class mrpt::obs::CObservationStereoImages
Overview
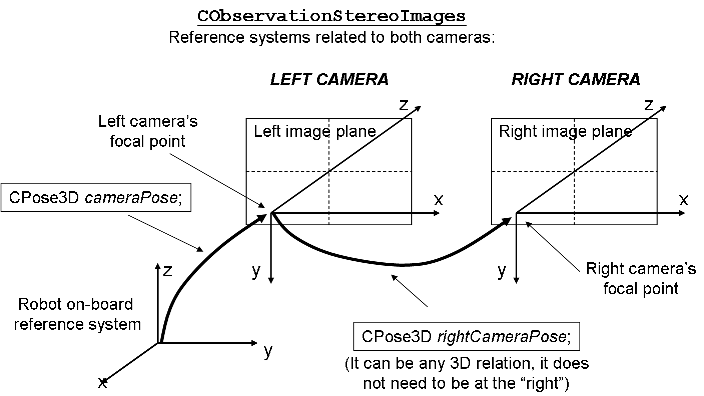
Observation class for either a pair of left+right or left+disparity images from a stereo camera.
To find whether the observation contains a right image and/or a disparity image, see the fields hasImageDisparity and hasImageRight, respectively. This figure illustrates the coordinate frames involved in this class:
The images stored in this class can be raw or undistorted images. In the latter case, the “distortion” params of the corresponding “leftCamera” and “rightCamera” fields should be all zeros.
See also:
#include <mrpt/obs/CObservationStereoImages.h> class CObservationStereoImages: public mrpt::obs::CObservation { public: // typedefs typedef std::shared_ptr<mrpt::obs ::CObservationStereoImages> Ptr; typedef std::shared_ptr<const mrpt::obs ::CObservationStereoImages> ConstPtr; typedef std::unique_ptr<mrpt::obs ::CObservationStereoImages> UniquePtr; typedef std::unique_ptr<const mrpt::obs ::CObservationStereoImages> ConstUniquePtr; // fields static constexpr const char* className = "mrpt::obs" "::" "CObservationStereoImages"; mrpt::img::CImage imageLeft; mrpt::img::CImage imageRight; mrpt::img::CImage imageDisparity; bool hasImageDisparity {false}; bool hasImageRight {false}; mrpt::img::TCamera leftCamera; mrpt::img::TCamera rightCamera; mrpt::poses::CPose3DQuat cameraPose; mrpt::poses::CPose3DQuat rightCameraPose; // construction CObservationStereoImages(); // methods static constexpr auto getClassName(); static const mrpt::rtti::TRuntimeClassId& GetRuntimeClassIdStatic(); static std::shared_ptr<CObject> CreateObject(); template <typename... Args> static Ptr Create(Args&&... args); template <typename Alloc, typename... Args> static Ptr CreateAlloc( const Alloc& alloc, Args&&... args ); template <typename... Args> static UniquePtr CreateUnique(Args&&... args); virtual const mrpt::rtti::TRuntimeClassId* GetRuntimeClass() const; virtual mrpt::rtti::CObject* clone() const; void getStereoCameraParams(mrpt::img::TStereoCamera& out_params) const; mrpt::img::TStereoCamera getStereoCameraParams() const; void setStereoCameraParams(const mrpt::img::TStereoCamera& in_params); bool areImagesRectified() const; virtual mrpt::poses::CPose3D getSensorPose() const; virtual void setSensorPose(const mrpt::poses::CPose3D& newSensorPose); virtual void getDescriptionAsText(std::ostream& o) const; void swap(CObservationStereoImages& o); virtual void load_impl() const; };
Inherited Members
public: // typedefs typedef std::shared_ptr<CObject> Ptr; typedef std::shared_ptr<const CObject> ConstPtr; typedef std::shared_ptr<CSerializable> Ptr; typedef std::shared_ptr<const CSerializable> ConstPtr; typedef std::shared_ptr<CObservation> Ptr; typedef std::shared_ptr<const CObservation> ConstPtr; // fields mrpt::system::TTimeStamp timestamp {mrpt::Clock::now()}; std::string sensorLabel; // methods static const mrpt::rtti::TRuntimeClassId& GetRuntimeClassIdStatic(); virtual const mrpt::rtti::TRuntimeClassId* GetRuntimeClass() const; virtual const mrpt::rtti::TRuntimeClassId* GetRuntimeClass() const; static const mrpt::rtti::TRuntimeClassId& GetRuntimeClassIdStatic(); virtual const mrpt::rtti::TRuntimeClassId* GetRuntimeClass() const; static const mrpt::rtti::TRuntimeClassId& GetRuntimeClassIdStatic(); mrpt::system::TTimeStamp getTimeStamp() const; virtual mrpt::system::TTimeStamp getOriginalReceivedTimeStamp() const; void load() const; virtual void unload() const; virtual bool exportTxtSupported() const; virtual std::string exportTxtHeader() const; virtual std::string exportTxtDataRow() const; template <class METRICMAP> bool insertObservationInto( METRICMAP& theMap, const std::optional<const mrpt::poses::CPose3D>& robotPose = std::nullopt ) const; virtual mrpt::poses::CPose3D getSensorPose() const = 0; void getSensorPose(mrpt::poses::CPose3D& out_sensorPose) const; void getSensorPose(mrpt::math::TPose3D& out_sensorPose) const; mrpt::math::TPose3D sensorPose() const; virtual void setSensorPose(const mrpt::poses::CPose3D& newSensorPose) = 0; void setSensorPose(const mrpt::math::TPose3D& newSensorPose); virtual void getDescriptionAsText(std::ostream& o) const; virtual std::string asString() const;
Typedefs
typedef std::shared_ptr<mrpt::obs ::CObservationStereoImages> Ptr
A type for the associated smart pointer.
Fields
mrpt::img::CImage imageLeft
Image from the left camera (this image will be ALWAYS present)
See also:
mrpt::img::CImage imageRight
Image from the right camera, only contains a valid image if hasImageRight == true.
See also:
mrpt::img::CImage imageDisparity
Disparity image, only contains a valid image if hasImageDisparity == true.
The relation between the actual disparity and pixels and each value in this image is… ???????????
bool hasImageDisparity {false}
Whether imageDisparity actually contains data (Default upon construction: false)
bool hasImageRight {false}
Whether imageRight actually contains data (Default upon construction: true)
mrpt::img::TCamera leftCamera
Parameters for the left/right cameras: individual intrinsic and distortion parameters of the cameras.
See the tutorial for a discussion of these parameters.
See also:
areImagesRectified(), getStereoCameraParams()
mrpt::poses::CPose3DQuat cameraPose
The pose of the LEFT camera, relative to the robot.
mrpt::poses::CPose3DQuat rightCameraPose
The pose of the right camera, relative to the left one: Note that using the conventional reference coordinates for the left camera (x points to the right, y down), the “right” camera is situated at position (BL, 0, 0) with yaw=pitch=roll=0, where BL is the BASELINE.
Methods
virtual const mrpt::rtti::TRuntimeClassId* GetRuntimeClass() const
Returns information about the class of an object in runtime.
virtual mrpt::rtti::CObject* clone() const
Returns a deep copy (clone) of the object, indepently of its class.
void getStereoCameraParams(mrpt::img::TStereoCamera& out_params) const
Populates a TStereoCamera structure with the parameters in leftCamera, rightCamera and rightCameraPose.
See also:
void setStereoCameraParams(const mrpt::img::TStereoCamera& in_params)
Sets leftCamera, rightCamera and rightCameraPose from a TStereoCamera structure.
bool areImagesRectified() const
This method only checks whether ALL the distortion parameters in leftCamera are set to zero, which is the convention in MRPT to denote that this pair of stereo images has been rectified.
virtual mrpt::poses::CPose3D getSensorPose() const
A general method to retrieve the sensor pose on the robot.
Note that most sensors will return a full (6D) CPose3D, but see the derived classes for more details or special cases.
See also:
setSensorPose A general method to retrieve the sensor pose on the robot, returning it by value.
virtual void setSensorPose(const mrpt::poses::CPose3D& newSensorPose)
A general method to change the sensor pose on the robot.
Note that most sensors will use the full (6D) CPose3D, but see the derived classes for more details or special cases.
See also:
virtual void getDescriptionAsText(std::ostream& o) const
Build a detailed, multi-line textual description of the observation contents and dump it to the output stream.
If overried by derived classes, call base CObservation::getDescriptionAsText() first to show common information.
This is the text that appears in RawLogViewer when selecting an object in the dataset
void swap(CObservationStereoImages& o)
Do an efficient swap of all data members of this object with “o”.