class mrpt::obs::CObservationImage¶
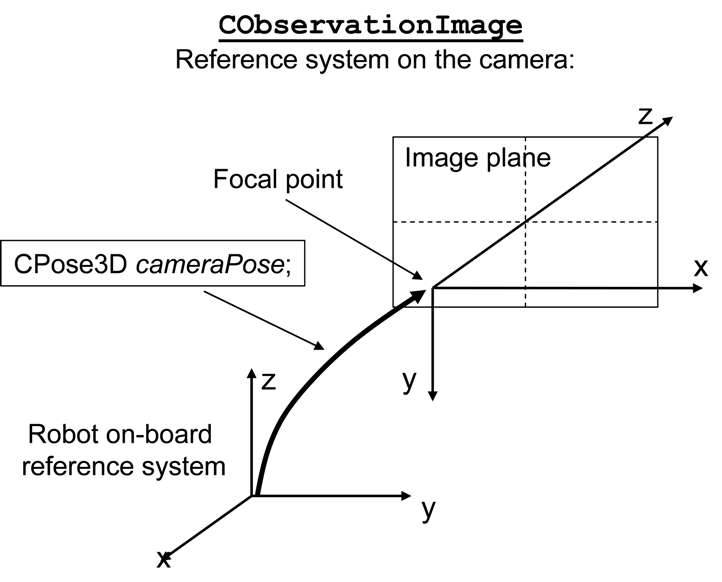
Declares a class derived from “CObservation” that encapsules an image from a camera, whose relative pose to robot is also stored.
The next figure illustrate the coordinates reference systems involved in this class:
See also:
CObservation, CObservationStereoImages
#include <mrpt/obs/CObservationImage.h> class CObservationImage: public mrpt::obs::CObservation { public: // fields mrpt::poses::CPose3D cameraPose; mrpt::img::TCamera cameraParams; mrpt::img::CImage image; // methods void getUndistortedImage(mrpt::img::CImage& out_img) const; virtual void getSensorPose(mrpt::poses::CPose3D& out_sensorPose) const; virtual void setSensorPose(const mrpt::poses::CPose3D& newSensorPose); virtual void getDescriptionAsText(std::ostream& o) const; virtual void load() const; };
Inherited Members¶
public: // fields mrpt::system::TTimeStamp timestamp {mrpt::system::now()}; std::string sensorLabel; // methods mrpt::system::TTimeStamp getTimeStamp() const; virtual mrpt::system::TTimeStamp getOriginalReceivedTimeStamp() const; virtual void load() const; virtual void unload(); template <class METRICMAP> bool insertObservationInto( METRICMAP* theMap, const mrpt::poses::CPose3D* robotPose = nullptr ) const; virtual void getSensorPose(mrpt::poses::CPose3D& out_sensorPose) const = 0; void getSensorPose(mrpt::math::TPose3D& out_sensorPose) const; virtual void setSensorPose(const mrpt::poses::CPose3D& newSensorPose) = 0; void setSensorPose(const mrpt::math::TPose3D& newSensorPose); virtual void getDescriptionAsText(std::ostream& o) const; std::string getDescriptionAsTextValue() const;
Fields¶
mrpt::poses::CPose3D cameraPose
The pose of the camera on the robot.
mrpt::img::TCamera cameraParams
Intrinsic and distortion parameters of the camera.
See the tutorial for a discussion of these parameters.
mrpt::img::CImage image
The image captured by the camera, that is, the main piece of information of this observation.
Methods¶
void getUndistortedImage(mrpt::img::CImage& out_img) const
Computes the un-distorted image, using the embeded camera intrinsic & distortion parameters.
virtual void getSensorPose(mrpt::poses::CPose3D& out_sensorPose) const
A general method to retrieve the sensor pose on the robot.
Note that most sensors will return a full (6D) CPose3D, but see the derived classes for more details or special cases.
See also:
virtual void setSensorPose(const mrpt::poses::CPose3D& newSensorPose)
A general method to change the sensor pose on the robot.
Note that most sensors will use the full (6D) CPose3D, but see the derived classes for more details or special cases.
See also:
virtual void getDescriptionAsText(std::ostream& o) const
Build a detailed, multi-line textual description of the observation contents and dump it to the output stream.
If overried by derived classes, call base CObservation::getDescriptionAsText() first to show common information.
This is the text that appears in RawLogViewer when selecting an object in the dataset
virtual void load() const
Makes sure all images and other fields which may be externally stored are loaded in memory.
Note that for all CImages, calling load() is not required since the images will be automatically loaded upon first access, so load() shouldn’t be needed to be called in normal cases by the user. If all the data were alredy loaded or this object has no externally stored data fields, calling this method has no effects.
See also: