Detailed Description
An implementation of Hybrid Metric Topological SLAM (HMT-SLAM).
The main entry points for a user are pushAction() and pushObservations(). Several parameters can be modified through m_options.
The mathematical models of this approach have been reported in:
- Blanco J.L., Fernandez-Madrigal J.A., and Gonzalez J., "Towards a Unified Bayesian Approach to Hybrid Metric-Topological SLAM", in IEEE Transactions on Robotics (TRO), Vol. 24, No. 2, April 2008.
- ...
More information in the wiki page: http://www.mrpt.org/HMT-SLAM . A complete working application can be found in "MRPT/apps/hmt-slam".
The complete state of the SLAM framework is serializable, so it can be saved and restore to/from a binary dump. This class implements mrpt::utils::CSerializable, so it can be saved with "stream << slam_object;" and restored with "stream >> slam_object;". Alternatively, the methods CHMTSLAM::saveState and CHMTSLAM::loadState can be invoked, which in turn call internally to the CSerializable interface.
- See also
- CHierarchicalMHMap
Definition at line 65 of file CHMTSLAM.h.
#include <mrpt/hmtslam/CHMTSLAM.h>

Classes | |
| struct | TMessageLSLAMfromAA |
| Message definition: More... | |
| struct | TMessageLSLAMfromTBI |
| Message definition: More... | |
| struct | TMessageLSLAMtoTBI |
| Message definition: More... | |
| struct | TOptions |
| A variety of options and configuration params (private, use loadOptions). More... | |
Public Member Functions | |
| void * | operator new (size_t size) |
| void * | operator new[] (size_t size) |
| void | operator delete (void *ptr) noexcept |
| void | operator delete[] (void *ptr) noexcept |
| void | operator delete (void *memory, void *ptr) noexcept |
| void * | operator new (size_t size, const std::nothrow_t &) noexcept |
| void | operator delete (void *ptr, const std::nothrow_t &) noexcept |
| CHMTSLAM () | |
| Default constructor. More... | |
| CHMTSLAM (const CHMTSLAM &) | |
| const CHMTSLAM & | operator= (const CHMTSLAM &) |
| virtual | ~CHMTSLAM () |
| Destructor. More... | |
| bool | abortedDueToErrors () |
| Return true if an exception has been caught in any thread leading to the end of the mapping application: no more actions/observations will be processed from now on. More... | |
| void | generateLogFiles (unsigned int nIteration) |
| Called from LSLAM thread when log files must be created. More... | |
| void | getAs3DScene (mrpt::opengl::COpenGLScene &outScene) |
| Gets a 3D representation of the current state of the whole mapping framework. More... | |
| virtual mxArray * | writeToMatlab () const |
Introduces a pure virtual method responsible for writing to a mxArray Matlab object, typically a MATLAB struct whose contents are documented in each derived class. More... | |
High-level map management | |
| void | loadOptions (const std::string &configFile) |
| Loads the options from a config file. More... | |
| void | loadOptions (const mrpt::utils::CConfigFileBase &cfgSource) |
| Loads the options from a config source. More... | |
| void | initializeEmptyMap () |
| Initializes the whole HMT-SLAM framework, reseting to an empty map (It also clears the logs directory) - this must be called AFTER loading the options with CHMTSLAM::loadOptions. More... | |
| bool | saveState (mrpt::utils::CStream &out) const |
| Save the state of the whole HMT-SLAM framework to some binary stream (e.g. More... | |
| bool | loadState (mrpt::utils::CStream &in) |
| Load the state of the whole HMT-SLAM framework from some binary stream (e.g. More... | |
RTTI classes and functions | |
| mrpt::utils::CObject::Ptr | duplicateGetSmartPtr () const |
| Returns a copy of the object, indepently of its class, as a smart pointer (the newly created object will exist as long as any copy of this smart pointer). More... | |
Static Public Member Functions | |
| static void * | operator new (size_t size, void *ptr) |
Public Attributes | |
The important data. | |
| CHierarchicalMHMap | m_map |
| The hiearchical, multi-hypothesis graph-based map. More... | |
| aligned_containers< THypothesisID, CLocalMetricHypothesis >::map_t | m_LMHs |
| The list of LMHs at each instant. More... | |
Protected Member Functions | |
CSerializable virtual methods | |
| void | writeToStream (mrpt::utils::CStream &out, int *getVersion) const override |
| Introduces a pure virtual method responsible for writing to a CStream. More... | |
| void | readFromStream (mrpt::utils::CStream &in, int version) override |
| Introduces a pure virtual method responsible for loading from a CStream This can not be used directly be users, instead use "stream >> object;" for reading it from a stream or "stream >> object_ptr;" if the class is unknown apriori. More... | |
HMT-SLAM sub-processes. | |
| void | LSLAM_process_message (const mrpt::utils::CMessage &msg) |
| Auxiliary method within thread_LSLAM. More... | |
| void | LSLAM_process_message_from_AA (const TMessageLSLAMfromAA &myMsg) |
| No critical section locks are assumed at the entrance of this method. More... | |
| void | LSLAM_process_message_from_TBI (const TMessageLSLAMfromTBI &myMsg) |
| No critical section locks are assumed at the entrance of this method. More... | |
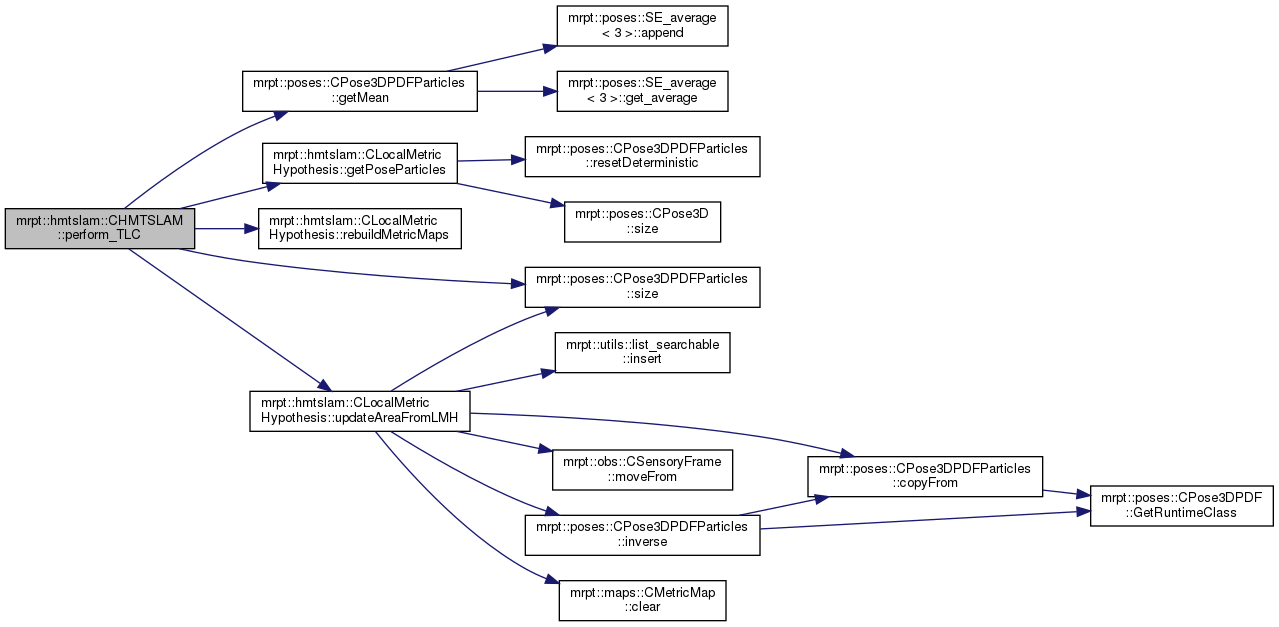
| void | perform_TLC (CLocalMetricHypothesis &LMH, const CHMHMapNode::TNodeID areaInLMH, const CHMHMapNode::TNodeID areaLoopClosure, const mrpt::poses::CPose3DPDFGaussian &pose1wrt2) |
| Topological Loop Closure: Performs all the required operations to close a loop between two areas which have been determined to be the same. More... | |
Static Protected Member Functions | |
| static TMessageLSLAMfromAA::Ptr | areaAbstraction (CLocalMetricHypothesis *LMH, const TPoseIDList &newPoseIDs) |
| The Area Abstraction (AA) method, invoked from LSLAM. More... | |
| static TMessageLSLAMfromTBI::Ptr | TBI_main_method (CLocalMetricHypothesis *LMH, const CHMHMapNode::TNodeID &areaID) |
| The entry point for Topological Bayesian Inference (TBI) engines, invoked from LSLAM. More... | |
| static std::string | generateUniqueAreaLabel () |
| Generates a new and unique area textual label (currently this generates "0","1",...) More... | |
| static TPoseID | generatePoseID () |
| Generates a new and unique pose ID. More... | |
| static THypothesisID | generateHypothesisID () |
| Generates a new and unique hypothesis ID. More... | |
Protected Attributes | |
| bool | m_terminateThreads |
| Termination flag for signaling all threads to terminate. More... | |
| bool | m_terminationFlag_LSLAM |
| Threads termination flags: More... | |
| bool | m_terminationFlag_TBI |
| bool | m_terminationFlag_3D_viewer |
| mrpt::hmtslam::CHMTSLAM::TOptions | m_options |
Inter-thread communication queues: | |
| utils::CMessageQueue | m_LSLAM_queue |
| LSLAM thread input queue, messages of type CHMTSLAM::TMessageLSLAMfromAA. More... | |
The different SLAM algorithms that can be invoked from the LSLAM | |
thread. | |
| CLSLAMAlgorithmBase * | m_LSLAM_method |
| An instance of a local SLAM method, to be applied to each LMH - initialized by "initializeEmptyMap" or "loadState". More... | |
Static Protected Attributes | |
| static int64_t | m_nextAreaLabel = 0 |
| static TPoseID | m_nextPoseID = 0 |
| static THypothesisID | m_nextHypID = COMMON_TOPOLOG_HYP + 1 |
Friends | |
| class | CLocalMetricHypothesis |
| class | CLSLAM_RBPF_2DLASER |
| class | CTopLCDetector_GridMatching |
| class | CTopLCDetector_FabMap |
RTTI stuff | |
| using | Ptr = std::shared_ptr< CHMTSLAM > |
| using | ConstPtr = std::shared_ptr< const CHMTSLAM > |
| static mrpt::utils::CLASSINIT | _init_CHMTSLAM |
| static const mrpt::utils::TRuntimeClassId | runtimeClassId |
| static constexpr const char * | className = "CHMTSLAM" |
| static const mrpt::utils::TRuntimeClassId * | _GetBaseClass () |
| static const mrpt::utils::TRuntimeClassId & | GetRuntimeClassIdStatic () |
| static mrpt::utils::CObject * | CreateObject () |
| template<typename... Args> | |
| static Ptr | Create (Args &&... args) |
| virtual const mrpt::utils::TRuntimeClassId * | GetRuntimeClass () const override |
| Returns information about the class of an object in runtime. More... | |
| virtual mrpt::utils::CObject * | clone () const override |
| Returns a deep copy (clone) of the object, indepently of its class. More... | |
Related to the input queue: | |
| enum | TLSlamMethod { lsmRBPF_2DLASER = 1 } |
| std::queue< mrpt::utils::CSerializable::Ptr > | m_inputQueue |
| The queue of pending actions/observations supplied by the user waiting for being processed. More... | |
| std::mutex | m_inputQueue_cs |
| Critical section for accessing m_inputQueue. More... | |
| std::mutex | m_map_cs |
| Critical section for accessing m_map. More... | |
| std::mutex | m_LMHs_cs |
| Critical section for accessing m_LMHs. More... | |
| void | clearInputQueue () |
| Empty the input queue. More... | |
| bool | isInputQueueEmpty () |
| Returns true if the input queue is empty (Note that the queue must not be empty to the user to enqueue more actions/observaitions) More... | |
| size_t | inputQueueSize () |
| Returns the number of objects waiting for processing in the input queue. More... | |
| void | pushAction (const mrpt::obs::CActionCollection::Ptr &acts) |
| Here the user can enter an action into the system (will go to the SLAM process). More... | |
| void | pushObservations (const mrpt::obs::CSensoryFrame::Ptr &sf) |
| Here the user can enter observations into the system (will go to the SLAM process). More... | |
| void | pushObservation (const mrpt::obs::CObservation::Ptr &obs) |
| Here the user can enter an observation into the system (will go to the SLAM process). More... | |
| mrpt::utils::CSerializable::Ptr | getNextObjectFromInputQueue () |
| Used from the LSLAM thread to retrieve the next object from the queue. More... | |
Threads stuff | |
| std::thread | m_hThread_LSLAM |
| Threads handles. More... | |
| std::thread | m_hThread_TBI |
| std::thread | m_hThread_3D_viewer |
| void | thread_LSLAM () |
| The function for the "Local SLAM" thread. More... | |
| void | thread_TBI () |
| The function for the "TBI" thread. More... | |
| void | thread_3D_viewer () |
| The function for the "3D viewer" thread. More... | |
The different Loop-Closure modules that are to be executed in the | |
| typedef CTopLCDetectorBase *(* | TLopLCDetectorFactory) (CHMTSLAM *) |
| std::map< std::string, TLopLCDetectorFactory > | m_registeredLCDetectors |
| std::deque< CTopLCDetectorBase * > | m_topLCdets |
| The list of LC modules in operation - initialized by "initializeEmptyMap" or "loadState". More... | |
| std::mutex | m_topLCdets_cs |
| The critical section for accessing m_topLCdets. More... | |
| void | registerLoopClosureDetector (const std::string &name, CTopLCDetectorBase *(*ptrCreateObject)(CHMTSLAM *)) |
| Must be invoked before calling initializeEmptyMap, so LC objects can be created. More... | |
| CTopLCDetectorBase * | loopClosureDetector_factory (const std::string &name) |
| The class factory for topological loop closure detectors. More... | |
Member Typedef Documentation
◆ ConstPtr
| using mrpt::hmtslam::CHMTSLAM::ConstPtr = std::shared_ptr<const CHMTSLAM > |
Definition at line 73 of file CHMTSLAM.h.
◆ Ptr
| using mrpt::hmtslam::CHMTSLAM::Ptr = std::shared_ptr< CHMTSLAM > |
A typedef for the associated smart pointer
Definition at line 73 of file CHMTSLAM.h.
◆ TLopLCDetectorFactory
|
protected |
Definition at line 304 of file CHMTSLAM.h.
Member Enumeration Documentation
◆ TLSlamMethod
| Enumerator | |
|---|---|
| lsmRBPF_2DLASER | |
Definition at line 224 of file CHMTSLAM.h.
Constructor & Destructor Documentation
◆ CHMTSLAM() [1/2]
| CHMTSLAM::CHMTSLAM | ( | ) |
Default constructor.
- Parameters
-
debug_out_stream If debug output messages should be redirected to any other stream apart from std::cout
Definition at line 55 of file CHMTSLAM_main.cpp.
◆ CHMTSLAM() [2/2]
|
inline |
Definition at line 360 of file CHMTSLAM.h.
References THROW_EXCEPTION.
◆ ~CHMTSLAM()
|
virtual |
Destructor.
Definition at line 86 of file CHMTSLAM_main.cpp.
References mrpt::mrpt::format(), MRPT_LOG_DEBUG, and MRPT_LOG_WARN.

Member Function Documentation
◆ _GetBaseClass()
|
staticprotected |
◆ abortedDueToErrors()
| bool CHMTSLAM::abortedDueToErrors | ( | ) |
Return true if an exception has been caught in any thread leading to the end of the mapping application: no more actions/observations will be processed from now on.
Definition at line 547 of file CHMTSLAM_main.cpp.
◆ areaAbstraction()
|
staticprotected |
The Area Abstraction (AA) method, invoked from LSLAM.
- Parameters
-
LMH (IN) The LMH which to this query applies. newPoseIDs (IN) The new poseIDs to be added to the graph partitioner.
- Returns
- A structure with all return data. Memory to be freed by user.
- Note
- The critical section for LMH must be locked BEFORE calling this method (it does NOT lock any critical section).
Definition at line 33 of file CHMTSLAM_AA.cpp.
References mrpt::slam::CIncrementalMapPartitioner::addMapFrame(), ASSERT_, mrpt::hmtslam::CLocalMetricHypothesis::getPoseParticles(), mrpt::hmtslam::CLocalMetricHypothesis::TRobotPosesPartitioning::idx2pose, mrpt::hmtslam::CLocalMetricHypothesis::TRobotPosesPartitioning::lock, mrpt::hmtslam::CLocalMetricHypothesis::m_ID, mrpt::hmtslam::CLocalMetricHypothesis::m_parent, mrpt::hmtslam::CLocalMetricHypothesis::m_robotPosesGraph, mrpt::hmtslam::CLocalMetricHypothesis::m_SFs, mrpt::slam::CIncrementalMapPartitioner::markAllNodesForReconsideration(), MRPT_END, MRPT_START, mrpt::slam::CIncrementalMapPartitioner::options, mrpt::hmtslam::CLocalMetricHypothesis::TRobotPosesPartitioning::partitioner, and mrpt::slam::CIncrementalMapPartitioner::updatePartitions().

◆ clearInputQueue()
| void CHMTSLAM::clearInputQueue | ( | ) |
Empty the input queue.
Definition at line 156 of file CHMTSLAM_main.cpp.
◆ clone()
|
overridevirtual |
Returns a deep copy (clone) of the object, indepently of its class.
Implements mrpt::utils::CObject.
◆ Create()
|
inlinestatic |
Definition at line 73 of file CHMTSLAM.h.
◆ CreateObject()
|
static |
◆ generateHypothesisID()
|
staticprotected |
Generates a new and unique hypothesis ID.
Definition at line 535 of file CHMTSLAM_main.cpp.
◆ generateLogFiles()
| void CHMTSLAM::generateLogFiles | ( | unsigned int | nIteration | ) |
Called from LSLAM thread when log files must be created.
Definition at line 39 of file CHMTSLAM_LOG.cpp.
References ASSERT_, CFileGZOutputStream, mrpt::bayes::CProbabilityParticle< T >::d, mrpt::system::os::fclose(), mrpt::system::os::fopen(), mrpt::format(), mrpt::system::formatTimeInterval(), mrpt::system::os::fprintf(), mrpt::slam::CIncrementalMapPartitioner::getAdjacencyMatrix(), mrpt::hmtslam::CLocalMetricHypothesis::getAs3DScene(), mrpt::slam::CIncrementalMapPartitioner::getAs3DScene(), mrpt::system::getMemoryUsage(), mrpt::bayes::CParticleFilterData< T >::getMostLikelyParticle(), mrpt::hmtslam::CLocalMetricHypothesis::TRobotPosesPartitioning::idx2pose, mrpt::hmtslam::CLocalMetricHypothesis::TRobotPosesPartitioning::lock, mrpt::hmtslam::CLocalMetricHypothesis::m_ID, mrpt::hmtslam::CLocalMetricHypothesis::m_log_w, mrpt::hmtslam::CLocalMetricHypothesis::m_neighbors, mrpt::hmtslam::CLocalMetricHypothesis::m_poseParticles, mrpt::hmtslam::CLocalMetricHypothesis::m_robotPosesGraph, MRPT_END, MRPT_LOG_INFO_STREAM, MRPT_START, mrpt::hmtslam::CLocalMetricHypothesis::TRobotPosesPartitioning::partitioner, mrpt::utils::CImage::saveToFile(), mrpt::hmtslam::CLocalMetricHypothesis::threadLocks, mrpt::utils::CTicTac::Tic(), and mrpt::hmtslam::CLocalMetricHypothesis::updateAreaFromLMH().

◆ generatePoseID()
|
staticprotected |
Generates a new and unique pose ID.
Definition at line 531 of file CHMTSLAM_main.cpp.
Referenced by mrpt::hmtslam::CLSLAM_RBPF_2DLASER::processOneLMH().

◆ generateUniqueAreaLabel()
|
staticprotected |
Generates a new and unique area textual label (currently this generates "0","1",...)
Definition at line 523 of file CHMTSLAM_main.cpp.
References mrpt::format().

◆ getAs3DScene()
| void CHMTSLAM::getAs3DScene | ( | mrpt::opengl::COpenGLScene & | outScene | ) |
Gets a 3D representation of the current state of the whole mapping framework.
Definition at line 539 of file CHMTSLAM_main.cpp.
References MRPT_UNUSED_PARAM.
◆ getNextObjectFromInputQueue()
|
protected |
Used from the LSLAM thread to retrieve the next object from the queue.
- Returns
- The object, or nullptr if empty.
Definition at line 386 of file CHMTSLAM_main.cpp.
◆ GetRuntimeClass()
|
overridevirtual |
Returns information about the class of an object in runtime.
Reimplemented from mrpt::utils::CSerializable.
◆ GetRuntimeClassIdStatic()
|
static |
◆ initializeEmptyMap()
| void CHMTSLAM::initializeEmptyMap | ( | ) |
Initializes the whole HMT-SLAM framework, reseting to an empty map (It also clears the logs directory) - this must be called AFTER loading the options with CHMTSLAM::loadOptions.
Definition at line 404 of file CHMTSLAM_main.cpp.
References mrpt::hmtslam::CLocalMetricHypothesis::clearRobotPoses(), COMMON_TOPOLOG_HYP, mrpt::system::createDirectory(), mrpt::system::deleteFilesInDirectory(), mrpt::hmtslam::CLocalMetricHypothesis::m_currentRobotPose, mrpt::hmtslam::CLocalMetricHypothesis::m_ID, mrpt::hmtslam::CLocalMetricHypothesis::m_log_w, mrpt::hmtslam::CLocalMetricHypothesis::m_neighbors, mrpt::hmtslam::CLocalMetricHypothesis::m_parent, NODE_ANNOTATION_METRIC_MAPS, NODE_ANNOTATION_REF_POSEID, POSEID_INVALID, and THROW_EXCEPTION_FMT.

◆ inputQueueSize()
| size_t CHMTSLAM::inputQueueSize | ( | ) |
Returns the number of objects waiting for processing in the input queue.
- See also
- pushAction,pushObservations, isInputQueueEmpty
Definition at line 373 of file CHMTSLAM_main.cpp.
◆ isInputQueueEmpty()
| bool CHMTSLAM::isInputQueueEmpty | ( | ) |
Returns true if the input queue is empty (Note that the queue must not be empty to the user to enqueue more actions/observaitions)
- See also
- pushAction,pushObservations, inputQueueSize
Definition at line 359 of file CHMTSLAM_main.cpp.
◆ loadOptions() [1/2]
| void CHMTSLAM::loadOptions | ( | const std::string & | configFile | ) |
Loads the options from a config file.
Definition at line 253 of file CHMTSLAM_main.cpp.
References ASSERT_, and mrpt::system::fileExists().

◆ loadOptions() [2/2]
| void CHMTSLAM::loadOptions | ( | const mrpt::utils::CConfigFileBase & | cfgSource | ) |
Loads the options from a config source.
Definition at line 231 of file CHMTSLAM_main.cpp.
◆ loadState()
| bool CHMTSLAM::loadState | ( | mrpt::utils::CStream & | in | ) |
Load the state of the whole HMT-SLAM framework from some binary stream (e.g.
a file).
- Returns
- true if everything goes OK.
- See also
- saveState
Definition at line 597 of file CHMTSLAM_main.cpp.
◆ loopClosureDetector_factory()
| CTopLCDetectorBase * CHMTSLAM::loopClosureDetector_factory | ( | const std::string & | name | ) |
The class factory for topological loop closure detectors.
Possible values are enumerated in TOptions::TLC_detectors
- Exceptions
-
std::exception On unknown name.
Definition at line 565 of file CHMTSLAM_main.cpp.
References MRPT_END, MRPT_START, and THROW_EXCEPTION_FMT.
◆ LSLAM_process_message()
|
protected |
Auxiliary method within thread_LSLAM.
Definition at line 288 of file CHMTSLAM_LSLAM.cpp.
References MRPT_END, MRPT_START, and MRPT_UNUSED_PARAM.
◆ LSLAM_process_message_from_AA()
|
protected |
No critical section locks are assumed at the entrance of this method.
Definition at line 318 of file CHMTSLAM_LSLAM.cpp.
References ARC_ANNOTATION_DELTA, ARC_ANNOTATION_DELTA_SRC_POSEID, ARC_ANNOTATION_DELTA_TRG_POSEID, AREAID_INVALID, ASSERT_, begin(), mrpt::poses::CPose3DPDFGaussian::copyFrom(), mrpt::poses::CPose3DPDFGaussian::cov, DEG2RAD, mrpt::poses::CPose3D::distanceEuclidean6D(), mrpt::poses::CPoseOrPoint< DERIVEDCLASS >::distanceTo(), mrpt::opengl::COpenGLScene::enableFollowCamera(), mrpt::utils::erase_return_next(), mrpt::utils::list_searchable< T >::find(), for(), mrpt::format(), mrpt::poses::CPose3DPDFGaussian::getMean(), mrpt::hmtslam::CHMTSLAM::TMessageLSLAMfromAA::hypothesisID, mrpt::utils::list_searchable< T >::insert(), mrpt::opengl::COpenGLScene::insert(), mrpt::obs::CSensoryFrame::insert(), mrpt::obs::CSensoryFrame::insertObservationsInto(), mrpt::poses::CPose3DPDFGaussian::inverse(), mrpt::bayes::CParticleFilterData< T >::m_particles, mrpt::poses::CPose3DPDFGaussian::mean, MRPT_END, MRPT_LOG_DEBUG_STREAM, MRPT_START, NODE_ANNOTATION_METRIC_MAPS, NODE_ANNOTATION_POSES_GRAPH, NODE_ANNOTATION_REF_POSEID, mrpt::hmtslam::CHMTSLAM::TMessageLSLAMfromAA::partitions, mrpt::hmtslam::TPoseInfo::pdf, POSEID_INVALID, RAD2DEG, mrpt::hmtslam::TPoseInfo::sf, mrpt::math::square(), mrpt::utils::CTicTac::Tac(), THROW_EXCEPTION, THROW_EXCEPTION_FMT, mrpt::utils::CTicTac::Tic(), mrpt::poses::CPoseOrPoint< DERIVEDCLASS >::x(), mrpt::poses::CPoseOrPoint< DERIVEDCLASS >::y(), and mrpt::poses::CPose3D::yaw().

◆ LSLAM_process_message_from_TBI()
|
protected |
No critical section locks are assumed at the entrance of this method.
Definition at line 1938 of file CHMTSLAM_LSLAM.cpp.
References ASSERT_, mrpt::math::chi2inv(), mrpt::poses::CPose3DPDFGaussian::copyFrom(), mrpt::poses::CPose3DPDFGaussian::cov, mrpt::hmtslam::CHMTSLAM::TMessageLSLAMfromTBI::cur_area, DEG2RAD, mrpt::hmtslam::CHMTSLAM::TMessageLSLAMfromTBI::hypothesisID, mrpt::hmtslam::CHMTSLAM::TMessageLSLAMfromTBI::loopClosureData, mrpt::poses::CPose3DPDFGaussian::mahalanobisDistanceTo(), mrpt::poses::CPose3DPDFGaussian::mean, MRPT_END, MRPT_START, mrpt::system::pause(), RAD2DEG, mrpt::math::square(), mrpt::utils::CTicTac::Tac(), and mrpt::utils::CTicTac::Tic().

◆ operator delete() [1/3]
Definition at line 73 of file CHMTSLAM.h.
◆ operator delete() [2/3]
Definition at line 73 of file CHMTSLAM.h.
◆ operator delete() [3/3]
Definition at line 73 of file CHMTSLAM.h.
◆ operator delete[]()
Definition at line 73 of file CHMTSLAM.h.
◆ operator new() [1/3]
|
inline |
Definition at line 73 of file CHMTSLAM.h.
◆ operator new() [2/3]
Definition at line 73 of file CHMTSLAM.h.
◆ operator new() [3/3]
|
inlinenoexcept |
Definition at line 73 of file CHMTSLAM.h.
◆ operator new[]()
|
inline |
Definition at line 73 of file CHMTSLAM.h.
◆ operator=()
Definition at line 364 of file CHMTSLAM.h.
References THROW_EXCEPTION.
◆ perform_TLC()
|
protected |
Topological Loop Closure: Performs all the required operations to close a loop between two areas which have been determined to be the same.
Definition at line 35 of file CHMTSLAM_perform_TLC.cpp.
References ASSERT_, mrpt::poses::CPose3DPDFParticles::getMean(), mrpt::hmtslam::CLocalMetricHypothesis::getPoseParticles(), mrpt::hmtslam::CLocalMetricHypothesis::TRobotPosesPartitioning::lock, mrpt::hmtslam::CLocalMetricHypothesis::m_ID, mrpt::hmtslam::CLocalMetricHypothesis::m_neighbors, mrpt::hmtslam::CLocalMetricHypothesis::m_nodeIDmemberships, mrpt::bayes::CParticleFilterData< T >::m_particles, mrpt::hmtslam::CLocalMetricHypothesis::m_poseParticles, mrpt::hmtslam::CLocalMetricHypothesis::m_posesPendingAddPartitioner, mrpt::hmtslam::CLocalMetricHypothesis::m_robotPosesGraph, mrpt::hmtslam::CLocalMetricHypothesis::m_SFs, mrpt::poses::CPose3DPDFGaussian::mean, MRPT_END, MRPT_START, NODE_ANNOTATION_POSES_GRAPH, NODE_ANNOTATION_REF_POSEID, mrpt::hmtslam::TPoseInfo::pdf, mrpt::hmtslam::CLocalMetricHypothesis::rebuildMetricMaps(), mrpt::hmtslam::TPoseInfo::sf, mrpt::poses::CPose3DPDFParticles::size(), and mrpt::hmtslam::CLocalMetricHypothesis::updateAreaFromLMH().
◆ pushAction()
| void CHMTSLAM::pushAction | ( | const mrpt::obs::CActionCollection::Ptr & | acts | ) |
Here the user can enter an action into the system (will go to the SLAM process).
This class will delete the passed object when required, so DO NOT DELETE the passed object after calling this.
- See also
- pushObservations,pushObservation
Definition at line 173 of file CHMTSLAM_main.cpp.
◆ pushObservation()
| void CHMTSLAM::pushObservation | ( | const mrpt::obs::CObservation::Ptr & | obs | ) |
Here the user can enter an observation into the system (will go to the SLAM process).
This class will delete the passed object when required, so DO NOT DELETE the passed object after calling this.
- See also
- pushAction,pushObservation
Definition at line 209 of file CHMTSLAM_main.cpp.
◆ pushObservations()
| void CHMTSLAM::pushObservations | ( | const mrpt::obs::CSensoryFrame::Ptr & | sf | ) |
Here the user can enter observations into the system (will go to the SLAM process).
This class will delete the passed object when required, so DO NOT DELETE the passed object after calling this.
- See also
- pushAction,pushObservation
Definition at line 191 of file CHMTSLAM_main.cpp.
◆ readFromStream()
|
overrideprotectedvirtual |
Introduces a pure virtual method responsible for loading from a CStream This can not be used directly be users, instead use "stream >> object;" for reading it from a stream or "stream >> object_ptr;" if the class is unknown apriori.
- Parameters
-
in The input binary stream where the object data must read from. version The version of the object stored in the stream: use this version number in your code to know how to read the incoming data.
- Exceptions
-
std::exception On any error, see CStream::ReadBuffer
- See also
- CStream
Implements mrpt::utils::CSerializable.
Definition at line 613 of file CHMTSLAM_main.cpp.
References MRPT_THROW_UNKNOWN_SERIALIZATION_VERSION.
◆ registerLoopClosureDetector()
| void CHMTSLAM::registerLoopClosureDetector | ( | const std::string & | name, |
| CTopLCDetectorBase *(*)(CHMTSLAM *) | ptrCreateObject | ||
| ) |
Must be invoked before calling initializeEmptyMap, so LC objects can be created.
Definition at line 556 of file CHMTSLAM_main.cpp.
◆ saveState()
| bool CHMTSLAM::saveState | ( | mrpt::utils::CStream & | out | ) | const |
Save the state of the whole HMT-SLAM framework to some binary stream (e.g.
a file).
- Returns
- true if everything goes OK.
- See also
- loadState
Definition at line 581 of file CHMTSLAM_main.cpp.
Referenced by mrpt::hmtslam::CTopLCDetector_GridMatching::computeTopologicalObservationModel().

◆ TBI_main_method()
|
staticprotected |
The entry point for Topological Bayesian Inference (TBI) engines, invoked from LSLAM.
- Parameters
-
LMH (IN) The LMH which to this query applies. areaID (IN) The area ID to consider for potential loop-closures.
- Note
- The critical section for LMH must be locked BEFORE calling this method (it does NOT lock any critical section).
Definition at line 109 of file CHMTSLAM_TBI.cpp.
References mrpt::poses::CPose3DPDFSOG::appendFrom(), ASSERT_, mrpt::poses::CPose3DPDFSOG::clear(), mrpt::hmtslam::CHMTSLAM::TMessageLSLAMfromTBI::TBI_info::delta_new_cur, IS_CLASS, mrpt::hmtslam::CHMTSLAM::TMessageLSLAMfromTBI::TBI_info::log_lik, mrpt::hmtslam::CLocalMetricHypothesis::m_ID, mrpt::hmtslam::CLocalMetricHypothesis::m_neighbors, mrpt::hmtslam::CLocalMetricHypothesis::m_parent, MRPT_END, MRPT_START, and mrpt::hmtslam::CLocalMetricHypothesis::updateAreaFromLMH().

◆ thread_3D_viewer()
|
protected |
The function for the "3D viewer" thread.
Definition at line 31 of file CHMTSLAM_3D_viewer.cpp.
References MRPT_TODO.
◆ thread_LSLAM()
|
protected |
The function for the "Local SLAM" thread.
Definition at line 43 of file CHMTSLAM_LSLAM.cpp.
References ASSERT_, CLASS_ID, mrpt::random::getRandomGenerator(), MRPT_TODO, mrpt::random::CRandomGenerator::randomize(), mrpt::utils::CTicTac::Tac(), THROW_EXCEPTION, and mrpt::utils::CTicTac::Tic().

◆ thread_TBI()
|
protected |
The function for the "TBI" thread.
Definition at line 32 of file CHMTSLAM_TBI.cpp.
References mrpt::random::getRandomGenerator(), MRPT_TODO, and mrpt::random::CRandomGenerator::randomize().

◆ writeToMatlab()
|
inlinevirtualinherited |
Introduces a pure virtual method responsible for writing to a mxArray Matlab object, typically a MATLAB struct whose contents are documented in each derived class.
- Returns
- A new
mxArray(caller is responsible of memory freeing) or nullptr is class does not support conversion to MATLAB.
Definition at line 89 of file CSerializable.h.
◆ writeToStream()
|
overrideprotectedvirtual |
Introduces a pure virtual method responsible for writing to a CStream.
This can not be used directly be users, instead use "stream << object;" for writing it to a stream.
- Parameters
-
out The output binary stream where object must be dumped. getVersion If nullptr, the object must be dumped. If not, only the version of the object dump must be returned in this pointer. This enables the versioning of objects dumping and backward compatibility with previously stored data.
- Exceptions
-
std::exception On any error, see CStream::WriteBuffer
- See also
- CStream
Implements mrpt::utils::CSerializable.
Definition at line 656 of file CHMTSLAM_main.cpp.
Friends And Related Function Documentation
◆ CLocalMetricHypothesis
|
friend |
Definition at line 68 of file CHMTSLAM.h.
◆ CLSLAM_RBPF_2DLASER
|
friend |
Definition at line 69 of file CHMTSLAM.h.
◆ CTopLCDetector_FabMap
|
friend |
Definition at line 71 of file CHMTSLAM.h.
◆ CTopLCDetector_GridMatching
|
friend |
Definition at line 70 of file CHMTSLAM.h.
Member Data Documentation
◆ _init_CHMTSLAM
|
staticprotected |
Definition at line 73 of file CHMTSLAM.h.
◆ className
|
static |
Definition at line 73 of file CHMTSLAM.h.
◆ m_hThread_3D_viewer
|
protected |
Definition at line 262 of file CHMTSLAM.h.
◆ m_hThread_LSLAM
|
protected |
Threads handles.
Definition at line 262 of file CHMTSLAM.h.
◆ m_hThread_TBI
|
protected |
Definition at line 262 of file CHMTSLAM.h.
◆ m_inputQueue
|
protected |
The queue of pending actions/observations supplied by the user waiting for being processed.
Definition at line 237 of file CHMTSLAM.h.
◆ m_inputQueue_cs
|
mutableprotected |
Critical section for accessing m_inputQueue.
Definition at line 240 of file CHMTSLAM.h.
◆ m_LMHs
| aligned_containers<THypothesisID, CLocalMetricHypothesis>::map_t mrpt::hmtslam::CHMTSLAM::m_LMHs |
The list of LMHs at each instant.
Definition at line 412 of file CHMTSLAM.h.
◆ m_LMHs_cs
|
mutableprotected |
Critical section for accessing m_LMHs.
Definition at line 246 of file CHMTSLAM.h.
◆ m_LSLAM_method
|
protected |
An instance of a local SLAM method, to be applied to each LMH - initialized by "initializeEmptyMap" or "loadState".
Definition at line 296 of file CHMTSLAM.h.
◆ m_LSLAM_queue
|
protected |
LSLAM thread input queue, messages of type CHMTSLAM::TMessageLSLAMfromAA.
Definition at line 158 of file CHMTSLAM.h.
◆ m_map
| CHierarchicalMHMap mrpt::hmtslam::CHMTSLAM::m_map |
The hiearchical, multi-hypothesis graph-based map.
Definition at line 410 of file CHMTSLAM.h.
◆ m_map_cs
|
mutableprotected |
Critical section for accessing m_map.
Definition at line 243 of file CHMTSLAM.h.
◆ m_nextAreaLabel
|
staticprotected |
Definition at line 349 of file CHMTSLAM.h.
◆ m_nextHypID
|
staticprotected |
Definition at line 351 of file CHMTSLAM.h.
◆ m_nextPoseID
|
staticprotected |
Definition at line 350 of file CHMTSLAM.h.
◆ m_options
|
protected |
◆ m_registeredLCDetectors
|
protected |
Definition at line 306 of file CHMTSLAM.h.
◆ m_terminateThreads
|
protected |
Termination flag for signaling all threads to terminate.
Definition at line 332 of file CHMTSLAM.h.
◆ m_terminationFlag_3D_viewer
|
protected |
Definition at line 336 of file CHMTSLAM.h.
◆ m_terminationFlag_LSLAM
|
protected |
Threads termination flags:
Definition at line 336 of file CHMTSLAM.h.
◆ m_terminationFlag_TBI
|
protected |
Definition at line 336 of file CHMTSLAM.h.
◆ m_topLCdets
|
protected |
The list of LC modules in operation - initialized by "initializeEmptyMap" or "loadState".
Definition at line 310 of file CHMTSLAM.h.
◆ m_topLCdets_cs
|
protected |
The critical section for accessing m_topLCdets.
Definition at line 313 of file CHMTSLAM.h.
◆ runtimeClassId
|
staticprotected |
Definition at line 73 of file CHMTSLAM.h.