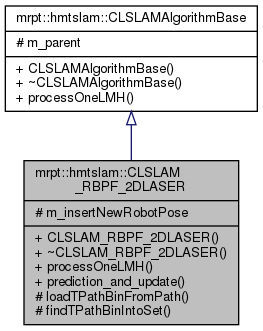
Detailed Description
Implements a 2D local SLAM method based on a RBPF over an occupancy grid map.
This class is used internally in mrpt::slam::CHMTSLAM
Definition at line 548 of file CHMTSLAM.h.
#include <mrpt/hmtslam/CHMTSLAM.h>
Classes | |
| struct | TPathBin |
| Auxiliary structure. More... | |
Public Member Functions | |
| CLSLAM_RBPF_2DLASER (CHMTSLAM *parent) | |
| Constructor. More... | |
| virtual | ~CLSLAM_RBPF_2DLASER () |
| Destructor. More... | |
| void | processOneLMH (CLocalMetricHypothesis *LMH, const mrpt::obs::CActionCollection::Ptr &act, const mrpt::obs::CSensoryFrame::Ptr &sf) |
| Main entry point from HMT-SLAM: process some actions & observations. More... | |
| template<class PF_ALGORITHM > | |
| void | prediction_and_update (CLocalMetricHypothesis *LMH, const mrpt::obs::CActionCollection *action, const mrpt::obs::CSensoryFrame *observation, const bayes::CParticleFilter::TParticleFilterOptions &PF_options) |
Protected Member Functions | |
| void | loadTPathBinFromPath (TPathBin &outBin, TMapPoseID2Pose3D *path=nullptr, mrpt::poses::CPose2D *newPose=nullptr) |
| Fills out a "TPathBin" variable, given a path hypotesis and (if not set to nullptr) a new pose appended at the end, using the KLD params in "options". More... | |
| int | findTPathBinIntoSet (TPathBin &desiredBin, std::deque< TPathBin > &theSet) |
| Checks if a given "TPathBin" element is already into a set of them, and return its index (first one is 0), or -1 if not found. More... | |
Protected Attributes | |
| bool | m_insertNewRobotPose |
| For use within PF callback methods. More... | |
| mrpt::utils::safe_ptr< CHMTSLAM > | m_parent |
Friends | |
| class | CLocalMetricHypothesis |
Constructor & Destructor Documentation
◆ CLSLAM_RBPF_2DLASER()
| mrpt::hmtslam::CLSLAM_RBPF_2DLASER::CLSLAM_RBPF_2DLASER | ( | CHMTSLAM * | parent | ) |
Constructor.
Definition at line 88 of file CHMTSLAM_LSLAM_RBPF_2DLASER.cpp.
◆ ~CLSLAM_RBPF_2DLASER()
|
virtual |
Destructor.
Definition at line 93 of file CHMTSLAM_LSLAM_RBPF_2DLASER.cpp.
Member Function Documentation
◆ findTPathBinIntoSet()
|
protected |
Checks if a given "TPathBin" element is already into a set of them, and return its index (first one is 0), or -1 if not found.
Definition at line 808 of file CHMTSLAM_LSLAM_RBPF_2DLASER.cpp.
References mrpt::hmtslam::CLSLAM_RBPF_2DLASER::TPathBin::phi, mrpt::hmtslam::CLSLAM_RBPF_2DLASER::TPathBin::x, and mrpt::hmtslam::CLSLAM_RBPF_2DLASER::TPathBin::y.
◆ loadTPathBinFromPath()
|
protected |
Fills out a "TPathBin" variable, given a path hypotesis and (if not set to nullptr) a new pose appended at the end, using the KLD params in "options".
Definition at line 753 of file CHMTSLAM_LSLAM_RBPF_2DLASER.cpp.
References mrpt::hmtslam::CLSLAMAlgorithmBase::m_parent, mrpt::poses::CPose2D::phi(), mrpt::hmtslam::CLSLAM_RBPF_2DLASER::TPathBin::phi, mrpt::utils::round(), mrpt::poses::CPoseOrPoint< DERIVEDCLASS >::x(), mrpt::hmtslam::CLSLAM_RBPF_2DLASER::TPathBin::x, mrpt::poses::CPoseOrPoint< DERIVEDCLASS >::y(), and mrpt::hmtslam::CLSLAM_RBPF_2DLASER::TPathBin::y.

◆ prediction_and_update()
| void mrpt::hmtslam::CLSLAM_RBPF_2DLASER::prediction_and_update | ( | CLocalMetricHypothesis * | LMH, |
| const mrpt::obs::CActionCollection * | action, | ||
| const mrpt::obs::CSensoryFrame * | observation, | ||
| const bayes::CParticleFilter::TParticleFilterOptions & | PF_options | ||
| ) |
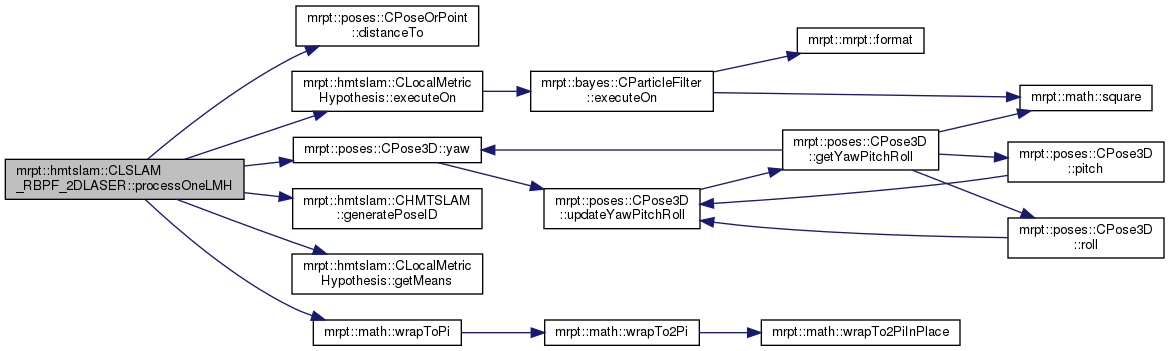
◆ processOneLMH()
|
virtual |
Main entry point from HMT-SLAM: process some actions & observations.
The passed action/observation will be deleted, so a copy must be made if necessary. This method must be in charge of updating the robot pose estimates and also to update the map when required.
- Parameters
-
LMH The local metric hypothesis which must be updated by this SLAM algorithm. act The action to process (or nullptr). sf The observations to process (or nullptr).
Implements mrpt::hmtslam::CLSLAMAlgorithmBase.
Definition at line 109 of file CHMTSLAM_LSLAM_RBPF_2DLASER.cpp.
References ASSERT_, mrpt::poses::CPoseOrPoint< DERIVEDCLASS >::distanceTo(), mrpt::hmtslam::CLocalMetricHypothesis::executeOn(), mrpt::hmtslam::CHMTSLAM::generatePoseID(), mrpt::hmtslam::CLocalMetricHypothesis::getMeans(), mrpt::hmtslam::CLocalMetricHypothesis::m_currentRobotPose, mrpt::hmtslam::CLocalMetricHypothesis::m_ID, m_insertNewRobotPose, mrpt::hmtslam::CLocalMetricHypothesis::m_nodeIDmemberships, mrpt::bayes::CParticleFilter::m_options, mrpt::hmtslam::CLSLAMAlgorithmBase::m_parent, mrpt::bayes::CParticleFilterData< T >::m_particles, mrpt::hmtslam::CLocalMetricHypothesis::m_poseParticles, mrpt::hmtslam::CLocalMetricHypothesis::m_posesPendingAddPartitioner, mrpt::hmtslam::CLocalMetricHypothesis::m_SFs, min, MRPT_END, MRPT_START, NODE_ANNOTATION_REF_POSEID, mrpt::bayes::CParticleFilter::TParticleFilterOptions::PF_algorithm, POSEID_INVALID, mrpt::math::wrapToPi(), and mrpt::poses::CPose3D::yaw().
Friends And Related Function Documentation
◆ CLocalMetricHypothesis
|
friend |
Definition at line 550 of file CHMTSLAM.h.
Member Data Documentation
◆ m_insertNewRobotPose
|
protected |
For use within PF callback methods.
Definition at line 586 of file CHMTSLAM.h.
Referenced by processOneLMH().
◆ m_parent
|
protectedinherited |
Definition at line 516 of file CHMTSLAM.h.
Referenced by loadTPathBinFromPath(), and processOneLMH().