Detailed Description
Classes for computer vision, detectors, features, etc.
mrpt_vision_grp
Namespaces | |
| detail | |
| pinhole | |
| Functions related to pinhole camera models, point projections, etc. | |
| pnp | |
| Perspective n Point (PnP) Algorithms toolkit for MRPT mrpt_vision_grp. | |
Classes | |
| class | CCamModel |
| This class represent a pinhole camera model for Monocular SLAM and implements some associated Jacobians. More... | |
| class | CDifodo |
| This abstract class implements a method called "Difodo" to perform Visual odometry with range cameras. More... | |
| class | CFeature |
| A generic 2D feature from an image, extracted with CFeatureExtraction Each feature may have one or more descriptors (see descriptors), in addition to an image patch. More... | |
| class | CFeatureList |
| A list of visual features, to be used as output by detectors, as input/output by trackers, etc. More... | |
| class | CMatchedFeatureList |
| A list of features. More... | |
| class | CFeatureExtraction |
| The central class from which images can be analyzed in search of different kinds of interest points and descriptors computed for them. More... | |
| struct | TImageCalibData |
| Data associated to each image in the calibration process mrpt::vision::checkerBoardCameraCalibration (All the information can be left empty and will be filled up in the calibration method). More... | |
| struct | TImageStereoCalibData |
| Data associated to each stereo image in the calibration process mrpt::vision::checkerBoardCameraCalibration (All the information can be left empty and will be filled up in the calibration method). More... | |
| struct | TImageStereoCallbackData |
| Params of the optional callback provided by the user. More... | |
| struct | TStereoCalibParams |
| Input parameters for mrpt::vision::checkerBoardStereoCalibration. More... | |
| struct | TStereoCalibResults |
| Output results for mrpt::vision::checkerBoardStereoCalibration. More... | |
| class | CImagePyramid |
| Holds and builds a pyramid of images: starting with an image at full resolution (octave=1), it builds a number of half-resolution images: octave=2 at 1/2 , octave=3 at 1/2^2, octave=N at 1/2^(N-1). More... | |
| class | CStereoRectifyMap |
| Use this class to rectify stereo images if the same distortion maps are reused over and over again. More... | |
| class | CUndistortMap |
| Use this class to undistort monocular images if the same distortion map is used over and over again. More... | |
| class | CVideoFileWriter |
| An output stream which takes a sequence of images and writes a video file in any of a given of compatible formats. More... | |
| struct | TSIFTDescriptorsKDTreeIndex |
| A kd-tree builder for sets of features with SIFT descriptors. More... | |
| struct | TSURFDescriptorsKDTreeIndex |
| A kd-tree builder for sets of features with SURF descriptors. More... | |
| struct | CGenericFeatureTracker |
| A virtual interface for all feature trackers, implementing the part of feature tracking that is common to any specific tracker implementation. More... | |
| struct | CFeatureTracker_KL |
| Track a set of features from old_img -> new_img using sparse optimal flow (classic KL method). More... | |
| struct | TSimpleFeature_templ |
| A simple structure for representing one image feature (without descriptor nor patch) - This is the template which allows you to select if pixels are represented as integers or floats. More... | |
| struct | TSimpleFeatureTraits |
| struct | TSimpleFeatureTraits< TSimpleFeature > |
| struct | TSimpleFeatureTraits< TSimpleFeaturef > |
| struct | TSimpleFeatureList_templ |
| A list of image features using the structure TSimpleFeature for each feature. More... | |
| struct | KeypointResponseSorter |
| A helper struct to sort keypoints by their response: It can be used with these types: More... | |
| class | CFeatureListKDTree |
| Helper class: KD-tree search class for vector<KeyPoint>: Call mark_as_outdated() to force rebuilding the kd-tree after modifying the linked feature list. More... | |
| struct | TFeatureObservation |
| One feature observation entry, used within sequences with TSequenceFeatureObservations. More... | |
| struct | TRelativeFeaturePos |
| One relative feature observation entry, used with some relative bundle-adjustment functions. More... | |
| struct | TSequenceFeatureObservations |
| A complete sequence of observations of features from different camera frames (poses). More... | |
| struct | TStereoSystemParams |
| Parameters associated to a stereo system. More... | |
| struct | TROI |
| A structure for storing a 3D ROI. More... | |
| struct | TImageROI |
| A structure for defining a ROI within an image. More... | |
| struct | TMatchingOptions |
| A structure containing options for the matching. More... | |
| struct | TMultiResMatchingOutput |
| Struct containing the output after matching multi-resolution SIFT-like descriptors. More... | |
| struct | TMultiResDescMatchOptions |
| Struct containing the options when matching multi-resolution SIFT-like descriptors. More... | |
| struct | TMultiResDescOptions |
| Struct containing the options when computing the multi-resolution SIFT-like descriptors. More... | |
| struct | JacData |
| struct | lm_stat_t |
| struct | TResidJacobElement |
| Data associated to each observation in the Lev-Marq. More... | |
Typedefs | |
| typedef std::map< std::string, TImageCalibData > | TCalibrationImageList |
| A list of images, used in checkerBoardCameraCalibration. More... | |
| typedef void(* | TSteroCalibCallbackFunctor) (const TImageStereoCallbackData &d, void *user_data) |
| Prototype of optional user callback function. More... | |
| typedef std::vector< TImageStereoCalibData > | TCalibrationStereoImageList |
| A list of images, used in checkerBoardStereoCalibration. More... | |
| typedef std::map< int, std::map< int, std::map< int, std::deque< std::pair< TFeatureID, double > > > > > | TQuantizationTable |
| typedef std::unique_ptr< CGenericFeatureTracker > | CGenericFeatureTrackerAutoPtr |
| typedef TSimpleFeature_templ< mrpt::utils::TPixelCoord > | TSimpleFeature |
| A simple structure for representing one image feature (without descriptor nor patch). More... | |
| typedef TSimpleFeature_templ< mrpt::utils::TPixelCoordf > | TSimpleFeaturef |
| A version of TSimpleFeature with subpixel precision. More... | |
| typedef TSimpleFeatureList_templ< TSimpleFeature > | TSimpleFeatureList |
| A list of image features using the structure TSimpleFeature for each feature. More... | |
| typedef TSimpleFeatureList_templ< TSimpleFeaturef > | TSimpleFeaturefList |
| A list of image features using the structure TSimpleFeaturef for each feature - capable of KD-tree computations. More... | |
| typedef uint64_t | TFeatureID |
| Definition of a feature ID. More... | |
| typedef uint64_t | TLandmarkID |
| Unique IDs for landmarks. More... | |
| typedef uint64_t | TCameraPoseID |
| Unique IDs for camera frames (poses) More... | |
| typedef mrpt::aligned_containers< TCameraPoseID, mrpt::poses::CPose3D >::map_t | TFramePosesMap |
| A list of camera frames (6D poses) indexed by unique IDs. More... | |
| typedef mrpt::aligned_containers< mrpt::poses::CPose3D >::vector_t | TFramePosesVec |
| A list of camera frames (6D poses), which assumes indexes are unique, consecutive IDs. More... | |
| typedef std::map< TLandmarkID, mrpt::math::TPoint3D > | TLandmarkLocationsMap |
| A list of landmarks (3D points) indexed by unique IDs. More... | |
| typedef std::vector< mrpt::math::TPoint3D > | TLandmarkLocationsVec |
| A list of landmarks (3D points), which assumes indexes are unique, consecutive IDs. More... | |
| typedef std::map< mrpt::vision::TFeatureID, TRelativeFeaturePos > | TRelativeFeaturePosMap |
| An index of feature IDs and their relative locations. More... | |
| typedef std::vector< mrpt::aligned_containers< TResidJacobElement >::vector_t > | TResidualJacobianList |
Enumerations | |
| enum | TListIdx { firstList = 0 , secondList , bothLists } |
| enum | TFeatureType { featNotDefined = -1 , featKLT = 0 , featHarris , featBCD , featSIFT , featSURF , featBeacon , featFAST , featFASTER9 , featFASTER10 , featFASTER12 , featORB , featAKAZE , featLSD } |
| Types of features - This means that the point has been detected with this algorithm, which is independent of additional descriptors a feature may also have. More... | |
| enum | TDescriptorType { descAny = 0 , descSIFT = 1 , descSURF = 2 , descSpinImages = 4 , descPolarImages = 8 , descLogPolarImages = 16 , descORB = 32 , descBLD = 64 , descLATCH = 128 } |
| The bitwise OR combination of values of TDescriptorType are used in CFeatureExtraction::computeDescriptors to indicate which descriptors are to be computed for features. More... | |
| enum | TFeatureTrackStatus { status_IDLE = 0 , status_TRACKED = 5 , status_OOB = 1 , status_LOST = 10 } |
Functions | |
| bool | checkerBoardCameraCalibration (TCalibrationImageList &images, unsigned int check_size_x, unsigned int check_size_y, double check_squares_length_X_meters, double check_squares_length_Y_meters, mrpt::utils::TCamera &out_camera_params, bool normalize_image=true, double *out_MSE=nullptr, bool skipDrawDetectedImgs=false, bool useScaramuzzaAlternativeDetector=false) |
| Performs a camera calibration (computation of projection and distortion parameters) from a sequence of captured images of a checkerboard. More... | |
| bool | checkerBoardCameraCalibration (TCalibrationImageList &images, unsigned int check_size_x, unsigned int check_size_y, double check_squares_length_X_meters, double check_squares_length_Y_meters, mrpt::math::CMatrixDouble33 &intrinsicParams, std::vector< double > &distortionParams, bool normalize_image=true, double *out_MSE=nullptr, bool skipDrawDetectedImgs=false, bool useScaramuzzaAlternativeDetector=false) |
| bool | findChessboardCorners (const mrpt::utils::CImage &img, std::vector< mrpt::utils::TPixelCoordf > &cornerCoords, unsigned int check_size_x, unsigned int check_size_y, bool normalize_image=true, bool useScaramuzzaMethod=false) |
| Look for the corners of a chessboard in the image using one of two different methods. More... | |
| void | findMultipleChessboardsCorners (const mrpt::utils::CImage &img, std::vector< std::vector< mrpt::utils::TPixelCoordf >> &cornerCoords, unsigned int check_size_x, unsigned int check_size_y) |
| Look for the corners of one or more chessboard/checkerboards in the image. More... | |
| bool | checkerBoardStereoCalibration (TCalibrationStereoImageList &images, const TStereoCalibParams ¶ms, TStereoCalibResults &out_results) |
| Optimize the calibration parameters of a stereo camera or a RGB+D (Kinect) camera. More... | |
| template<class DESCRIPTOR_KDTREE > | |
| size_t | find_descriptor_pairings (std::vector< vector_size_t > *pairings_1_to_multi_2, std::vector< std::pair< size_t, size_t >> *pairings_1_to_2, const CFeatureList &feats_img1, const DESCRIPTOR_KDTREE &feats_img2_kdtree, const mrpt::vision::TDescriptorType descriptor=descSIFT, const size_t max_neighbors=4, const double max_relative_distance=1.2, const typename DESCRIPTOR_KDTREE::kdtree_t::DistanceType max_distance=std::numeric_limits< typename DESCRIPTOR_KDTREE::kdtree_t::DistanceType >::max()) |
| Search for pairings between two sets of visual descriptors (for now, only SURF and SIFT features are considered). More... | |
| void | saveQTableToFile (const TQuantizationTable &qTable, const std::string &filename) |
| void | insertHashCoeffs (const CFeature::Ptr &feat, TQuantizationTable &qTable) |
| TMultiResMatchingOutput | relocalizeMultiDesc (const mrpt::utils::CImage &image, CFeatureList &baseList, CFeatureList ¤tList, TQuantizationTable &qTable, const TMultiResDescOptions &desc_opts, const TMultiResDescMatchOptions &match_opts) |
| void | updateBaseList (CFeatureList &baseList, const CFeatureList ¤tList, const std::vector< int > &idx) |
| void | checkScalesAndFindMore (CMatchedFeatureList &baseList, const CFeatureList ¤tList, const mrpt::utils::CImage ¤tImage, const TMultiResMatchingOutput &output, const TMultiResDescOptions &computeOpts, const TMultiResDescMatchOptions &matchOpts) |
| bool | computeGradient (const mrpt::utils::CImage &image, const unsigned int x, const unsigned int y, double &mag, double &ori) |
| Computes the gradient of certain pixel within the image. More... | |
| bool | computeMainOrientations (const mrpt::utils::CImage &image, const unsigned int x, const unsigned int y, const unsigned int patchSize, std::vector< double > &orientations, const double &sigma) |
| Computes the main orientations (within 80% of the peak value of orientation histogram) of a certain point within an image (for using in SIFT-based algorithms) More... | |
| void | interpolateHistEntry (std::vector< double > &hist, const double &cbin, const double &rbin, const double &obin, const double &mag, const int d, const int n) |
| Inserts the orientation value of a certain pixel within the keypoint neighbourhood into the histogram of orientations. More... | |
| void | computeHistogramOfOrientations (const mrpt::utils::CImage &image, const unsigned int x, const unsigned int y, const unsigned int patchSize, const double &orientation, std::vector< int32_t > &descriptor, const TMultiResDescOptions &opts, std::vector< int32_t > &hashCoeffs) |
| Computes the SIFT-like descriptor of a certain point within an image at the base scale, i.e. More... | |
| TMultiResMatchingOutput | matchMultiResolutionFeatures (const CFeatureList &list1, CFeatureList &list2, const mrpt::utils::CImage &rightImage, const TMultiResDescMatchOptions &matchOpts, const TMultiResDescOptions &computeOpts) |
| Matches two CFeatureList containing mulit-resolution descriptors. More... | |
| int | matchMultiResolutionFeatures (CMatchedFeatureList &mList1, CMatchedFeatureList &mList2, const mrpt::utils::CImage &leftImage, const mrpt::utils::CImage &rightImage, const TMultiResDescMatchOptions &matchOpts, const TMultiResDescOptions &computeOpts) |
| Matches two CMatchedFeatureList containing mulit-resolution descriptors. More... | |
| int | computeMoreDescriptors (const mrpt::utils::CImage &image, const CFeature::Ptr &inputFeat, CFeature::Ptr &outputFeat, const bool &lowerScales, const TMultiResDescOptions &opts) |
| Computes more multi-resolution SIFT-like descriptors for a feature using its position in a new image. More... | |
| void | setProperScales (const CFeature::Ptr &feat1, const CFeature::Ptr &feat2, int &firstScale, int &lastScale) |
| Computes the initial and final scales where to look when finding a match between multi-resolution features. More... | |
| void | computeMultiResolutionDescriptors (const mrpt::utils::CImage &imageLeft, const mrpt::utils::CImage &imageRight, CMatchedFeatureList &matchedFeats, const TMultiResDescOptions &opts) |
| Computes the multi-resolution SIFT-like descriptor of a set of matched features. More... | |
| bool | computeMultiResolutionDescriptors (const mrpt::utils::CImage &image, CFeature::Ptr &feat, const TMultiResDescOptions &opts) |
| Computes the multi-resolution SIFT-like descriptor of a features. More... | |
| std::vector< bool > | computeMultiResolutionDescriptors (const mrpt::utils::CImage &image, CFeatureList &list, const TMultiResDescOptions &opts) |
| Computes the multi-resolution SIFT-like descriptor of a list of features. More... | |
| void | computeMultiOrientations (const mrpt::utils::CImage &image, CFeatureList &list, const TMultiResDescOptions &opts) |
| Computes the multi-resolution SIFT-like descriptor of a list of features. More... | |
| void | checkTrackedFeatures (CFeatureList &leftList, CFeatureList &rightList, vision::TMatchingOptions options) |
| Search for correspondences which are not in the same row and deletes them ... More... | |
| void | filterBadCorrsByDistance (mrpt::utils::TMatchingPairList &list, unsigned int numberOfSigmas) |
| Filter bad correspondences by distance ... More... | |
| void | openCV_cross_correlation (const mrpt::utils::CImage &img, const mrpt::utils::CImage &patch_img, size_t &x_max, size_t &y_max, double &max_val, int x_search_ini=-1, int y_search_ini=-1, int x_search_size=-1, int y_search_size=-1) |
| Computes the correlation between this image and another one, encapsulating the openCV function cvMatchTemplate This implementation reduced computation time. More... | |
| void | flip (mrpt::utils::CImage &img) |
| Invert an image using OpenCV function. More... | |
| mrpt::math::TPoint3D | pixelTo3D (const mrpt::utils::TPixelCoordf &xy, const mrpt::math::CMatrixDouble33 &A) |
| Extract a UNITARY 3D vector in the direction of a 3D point, given from its (x,y) pixels coordinates, and the camera intrinsic coordinates. More... | |
| mrpt::math::CMatrixDouble33 | buildIntrinsicParamsMatrix (const double focalLengthX, const double focalLengthY, const double centerX, const double centerY) |
| Builds the intrinsic parameters matrix A from parameters: More... | |
| mrpt::math::CMatrixDouble33 | defaultIntrinsicParamsMatrix (unsigned int camIndex=0, unsigned int resolutionX=320, unsigned int resolutionY=240) |
| Returns the stored, default intrinsic params matrix for a given camera: More... | |
| void | deleteRepeatedFeats (CFeatureList &list) |
| Explore the feature list and removes features which are in the same coordinates. More... | |
| void | rowChecking (CFeatureList &leftList, CFeatureList &rightList, float threshold=1.0) |
| Search for correspondences which are not in the same row and deletes them. More... | |
| void | getDispersion (const CFeatureList &list, mrpt::math::CVectorFloat &std, mrpt::math::CVectorFloat &mean) |
| Computes the dispersion of the features in the image. More... | |
| double | computeMsd (const mrpt::utils::TMatchingPairList &list, const poses::CPose3D &Rt) |
| Computes the mean squared distance between a set of 3D correspondences ... More... | |
| void | cloudsToMatchedList (const mrpt::obs::CObservationVisualLandmarks &cloud1, const mrpt::obs::CObservationVisualLandmarks &cloud2, mrpt::utils::TMatchingPairList &outList) |
| Transform two clouds of 3D points into a matched list of points ... More... | |
| float | computeMainOrientation (const mrpt::utils::CImage &image, unsigned int x, unsigned int y) |
| Computes the main orientation of a set of points with an image (for using in SIFT-based algorithms) More... | |
| void | normalizeImage (const mrpt::utils::CImage &image, mrpt::utils::CImage &nimage) |
| Normalizes the brigthness and contrast of an image by setting its mean value to zero and its standard deviation to unit. More... | |
| size_t | matchFeatures (const CFeatureList &list1, const CFeatureList &list2, CMatchedFeatureList &matches, const TMatchingOptions &options=TMatchingOptions(), const TStereoSystemParams ¶ms=TStereoSystemParams()) |
| Find the matches between two lists of features which must be of the same type. More... | |
| void | generateMask (const CMatchedFeatureList &mList, mrpt::math::CMatrixBool &mask1, mrpt::math::CMatrixBool &mask2, int wSize=10) |
| Calculates the Sum of Absolutes Differences (range [0,1]) between two patches. More... | |
| double | computeSAD (const mrpt::utils::CImage &patch1, const mrpt::utils::CImage &patch2) |
| Calculates the Sum of Absolutes Differences (range [0,1]) between two patches. More... | |
| void | addFeaturesToImage (const mrpt::utils::CImage &inImg, const CFeatureList &theList, mrpt::utils::CImage &outImg) |
| Draw rectangles around each of the features on a copy of the input image. More... | |
| void | projectMatchedFeatures (const CMatchedFeatureList &matches, const mrpt::utils::TStereoCamera &stereo_camera, std::vector< mrpt::math::TPoint3D > &out_points) |
| void | projectMatchedFeatures (const CFeatureList &leftList, const CFeatureList &rightList, std::vector< mrpt::math::TPoint3D > &vP3D, const TStereoSystemParams ¶ms=TStereoSystemParams()) |
| Computes the 3D position of a set of matched features from their coordinates in the images. More... | |
| void | projectMatchedFeature (const CFeature::Ptr &leftFeat, const CFeature::Ptr &rightFeat, mrpt::math::TPoint3D &p3D, const TStereoSystemParams ¶ms=TStereoSystemParams()) |
| Computes the 3D position of a particular matched feature. More... | |
| void | projectMatchedFeatures (CMatchedFeatureList &mfList, const TStereoSystemParams ¶m, mrpt::maps::CLandmarksMap &landmarks) |
| Project a list of matched features into the 3D space, using the provided parameters of the stereo system. More... | |
| void | projectMatchedFeatures (CFeatureList &leftList, CFeatureList &rightList, const TStereoSystemParams ¶m, mrpt::maps::CLandmarksMap &landmarks) |
| Project a pair of feature lists into the 3D space, using the provided options for the stereo system. More... | |
| void | StereoObs2BRObs (const mrpt::obs::CObservationStereoImages &inObs, const std::vector< double > &sg, mrpt::obs::CObservationBearingRange &outObs) |
| Converts a stereo images observation into a bearing and range observation. More... | |
| void | StereoObs2BRObs (const CMatchedFeatureList &inMatches, const mrpt::math::CMatrixDouble33 &intrinsicParams, const double &baseline, const mrpt::poses::CPose3D &sensorPose, const std::vector< double > &sg, mrpt::obs::CObservationBearingRange &outObs) |
| Converts a matched feature list into a bearing and range observation (some of the stereo camera system must be provided). More... | |
| void | StereoObs2BRObs (const mrpt::obs::CObservationVisualLandmarks &inObs, mrpt::obs::CObservationBearingRange &outObs) |
| Converts a CObservationVisualLandmarks into a bearing and range observation (without any covariances). More... | |
| void | computeStereoRectificationMaps (const mrpt::utils::TCamera &cam1, const mrpt::utils::TCamera &cam2, const mrpt::poses::CPose3D &rightCameraPose, void *outMap1x, void *outMap1y, void *outMap2x, void *outMap2y) |
| Computes a pair of x-and-y maps for stereo rectification from a pair of cameras and the relative pose of the second one wrt the first one. More... | |
| template<bool POSES_ARE_INVERSE> | |
| void | frameJac (const mrpt::utils::TCamera &camera_params, const mrpt::poses::CPose3D &cam_pose, const mrpt::math::TPoint3D &landmark_global, mrpt::math::CMatrixFixedNumeric< double, 2, 6 > &out_J) |
The projective camera 2x6 Jacobian  (wrt the 6D camera pose) More... (wrt the 6D camera pose) More... | |
| template<bool POSES_ARE_INVERSE> | |
| void | pointJac (const mrpt::utils::TCamera &camera_params, const mrpt::poses::CPose3D &cam_pose, const mrpt::math::TPoint3D &landmark_global, mrpt::math::CMatrixFixedNumeric< double, 2, 3 > &out_J) |
| Jacobians wrt the point. More... | |
| template<bool POSES_ARE_INVERSE> | |
| void | ba_compute_Jacobians (const TFramePosesVec &frame_poses, const TLandmarkLocationsVec &landmark_points, const mrpt::utils::TCamera &camera_params, mrpt::aligned_containers< JacData< 6, 3, 2 >>::vector_t &jac_data_vec, const size_t num_fix_frames, const size_t num_fix_points) |
| void | ba_build_gradient_Hessians (const TSequenceFeatureObservations &observations, const std::vector< std::array< double, 2 >> &residual_vec, const mrpt::aligned_containers< JacData< 6, 3, 2 >>::vector_t &jac_data_vec, mrpt::aligned_containers< mrpt::math::CMatrixFixedNumeric< double, 6, 6 >>::vector_t &U, mrpt::aligned_containers< CArrayDouble< 6 >>::vector_t &eps_frame, mrpt::aligned_containers< mrpt::math::CMatrixFixedNumeric< double, 3, 3 >>::vector_t &V, mrpt::aligned_containers< CArrayDouble< 3 >>::vector_t &eps_point, const size_t num_fix_frames, const size_t num_fix_points, const vector< double > *kernel_1st_deriv) |
| Construct the BA linear system. More... | |
| double | recompute_errors_and_Jacobians (const lm_stat_t &lm_stat, TResidualJacobianList &res_jac, bool use_robust_kernel, double kernel_param) |
| void | build_linear_system (const TResidualJacobianList &res_jac, const vector_size_t &var_indxs, Eigen::VectorXd &minus_g, Eigen::MatrixXd &H) |
| void | add_lm_increment (const Eigen::VectorXd &eps, const vector_size_t &var_indxs, lm_stat_t &new_lm_stat) |
Bundle-Adjustment Auxiliary methods | |
| void | ba_initial_estimate (const mrpt::vision::TSequenceFeatureObservations &observations, const mrpt::utils::TCamera &camera_params, mrpt::vision::TFramePosesVec &frame_poses, mrpt::vision::TLandmarkLocationsVec &landmark_points) |
| Fills the frames & landmark points maps with an initial gross estimate from the sequence observations, so they can be fed to bundle adjustment methods. More... | |
| void | ba_initial_estimate (const mrpt::vision::TSequenceFeatureObservations &observations, const mrpt::utils::TCamera &camera_params, mrpt::vision::TFramePosesMap &frame_poses, mrpt::vision::TLandmarkLocationsMap &landmark_points) |
| This is an overloaded member function, provided for convenience. It differs from the above function only in what argument(s) it accepts. More... | |
| double | reprojectionResiduals (const mrpt::vision::TSequenceFeatureObservations &observations, const mrpt::utils::TCamera &camera_params, const mrpt::vision::TFramePosesVec &frame_poses, const mrpt::vision::TLandmarkLocationsVec &landmark_points, std::vector< std::array< double, 2 >> &out_residuals, const bool frame_poses_are_inverse, const bool use_robust_kernel=true, const double kernel_param=3.0, std::vector< double > *out_kernel_1st_deriv=nullptr) |
| Compute reprojection error vector (used from within Bundle Adjustment methods, but can be used in general) See mrpt::vision::bundle_adj_full for a description of most parameters. More... | |
| double | reprojectionResiduals (const mrpt::vision::TSequenceFeatureObservations &observations, const mrpt::utils::TCamera &camera_params, const mrpt::vision::TFramePosesMap &frame_poses, const mrpt::vision::TLandmarkLocationsMap &landmark_points, std::vector< std::array< double, 2 >> &out_residuals, const bool frame_poses_are_inverse, const bool use_robust_kernel=true, const double kernel_param=3.0, std::vector< double > *out_kernel_1st_deriv=nullptr) |
| This is an overloaded member function, provided for convenience. It differs from the above function only in what argument(s) it accepts. More... | |
| void | add_se3_deltas_to_frames (const mrpt::vision::TFramePosesVec &frame_poses, const mrpt::math::CVectorDouble &delta, const size_t delta_first_idx, const size_t delta_num_vals, mrpt::vision::TFramePosesVec &new_frame_poses, const size_t num_fix_frames) |
| For each pose in the vector frame_poses, adds a "delta" increment to the manifold, with the "delta" given in the se(3) Lie algebra: More... | |
| void | add_3d_deltas_to_points (const mrpt::vision::TLandmarkLocationsVec &landmark_points, const mrpt::math::CVectorDouble &delta, const size_t delta_first_idx, const size_t delta_num_vals, mrpt::vision::TLandmarkLocationsVec &new_landmark_points, const size_t num_fix_points) |
| For each pose in the vector frame_poses, adds a "delta" increment to the manifold, with the "delta" given in the se(3) Lie algebra: More... | |
Bundle-Adjustment methods | |
| using | TBundleAdjustmentFeedbackFunctor = std::function< void(const size_t cur_iter, const double cur_total_sq_error, const size_t max_iters, const mrpt::vision::TSequenceFeatureObservations &input_observations, const mrpt::vision::TFramePosesVec ¤t_frame_estimate, const mrpt::vision::TLandmarkLocationsVec ¤t_landmark_estimate)> |
| A functor type for BA methods. More... | |
| double | bundle_adj_full (const mrpt::vision::TSequenceFeatureObservations &observations, const mrpt::utils::TCamera &camera_params, mrpt::vision::TFramePosesVec &frame_poses, mrpt::vision::TLandmarkLocationsVec &landmark_points, const mrpt::utils::TParametersDouble &extra_params=mrpt::utils::TParametersDouble(), const mrpt::vision::TBundleAdjustmentFeedbackFunctor user_feedback=mrpt::vision::TBundleAdjustmentFeedbackFunctor()) |
| Sparse Levenberg-Marquart solution to bundle adjustment - optimizes all the camera frames & the landmark locations. More... | |
Typedef Documentation
◆ TBundleAdjustmentFeedbackFunctor
| using mrpt::vision::TBundleAdjustmentFeedbackFunctor = typedef std::function<void( const size_t cur_iter, const double cur_total_sq_error, const size_t max_iters, const mrpt::vision::TSequenceFeatureObservations& input_observations, const mrpt::vision::TFramePosesVec& current_frame_estimate, const mrpt::vision::TLandmarkLocationsVec& current_landmark_estimate)> |
A functor type for BA methods.
- See also
- bundle_adj_full
Definition at line 35 of file bundle_adjustment.h.
◆ TResidualJacobianList
| typedef std::vector<mrpt::aligned_containers<TResidJacobElement>::vector_t> mrpt::vision::TResidualJacobianList |
Definition at line 73 of file chessboard_stereo_camera_calib_internal.h.
Enumeration Type Documentation
◆ TListIdx
| Enumerator | |
|---|---|
| firstList | |
| secondList | |
| bothLists | |
Definition at line 26 of file CFeature.h.
Function Documentation
◆ add_lm_increment()
| void mrpt::vision::add_lm_increment | ( | const Eigen::VectorXd & | eps, |
| const vector_size_t & | var_indxs, | ||
| lm_stat_t & | new_lm_stat | ||
| ) |
Definition at line 868 of file chessboard_stereo_camera_calib.cpp.
References mrpt::poses::CPose3D::composeFrom(), eps, mrpt::vision::lm_stat_t::left_cam_params, mrpt::vision::lm_stat_t::left_cam_poses, mrpt::vision::lm_stat_t::right2left_pose, mrpt::vision::lm_stat_t::right_cam_params, and mrpt::vision::lm_stat_t::valid_image_pair_indices.
Referenced by checkerBoardStereoCalibration().


◆ ba_build_gradient_Hessians()
| void mrpt::vision::ba_build_gradient_Hessians | ( | const TSequenceFeatureObservations & | observations, |
| const std::vector< std::array< double, 2 >> & | residual_vec, | ||
| const mrpt::aligned_containers< JacData< 6, 3, 2 >>::vector_t & | jac_data_vec, | ||
| mrpt::aligned_containers< mrpt::math::CMatrixFixedNumeric< double, 6, 6 >>::vector_t & | U, | ||
| mrpt::aligned_containers< CArrayDouble< 6 >>::vector_t & | eps_frame, | ||
| mrpt::aligned_containers< mrpt::math::CMatrixFixedNumeric< double, 3, 3 >>::vector_t & | V, | ||
| mrpt::aligned_containers< CArrayDouble< 3 >>::vector_t & | eps_point, | ||
| const size_t | num_fix_frames, | ||
| const size_t | num_fix_points, | ||
| const vector< double > * | kernel_1st_deriv | ||
| ) |
Construct the BA linear system.
Set kernel_1st_deriv!=nullptr if using robust kernel.
Definition at line 238 of file ba_common.cpp.
References ASSERT_BELOW_, ASSERTDEB_, mrpt::vision::JacData< FrameDof, PointDof, ObsDim >::frame_id, mrpt::vision::TFeatureObservation::id_feature, mrpt::vision::TFeatureObservation::id_frame, mrpt::vision::JacData< FrameDof, PointDof, ObsDim >::J_frame, mrpt::vision::JacData< FrameDof, PointDof, ObsDim >::J_frame_valid, mrpt::vision::JacData< FrameDof, PointDof, ObsDim >::J_point, mrpt::vision::JacData< FrameDof, PointDof, ObsDim >::J_point_valid, MRPT_END, MRPT_START, mrpt::vision::JacData< FrameDof, PointDof, ObsDim >::point_id, and mrpt::math::UNINITIALIZED_MATRIX.
Referenced by bundle_adj_full().

◆ ba_compute_Jacobians()
| void mrpt::vision::ba_compute_Jacobians | ( | const TFramePosesVec & | frame_poses, |
| const TLandmarkLocationsVec & | landmark_points, | ||
| const mrpt::utils::TCamera & | camera_params, | ||
| mrpt::aligned_containers< JacData< 6, 3, 2 >>::vector_t & | jac_data_vec, | ||
| const size_t | num_fix_frames, | ||
| const size_t | num_fix_points | ||
| ) |
Definition at line 198 of file ba_internals.h.
References ASSERT_, ASSERTDEB_, mrpt::vision::JacData< FrameDof, PointDof, ObsDim >::frame_id, mrpt::vision::JacData< FrameDof, PointDof, ObsDim >::J_frame, mrpt::vision::JacData< FrameDof, PointDof, ObsDim >::J_frame_valid, mrpt::vision::JacData< FrameDof, PointDof, ObsDim >::J_point, mrpt::vision::JacData< FrameDof, PointDof, ObsDim >::J_point_valid, MRPT_END, MRPT_START, and mrpt::vision::JacData< FrameDof, PointDof, ObsDim >::point_id.
◆ build_linear_system()
| void mrpt::vision::build_linear_system | ( | const TResidualJacobianList & | res_jac, |
| const vector_size_t & | var_indxs, | ||
| Eigen::VectorXd & | minus_g, | ||
| Eigen::MatrixXd & | H | ||
| ) |
Definition at line 754 of file chessboard_stereo_camera_calib.cpp.
References mrpt::vision::TResidJacobElement::J, mrpt::system::pause(), and mrpt::vision::TResidJacobElement::residual.
Referenced by checkerBoardStereoCalibration().


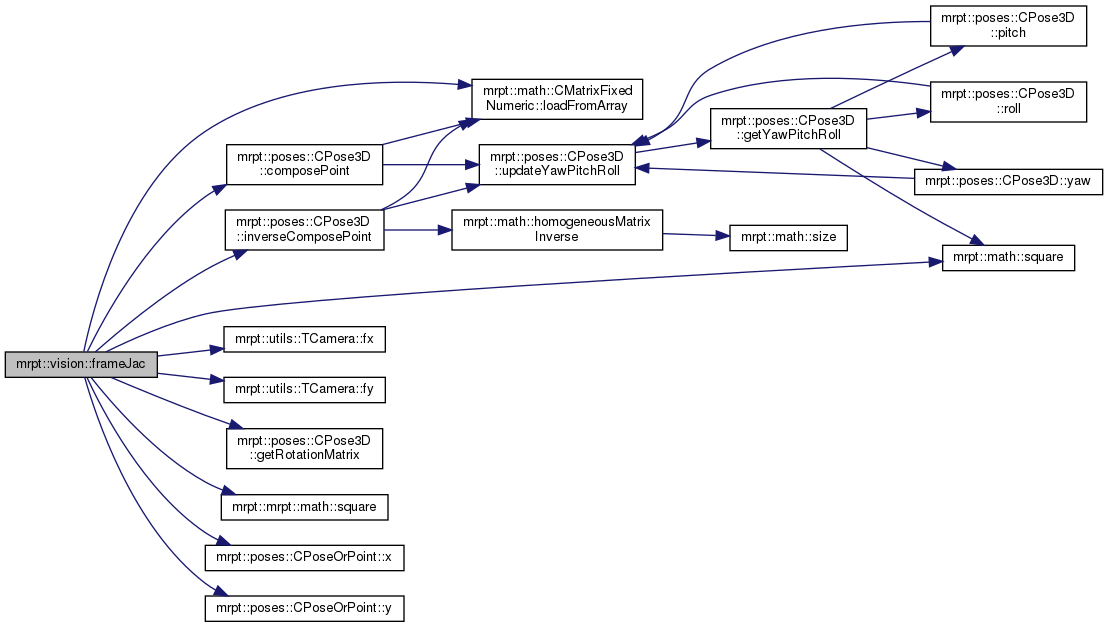
◆ frameJac()
| void mrpt::vision::frameJac | ( | const mrpt::utils::TCamera & | camera_params, |
| const mrpt::poses::CPose3D & | cam_pose, | ||
| const mrpt::math::TPoint3D & | landmark_global, | ||
| mrpt::math::CMatrixFixedNumeric< double, 2, 6 > & | out_J | ||
| ) |
The projective camera 2x6 Jacobian (wrt the 6D camera pose)
- Note
- Jacobians as described in http://www.mrpt.org/6D_poses:equivalences_compositions_and_uncertainty (Appendix A)
Definition at line 68 of file ba_internals.h.
References ASSERT_, mrpt::poses::CPose3D::composePoint(), mrpt::utils::TCamera::fx(), mrpt::utils::TCamera::fy(), mrpt::poses::CPose3D::getRotationMatrix(), mrpt::poses::CPose3D::inverseComposePoint(), mrpt::math::CMatrixFixedNumeric< T, NROWS, NCOLS >::loadFromArray(), R, mrpt::math::square(), mrpt::math::TPoint3D::x, mrpt::poses::CPoseOrPoint< DERIVEDCLASS >::x(), mrpt::math::TPoint3D::y, mrpt::poses::CPoseOrPoint< DERIVEDCLASS >::y(), and mrpt::math::TPoint3D::z.
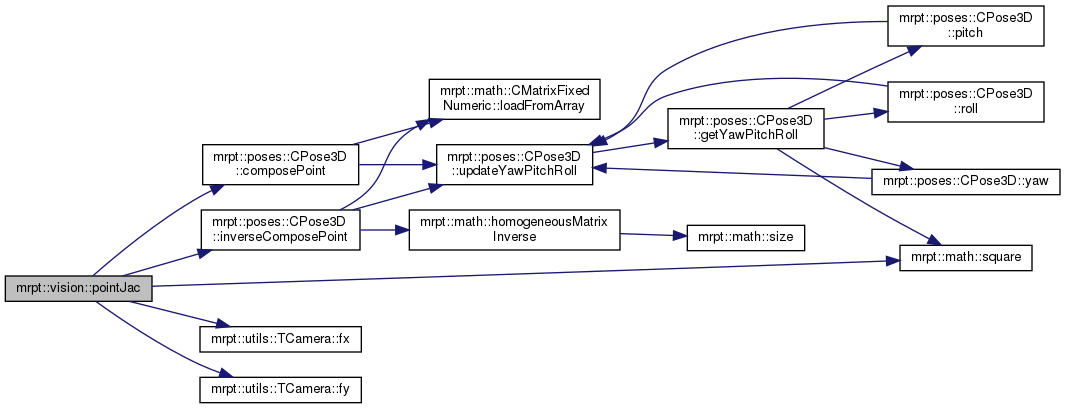
◆ pointJac()
| void mrpt::vision::pointJac | ( | const mrpt::utils::TCamera & | camera_params, |
| const mrpt::poses::CPose3D & | cam_pose, | ||
| const mrpt::math::TPoint3D & | landmark_global, | ||
| mrpt::math::CMatrixFixedNumeric< double, 2, 3 > & | out_J | ||
| ) |
Jacobians wrt the point.
- Note
- Jacobians as described in http://www.mrpt.org/6D_poses:equivalences_compositions_and_uncertainty (Appendix A)
Definition at line 157 of file ba_internals.h.
References ASSERT_, mrpt::poses::CPose3D::composePoint(), mrpt::utils::TCamera::fx(), mrpt::utils::TCamera::fy(), mrpt::poses::CPose3D::inverseComposePoint(), mrpt::math::square(), mrpt::math::UNINITIALIZED_MATRIX, mrpt::math::TPoint3D::x, mrpt::math::TPoint3D::y, and mrpt::math::TPoint3D::z.
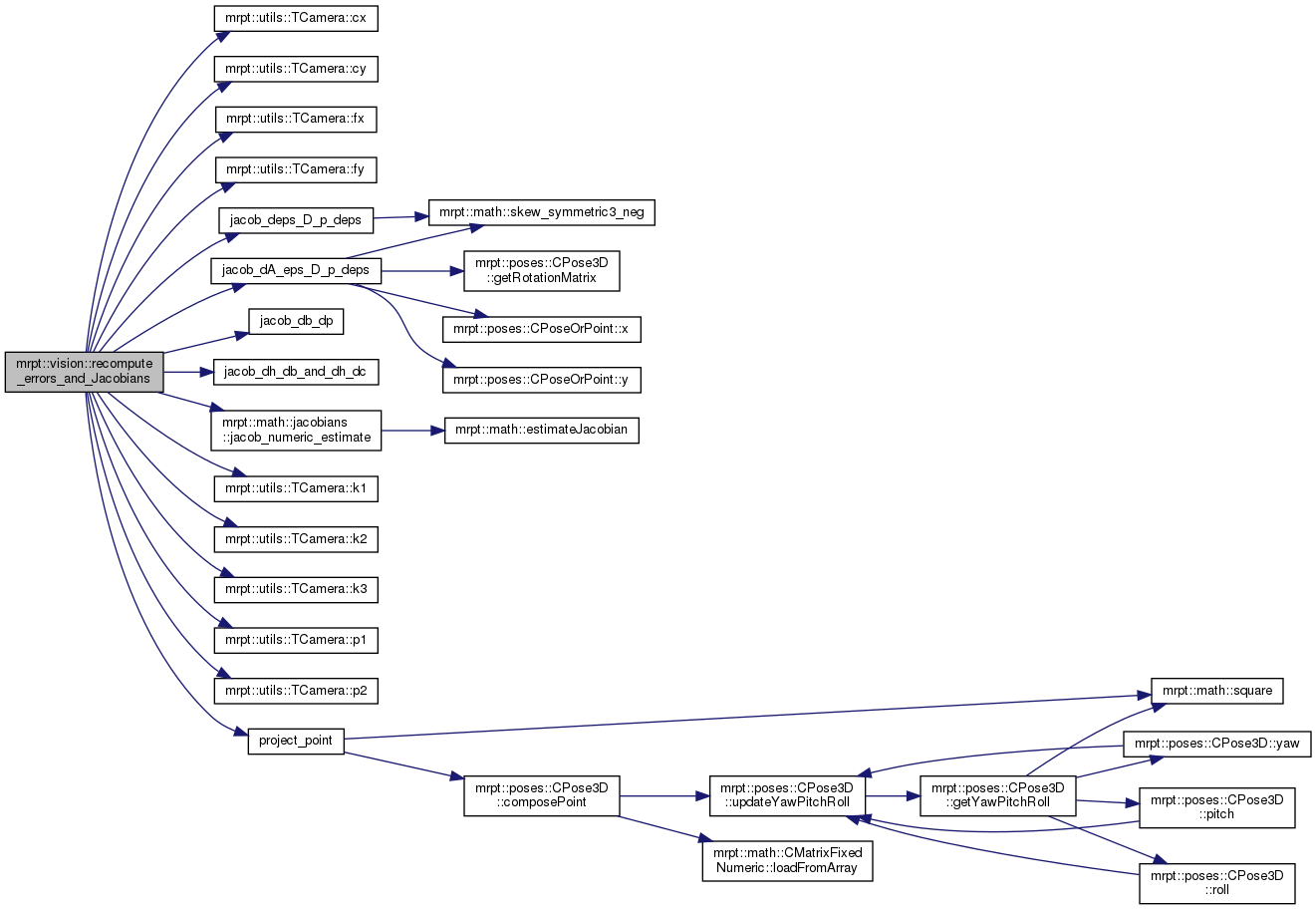
◆ recompute_errors_and_Jacobians()
| double mrpt::vision::recompute_errors_and_Jacobians | ( | const lm_stat_t & | lm_stat, |
| TResidualJacobianList & | res_jac, | ||
| bool | use_robust_kernel, | ||
| double | kernel_param | ||
| ) |
Definition at line 1046 of file chessboard_stereo_camera_calib.cpp.
References mrpt::utils::TCamera::cx(), mrpt::utils::TCamera::cy(), mrpt::utils::TCamera::fx(), mrpt::utils::TCamera::fy(), mrpt::vision::lm_stat_t::images, mrpt::vision::TResidJacobElement::J, jacob_dA_eps_D_p_deps(), jacob_db_dp(), jacob_deps_D_p_deps(), jacob_dh_db_and_dh_dc(), mrpt::math::jacobians::jacob_numeric_estimate(), mrpt::utils::TCamera::k1(), mrpt::utils::TCamera::k2(), mrpt::utils::TCamera::k3(), mrpt::vision::lm_stat_t::left_cam_params, mrpt::vision::lm_stat_t::left_cam_poses, mrpt::vision::lm_stat_t::obj_points, mrpt::utils::TCamera::p1(), mrpt::utils::TCamera::p2(), mrpt::vision::TResidJacobElement::predicted_obs, project_point(), mrpt::vision::TResidJacobElement::residual, mrpt::vision::lm_stat_t::right2left_pose, mrpt::vision::lm_stat_t::right_cam_params, mrpt::vision::lm_stat_t::valid_image_pair_indices, mrpt::math::TPoint3D::x, mrpt::utils::TPixelCoordf::x, mrpt::math::TPoint3D::y, mrpt::utils::TPixelCoordf::y, and mrpt::math::TPoint3D::z.
Referenced by checkerBoardStereoCalibration().