Example: nav_circ_robot_path_planning
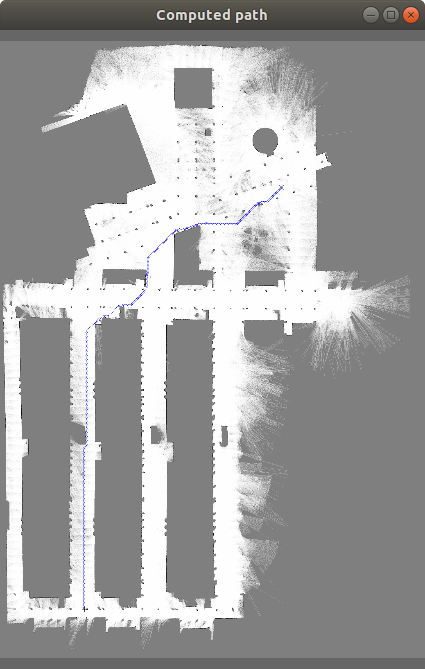
This example shows the use of the basic 2D path planning algorithm implemented in the mrpt-nav class PlannerSimple2D.
See also: [index of motion planning algorithms]()
C++ example source code:
/* _ | | Mobile Robot Programming Toolkit (MRPT) _ __ ___ _ __ _ __ | |_ | '_ ` _ \| '__| '_ \| __| https://www.mrpt.org/ | | | | | | | | |_) | |_ |_| |_| |_|_| | .__/ \__| https://github.com/MRPT/mrpt/ | | |_| Copyright (c) 2005-2026, Individual contributors, see AUTHORS file See: https://www.mrpt.org/Authors - All rights reserved. SPDX-License-Identifier: BSD-3-Clause */ #include <mrpt/gui/CDisplayWindow3D.h> #include <mrpt/io/CCompressedInputStream.h> #include <mrpt/maps/COccupancyGridMap2D.h> #include <mrpt/nav/planners/PlannerSimple2D.h> #include <mrpt/poses/CPose2D.h> #include <mrpt/serialization/CArchive.h> #include <mrpt/system/CTicTac.h> #include <mrpt/system/filesystem.h> #include <iostream> using namespace mrpt; using namespace mrpt::maps; using namespace mrpt::nav; using namespace mrpt::serialization; using namespace mrpt::img; using namespace mrpt::math; using namespace mrpt::poses; using namespace mrpt::io; using namespace mrpt::system; using namespace std; const std::string myGridMap = std::string(MRPT_EXAMPLE_DATA_DIR) + "/datasets/2006-MalagaCampus.gridmap.gz"; // ------------------------------------------------------ // TestPathPlanning // ------------------------------------------------------ void TestPathPlanning() { // Load the gridmap: COccupancyGridMap2D gridmap; if (!mrpt::system::fileExists(myGridMap)) { THROW_EXCEPTION_FMT("Map file '%s' not found", myGridMap.c_str()); } printf("Loading gridmap..."); { CCompressedInputStream f(myGridMap); auto arch = archiveFrom(f); arch >> gridmap; } printf( "Done! %f x %f m\n", gridmap.getXMax() - gridmap.getXMin(), gridmap.getYMax() - gridmap.getYMin()); // Find path: PlannerSimple2D pathPlanning; pathPlanning.robotRadius = 0.30f; std::deque<TPoint2D> thePath; bool notFound; CTicTac tictac; CPose2D origin(20, -110, 0); CPose2D target(90, 40, 0); std::cout << "Origin: " << origin << "\n"; std::cout << "Target: " << target << "\n"; std::cout << "Searching path..."; cout.flush(); tictac.Tic(); pathPlanning.computePath(gridmap, origin, target, thePath, notFound); double t = tictac.Tac(); std::cout << "Done in " << t * 1000 << " ms" << "\n"; printf("Path found: %s\n", notFound ? "NO" : "YES"); printf("Path has %zu steps\n", thePath.size()); // Save result: CImage img; { mrpt::maps::COccupancyGridMap2D::TGetAsImageParams p; p.forceRGB = true; gridmap.getAsImage(img, p); } // Draw the path: // --------------------- int R = static_cast<int>(std::round(pathPlanning.robotRadius / gridmap.getResolution())); for (std::deque<TPoint2D>::const_iterator it = thePath.begin(); it != thePath.end(); ++it) img.drawCircle( {gridmap.x2idx(it->x), static_cast<int>(gridmap.getSizeY() - 1 - gridmap.y2idx(it->y))}, R, TColor(0, 0, 255)); img.drawMark( {gridmap.x2idx(origin.x()), static_cast<int>(gridmap.getSizeY() - 1 - gridmap.y2idx(origin.y()))}, TColor(0x20, 0x20, 0x20), '+', 10); img.drawMark( {gridmap.x2idx(target.x()), static_cast<int>(gridmap.getSizeY() - 1 - gridmap.y2idx(target.y()))}, TColor(0x50, 0x50, 0x50), 'x', 10); const std::string dest = "path_planning.png"; std::cout << "Saving output to: " << dest << "\n"; bool savedOk = img.saveToFile(dest); ASSERT_(savedOk); printf("Done\n"); #if MRPT_HAS_WXWIDGETS mrpt::gui::CDisplayWindow3D win("Computed path"); win.setImageView(img); win.repaint(); win.waitForKey(); #endif } int main([[maybe_unused]] int argc, [[maybe_unused]] char** argv) { try { TestPathPlanning(); return 0; } catch (exception& e) { std::cout << "MRPT exception caught: " << e.what() << "\n"; return -1; } catch (...) { printf("Another exception!!"); return -1; } }