Detailed Description
Searches for collision-free path in 2D occupancy grids for holonomic circular robots.
The implementation first enlargest obstacles with robot radius, then applies a wavefront algorithm to find the shortest free path between origin and target 2D points.
Notice that this simple planner does not take into account robot kinematic constraints.
Definition at line 33 of file PlannerSimple2D.h.
#include <mrpt/nav/planners/PlannerSimple2D.h>
Public Member Functions | |
| PlannerSimple2D () | |
| Default constructor. More... | |
| virtual | ~PlannerSimple2D () |
| Destructor. More... | |
| void | computePath (const mrpt::maps::COccupancyGridMap2D &theMap, const mrpt::poses::CPose2D &origin, const mrpt::poses::CPose2D &target, std::deque< mrpt::math::TPoint2D > &path, bool ¬Found, float maxSearchPathLength=-1) const |
| This method compute the optimal path for a circular robot, in the given occupancy grid map, from the origin location to a target point. More... | |
Public Attributes | |
| float | occupancyThreshold |
| The maximum occupancy probability to consider a cell as an obstacle, default=0.5 More... | |
| float | minStepInReturnedPath |
| The minimum distance between points in the returned found path (default=0.4); Notice that full grid resolution is used in path finding, this is only a way to reduce the amount of redundant information to be returned. More... | |
| float | robotRadius |
| The aproximate robot radius used in the planification. More... | |
Constructor & Destructor Documentation
◆ PlannerSimple2D()
| PlannerSimple2D::PlannerSimple2D | ( | ) |
Default constructor.
Definition at line 25 of file PlannerSimple2D.cpp.
◆ ~PlannerSimple2D()
|
inlinevirtual |
Destructor.
Definition at line 39 of file PlannerSimple2D.h.
Member Function Documentation
◆ computePath()
| void PlannerSimple2D::computePath | ( | const mrpt::maps::COccupancyGridMap2D & | theMap, |
| const mrpt::poses::CPose2D & | origin, | ||
| const mrpt::poses::CPose2D & | target, | ||
| std::deque< mrpt::math::TPoint2D > & | path, | ||
| bool & | notFound, | ||
| float | maxSearchPathLength = -1 |
||
| ) | const |
This method compute the optimal path for a circular robot, in the given occupancy grid map, from the origin location to a target point.
The options and additional parameters to this method can be set with member configuration variables.
- Parameters
-
theMap [IN] The occupancy gridmap used to the planning. origin [IN] The starting pose of the robot, in coordinates of "map". target [IN] The desired target pose for the robot, in coordinates of "map". path [OUT] The found path, in global coordinates relative to "map". notFount [OUT] Will be true if no path has been found. maxSearchPathLength [IN] The maximum path length to search for, in meters (-1 = no limit)
- See also
- robotRadius
- Exceptions
-
std::exception On any error
Definition at line 33 of file PlannerSimple2D.cpp.
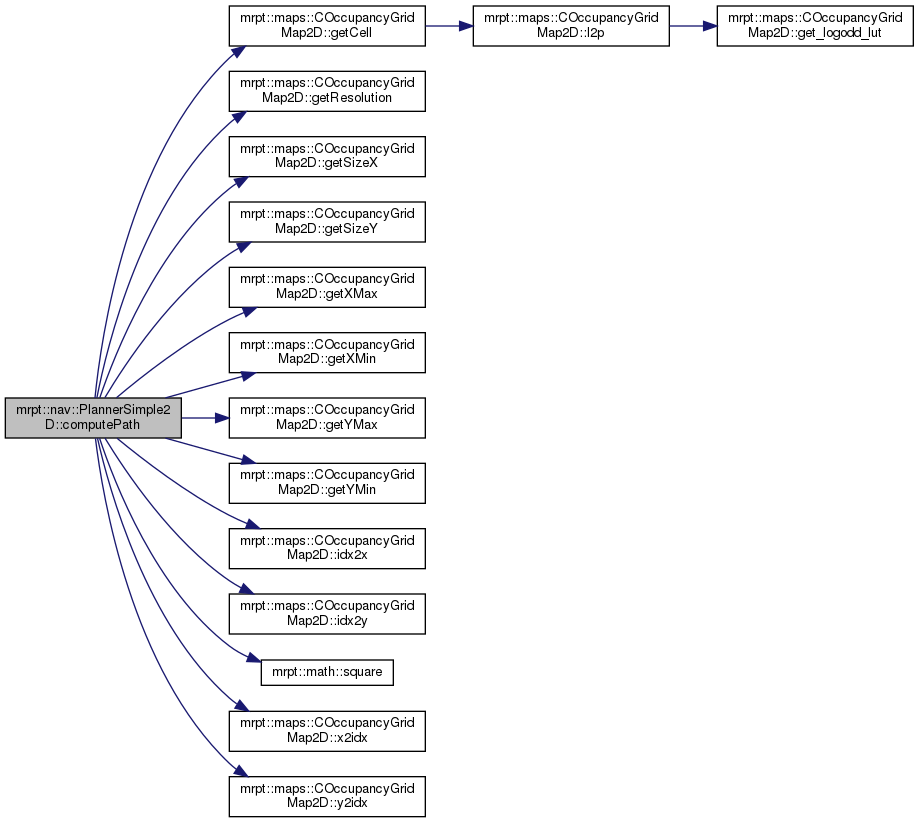
References ASSERT_, CELL_EMPTY, CELL_OBSTACLE, CELL_ORIGIN, CELL_TARGET, mrpt::maps::COccupancyGridMap2D::getCell(), mrpt::maps::COccupancyGridMap2D::getResolution(), mrpt::maps::COccupancyGridMap2D::getSizeX(), mrpt::maps::COccupancyGridMap2D::getSizeY(), mrpt::maps::COccupancyGridMap2D::getXMax(), mrpt::maps::COccupancyGridMap2D::getXMin(), mrpt::maps::COccupancyGridMap2D::getYMax(), mrpt::maps::COccupancyGridMap2D::getYMin(), mrpt::maps::COccupancyGridMap2D::idx2x(), mrpt::maps::COccupancyGridMap2D::idx2y(), min, minStepInReturnedPath, occupancyThreshold, robotRadius, mrpt::math::square(), val, mrpt::math::TPoint2D::x, mrpt::maps::COccupancyGridMap2D::x2idx(), mrpt::math::TPoint2D::y, and mrpt::maps::COccupancyGridMap2D::y2idx().
Member Data Documentation
◆ minStepInReturnedPath
| float mrpt::nav::PlannerSimple2D::minStepInReturnedPath |
The minimum distance between points in the returned found path (default=0.4); Notice that full grid resolution is used in path finding, this is only a way to reduce the amount of redundant information to be returned.
Definition at line 50 of file PlannerSimple2D.h.
Referenced by computePath().
◆ occupancyThreshold
| float mrpt::nav::PlannerSimple2D::occupancyThreshold |
The maximum occupancy probability to consider a cell as an obstacle, default=0.5
Definition at line 42 of file PlannerSimple2D.h.
Referenced by computePath().
◆ robotRadius
| float mrpt::nav::PlannerSimple2D::robotRadius |
The aproximate robot radius used in the planification.
Default is 0.35m
Definition at line 54 of file PlannerSimple2D.h.
Referenced by computePath().