Detailed Description
Finds partitions in metric maps based on N-cut graph partition theory.
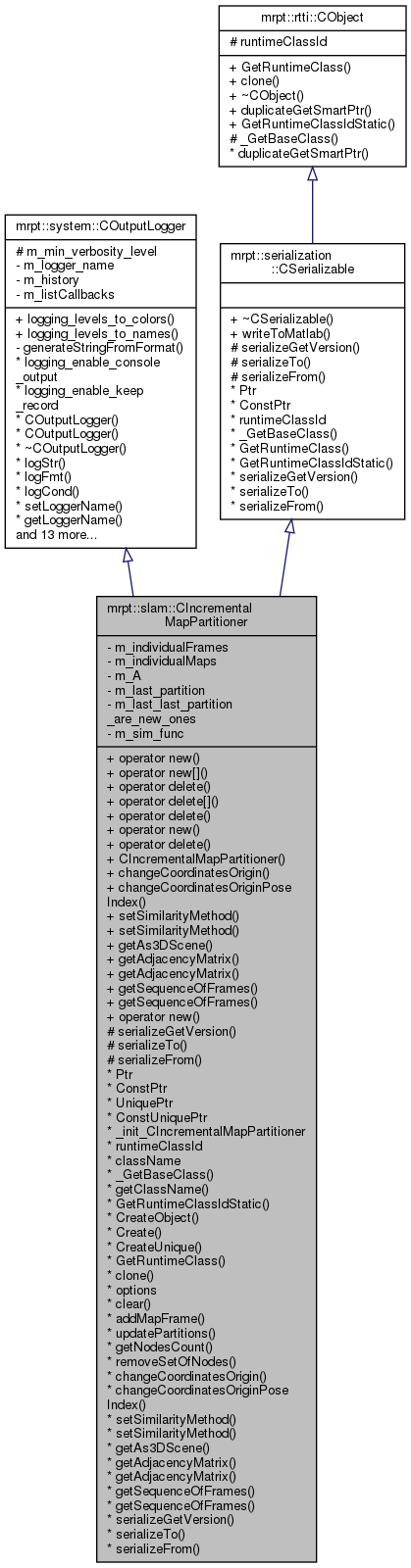
Definition at line 58 of file CIncrementalMapPartitioner.h.
#include <mrpt/slam/CIncrementalMapPartitioner.h>
Classes | |
| struct | TOptions |
| Configuration parameters. More... | |
Public Member Functions | |
| void * | operator new (size_t size) |
| void * | operator new[] (size_t size) |
| void | operator delete (void *ptr) noexcept |
| void | operator delete[] (void *ptr) noexcept |
| void | operator delete (void *memory, void *ptr) noexcept |
| void * | operator new (size_t size, const std::nothrow_t &) noexcept |
| void | operator delete (void *ptr, const std::nothrow_t &) noexcept |
| CIncrementalMapPartitioner () | |
| ctor More... | |
| virtual mxArray * | writeToMatlab () const |
Introduces a pure virtual method responsible for writing to a mxArray Matlab object, typically a MATLAB struct whose contents are documented in each derived class. More... | |
Change Coordinates System | |
Change the coordinate origin of all stored poses Used for consistency with future new poses to enter in the system. | |
| void | changeCoordinatesOrigin (const mrpt::poses::CPose3D &newOrigin) |
| void | changeCoordinatesOriginPoseIndex (unsigned int newOriginPose) |
| The new origin is given by the index of the pose that is to become the new origin. More... | |
| void | setSimilarityMethod (similarity_method_t method) |
| Select the similarity method to use for newly inserted keyframes. More... | |
| void | setSimilarityMethod (similarity_func_t func) |
| Sets a custom function for the similarity of new keyframes. More... | |
Access API to internal graph data | |
| void | getAs3DScene (mrpt::opengl::CSetOfObjects::Ptr &objs, const std::map< uint32_t, int64_t > *renameIndexes=NULL) const |
| Return a 3D representation of the graph: poses & links between them. More... | |
| template<class MATRIX > | |
| void | getAdjacencyMatrix (MATRIX &outMatrix) const |
| Return a copy of the adjacency matrix. More... | |
| const mrpt::math::CMatrixDouble & | getAdjacencyMatrix () const |
| Return a const ref to the internal adjacency matrix. More... | |
| const mrpt::maps::CSimpleMap * | getSequenceOfFrames () const |
| Read-only access to the sequence of Sensory Frames. More... | |
| mrpt::maps::CSimpleMap * | getSequenceOfFrames () |
| Access to the sequence of Sensory Frames. More... | |
RTTI classes and functions for polymorphic hierarchies | |
| mrpt::rtti::CObject::Ptr | duplicateGetSmartPtr () const |
| Returns a copy of the object, indepently of its class, as a smart pointer (the newly created object will exist as long as any copy of this smart pointer). More... | |
Static Public Member Functions | |
| static void * | operator new (size_t size, void *ptr) |
| static std::array< mrpt::system::TConsoleColor, NUMBER_OF_VERBOSITY_LEVELS > & | logging_levels_to_colors () |
| Map from VerbosityLevels to their corresponding mrpt::system::TConsoleColor. More... | |
| static std::array< std::string, NUMBER_OF_VERBOSITY_LEVELS > & | logging_levels_to_names () |
| Map from VerbosityLevels to their corresponding names. More... | |
Protected Member Functions | |
CSerializable virtual methods | |
| uint8_t | serializeGetVersion () const override |
| Must return the current versioning number of the object. More... | |
| void | serializeTo (mrpt::serialization::CArchive &out) const override |
| Pure virtual method for writing (serializing) to an abstract archive. More... | |
| void | serializeFrom (mrpt::serialization::CArchive &in, uint8_t serial_version) override |
| Pure virtual method for reading (deserializing) from an abstract archive. More... | |
Protected Attributes | |
| VerbosityLevel | m_min_verbosity_level |
| Provided messages with VerbosityLevel smaller than this value shall be ignored. More... | |
Private Attributes | |
| mrpt::maps::CSimpleMap | m_individualFrames |
| std::deque< mrpt::maps::CMultiMetricMap::Ptr > | m_individualMaps |
| mrpt::math::CMatrixD | m_A { 0,0 } |
| Adjacency matrix. More... | |
| std::vector< std::vector< uint32_t > > | m_last_partition |
| The last partition. More... | |
| bool | m_last_last_partition_are_new_ones { false } |
| This will be true after adding new observations, and before an "updatePartitions" is invoked. More... | |
| similarity_func_t | m_sim_func |
RTTI stuff | |
| using | Ptr = std::shared_ptr< CIncrementalMapPartitioner > |
| using | ConstPtr = std::shared_ptr< const CIncrementalMapPartitioner > |
| using | UniquePtr = std::unique_ptr< CIncrementalMapPartitioner > |
| using | ConstUniquePtr = std::unique_ptr< const CIncrementalMapPartitioner > |
| static mrpt::rtti::CLASSINIT | _init_CIncrementalMapPartitioner |
| static const mrpt::rtti::TRuntimeClassId | runtimeClassId |
| static constexpr const char * | className = "CIncrementalMapPartitioner" |
| static const mrpt::rtti::TRuntimeClassId * | _GetBaseClass () |
| static constexpr auto | getClassName () |
| static const mrpt::rtti::TRuntimeClassId & | GetRuntimeClassIdStatic () |
| static mrpt::rtti::CObject * | CreateObject () |
| template<typename... Args> | |
| static Ptr | Create (Args &&... args) |
| template<typename... Args> | |
| static UniquePtr | CreateUnique (Args &&... args) |
| virtual const mrpt::rtti::TRuntimeClassId * | GetRuntimeClass () const override |
| Returns information about the class of an object in runtime. More... | |
| virtual mrpt::rtti::CObject * | clone () const override |
| Returns a deep copy (clone) of the object, indepently of its class. More... | |
Main map partition API | |
| TOptions | options |
| Algorithm parameters. More... | |
| void | clear () |
| uint32_t | addMapFrame (const mrpt::obs::CSensoryFrame &frame, const mrpt::poses::CPose3DPDF &robotPose3D) |
| Insert a new keyframe to the graph. More... | |
| void | updatePartitions (std::vector< std::vector< uint32_t >> &partitions) |
| Recalculate the map/graph partitions. More... | |
| size_t | getNodesCount () |
| Get the total node count currently in the internal map/graph. More... | |
| void | removeSetOfNodes (std::vector< uint32_t > indexesToRemove, bool changeCoordsRef=true) |
| Remove a list of keyframes, with indices as returned by addMapFrame() More... | |
Logging methods | |
| bool | logging_enable_console_output |
| [Default=true] Set it to false in case you don't want the logged messages to be dumped to the output automatically. More... | |
| bool | logging_enable_keep_record |
| [Default=false] Enables storing all messages into an internal list. More... | |
| void | logStr (const VerbosityLevel level, const std::string &msg_str) const |
| Main method to add the specified message string to the logger. More... | |
| void | logFmt (const VerbosityLevel level, const char *fmt,...) const MRPT_printf_format_check(3 |
| Alternative logging method, which mimics the printf behavior. More... | |
| void void | logCond (const VerbosityLevel level, bool cond, const std::string &msg_str) const |
| Log the given message only if the condition is satisfied. More... | |
| void | setLoggerName (const std::string &name) |
| Set the name of the COutputLogger instance. More... | |
| std::string | getLoggerName () const |
| Return the name of the COutputLogger instance. More... | |
| void | setMinLoggingLevel (const VerbosityLevel level) |
| Set the minimum logging level for which the incoming logs are going to be taken into account. More... | |
| void | setVerbosityLevel (const VerbosityLevel level) |
| alias of setMinLoggingLevel() More... | |
| VerbosityLevel | getMinLoggingLevel () const |
| bool | isLoggingLevelVisible (VerbosityLevel level) const |
| void | getLogAsString (std::string &log_contents) const |
| Fill the provided string with the contents of the logger's history in std::string representation. More... | |
| std::string | getLogAsString () const |
| Get the history of COutputLogger instance in a string representation. More... | |
| void | writeLogToFile (const std::string *fname_in=NULL) const |
| Write the contents of the COutputLogger instance to an external file. More... | |
| void | dumpLogToConsole () const |
| Dump the current contents of the COutputLogger instance in the terminal window. More... | |
| std::string | getLoggerLastMsg () const |
| Return the last Tmsg instance registered in the logger history. More... | |
| void | getLoggerLastMsg (std::string &msg_str) const |
| Fill inputtted string with the contents of the last message in history. More... | |
| void | loggerReset () |
| Reset the contents of the logger instance. More... | |
| void | logRegisterCallback (output_logger_callback_t userFunc) |
| bool | logDeregisterCallback (output_logger_callback_t userFunc) |
Member Typedef Documentation
◆ ConstPtr
| using mrpt::slam::CIncrementalMapPartitioner::ConstPtr = std::shared_ptr<const CIncrementalMapPartitioner > |
Definition at line 62 of file CIncrementalMapPartitioner.h.
◆ ConstUniquePtr
| using mrpt::slam::CIncrementalMapPartitioner::ConstUniquePtr = std::unique_ptr<const CIncrementalMapPartitioner > |
Definition at line 62 of file CIncrementalMapPartitioner.h.
◆ Ptr
A type for the associated smart pointer
Definition at line 62 of file CIncrementalMapPartitioner.h.
◆ UniquePtr
| using mrpt::slam::CIncrementalMapPartitioner::UniquePtr = std::unique_ptr< CIncrementalMapPartitioner > |
Definition at line 62 of file CIncrementalMapPartitioner.h.
Constructor & Destructor Documentation
◆ CIncrementalMapPartitioner()
|
inline |
ctor
Definition at line 66 of file CIncrementalMapPartitioner.h.
Member Function Documentation
◆ _GetBaseClass()
|
staticprotected |
◆ addMapFrame()
| uint32_t CIncrementalMapPartitioner::addMapFrame | ( | const mrpt::obs::CSensoryFrame & | frame, |
| const mrpt::poses::CPose3DPDF & | robotPose3D | ||
| ) |
Insert a new keyframe to the graph.
Call this method each time a new observation is added to the map/graph. Afterwards, call updatePartitions() to get the updated partitions.
- Parameters
-
frame The sensed data robotPose An estimation of the robot global pose.
- Returns
- The index of the new pose in the graph, which can be used to refer to this pose in the future.
- See also
- updatePartitions
Definition at line 111 of file CIncrementalMapPartitioner.cpp.
References ASSERT_, eval_similarity_metric_map_matching(), eval_similarity_observation_overlap(), mrpt::obs::CSensoryFrame::insertObservationsInto(), mrpt::slam::map_keyframe_t::kf_id, mrpt::slam::map_keyframe_t::metric_map, MRPT_END, MRPT_START, mrpt::slam::map_keyframe_t::raw_observations, mrpt::slam::smCUSTOM_FUNCTION, mrpt::slam::smMETRIC_MAP_MATCHING, mrpt::slam::smOBSERVATION_OVERLAP, and THROW_EXCEPTION.
Referenced by mrpt::hmtslam::CHMTSLAM::areaAbstraction(), and mrpt::slam::CRangeBearingKFSLAM::processActionObservation().
◆ changeCoordinatesOrigin()
| void CIncrementalMapPartitioner::changeCoordinatesOrigin | ( | const mrpt::poses::CPose3D & | newOrigin | ) |
Definition at line 329 of file CIncrementalMapPartitioner.cpp.
◆ changeCoordinatesOriginPoseIndex()
| void CIncrementalMapPartitioner::changeCoordinatesOriginPoseIndex | ( | unsigned int | newOriginPose | ) |
The new origin is given by the index of the pose that is to become the new origin.
Definition at line 335 of file CIncrementalMapPartitioner.cpp.
References MRPT_END, and MRPT_START.
◆ clear()
| void CIncrementalMapPartitioner::clear | ( | ) |
Definition at line 102 of file CIncrementalMapPartitioner.cpp.
Referenced by mrpt::slam::CRangeBearingKFSLAM::reset().
◆ clone()
|
overridevirtual |
Returns a deep copy (clone) of the object, indepently of its class.
Implements mrpt::rtti::CObject.
◆ Create()
|
inlinestatic |
Definition at line 62 of file CIncrementalMapPartitioner.h.
◆ CreateObject()
|
static |
◆ CreateUnique()
|
inlinestatic |
Definition at line 62 of file CIncrementalMapPartitioner.h.
◆ dumpLogToConsole()
|
inherited |
Dump the current contents of the COutputLogger instance in the terminal window.
- See also
- writeToFile
Definition at line 190 of file COutputLogger.cpp.
◆ duplicateGetSmartPtr()
|
inlineinherited |
Returns a copy of the object, indepently of its class, as a smart pointer (the newly created object will exist as long as any copy of this smart pointer).
Definition at line 168 of file CObject.h.
References mrpt::rtti::CObject::clone().
Referenced by mrpt::obs::CRawlog::addActions(), and mrpt::obs::CRawlog::addObservations().
◆ getAdjacencyMatrix() [1/2]
|
inline |
Return a copy of the adjacency matrix.
Definition at line 186 of file CIncrementalMapPartitioner.h.
References m_A.
Referenced by mrpt::hmtslam::CHMTSLAM::generateLogFiles().
◆ getAdjacencyMatrix() [2/2]
|
inline |
Return a const ref to the internal adjacency matrix.
Definition at line 192 of file CIncrementalMapPartitioner.h.
References m_A.
◆ getAs3DScene()
| void CIncrementalMapPartitioner::getAs3DScene | ( | mrpt::opengl::CSetOfObjects::Ptr & | objs, |
| const std::map< uint32_t, int64_t > * | renameIndexes = NULL |
||
| ) | const |
Return a 3D representation of the graph: poses & links between them.
The previous contents of "objs" will be discarded
Definition at line 351 of file CIncrementalMapPartitioner.cpp.
References ASSERT_, mrpt::opengl::CGridPlaneXY::Create(), mrpt::format(), mrpt::keep_max(), mrpt::keep_min(), mrpt::poses::CPoseOrPoint< DERIVEDCLASS >::x(), and mrpt::poses::CPoseOrPoint< DERIVEDCLASS >::y().
Referenced by mrpt::hmtslam::CHMTSLAM::generateLogFiles().
◆ getClassName()
|
inlinestatic |
Definition at line 62 of file CIncrementalMapPartitioner.h.
◆ getLogAsString() [1/2]
|
inherited |
Fill the provided string with the contents of the logger's history in std::string representation.
Definition at line 154 of file COutputLogger.cpp.
◆ getLogAsString() [2/2]
|
inherited |
Get the history of COutputLogger instance in a string representation.
Definition at line 159 of file COutputLogger.cpp.
Referenced by mrpt::graphslam::deciders::CICPCriteriaNRD< GRAPH_T >::getDescriptiveReport().
◆ getLoggerLastMsg() [1/2]
|
inherited |
Return the last Tmsg instance registered in the logger history.
Definition at line 195 of file COutputLogger.cpp.
References mrpt::system::COutputLogger::TMsg::getAsString().
◆ getLoggerLastMsg() [2/2]
|
inherited |
Fill inputtted string with the contents of the last message in history.
Definition at line 201 of file COutputLogger.cpp.
◆ getLoggerName()
|
inherited |
Return the name of the COutputLogger instance.
- See also
- setLoggerName
Definition at line 143 of file COutputLogger.cpp.
◆ getMinLoggingLevel()
|
inlineinherited |
- See also
- setMinLoggingLevel
Definition at line 200 of file system/COutputLogger.h.
References mrpt::system::COutputLogger::m_min_verbosity_level.
Referenced by mrpt::maps::CRandomFieldGridMap2D::isEnabledVerbose(), and mrpt::slam::CMetricMapBuilderRBPF::processActionObservation().
◆ getNodesCount()
| size_t CIncrementalMapPartitioner::getNodesCount | ( | ) |
Get the total node count currently in the internal map/graph.
Definition at line 245 of file CIncrementalMapPartitioner.cpp.
◆ GetRuntimeClass()
|
overridevirtual |
Returns information about the class of an object in runtime.
Reimplemented from mrpt::serialization::CSerializable.
◆ GetRuntimeClassIdStatic()
|
static |
◆ getSequenceOfFrames() [1/2]
|
inline |
Read-only access to the sequence of Sensory Frames.
Definition at line 195 of file CIncrementalMapPartitioner.h.
References m_individualFrames.
◆ getSequenceOfFrames() [2/2]
|
inline |
Access to the sequence of Sensory Frames.
Definition at line 201 of file CIncrementalMapPartitioner.h.
References m_individualFrames.
◆ isLoggingLevelVisible()
|
inlineinherited |
Definition at line 201 of file system/COutputLogger.h.
References mrpt::system::COutputLogger::m_min_verbosity_level.
Referenced by mrpt::slam::CMetricMapBuilderRBPF::processActionObservation(), and mrpt::system::COutputLoggerStreamWrapper::~COutputLoggerStreamWrapper().
◆ logCond()
|
inherited |
Log the given message only if the condition is satisfied.
- See also
- log, logFmt
Definition at line 131 of file COutputLogger.cpp.
◆ logDeregisterCallback()
|
inherited |
- Returns
- true if an entry was found and deleted.
Definition at line 290 of file COutputLogger.cpp.
References getAddress(), and mrpt::system::COutputLogger::m_listCallbacks.
◆ logFmt()
|
inherited |
Alternative logging method, which mimics the printf behavior.
Handy for not having to first use mrpt::format to pass a std::string message to logStr
Definition at line 91 of file COutputLogger.cpp.
Referenced by mrpt::graphslam::deciders::CICPCriteriaNRD< GRAPH_T >::CICPCriteriaNRD(), mrpt::hmtslam::CTopLCDetector_GridMatching::computeTopologicalObservationModel(), CGraphSlamHandler< GRAPH_T >::execute(), mrpt::math::CLevenbergMarquardtTempl< VECTORTYPE, USERPARAM >::execute(), CGraphSlamHandler< GRAPH_T >::initOutputDir(), CGraphSlamHandler< GRAPH_T >::initVisualization(), mrpt::nav::CNavigatorManualSequence::navigationStep(), mrpt::nav::CAbstractNavigator::performNavigationStepNavigating(), CGraphSlamHandler< GRAPH_T >::readConfigFname(), CGraphSlamHandler< GRAPH_T >::saveResults(), CGraphSlamHandler< GRAPH_T >::setResultsDirName(), mrpt::nav::CReactiveNavigationSystem::STEP1_InitPTGs(), and CGraphSlamHandler< GRAPH_T >::~CGraphSlamHandler().
◆ loggerReset()
|
inherited |
Reset the contents of the logger instance.
Called upon construction.
Definition at line 206 of file COutputLogger.cpp.
References mrpt::system::LVL_INFO.
◆ logging_levels_to_colors()
|
staticinherited |
Map from VerbosityLevels to their corresponding mrpt::system::TConsoleColor.
Handy for coloring the input based on the verbosity of the message
Definition at line 47 of file COutputLogger.cpp.
References logging_levels_to_colors.
Referenced by mrpt::system::COutputLogger::TMsg::dumpToConsole().
◆ logging_levels_to_names()
|
staticinherited |
Map from VerbosityLevels to their corresponding names.
Handy for printing the current message VerbosityLevel along with the actual content
Definition at line 60 of file COutputLogger.cpp.
References logging_levels_to_names.
Referenced by mrpt::system::COutputLogger::TMsg::getAsString().
◆ logRegisterCallback()
|
inherited |
Definition at line 277 of file COutputLogger.cpp.
References mrpt::system::COutputLogger::m_listCallbacks.
◆ logStr()
|
inherited |
Main method to add the specified message string to the logger.
Definition at line 72 of file COutputLogger.cpp.
References mrpt::system::COutputLogger::TMsg::body, mrpt::system::COutputLogger::TMsg::dumpToConsole(), mrpt::system::COutputLogger::TMsg::level, mrpt::system::COutputLogger::TMsg::name, and mrpt::system::COutputLogger::TMsg::timestamp.
Referenced by mrpt::slam::PF_implementation< mrpt::math::TPose3D, CMonteCarloLocalization3D, mrpt::bayes::particle_storage_mode::VALUE >::PF_SLAM_implementation_pfAuxiliaryPFStandardAndOptimal(), mrpt::nav::CReactiveNavigationSystem::STEP1_InitPTGs(), and mrpt::system::COutputLoggerStreamWrapper::~COutputLoggerStreamWrapper().
◆ operator delete() [1/3]
|
inlinenoexcept |
Definition at line 62 of file CIncrementalMapPartitioner.h.
◆ operator delete() [2/3]
Definition at line 62 of file CIncrementalMapPartitioner.h.
◆ operator delete() [3/3]
|
inlinenoexcept |
Definition at line 62 of file CIncrementalMapPartitioner.h.
◆ operator delete[]()
Definition at line 62 of file CIncrementalMapPartitioner.h.
◆ operator new() [1/3]
|
inlinestatic |
Definition at line 62 of file CIncrementalMapPartitioner.h.
◆ operator new() [2/3]
|
inline |
Definition at line 62 of file CIncrementalMapPartitioner.h.
◆ operator new() [3/3]
|
inlinenoexcept |
Definition at line 62 of file CIncrementalMapPartitioner.h.
◆ operator new[]()
|
inline |
Definition at line 62 of file CIncrementalMapPartitioner.h.
◆ removeSetOfNodes()
| void CIncrementalMapPartitioner::removeSetOfNodes | ( | std::vector< uint32_t > | indexesToRemove, |
| bool | changeCoordsRef = true |
||
| ) |
Remove a list of keyframes, with indices as returned by addMapFrame()
- Parameters
-
changeCoordsRef If true, coordinates are changed to leave the first node at (0,0,0).
Definition at line 250 of file CIncrementalMapPartitioner.cpp.
References ASSERT_, MRPT_END, and MRPT_START.
◆ serializeFrom()
|
overrideprotectedvirtual |
Pure virtual method for reading (deserializing) from an abstract archive.
Users don't call this method directly. Instead, use stream >> object;.
- Parameters
-
in The input binary stream where the object data must read from. version The version of the object stored in the stream: use this version number in your code to know how to read the incoming data.
- Exceptions
-
std::exception On any I/O error
Implements mrpt::serialization::CSerializable.
Definition at line 429 of file CIncrementalMapPartitioner.cpp.
References MRPT_THROW_UNKNOWN_SERIALIZATION_VERSION.
◆ serializeGetVersion()
|
overrideprotectedvirtual |
Must return the current versioning number of the object.
Start in zero for new classes, and increments each time there is a change in the stored format.
Implements mrpt::serialization::CSerializable.
Definition at line 452 of file CIncrementalMapPartitioner.cpp.
◆ serializeTo()
|
overrideprotectedvirtual |
Pure virtual method for writing (serializing) to an abstract archive.
Users don't call this method directly. Instead, use stream << object;.
- Exceptions
-
std::exception On any I/O error
Implements mrpt::serialization::CSerializable.
Definition at line 453 of file CIncrementalMapPartitioner.cpp.
◆ setLoggerName()
|
inherited |
Set the name of the COutputLogger instance.
- See also
- getLoggerName
Definition at line 138 of file COutputLogger.cpp.
Referenced by mrpt::slam::CMetricMapBuilderICP::CMetricMapBuilderICP(), mrpt::slam::CMetricMapBuilderRBPF::CMetricMapBuilderRBPF(), mrpt::slam::CMonteCarloLocalization2D::CMonteCarloLocalization2D(), mrpt::slam::CMonteCarloLocalization3D::CMonteCarloLocalization3D(), and mrpt::graphslam::CWindowManager::initCWindowManager().
◆ setMinLoggingLevel()
|
inherited |
Set the minimum logging level for which the incoming logs are going to be taken into account.
String messages with specified VerbosityLevel smaller than the min, will not be outputted to the screen and neither will a record of them be stored in by the COutputLogger instance
Definition at line 144 of file COutputLogger.cpp.
Referenced by mrpt::maps::CRandomFieldGridMap2D::enableVerbose(), mrpt::math::CLevenbergMarquardtTempl< VECTORTYPE, USERPARAM >::execute(), mrpt::hwdrivers::CHokuyoURG::initialize(), and mrpt::graphslam::deciders::CICPCriteriaNRD< GRAPH_T >::loadParams().
◆ setSimilarityMethod() [1/2]
|
inline |
Select the similarity method to use for newly inserted keyframes.
Definition at line 164 of file CIncrementalMapPartitioner.h.
References options, and mrpt::slam::CIncrementalMapPartitioner::TOptions::simil_method.
◆ setSimilarityMethod() [2/2]
|
inline |
Sets a custom function for the similarity of new keyframes.
Definition at line 169 of file CIncrementalMapPartitioner.h.
References m_sim_func, options, mrpt::slam::CIncrementalMapPartitioner::TOptions::simil_method, and mrpt::slam::smCUSTOM_FUNCTION.
◆ setVerbosityLevel()
|
inherited |
alias of setMinLoggingLevel()
Definition at line 149 of file COutputLogger.cpp.
Referenced by mrpt::nav::CAbstractNavigator::CAbstractNavigator(), mrpt::slam::CMetricMapBuilderRBPF::CMetricMapBuilderRBPF(), mrpt::comms::CServerTCPSocket::CServerTCPSocket(), mrpt::slam::CMetricMapBuilderRBPF::processActionObservation(), and mrpt::math::ransac_detect_2D_lines().
◆ updatePartitions()
| void CIncrementalMapPartitioner::updatePartitions | ( | std::vector< std::vector< uint32_t >> & | partitions | ) |
Recalculate the map/graph partitions.
- See also
- addMapFrame()
Definition at line 227 of file CIncrementalMapPartitioner.cpp.
References MRPT_END, and MRPT_START.
Referenced by mrpt::hmtslam::CHMTSLAM::areaAbstraction(), mrpt::slam::CRangeBearingKFSLAM::processActionObservation(), and mrpt::slam::CRangeBearingKFSLAM::reconsiderPartitionsNow().
◆ writeLogToFile()
|
inherited |
Write the contents of the COutputLogger instance to an external file.
Upon call to this method, COutputLogger dumps the contents of all the logged commands so far to the specified external file. By default the filename is set to ${LOGGERNAME}.log except if the fname parameter is provided
- See also
- dumpToConsole, getAsString
Definition at line 165 of file COutputLogger.cpp.
References ASSERTMSG_, and mrpt::format().
◆ writeToMatlab()
|
inlinevirtualinherited |
Introduces a pure virtual method responsible for writing to a mxArray Matlab object, typically a MATLAB struct whose contents are documented in each derived class.
- Returns
- A new
mxArray(caller is responsible of memory freeing) or nullptr is class does not support conversion to MATLAB.
Definition at line 68 of file CSerializable.h.
Member Data Documentation
◆ _init_CIncrementalMapPartitioner
|
staticprotected |
Definition at line 62 of file CIncrementalMapPartitioner.h.
◆ className
|
static |
Definition at line 62 of file CIncrementalMapPartitioner.h.
◆ logging_enable_console_output
|
inherited |
[Default=true] Set it to false in case you don't want the logged messages to be dumped to the output automatically.
Definition at line 239 of file system/COutputLogger.h.
◆ logging_enable_keep_record
|
inherited |
[Default=false] Enables storing all messages into an internal list.
- See also
- writeLogToFile, getLogAsString
Definition at line 242 of file system/COutputLogger.h.
◆ m_A
|
private |
Adjacency matrix.
Definition at line 212 of file CIncrementalMapPartitioner.h.
Referenced by getAdjacencyMatrix().
◆ m_individualFrames
|
private |
Definition at line 208 of file CIncrementalMapPartitioner.h.
Referenced by getSequenceOfFrames().
◆ m_individualMaps
|
private |
Definition at line 209 of file CIncrementalMapPartitioner.h.
◆ m_last_last_partition_are_new_ones
|
private |
This will be true after adding new observations, and before an "updatePartitions" is invoked.
Definition at line 219 of file CIncrementalMapPartitioner.h.
◆ m_last_partition
|
private |
The last partition.
Definition at line 215 of file CIncrementalMapPartitioner.h.
◆ m_min_verbosity_level
|
protectedinherited |
Provided messages with VerbosityLevel smaller than this value shall be ignored.
Definition at line 252 of file system/COutputLogger.h.
Referenced by mrpt::system::COutputLogger::getMinLoggingLevel(), and mrpt::system::COutputLogger::isLoggingLevelVisible().
◆ m_sim_func
|
private |
Definition at line 221 of file CIncrementalMapPartitioner.h.
Referenced by setSimilarityMethod().
◆ options
| TOptions mrpt::slam::CIncrementalMapPartitioner::options |
Algorithm parameters.
Definition at line 117 of file CIncrementalMapPartitioner.h.
Referenced by mrpt::hmtslam::CHMTSLAM::areaAbstraction(), mrpt::slam::CRangeBearingKFSLAM::loadOptions(), mrpt::slam::CRangeBearingKFSLAM::mapPartitionOptions(), mrpt::slam::CRangeBearingKFSLAM::reset(), and setSimilarityMethod().
◆ runtimeClassId
|
staticprotected |
Definition at line 62 of file CIncrementalMapPartitioner.h.