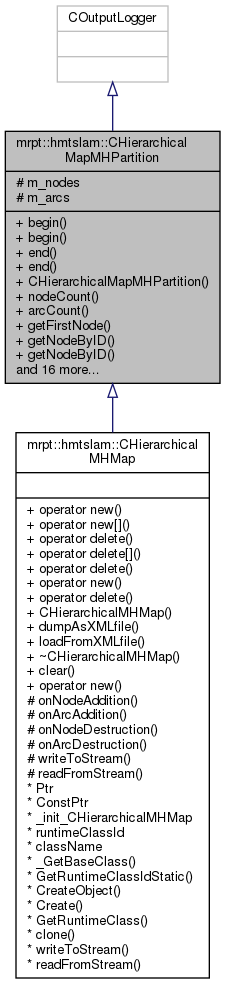
Detailed Description
Represents a set of nodes and arcs, posibly only a part of the whole hierarchical, multi-hypothesis map.
A usar will never create an instance of this class, rather it will employ CHierarchicalMHMap.
- See also
- CHierarchicalMHMap, CHMHMapArc, CHMHMapNode
Definition at line 39 of file CHierarchicalMapMHPartition.h.
#include <mrpt/hmtslam/CHierarchicalMapMHPartition.h>
Public Types | |
| typedef TNodeList::iterator | iterator |
| typedef TNodeList::const_iterator | const_iterator |
| typedef std::vector< CHMHMapNode::TNodeID > | TNodeIDsList |
| A type that reprensents a sequence of node IDs. More... | |
Public Member Functions | |
| const_iterator | begin () const |
| Returns an iterator to the first node in the graph. More... | |
| iterator | begin () |
| Returns an iterator to the first node in the graph. More... | |
| const_iterator | end () const |
| Returns an iterator to the end of the list of nodes in the graph. More... | |
| iterator | end () |
| Returns an iterator to the end of the list of nodes in the graph. More... | |
| CHierarchicalMapMHPartition () | |
| size_t | nodeCount () const |
| Returns the number of nodes in the partition: More... | |
| size_t | arcCount () const |
| Returns the number of arcs in the partition: More... | |
| CHMHMapNode::Ptr | getFirstNode () |
| Returns the first node in the graph, or nullptr if it does not exist. More... | |
| CHMHMapNode::Ptr | getNodeByID (CHMHMapNode::TNodeID id) |
| Returns the node with the given ID, or nullptr if it does not exist. More... | |
| const CHMHMapNode::Ptr | getNodeByID (CHMHMapNode::TNodeID id) const |
| Returns the node with the given ID, or nullptr if it does not exist. More... | |
| CHMHMapNode::Ptr | getNodeByLabel (const std::string &label, const THypothesisID &hypothesisID) |
| Returns the node with the given label (case insensitive) for some given hypothesis ID, or nullptr if it does not exist. More... | |
| const CHMHMapNode::Ptr | getNodeByLabel (const std::string &label, const THypothesisID &hypothesisID) const |
| Returns the node with the given label (case insensitive) for some given hypothesis ID, or nullptr if it does not exist. More... | |
| void | saveAreasDiagramForMATLAB (const std::string &filName, const CHMHMapNode::TNodeID &idReferenceNode, const THypothesisID &hypothesisID) const |
| Returns a partition of this graph only with nodes at a given level in the hierarchy (0=ground level,1=parent level,etc) More... | |
| void | saveAreasDiagramWithEllipsedForMATLAB (const std::string &filName, const CHMHMapNode::TNodeID &idReferenceNode, const THypothesisID &hypothesisID, float uncertaintyExagerationFactor=1.0f, bool drawArcs=false, unsigned int numberOfIterationsForOptimalGlobalPoses=4) const |
| Saves a MATLAB script that represents graphically the nodes with type="Area" in this hierarchical-map(partition), using the stated node as global coordinates reference, and drawing the ellipses of the localization uncertainty for each node. More... | |
| void | saveGlobalMapForMATLAB (const std::string &filName, const THypothesisID &hypothesisID, const CHMHMapNode::TNodeID &idReferenceNode) const |
| Saves a MATLAB script that represents graphically the reconstructed "global map" ADDITIONAL NOTES: More... | |
| void | findPathBetweenNodes (const CHMHMapNode::TNodeID &nodeFrom, const CHMHMapNode::TNodeID &nodeTo, const THypothesisID &hypothesisID, TArcList &out_path, bool direction=false) const |
| The Dijkstra algorithm for finding the shortest path between a pair of nodes. More... | |
| void | computeCoordinatesTransformationBetweenNodes (const CHMHMapNode::TNodeID &nodeFrom, const CHMHMapNode::TNodeID &nodeTo, mrpt::poses::CPose3DPDFParticles &posePDF, const THypothesisID &hypothesisID, unsigned int particlesCount=100, float additionalNoiseXYratio=0.02, float additionalNoisePhiRad=mrpt::utils::DEG2RAD(0.1)) const |
| Draw a number of samples according to the PDF of the coordinates transformation between a pair of "Area"'s nodes. More... | |
| float | computeMatchProbabilityBetweenNodes (const CHMHMapNode::TNodeID &nodeFrom, const CHMHMapNode::TNodeID &nodeTo, float &maxMatchProb, mrpt::poses::CPose3DPDFSOG &estimatedRelativePose, const THypothesisID &hypothesisID, unsigned int monteCarloSamplesPose=300) |
| Computes the probability [0,1] of two areas' gridmaps to "match" (loop closure), according to the grid maps and pose uncertainty from information in arcs (uses a Monte Carlo aproximation) If there is not enough information or a robust estimation cannot be found, there will not be particles in "estimatedRelativePose". More... | |
| void | findArcsBetweenNodes (const CHMHMapNode::TNodeID &node1, const CHMHMapNode::TNodeID &node2, const THypothesisID &hypothesisID, TArcList &out_listArcs) const |
| Returns all the arcs between a pair of nodes: More... | |
| void | findArcsOfTypeBetweenNodes (const CHMHMapNode::TNodeID &node1id, const CHMHMapNode::TNodeID &node2id, const THypothesisID &hypothesisID, const std::string &arcType, TArcList &ret) const |
| Returns the arcs between a pair of nodes of a given type. More... | |
| CHMHMapArc::Ptr | findArcOfTypeBetweenNodes (const CHMHMapNode::TNodeID &node1id, const CHMHMapNode::TNodeID &node2id, const THypothesisID &hypothesisID, const std::string &arcType, bool &isInverted) const |
| Returns the first arc between a pair of nodes of a given type, and if it is in the opposite direction. More... | |
| bool | areNodesNeightbour (const CHMHMapNode::TNodeID &node1, const CHMHMapNode::TNodeID &node2, const THypothesisID &hypothesisID, const char *requiredAnnotation=nullptr) const |
| Returns whether two nodes are "neightbour", i.e. More... | |
| void | computeGloballyConsistentNodeCoordinates (std::map< CHMHMapNode::TNodeID, mrpt::poses::CPose3DPDFGaussian, std::less< CHMHMapNode::TNodeID >, Eigen::aligned_allocator< std::pair< const CHMHMapNode::TNodeID, mrpt::poses::CPose3DPDFGaussian >>> &nodePoses, const CHMHMapNode::TNodeID &idReferenceNode, const THypothesisID &hypothesisID, const unsigned int &numberOfIterations=2) const |
| This methods implements a Lu&Milios-like globally optimal estimation for the global coordinates of all the nodes in the graph according to all available arcs with relative pose information. More... | |
| void | getAs3DScene (mrpt::opengl::COpenGLScene &outScene, const CHMHMapNode::TNodeID &idReferenceNode, const THypothesisID &hypothesisID, const unsigned int &numberOfIterationsForOptimalGlobalPoses=5, const bool &showRobotPoseIDs=true) const |
| Returns a 3D scene reconstruction of the hierarchical map. More... | |
| void | dumpAsText (utils::CStringList &s) const |
| Return a textual description of the whole graph. More... | |
| double | computeOverlapProbabilityBetweenNodes (const CHMHMapNode::TNodeID &nodeFrom, const CHMHMapNode::TNodeID &nodeTo, const THypothesisID &hypothesisID, const size_t &monteCarloSamples=100, const float margin_to_substract=6) const |
| Computes the probability [0,1] of two areas' gridmaps to overlap, via a Monte Carlo aproximation. More... | |
Protected Attributes | |
| TNodeList | m_nodes |
| The internal list of nodes and arcs in the whole hierarchical model. More... | |
| TArcList | m_arcs |
Member Typedef Documentation
◆ const_iterator
| typedef TNodeList::const_iterator mrpt::hmtslam::CHierarchicalMapMHPartition::const_iterator |
Definition at line 51 of file CHierarchicalMapMHPartition.h.
◆ iterator
| typedef TNodeList::iterator mrpt::hmtslam::CHierarchicalMapMHPartition::iterator |
Definition at line 50 of file CHierarchicalMapMHPartition.h.
◆ TNodeIDsList
| typedef std::vector<CHMHMapNode::TNodeID> mrpt::hmtslam::CHierarchicalMapMHPartition::TNodeIDsList |
A type that reprensents a sequence of node IDs.
Definition at line 64 of file CHierarchicalMapMHPartition.h.
Constructor & Destructor Documentation
◆ CHierarchicalMapMHPartition()
|
inline |
Definition at line 61 of file CHierarchicalMapMHPartition.h.
Member Function Documentation
◆ arcCount()
| size_t CHierarchicalMapMHPartition::arcCount | ( | ) | const |
Returns the number of arcs in the partition:
Definition at line 44 of file CHierarchicalMapMHPartition.cpp.
◆ areNodesNeightbour()
| bool CHierarchicalMapMHPartition::areNodesNeightbour | ( | const CHMHMapNode::TNodeID & | node1, |
| const CHMHMapNode::TNodeID & | node2, | ||
| const THypothesisID & | hypothesisID, | ||
| const char * | requiredAnnotation = nullptr |
||
| ) | const |
Returns whether two nodes are "neightbour", i.e.
have a direct arc between them
Definition at line 1072 of file CHierarchicalMapMHPartition.cpp.
References MRPT_END, and MRPT_START.
◆ begin() [1/2]
|
inline |
Returns an iterator to the first node in the graph.
Definition at line 56 of file CHierarchicalMapMHPartition.h.
References m_nodes.
◆ begin() [2/2]
|
inline |
Returns an iterator to the first node in the graph.
Definition at line 54 of file CHierarchicalMapMHPartition.h.
References m_nodes.
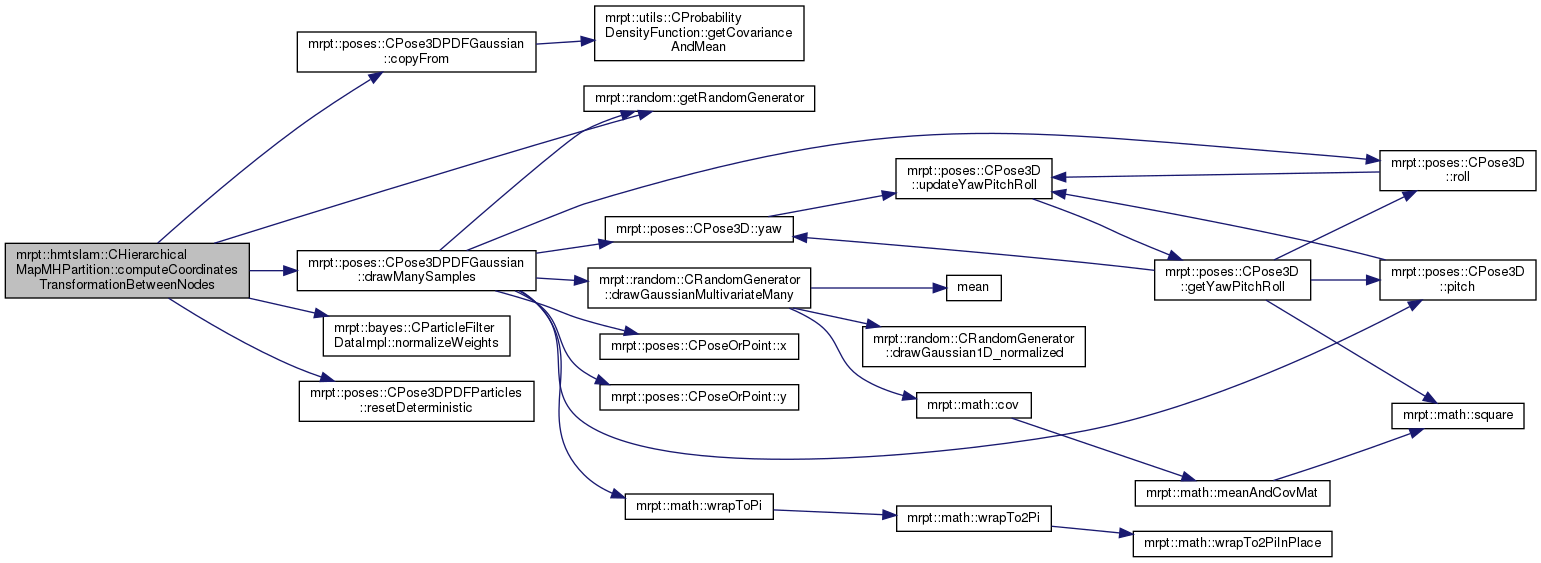
◆ computeCoordinatesTransformationBetweenNodes()
| void CHierarchicalMapMHPartition::computeCoordinatesTransformationBetweenNodes | ( | const CHMHMapNode::TNodeID & | nodeFrom, |
| const CHMHMapNode::TNodeID & | nodeTo, | ||
| mrpt::poses::CPose3DPDFParticles & | posePDF, | ||
| const THypothesisID & | hypothesisID, | ||
| unsigned int | particlesCount = 100, |
||
| float | additionalNoiseXYratio = 0.02, |
||
| float | additionalNoisePhiRad = mrpt::utils::DEG2RAD(0.1) |
||
| ) | const |
Draw a number of samples according to the PDF of the coordinates transformation between a pair of "Area"'s nodes.
- Exceptions
-
std::exception If there is not enought information in arcs to compute the PDF
Definition at line 865 of file CHierarchicalMapMHPartition.cpp.
References ARC_ANNOTATION_DELTA, ARC_ANNOTATION_DELTA_SRC_POSEID, ARC_ANNOTATION_DELTA_TRG_POSEID, ASSERT_, mrpt::poses::CPose3DPDFGaussian::copyFrom(), mrpt::poses::CPose3DPDFGaussian::drawManySamples(), mrpt::random::getRandomGenerator(), mrpt::bayes::CParticleFilterData< T >::m_particles, MRPT_END, MRPT_START, NODE_ANNOTATION_REF_POSEID, mrpt::bayes::CParticleFilterDataImpl< Derived, particle_list_t >::normalizeWeights(), and mrpt::poses::CPose3DPDFParticles::resetDeterministic().
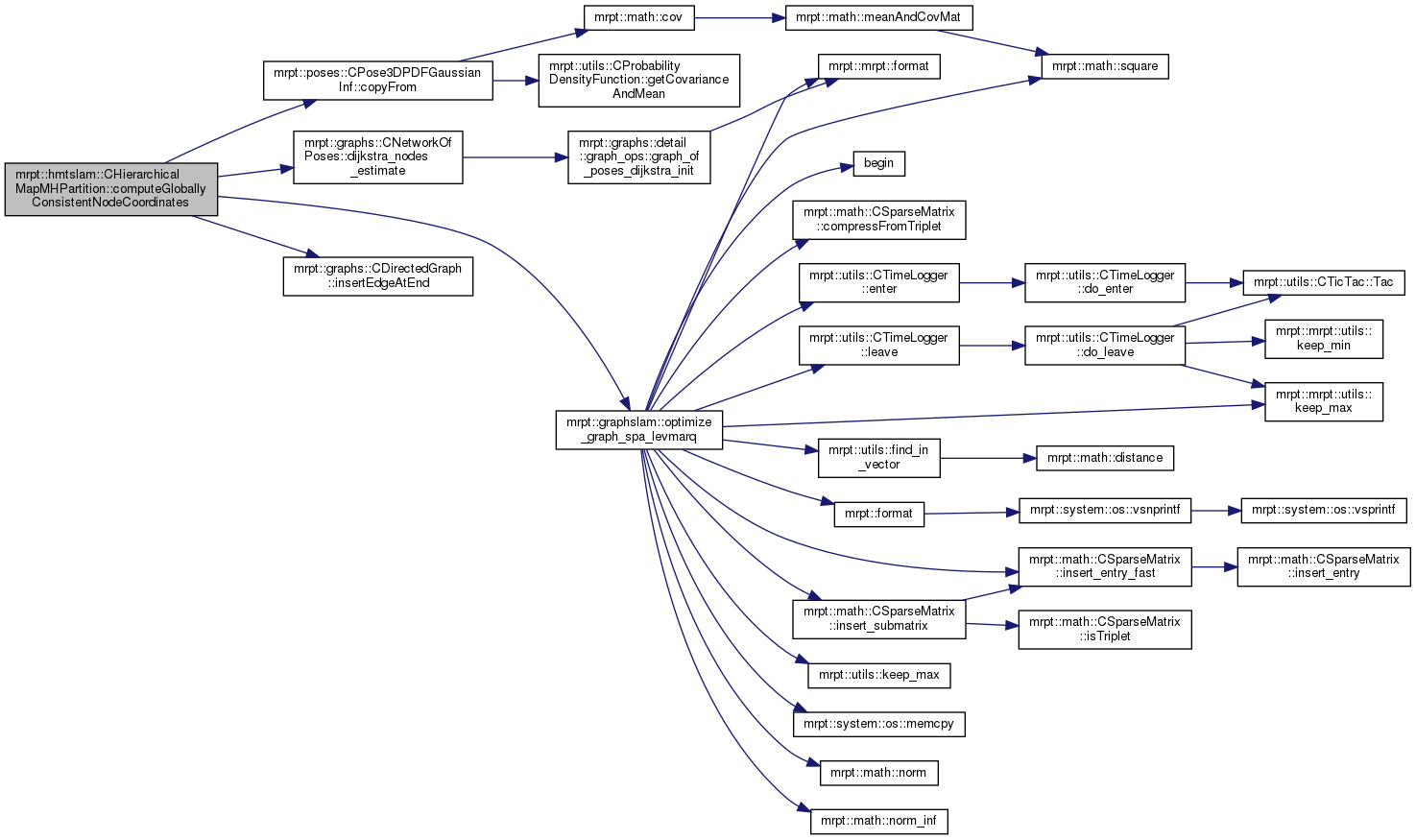
◆ computeGloballyConsistentNodeCoordinates()
| void CHierarchicalMapMHPartition::computeGloballyConsistentNodeCoordinates | ( | std::map< CHMHMapNode::TNodeID, mrpt::poses::CPose3DPDFGaussian, std::less< CHMHMapNode::TNodeID >, Eigen::aligned_allocator< std::pair< const CHMHMapNode::TNodeID, mrpt::poses::CPose3DPDFGaussian >>> & | nodePoses, |
| const CHMHMapNode::TNodeID & | idReferenceNode, | ||
| const THypothesisID & | hypothesisID, | ||
| const unsigned int & | numberOfIterations = 2 |
||
| ) | const |
This methods implements a Lu&Milios-like globally optimal estimation for the global coordinates of all the nodes in the graph according to all available arcs with relative pose information.
Global coordinates will be computed relative to the node "idReferenceNode".
- Exceptions
-
std::exception If there is any node without a pose arc, invalid (non invertible) matrixes, etc...
Definition at line 1328 of file CHierarchicalMapMHPartition.cpp.
References ARC_ANNOTATION_DELTA, mrpt::poses::CPose3DPDFGaussianInf::copyFrom(), mrpt::poses::CPose3DPDFGaussian::cov, mrpt::graphs::CNetworkOfPoses< CPOSE, MAPS_IMPLEMENTATION, NODE_ANNOTATIONS, EDGE_ANNOTATIONS >::dijkstra_nodes_estimate(), mrpt::graphs::CDirectedGraph< TYPE_EDGES, EDGE_ANNOTATIONS >::insertEdgeAtEnd(), mrpt::poses::CPose3DPDFGaussian::mean, MRPT_END, MRPT_START, mrpt::graphs::CNetworkOfPoses< CPOSE, MAPS_IMPLEMENTATION, NODE_ANNOTATIONS, EDGE_ANNOTATIONS >::nodes, mrpt::graphslam::optimize_graph_spa_levmarq(), and mrpt::graphs::CNetworkOfPoses< CPOSE, MAPS_IMPLEMENTATION, NODE_ANNOTATIONS, EDGE_ANNOTATIONS >::root.
◆ computeMatchProbabilityBetweenNodes()
| float CHierarchicalMapMHPartition::computeMatchProbabilityBetweenNodes | ( | const CHMHMapNode::TNodeID & | nodeFrom, |
| const CHMHMapNode::TNodeID & | nodeTo, | ||
| float & | maxMatchProb, | ||
| mrpt::poses::CPose3DPDFSOG & | estimatedRelativePose, | ||
| const THypothesisID & | hypothesisID, | ||
| unsigned int | monteCarloSamplesPose = 300 |
||
| ) |
Computes the probability [0,1] of two areas' gridmaps to "match" (loop closure), according to the grid maps and pose uncertainty from information in arcs (uses a Monte Carlo aproximation) If there is not enough information or a robust estimation cannot be found, there will not be particles in "estimatedRelativePose".
Definition at line 994 of file CHierarchicalMapMHPartition.cpp.
References MRPT_END, MRPT_START, MRPT_UNUSED_PARAM, and THROW_EXCEPTION.
◆ computeOverlapProbabilityBetweenNodes()
| double CHierarchicalMapMHPartition::computeOverlapProbabilityBetweenNodes | ( | const CHMHMapNode::TNodeID & | nodeFrom, |
| const CHMHMapNode::TNodeID & | nodeTo, | ||
| const THypothesisID & | hypothesisID, | ||
| const size_t & | monteCarloSamples = 100, |
||
| const float | margin_to_substract = 6 |
||
| ) | const |
Computes the probability [0,1] of two areas' gridmaps to overlap, via a Monte Carlo aproximation.
- Exceptions
-
std::exception If there is not enought information in arcs, etc...
- Parameters
-
margin_to_substract In meters, the area of each gridmap is "eroded" this amount to compensate the area in excess usually found in gridmaps.
Definition at line 1583 of file CHierarchicalMapMHPartition.cpp.
References ASSERT_, mrpt::bayes::CParticleFilterData< T >::m_particles, MRPT_END, MRPT_START, NODE_ANNOTATION_METRIC_MAPS, and mrpt::math::RectanglesIntersection().

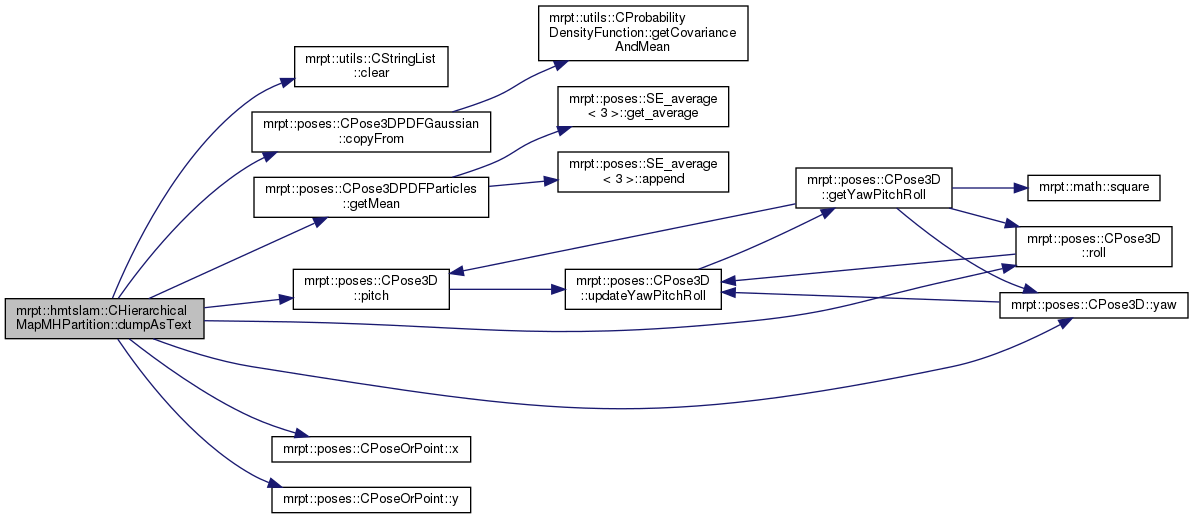
◆ dumpAsText()
| void CHierarchicalMapMHPartition::dumpAsText | ( | utils::CStringList & | s | ) | const |
Return a textual description of the whole graph.
Definition at line 1408 of file CHierarchicalMapMHPartition.cpp.
References ARC_ANNOTATION_DELTA, ARC_ANNOTATION_DELTA_SRC_POSEID, ARC_ANNOTATION_DELTA_TRG_POSEID, ASSERT_, mrpt::utils::CStringList::clear(), mrpt::poses::CPose3DPDFGaussian::copyFrom(), mrpt::poses::CPose3DPDFParticles::getMean(), mrpt::poses::CPose3DPDFGaussian::mean, NODE_ANNOTATION_POSES_GRAPH, NODE_ANNOTATION_REF_POSEID, mrpt::poses::CPose3D::pitch(), RAD2DEG, mrpt::poses::CPose3D::roll(), mrpt::poses::CPoseOrPoint< DERIVEDCLASS >::x(), mrpt::poses::CPoseOrPoint< DERIVEDCLASS >::y(), and mrpt::poses::CPose3D::yaw().
◆ end() [1/2]
|
inline |
Returns an iterator to the end of the list of nodes in the graph.
Definition at line 60 of file CHierarchicalMapMHPartition.h.
References m_nodes.
◆ end() [2/2]
|
inline |
Returns an iterator to the end of the list of nodes in the graph.
Definition at line 58 of file CHierarchicalMapMHPartition.h.
References m_nodes.
◆ findArcOfTypeBetweenNodes()
| CHMHMapArc::Ptr CHierarchicalMapMHPartition::findArcOfTypeBetweenNodes | ( | const CHMHMapNode::TNodeID & | node1id, |
| const CHMHMapNode::TNodeID & | node2id, | ||
| const THypothesisID & | hypothesisID, | ||
| const std::string & | arcType, | ||
| bool & | isInverted | ||
| ) | const |
Returns the first arc between a pair of nodes of a given type, and if it is in the opposite direction.
- Returns
- The arc, or nullptr if not found.
Definition at line 1549 of file CHierarchicalMapMHPartition.cpp.
References MRPT_END, and MRPT_START.
◆ findArcsBetweenNodes()
| void CHierarchicalMapMHPartition::findArcsBetweenNodes | ( | const CHMHMapNode::TNodeID & | node1, |
| const CHMHMapNode::TNodeID & | node2, | ||
| const THypothesisID & | hypothesisID, | ||
| TArcList & | out_listArcs | ||
| ) | const |
Returns all the arcs between a pair of nodes:
Definition at line 1013 of file CHierarchicalMapMHPartition.cpp.
References MRPT_END, and MRPT_START.
◆ findArcsOfTypeBetweenNodes()
| void CHierarchicalMapMHPartition::findArcsOfTypeBetweenNodes | ( | const CHMHMapNode::TNodeID & | node1id, |
| const CHMHMapNode::TNodeID & | node2id, | ||
| const THypothesisID & | hypothesisID, | ||
| const std::string & | arcType, | ||
| TArcList & | ret | ||
| ) | const |
Returns the arcs between a pair of nodes of a given type.
Definition at line 1042 of file CHierarchicalMapMHPartition.cpp.
References MRPT_END, and MRPT_START.
◆ findPathBetweenNodes()
| void CHierarchicalMapMHPartition::findPathBetweenNodes | ( | const CHMHMapNode::TNodeID & | nodeFrom, |
| const CHMHMapNode::TNodeID & | nodeTo, | ||
| const THypothesisID & | hypothesisID, | ||
| TArcList & | out_path, | ||
| bool | direction = false |
||
| ) | const |
The Dijkstra algorithm for finding the shortest path between a pair of nodes.
- Returns
- The sequence of arcs connecting the nodes.It will be empty if no path is found or when the starting and ending node coincide.
Definition at line 735 of file CHierarchicalMapMHPartition.cpp.
References ASSERT_, ASSERTMSG_, MRPT_END, and MRPT_START.
◆ getAs3DScene()
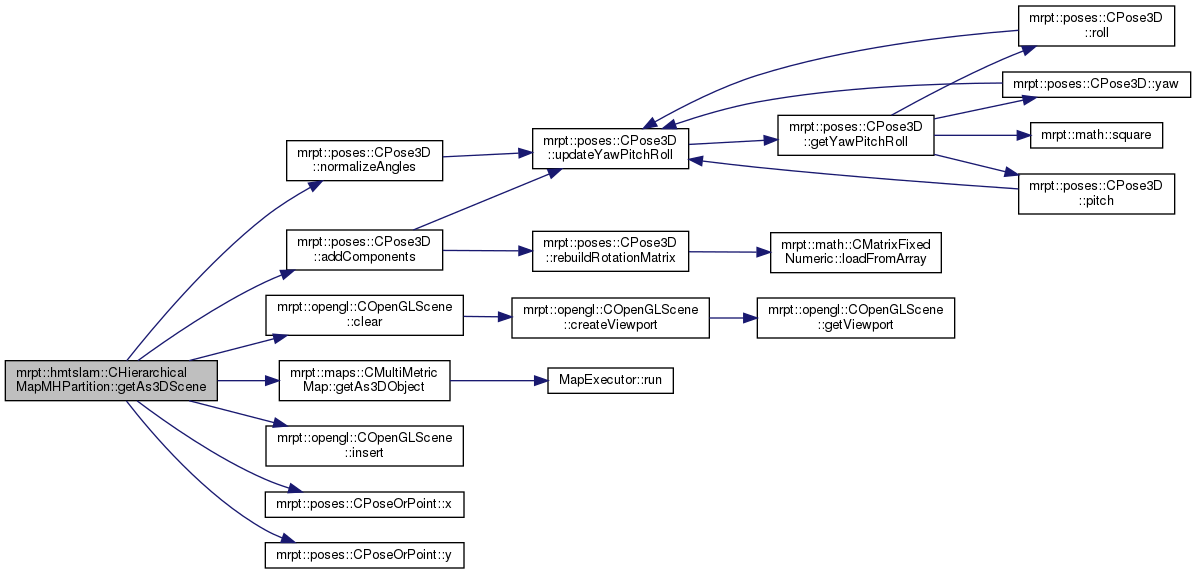
| void CHierarchicalMapMHPartition::getAs3DScene | ( | mrpt::opengl::COpenGLScene & | outScene, |
| const CHMHMapNode::TNodeID & | idReferenceNode, | ||
| const THypothesisID & | hypothesisID, | ||
| const unsigned int & | numberOfIterationsForOptimalGlobalPoses = 5, |
||
| const bool & | showRobotPoseIDs = true |
||
| ) | const |
Returns a 3D scene reconstruction of the hierarchical map.
See "computeGloballyConsistentNodeCoordinates" for the meaning of "numberOfIterationsForOptimalGlobalPoses"
Definition at line 1108 of file CHierarchicalMapMHPartition.cpp.
References mrpt::poses::CPose3D::addComponents(), mrpt::opengl::COpenGLScene::clear(), mrpt::opengl::COpenGLScene::insert(), MRPT_END, MRPT_START, NODE_ANNOTATION_METRIC_MAPS, NODE_ANNOTATION_POSES_GRAPH, mrpt::poses::CPose3D::normalizeAngles(), mrpt::poses::CPoseOrPoint< DERIVEDCLASS >::x(), and mrpt::poses::CPoseOrPoint< DERIVEDCLASS >::y().
◆ getFirstNode()
| CHMHMapNode::Ptr CHierarchicalMapMHPartition::getFirstNode | ( | ) |
Returns the first node in the graph, or nullptr if it does not exist.
- Returns
- A pointer to the object. DO NOT DELETE this object, if you want to modify it in someway, first obtain a copy by invoking "CSerializable::duplicate"
Definition at line 118 of file CHierarchicalMapMHPartition.cpp.
◆ getNodeByID() [1/2]
| CHMHMapNode::Ptr CHierarchicalMapMHPartition::getNodeByID | ( | CHMHMapNode::TNodeID | id | ) |
Returns the node with the given ID, or nullptr if it does not exist.
- Returns
- A pointer to the object. DO NOT DELETE this object, if you want to modify it in someway, first obtain a copy by invoking "CSerializable::duplicate"
Definition at line 48 of file CHierarchicalMapMHPartition.cpp.
References AREAID_INVALID, MRPT_END, and MRPT_START.
◆ getNodeByID() [2/2]
| const CHMHMapNode::Ptr CHierarchicalMapMHPartition::getNodeByID | ( | CHMHMapNode::TNodeID | id | ) | const |
Returns the node with the given ID, or nullptr if it does not exist.
- Returns
- A pointer to the object. DO NOT DELETE this object, if you want to modify it in someway, first obtain a copy by invoking "CSerializable::duplicate"
Definition at line 62 of file CHierarchicalMapMHPartition.cpp.
References AREAID_INVALID, MRPT_END, and MRPT_START.
◆ getNodeByLabel() [1/2]
| CHMHMapNode::Ptr CHierarchicalMapMHPartition::getNodeByLabel | ( | const std::string & | label, |
| const THypothesisID & | hypothesisID | ||
| ) |
Returns the node with the given label (case insensitive) for some given hypothesis ID, or nullptr if it does not exist.
- Returns
- A pointer to the object. DO NOT DELETE this object, if you want to modify it in someway, first obtain a copy by invoking "CSerializable::duplicate"
Definition at line 77 of file CHierarchicalMapMHPartition.cpp.
References mrpt::system::os::_strcmpi(), MRPT_END, and MRPT_START.

◆ getNodeByLabel() [2/2]
| const CHMHMapNode::Ptr CHierarchicalMapMHPartition::getNodeByLabel | ( | const std::string & | label, |
| const THypothesisID & | hypothesisID | ||
| ) | const |
Returns the node with the given label (case insensitive) for some given hypothesis ID, or nullptr if it does not exist.
- Returns
- A pointer to the object. DO NOT DELETE this object, if you want to modify it in someway, first obtain a copy by invoking "CSerializable::duplicate"
Definition at line 97 of file CHierarchicalMapMHPartition.cpp.
References mrpt::system::os::_strcmpi(), MRPT_END, and MRPT_START.

◆ nodeCount()
| size_t CHierarchicalMapMHPartition::nodeCount | ( | ) | const |
Returns the number of nodes in the partition:
Definition at line 40 of file CHierarchicalMapMHPartition.cpp.
◆ saveAreasDiagramForMATLAB()
| void CHierarchicalMapMHPartition::saveAreasDiagramForMATLAB | ( | const std::string & | filName, |
| const CHMHMapNode::TNodeID & | idReferenceNode, | ||
| const THypothesisID & | hypothesisID | ||
| ) | const |
Returns a partition of this graph only with nodes at a given level in the hierarchy (0=ground level,1=parent level,etc)
- The partition may be empty if no node fulfills the condition.
- All arcs STARTING at each node from the partition will be added to the partition as well.
- Levels in the hierarchy here stands for arcs of type "arcType_Belongs" only.
- See also
- CHMHMapArc Saves a MATLAB script that represents graphically the nodes with type="Area" in this hierarchical-map(partition), using the stated node as global coordinates reference. ADDITIONAL NOTES:
- Coordinates are computed simply as the mean value of the first arc with an annotation "RelativePose", added to the pose of the original node.
- If the coordinates of any node can not be computed (no arcs,...), an exception will be raised.
Definition at line 129 of file CHierarchicalMapMHPartition.cpp.
References MRPT_UNUSED_PARAM.
◆ saveAreasDiagramWithEllipsedForMATLAB()
| void CHierarchicalMapMHPartition::saveAreasDiagramWithEllipsedForMATLAB | ( | const std::string & | filName, |
| const CHMHMapNode::TNodeID & | idReferenceNode, | ||
| const THypothesisID & | hypothesisID, | ||
| float | uncertaintyExagerationFactor = 1.0f, |
||
| bool | drawArcs = false, |
||
| unsigned int | numberOfIterationsForOptimalGlobalPoses = 4 |
||
| ) | const |
Saves a MATLAB script that represents graphically the nodes with type="Area" in this hierarchical-map(partition), using the stated node as global coordinates reference, and drawing the ellipses of the localization uncertainty for each node.
ADDITIONAL NOTES:
- Coordinates are computed simply as the mean value of the first arc with an annotation "RelativePose", added to the pose of the original node.
- If the coordinates of any node can not be computed (no arcs,...), an exception will be raised.
Definition at line 308 of file CHierarchicalMapMHPartition.cpp.
References MRPT_UNUSED_PARAM.
◆ saveGlobalMapForMATLAB()
| void CHierarchicalMapMHPartition::saveGlobalMapForMATLAB | ( | const std::string & | filName, |
| const THypothesisID & | hypothesisID, | ||
| const CHMHMapNode::TNodeID & | idReferenceNode | ||
| ) | const |
Saves a MATLAB script that represents graphically the reconstructed "global map" ADDITIONAL NOTES:
- Coordinates are computed simply as the mean value of the first arc with an annotation "RelativePose", added to the pose of the original node.
- If the coordinates of any node can not be computed (no arcs,...), an exception will be raised.
Definition at line 487 of file CHierarchicalMapMHPartition.cpp.
References MRPT_END, MRPT_START, and MRPT_UNUSED_PARAM.
Member Data Documentation
◆ m_arcs
|
protected |
Definition at line 47 of file CHierarchicalMapMHPartition.h.
◆ m_nodes
|
protected |
The internal list of nodes and arcs in the whole hierarchical model.
The objects must be deleted only in the CHierarchicalMap class, not in partitions only objects.
Definition at line 46 of file CHierarchicalMapMHPartition.h.