricMapPDFParticles >.
Definition at line 998 of file CMultiMetricMapPDF_RBPF.cpp.
◆ PF_SLAM_particlesEvaluator_AuxPFStandard()
|
staticinherited |
Compute w[i]*p(z_t | mu_t^i), with mu_t^i being the mean of the new robot pose.
- Parameters
-
action MUST be a "const CPose3D*" observation MUST be a "const CSensoryFrame*"
◆ prediction_and_update()
|
inline |
Definition at line 85 of file CMultiMetricMapPDF.h.
References CMultiMetricMapPDF(), mrpt::maps::CMultiMetricMapPDF::TPredictionParams::KLD_params, MRPT_END, MRPT_START, and options.

◆ readFromStream()
|
overrideprotectedvirtual |
Introduces a pure virtual method responsible for loading from a CStream This can not be used directly be users, instead use "stream >> object;" for reading it from a stream or "stream >> object_ptr;" if the class is unknown apriori.
- Parameters
-
in The input binary stream where the object data must read from. version The version of the object stored in the stream: use this version number in your code to know how to read the incoming data.
- Exceptions
-
std::exception On any error, see CStream::ReadBuffer
- See also
- CStream
Implements mrpt::utils::CSerializable.
Definition at line 252 of file CMultiMetricMapPDF.cpp.
References MRPT_THROW_UNKNOWN_SERIALIZATION_VERSION.
◆ rebuildAverageMap()
|
private |
Rebuild the "expected" grid map.
Used internally, do not call
Definition at line 319 of file CMultiMetricMapPDF.cpp.
References ASSERT_, min, MRPT_END, and MRPT_START.
◆ saveCurrentPathEstimationToTextFile()
| void CMultiMetricMapPDF::saveCurrentPathEstimationToTextFile | ( | const std::string & | fil | ) |
A logging utility: saves the current path estimation for each particle in a text file (a row per particle, each 3-column-entry is a set [x,y,phi], respectively).
Definition at line 607 of file CMultiMetricMapPDF.cpp.
References mrpt::system::os::fclose(), mrpt::system::os::fopen(), and mrpt::system::os::fprintf().
Referenced by mrpt::slam::CMetricMapBuilderRBPF::saveCurrentPathEstimationToTextFile().

◆ updateSensoryFrameSequence()
| void CMultiMetricMapPDF::updateSensoryFrameSequence | ( | ) |
Update the poses estimation of the member "SFs" according to the current path belief.
Definition at line 582 of file CMultiMetricMapPDF.cpp.
References MRPT_END, and MRPT_START.
Referenced by mrpt::slam::CMetricMapBuilderRBPF::getCurrentlyBuiltMap().

◆ writeToMatlab()
|
inlinevirtualinherited |
Introduces a pure virtual method responsible for writing to a mxArray Matlab object, typically a MATLAB struct whose contents are documented in each derived class.
- Returns
- A new
mxArray(caller is responsible of memory freeing) or nullptr is class does not support conversion to MATLAB.
Definition at line 89 of file CSerializable.h.
◆ writeToStream()
|
overrideprotectedvirtual |
Introduces a pure virtual method responsible for writing to a CStream.
This can not be used directly be users, instead use "stream << object;" for writing it to a stream.
- Parameters
-
out The output binary stream where object must be dumped. getVersion If nullptr, the object must be dumped. If not, only the version of the object dump must be returned in this pointer. This enables the versioning of objects dumping and backward compatibility with previously stored data.
- Exceptions
-
std::exception On any error, see CStream::WriteBuffer
- See also
- CStream
Implements mrpt::utils::CSerializable.
Definition at line 226 of file CMultiMetricMapPDF.cpp.
Friends And Related Function Documentation
◆ mrpt::slam::CMetricMapBuilderRBPF
|
friend |
Definition at line 78 of file CMultiMetricMapPDF.h.
Member Data Documentation
◆ _init_CMultiMetricMapPDF
|
staticprotected |
Definition at line 80 of file CMultiMetricMapPDF.h.
◆ averageMap
|
private |
Internal buffer for the averaged map.
Definition at line 102 of file CMultiMetricMapPDF.h.
◆ averageMapIsUpdated
|
private |
Definition at line 103 of file CMultiMetricMapPDF.h.
◆ className
|
static |
Definition at line 80 of file CMultiMetricMapPDF.h.
◆ m_accumRobotMovement2D
|
inherited |
Definition at line 48 of file PF_implementations_data.h.
◆ m_accumRobotMovement2DIsValid
|
inherited |
Definition at line 49 of file PF_implementations_data.h.
◆ m_accumRobotMovement3D
|
inherited |
Definition at line 50 of file PF_implementations_data.h.
◆ m_accumRobotMovement3DIsValid
|
inherited |
Definition at line 51 of file PF_implementations_data.h.
◆ m_movementDrawer
|
inherited |
Used in al PF implementations.
- See also
- PF_SLAM_implementation_gatherActionsCheckBothActObs
Definition at line 55 of file PF_implementations_data.h.
◆ m_pfAuxiliaryPFOptimal_estimatedProb
|
mutableinherited |
Auxiliary variable used in the "pfAuxiliaryPFOptimal" algorithm.
Definition at line 57 of file PF_implementations_data.h.
◆ m_pfAuxiliaryPFOptimal_maxLikDrawnMovement
|
mutableinherited |
Auxiliary variable used in the "pfAuxiliaryPFOptimal" algorithm.
Definition at line 64 of file PF_implementations_data.h.
◆ m_pfAuxiliaryPFOptimal_maxLikelihood
|
mutableinherited |
Auxiliary variable used in the "pfAuxiliaryPFOptimal" algorithm.
Definition at line 61 of file PF_implementations_data.h.
◆ m_pfAuxiliaryPFOptimal_maxLikMovementDrawHasBeenUsed
|
inherited |
Definition at line 65 of file PF_implementations_data.h.
◆ m_pfAuxiliaryPFStandard_estimatedProb
|
mutableinherited |
Auxiliary variable used in the "pfAuxiliaryPFStandard" algorithm.
Definition at line 59 of file PF_implementations_data.h.
◆ m_poseParticles
| ParticleData mrpt::maps::CMultiMetricMapPDF::m_poseParticles |
Definition at line 75 of file CMultiMetricMapPDF.h.
Referenced by mrpt::slam::CMetricMapBuilderRBPF::drawCurrentEstimationToImage(), mrpt::slam::CMetricMapBuilderRBPF::getCurrentMostLikelyPath(), and mrpt::slam::CMetricMapBuilderRBPF::processActionObservation().
◆ newInfoIndex
|
private |
An index [0,1] measuring how much information an observation aports to the map (Typ.
threshold=0.07)
Definition at line 253 of file CMultiMetricMapPDF.h.
◆ options
| mrpt::maps::CMultiMetricMapPDF::TPredictionParams mrpt::maps::CMultiMetricMapPDF::options |
Referenced by prediction_and_update().
◆ runtimeClassId
|
staticprotected |
Definition at line 80 of file CMultiMetricMapPDF.h.
◆ SF2robotPath
|
private |
A mapping between indexes in the SFs to indexes in the robot paths from particles.
Definition at line 109 of file CMultiMetricMapPDF.h.
◆ SFs
|
private |
The SFs and their corresponding pose estimations.
Definition at line 106 of file CMultiMetricMapPDF.h.
Referenced by mrpt::slam::CMetricMapBuilderRBPF::getCurrentlyBuiltMap(), mrpt::slam::CMetricMapBuilderRBPF::getCurrentlyBuiltMapSize(), getNumberOfObservationsInSimplemap(), and mrpt::slam::CMetricMapBuilderRBPF::processActionObservation().