Detailed Description
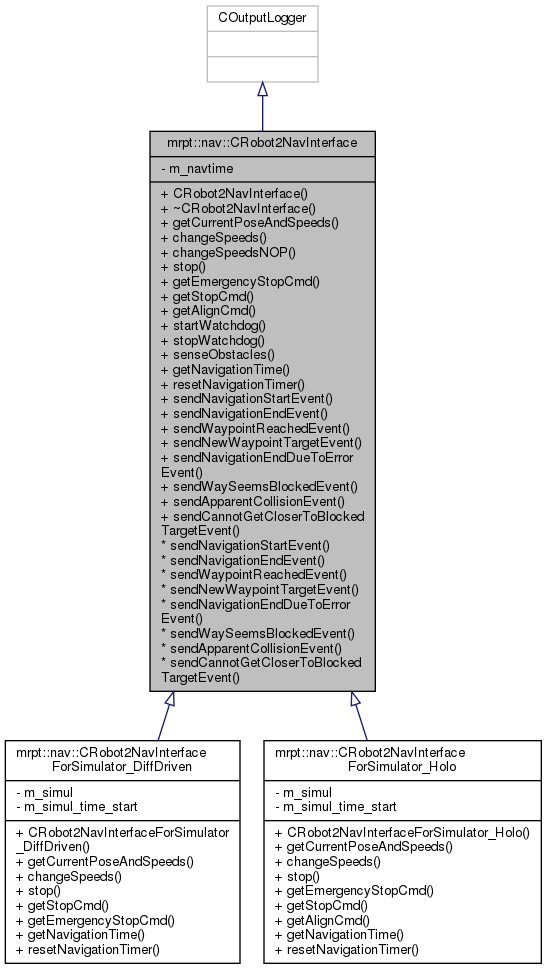
The pure virtual interface between a real or simulated robot and any CAbstractNavigator-derived class.
The user must define a new class derived from CRobot2NavInterface and reimplement all pure virtual and the desired virtual methods according to the documentation in this class.
[New in MRPT 1.5.0] This class does not make assumptions about the kinematic model of the robot, so it can work with either Ackermann, differential-driven or holonomic robots. It will depend on the used PTGs, so checkout each PTG documentation for the lenght and meaning of velocity commands.
If used for a simulator, users may prefer to inherit from one of these classes, which already provide partial implementations:
- mrpt::nav::CRobot2NavInterfaceForSimulator_DiffDriven
- mrpt::nav::CRobot2NavInterfaceForSimulator_Holo
Definition at line 44 of file CRobot2NavInterface.h.
#include <mrpt/nav/reactive/CRobot2NavInterface.h>
Public Member Functions | |
| CRobot2NavInterface () | |
| virtual | ~CRobot2NavInterface () |
| virtual bool | getCurrentPoseAndSpeeds (mrpt::math::TPose2D &curPose, mrpt::math::TTwist2D &curVelGlobal, mrpt::system::TTimeStamp ×tamp, mrpt::math::TPose2D &curOdometry, std::string &frame_id)=0 |
| Get the current pose and velocity of the robot. More... | |
| virtual bool | changeSpeeds (const mrpt::kinematics::CVehicleVelCmd &vel_cmd)=0 |
| Sends a velocity command to the robot. More... | |
| virtual bool | changeSpeedsNOP () |
| Just like changeSpeeds(), but will be called when the last velocity command is still the preferred solution, so there is no need to change that past command. More... | |
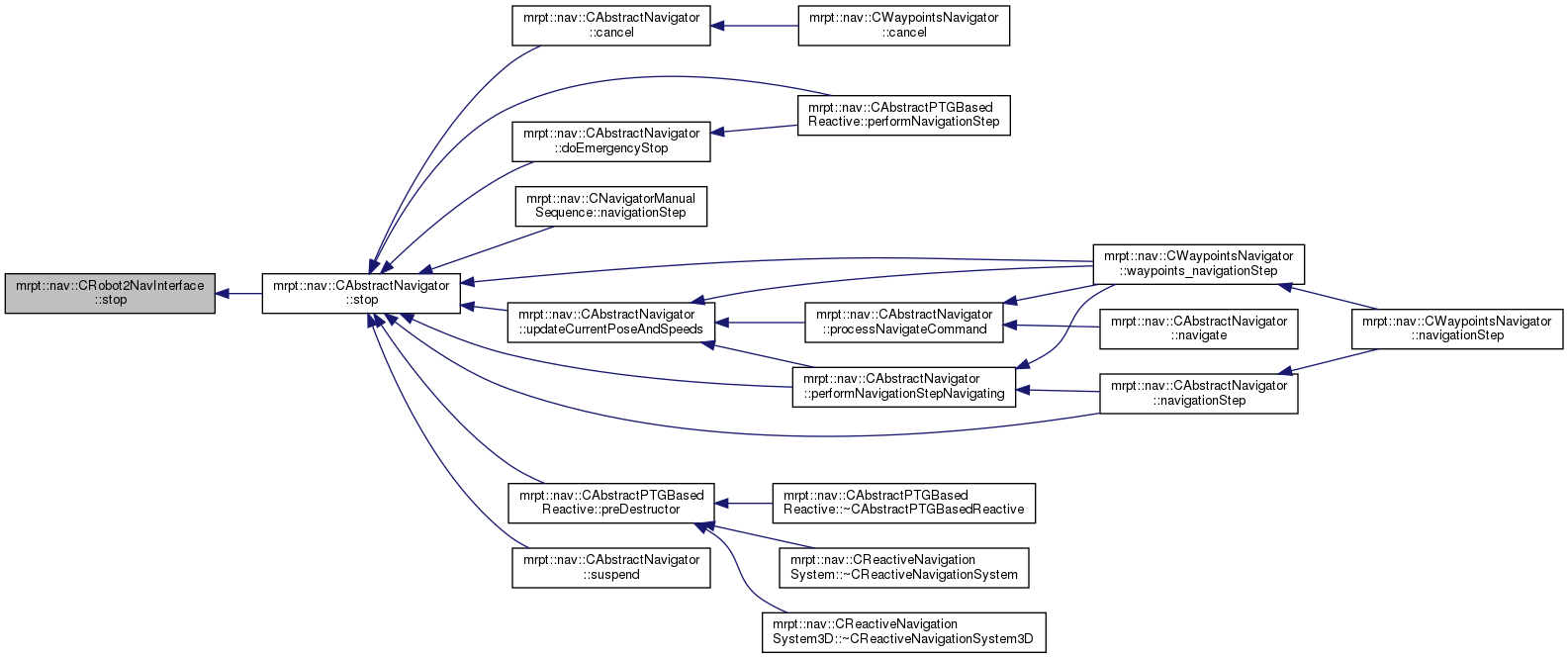
| virtual bool | stop (bool isEmergencyStop=true)=0 |
| Stop the robot right now. More... | |
| virtual mrpt::kinematics::CVehicleVelCmd::Ptr | getEmergencyStopCmd ()=0 |
| Gets the emergency stop command for the current robot. More... | |
| virtual mrpt::kinematics::CVehicleVelCmd::Ptr | getStopCmd ()=0 |
| Gets the emergency stop command for the current robot. More... | |
| virtual mrpt::kinematics::CVehicleVelCmd::Ptr | getAlignCmd (const double relative_heading_radians) |
| Gets a motion command to make the robot to align with a given relative heading, without translating. More... | |
| virtual bool | startWatchdog (float T_ms) |
| Start the watchdog timer of the robot platform, if any, for maximum expected delay between consecutive calls to changeSpeeds(). More... | |
| virtual bool | stopWatchdog () |
| Stop the watchdog timer. More... | |
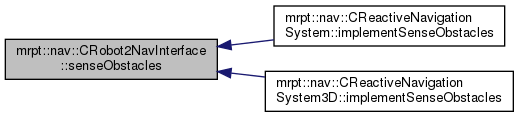
| virtual bool | senseObstacles (mrpt::maps::CSimplePointsMap &obstacles, mrpt::system::TTimeStamp ×tamp)=0 |
| Return the current set of obstacle points, as seen from the local coordinate frame of the robot. More... | |
| virtual double | getNavigationTime () |
| Returns the number of seconds ellapsed since the constructor of this class was invoked, or since the last call of resetNavigationTimer(). More... | |
| virtual void | resetNavigationTimer () |
| see getNavigationTime() More... | |
Navigation event callbacks | |
| virtual void | sendNavigationStartEvent () |
| Callback: Start of navigation command. More... | |
| virtual void | sendNavigationEndEvent () |
| Callback: End of navigation command (reach of single goal, or final waypoint of waypoint list) More... | |
| virtual void | sendWaypointReachedEvent (int waypoint_index, bool reached_nSkipped) |
| Callback: Reached an intermediary waypoint in waypoint list navigation. More... | |
| virtual void | sendNewWaypointTargetEvent (int waypoint_index) |
| Callback: Heading towards a new intermediary/final waypoint in waypoint list navigation. More... | |
| virtual void | sendNavigationEndDueToErrorEvent () |
| Callback: Error asking sensory data from robot or sending motor commands. More... | |
| virtual void | sendWaySeemsBlockedEvent () |
| Callback: No progression made towards target for a predefined period of time. More... | |
| virtual void | sendApparentCollisionEvent () |
| Callback: Apparent collision event (i.e. More... | |
| virtual void | sendCannotGetCloserToBlockedTargetEvent () |
| Callback: Target seems to be blocked by an obstacle. More... | |
Private Attributes | |
| mrpt::utils::CTicTac | m_navtime |
| For getNavigationTime. More... | |
Constructor & Destructor Documentation
◆ CRobot2NavInterface()
| CRobot2NavInterface::CRobot2NavInterface | ( | ) |
Definition at line 16 of file CRobot2NavInterface.cpp.
◆ ~CRobot2NavInterface()
|
virtual |
Definition at line 20 of file CRobot2NavInterface.cpp.
Member Function Documentation
◆ changeSpeeds()
|
pure virtual |
Sends a velocity command to the robot.
The number components in each command depends on children classes of mrpt::kinematics::CVehicleVelCmd. One robot may accept one or more different CVehicleVelCmd classes. This method resets the watchdog timer (that may be or may be not implemented in a particular robotic platform) started with startWatchdog()
- Returns
- false on any error.
- See also
- startWatchdog
Implemented in mrpt::nav::CRobot2NavInterfaceForSimulator_DiffDriven, and mrpt::nav::CRobot2NavInterfaceForSimulator_Holo.
Referenced by mrpt::nav::CAbstractNavigator::changeSpeeds().

◆ changeSpeedsNOP()
|
virtual |
Just like changeSpeeds(), but will be called when the last velocity command is still the preferred solution, so there is no need to change that past command.
The unique effect of this callback would be resetting the watchdog timer.
- Returns
- false on any error.
- See also
- changeSpeeds(), startWatchdog()
Definition at line 21 of file CRobot2NavInterface.cpp.
References MRPT_LOG_THROTTLE_INFO.
Referenced by mrpt::nav::CAbstractNavigator::changeSpeedsNOP().

◆ getAlignCmd()
|
virtual |
Gets a motion command to make the robot to align with a given relative heading, without translating.
Only for circular robots that can rotate in place; otherwise, return an empty smart pointer to indicate that the operation is not possible (this is what the default implementation does).
Reimplemented in mrpt::nav::CRobot2NavInterfaceForSimulator_Holo.
Definition at line 30 of file CRobot2NavInterface.cpp.
Referenced by mrpt::nav::CWaypointsNavigator::waypoints_navigationStep().

◆ getCurrentPoseAndSpeeds()
|
pure virtual |
Get the current pose and velocity of the robot.
The implementation should not take too much time to return, so if it might take more than ~10ms to ask the robot for the instantaneous data, it may be good enough to return the latest values from a cache which is updated in a parallel thread.
- Returns
- false on any error retrieving these values from the robot.
- Parameters
-
curPose (output) The latest robot pose (typically from a mapping/localization module), in world coordinates. (x,y: meters, phi: radians) curVelGlobal (output) The latest robot velocity vector, in world coordinates. (vx,vy: m/s, omega: rad/s) timestamp (output) The timestamp for the read pose and velocity values. Use mrpt::system::now() unless you have something more accurate. curOdometry (output) The latest robot raw odometry pose; may have long-time drift should be more locally consistent than curPose (x,y: meters, phi: radians) frame_id (output) ID of the coordinate frame for curPose. Default is not modified is "map". [Only for future support to submapping,etc.]
Implemented in mrpt::nav::CRobot2NavInterfaceForSimulator_DiffDriven, and mrpt::nav::CRobot2NavInterfaceForSimulator_Holo.
Referenced by mrpt::nav::CAbstractNavigator::updateCurrentPoseAndSpeeds().

◆ getEmergencyStopCmd()
|
pure virtual |
Gets the emergency stop command for the current robot.
- Returns
- the emergency stop command
Implemented in mrpt::nav::CRobot2NavInterfaceForSimulator_DiffDriven, and mrpt::nav::CRobot2NavInterfaceForSimulator_Holo.
Referenced by mrpt::nav::CAbstractPTGBasedReactive::performNavigationStep().

◆ getNavigationTime()
|
virtual |
Returns the number of seconds ellapsed since the constructor of this class was invoked, or since the last call of resetNavigationTimer().
This will be normally wall-clock time, except in simulators where this method will return simulation time.
Reimplemented in mrpt::nav::CRobot2NavInterfaceForSimulator_DiffDriven, and mrpt::nav::CRobot2NavInterfaceForSimulator_Holo.
Definition at line 119 of file CRobot2NavInterface.cpp.
References m_navtime, and mrpt::utils::CTicTac::Tac().
Referenced by mrpt::nav::CNavigatorManualSequence::navigationStep(), and mrpt::nav::CAbstractNavigator::updateCurrentPoseAndSpeeds().


◆ getStopCmd()
|
pure virtual |
Gets the emergency stop command for the current robot.
- Returns
- the emergency stop command
Implemented in mrpt::nav::CRobot2NavInterfaceForSimulator_DiffDriven, and mrpt::nav::CRobot2NavInterfaceForSimulator_Holo.
◆ resetNavigationTimer()
|
virtual |
Reimplemented in mrpt::nav::CRobot2NavInterfaceForSimulator_DiffDriven, and mrpt::nav::CRobot2NavInterfaceForSimulator_Holo.
Definition at line 121 of file CRobot2NavInterface.cpp.
References m_navtime, and mrpt::utils::CTicTac::Tic().
Referenced by mrpt::nav::CNavigatorManualSequence::initialize().


◆ sendApparentCollisionEvent()
|
virtual |
Callback: Apparent collision event (i.e.
there is at least one obstacle point inside the robot shape)
Definition at line 102 of file CRobot2NavInterface.cpp.
References MRPT_LOG_THROTTLE_INFO.
Referenced by mrpt::nav::CAbstractPTGBasedReactive::performNavigationStep().

◆ sendCannotGetCloserToBlockedTargetEvent()
|
virtual |
Callback: Target seems to be blocked by an obstacle.
Definition at line 110 of file CRobot2NavInterface.cpp.
References MRPT_LOG_THROTTLE_INFO.
◆ sendNavigationEndDueToErrorEvent()
|
virtual |
Callback: Error asking sensory data from robot or sending motor commands.
Definition at line 86 of file CRobot2NavInterface.cpp.
References MRPT_LOG_THROTTLE_INFO.
◆ sendNavigationEndEvent()
|
virtual |
Callback: End of navigation command (reach of single goal, or final waypoint of waypoint list)
Definition at line 63 of file CRobot2NavInterface.cpp.
References MRPT_LOG_INFO.
Referenced by mrpt::nav::CAbstractNavigator::performNavigationStepNavigating().

◆ sendNavigationStartEvent()
|
virtual |
Callback: Start of navigation command.
Definition at line 56 of file CRobot2NavInterface.cpp.
References MRPT_LOG_INFO.
Referenced by mrpt::nav::CAbstractNavigator::performNavigationStepNavigating().

◆ sendNewWaypointTargetEvent()
|
virtual |
Callback: Heading towards a new intermediary/final waypoint in waypoint list navigation.
Definition at line 79 of file CRobot2NavInterface.cpp.
References MRPT_LOG_INFO_STREAM.
Referenced by mrpt::nav::CWaypointsNavigator::waypoints_navigationStep().

◆ sendWaypointReachedEvent()
|
virtual |
Callback: Reached an intermediary waypoint in waypoint list navigation.
reached_nSkipped will be true if the waypoint was physically reached; false if it was actually "skipped".
Definition at line 70 of file CRobot2NavInterface.cpp.
References MRPT_LOG_INFO_STREAM.
Referenced by mrpt::nav::CWaypointsNavigator::waypoints_navigationStep().

◆ sendWaySeemsBlockedEvent()
|
virtual |
Callback: No progression made towards target for a predefined period of time.
Definition at line 94 of file CRobot2NavInterface.cpp.
References MRPT_LOG_THROTTLE_INFO.
Referenced by mrpt::nav::CAbstractNavigator::performNavigationStepNavigating().

◆ senseObstacles()
|
pure virtual |
Return the current set of obstacle points, as seen from the local coordinate frame of the robot.
- Returns
- false on any error.
- Parameters
-
[out] obstacles A representation of obstacles in robot-centric coordinates. [out] timestamp The timestamp for the read obstacles. Use mrpt::system::now() unless you have something more accurate.
Referenced by mrpt::nav::CReactiveNavigationSystem::implementSenseObstacles(), and mrpt::nav::CReactiveNavigationSystem3D::implementSenseObstacles().
◆ startWatchdog()
|
virtual |
Start the watchdog timer of the robot platform, if any, for maximum expected delay between consecutive calls to changeSpeeds().
- Parameters
-
T_ms Period, in ms.
- Returns
- false on any error.
Definition at line 37 of file CRobot2NavInterface.cpp.
References MRPT_LOG_INFO_FMT.
Referenced by mrpt::nav::CAbstractNavigator::internal_onStartNewNavigation().

◆ stop()
|
pure virtual |
Stop the robot right now.
- Parameters
-
[in] isEmergencyStop true if stop is due to some unexpected error. false if "stop" happens as part of a normal operation (e.g. target reached).
- Returns
- false on any error.
Implemented in mrpt::nav::CRobot2NavInterfaceForSimulator_DiffDriven, and mrpt::nav::CRobot2NavInterfaceForSimulator_Holo.
Referenced by mrpt::nav::CAbstractNavigator::stop().
◆ stopWatchdog()
|
virtual |
Stop the watchdog timer.
- Returns
- false on any error.
- See also
- startWatchdog
Definition at line 47 of file CRobot2NavInterface.cpp.
References MRPT_LOG_INFO.
Referenced by mrpt::nav::CAbstractNavigator::navigationStep().

Member Data Documentation
◆ m_navtime
|
private |
For getNavigationTime.
Definition at line 197 of file CRobot2NavInterface.h.
Referenced by getNavigationTime(), and resetNavigationTimer().