Namespaces | |
| detail | |
Classes | |
| struct | CProfilerProxy |
| class | PointCloudAdapter |
| An adapter to different kinds of point cloud object. More... | |
Typedefs | |
| typedef unsigned long | POINTER_TYPE |
| For performing type casting from a pointer to its numeric value. More... | |
| typedef uint64_t | TNodeID |
| The type for node IDs in graphs of different types. More... | |
| typedef std::pair< TNodeID, TNodeID > | TPairNodeIDs |
| A pair of node IDs. More... | |
Functions | |
| void | global_profiler_enter (const char *func_name) noexcept |
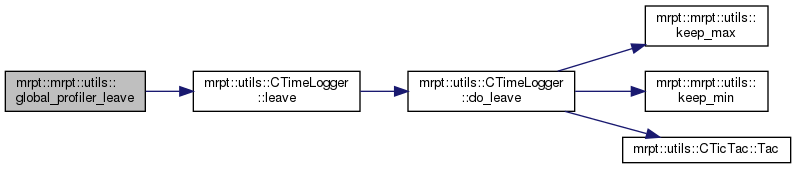
| void | global_profiler_leave (const char *func_name) noexcept |
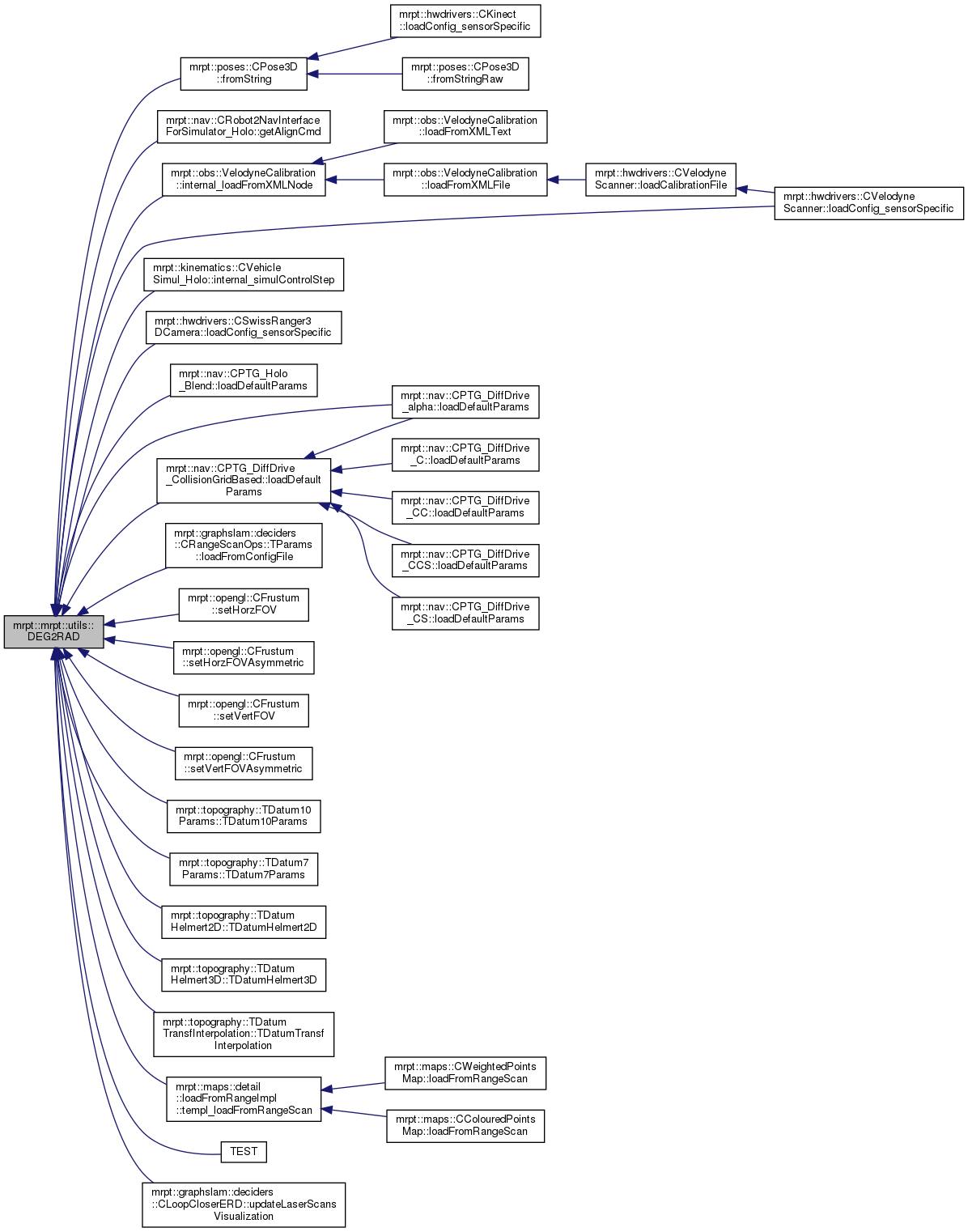
| double | DEG2RAD (const double x) |
| Degrees to radians. More... | |
| float | DEG2RAD (const float x) |
| Degrees to radians. More... | |
| float | DEG2RAD (const int x) |
| Degrees to radians. More... | |
| double | RAD2DEG (const double x) |
| Radians to degrees. More... | |
| float | RAD2DEG (const float x) |
| Radians to degrees. More... | |
| template<typename T > | |
| int | sign (T x) |
| Returns the sign of X as "1" or "-1". More... | |
| template<typename T > | |
| int | signWithZero (T x) |
| Returns the sign of X as "0", "1" or "-1". More... | |
| template<typename T > | |
| T | lowestPositive (const T a, const T b) |
| Returns the lowest, possitive among two numbers. More... | |
| template<typename T > | |
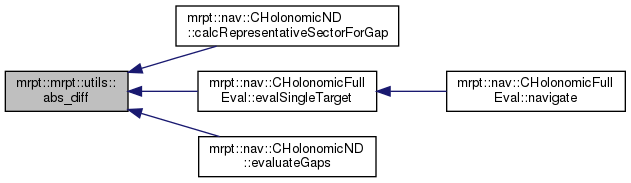
| T | abs_diff (const T a, const T b) |
| Efficient and portable evaluation of the absolute difference of two unsigned integer values (but will also work for signed and floating point types) More... | |
| template<typename T > | |
| const T | min3 (const T &A, const T &B, const T &C) |
| template<typename T > | |
| const T | max3 (const T &A, const T &B, const T &C) |
| template<typename T > | |
| int | fix (T x) |
| Rounds toward zero. More... | |
| template<class R , class SMART_PTR > | |
| R * | getAs (SMART_PTR &o) |
| Utility to get a cast'ed pointer from a smart pointer. More... | |
| template<class R , class SMART_PTR > | |
| const R * | getAs (const SMART_PTR &o) |
| Utility to get a cast'ed pointer from a smart pointer. More... | |
| void | reverseBytesInPlace (bool &v_in_out) |
| Reverse the order of the bytes of a given type (useful for transforming btw little/big endian) More... | |
| void | reverseBytesInPlace (uint8_t &v_in_out) |
| void | reverseBytesInPlace (int8_t &v_in_out) |
| void | reverseBytesInPlace (uint16_t &v_in_out) |
| void | reverseBytesInPlace (int16_t &v_in_out) |
| void | reverseBytesInPlace (uint32_t &v_in_out) |
| void | reverseBytesInPlace (int32_t &v_in_out) |
| void | reverseBytesInPlace (uint64_t &v_in_out) |
| void | reverseBytesInPlace (int64_t &v_in_out) |
| void | reverseBytesInPlace (float &v_in_out) |
| void | reverseBytesInPlace (double &v_in_out) |
| template<class T > | |
| void | reverseBytes (const T &v_in, T &v_out) |
| Reverse the order of the bytes of a given type (useful for transforming btw little/big endian) More... | |
| template<typename T , typename K > | |
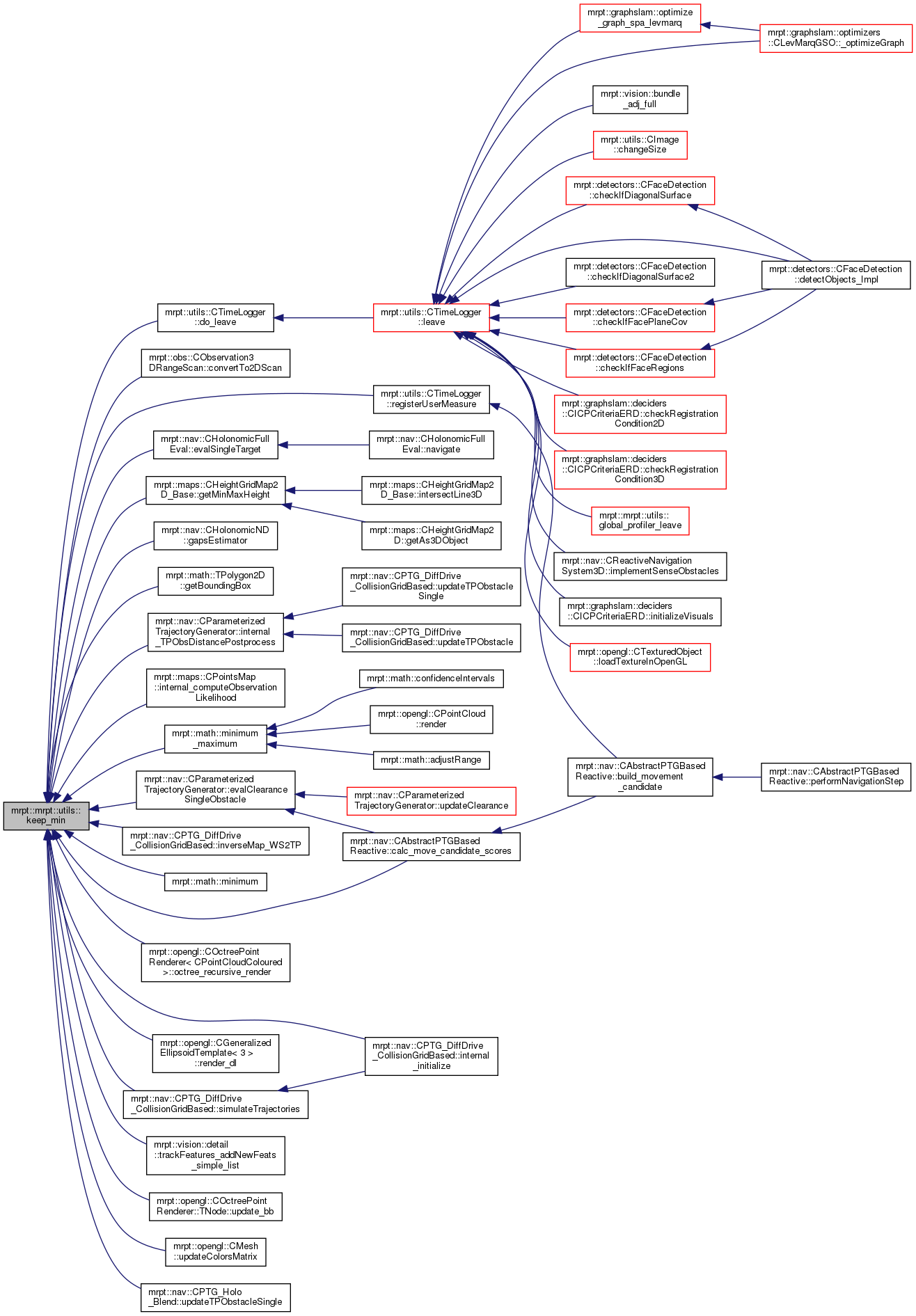
| void | keep_min (T &var, const K test_val) |
| If the second argument is below the first one, set the first argument to this lower value. More... | |
| template<typename T , typename K > | |
| void | keep_max (T &var, const K test_val) |
| If the second argument is above the first one, set the first argument to this higher value. More... | |
| template<typename T > | |
| void | saturate (T &var, const T sat_min, const T sat_max) |
| Saturate the value of var (the variable gets modified) so it does not get out of [min,max]. More... | |
| template<typename T > | |
| T | saturate_val (const T &value, const T sat_min, const T sat_max) |
| Like saturate() but it returns the value instead of modifying the variable. More... | |
| template<class T > | |
| void | delete_safe (T *&ptr) |
| Calls "delete" to free an object only if the pointer is not nullptr, then set the pointer to NULL. More... | |
| template<class VECTOR_T > | |
| void | vector_strong_clear (VECTOR_T &v) |
| Like calling a std::vector<>'s clear() method, but really forcing deallocating the memory. More... | |
| template<typename T > | |
| T | length2length4N (T len) |
| Returns the smaller number >=len such that it's a multiple of 4. More... | |
Function Documentation
◆ abs_diff()
|
inline |
Efficient and portable evaluation of the absolute difference of two unsigned integer values (but will also work for signed and floating point types)
Definition at line 150 of file CColouredPointsMap.h.
Referenced by mrpt::nav::CHolonomicND::calcRepresentativeSectorForGap(), mrpt::nav::CHolonomicFullEval::evalSingleTarget(), and mrpt::nav::CHolonomicND::evaluateGaps().
◆ DEG2RAD() [1/3]
|
inline |
Degrees to radians.
Definition at line 96 of file CColouredPointsMap.h.
Referenced by mrpt::poses::CPose3D::fromString(), mrpt::nav::CRobot2NavInterfaceForSimulator_Holo::getAlignCmd(), mrpt::obs::VelodyneCalibration::internal_loadFromXMLNode(), mrpt::kinematics::CVehicleSimul_Holo::internal_simulControlStep(), mrpt::hwdrivers::CSwissRanger3DCamera::loadConfig_sensorSpecific(), mrpt::hwdrivers::CVelodyneScanner::loadConfig_sensorSpecific(), mrpt::nav::CPTG_Holo_Blend::loadDefaultParams(), mrpt::nav::CPTG_DiffDrive_alpha::loadDefaultParams(), mrpt::nav::CPTG_DiffDrive_CollisionGridBased::loadDefaultParams(), mrpt::graphslam::deciders::CRangeScanOps< GRAPH_T >::TParams::loadFromConfigFile(), mrpt::opengl::CFrustum::setHorzFOV(), mrpt::opengl::CFrustum::setHorzFOVAsymmetric(), mrpt::opengl::CFrustum::setVertFOV(), mrpt::opengl::CFrustum::setVertFOVAsymmetric(), mrpt::topography::TDatum10Params::TDatum10Params(), mrpt::topography::TDatum7Params::TDatum7Params(), mrpt::topography::TDatumHelmert2D::TDatumHelmert2D(), mrpt::topography::TDatumHelmert3D::TDatumHelmert3D(), mrpt::topography::TDatumTransfInterpolation::TDatumTransfInterpolation(), mrpt::maps::detail::loadFromRangeImpl< Derived >::templ_loadFromRangeScan(), TEST(), and mrpt::graphslam::deciders::CLoopCloserERD< GRAPH_T >::updateLaserScansVisualization().
◆ DEG2RAD() [2/3]
|
inline |
Degrees to radians.
Definition at line 98 of file CColouredPointsMap.h.
◆ DEG2RAD() [3/3]
|
inline |
Degrees to radians.
Definition at line 100 of file CColouredPointsMap.h.
◆ delete_safe()
| void mrpt::mrpt::utils::delete_safe | ( | T *& | ptr | ) |
Calls "delete" to free an object only if the pointer is not nullptr, then set the pointer to NULL.
Definition at line 253 of file CColouredPointsMap.h.
◆ fix()
|
inline |
Rounds toward zero.
Definition at line 168 of file CColouredPointsMap.h.
References mrpt::maps::CColouredPointsMap::insertPoint().

◆ getAs() [1/2]
|
inline |
Utility to get a cast'ed pointer from a smart pointer.
Definition at line 179 of file CColouredPointsMap.h.
References mrpt::maps::CColouredPointsMap::insertPoint().

◆ getAs() [2/2]
|
inline |
Utility to get a cast'ed pointer from a smart pointer.
Definition at line 186 of file CColouredPointsMap.h.
◆ global_profiler_enter()
|
noexcept |
Definition at line 44 of file CTimeLogger.cpp.
References mrpt::utils::CTimeLogger::enter(), and global_profiler.
Referenced by mrpt::utils::CProfilerProxy::CProfilerProxy().


◆ global_profiler_leave()
|
noexcept |
Definition at line 48 of file CTimeLogger.cpp.
References global_profiler, and mrpt::utils::CTimeLogger::leave().
Referenced by mrpt::utils::CProfilerProxy::~CProfilerProxy().

◆ keep_max()
|
inline |
If the second argument is above the first one, set the first argument to this higher value.
Definition at line 227 of file CColouredPointsMap.h.
Referenced by mrpt::nav::CMultiObjectiveMotionOptimizerBase::decide(), mrpt::utils::CTimeLogger::do_leave(), mrpt::nav::CPTG_RobotShape_Polygonal::evalClearanceToRobotShape(), mrpt::nav::CHolonomicFullEval::evalSingleTarget(), mrpt::math::MatrixBlockSparseCols< Scalar, NROWS, NCOLS, INFO, HAS_REMAP, INDEX_REMAP_MAP_IMPL >::findCurrentNumberOfRows(), mrpt::nav::CHolonomicND::gapsEstimator(), mrpt::math::TPolygon2D::getBoundingBox(), mrpt::vision::TSimpleFeatureList_templ< TSimpleFeature >::getMaxID(), mrpt::vision::CFeatureList::getMaxID(), mrpt::maps::CHeightGridMap2D_Base::getMinMaxHeight(), mrpt::nav::CPTG_DiffDrive_CollisionGridBased::internal_initialize(), mrpt::nav::CPTG_DiffDrive_CollisionGridBased::inverseMap_WS2TP(), mrpt::nav::CParameterizedTrajectoryGenerator::loadFromConfigFile(), mrpt::math::maximum(), mrpt::math::minimum_maximum(), mrpt::opengl::COctreePointRenderer< CPointCloudColoured >::octree_recursive_render(), mrpt::graphslam::optimize_graph_spa_levmarq(), mrpt::hwdrivers::CGPSInterface::parseBuffer(), mrpt::utils::CTimeLogger::registerUserMeasure(), mrpt::opengl::CGeneralizedEllipsoidTemplate< 3 >::render_dl(), mrpt::nav::PlannerTPS_VirtualBase::renderMoveTree(), mrpt::nav::CPTG_RobotShape_Polygonal::setRobotShape(), mrpt::nav::CPTG_DiffDrive_CollisionGridBased::simulateTrajectories(), mrpt::nav::PlannerRRT_SE2_TPS::solve(), mrpt::opengl::COctreePointRenderer< Derived >::TNode::update_bb(), mrpt::opengl::CMesh::updateColorsMatrix(), and mrpt::vision::CMatchedFeatureList::updateMaxID().

◆ keep_min()
|
inline |
If the second argument is below the first one, set the first argument to this lower value.
Definition at line 220 of file CColouredPointsMap.h.
Referenced by mrpt::nav::CAbstractPTGBasedReactive::calc_move_candidate_scores(), mrpt::obs::CObservation3DRangeScan::convertTo2DScan(), mrpt::utils::CTimeLogger::do_leave(), mrpt::nav::CParameterizedTrajectoryGenerator::evalClearanceSingleObstacle(), mrpt::nav::CHolonomicFullEval::evalSingleTarget(), mrpt::nav::CHolonomicND::gapsEstimator(), mrpt::math::TPolygon2D::getBoundingBox(), mrpt::maps::CHeightGridMap2D_Base::getMinMaxHeight(), mrpt::maps::CPointsMap::internal_computeObservationLikelihood(), mrpt::nav::CPTG_DiffDrive_CollisionGridBased::internal_initialize(), mrpt::nav::CParameterizedTrajectoryGenerator::internal_TPObsDistancePostprocess(), mrpt::nav::CPTG_DiffDrive_CollisionGridBased::inverseMap_WS2TP(), mrpt::math::minimum(), mrpt::math::minimum_maximum(), mrpt::opengl::COctreePointRenderer< CPointCloudColoured >::octree_recursive_render(), mrpt::utils::CTimeLogger::registerUserMeasure(), mrpt::opengl::CGeneralizedEllipsoidTemplate< 3 >::render_dl(), mrpt::nav::CPTG_DiffDrive_CollisionGridBased::simulateTrajectories(), mrpt::vision::detail::trackFeatures_addNewFeats_simple_list(), mrpt::opengl::COctreePointRenderer< Derived >::TNode::update_bb(), mrpt::opengl::CMesh::updateColorsMatrix(), and mrpt::nav::CPTG_Holo_Blend::updateTPObstacleSingle().
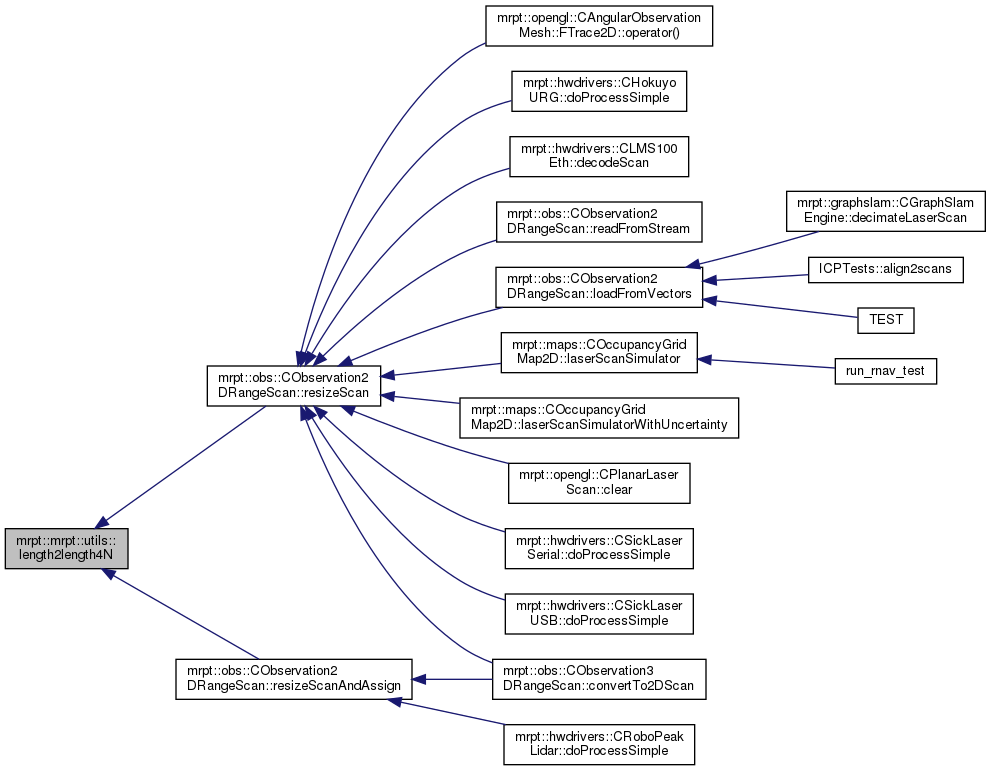
◆ length2length4N()
| T mrpt::mrpt::utils::length2length4N | ( | T | len | ) |
Returns the smaller number >=len such that it's a multiple of 4.
Definition at line 273 of file CColouredPointsMap.h.
Referenced by mrpt::obs::CObservation2DRangeScan::resizeScan(), and mrpt::obs::CObservation2DRangeScan::resizeScanAndAssign().
◆ lowestPositive()
| T mrpt::mrpt::utils::lowestPositive | ( | const T | a, |
| const T | b | ||
| ) |
Returns the lowest, possitive among two numbers.
If both are non-positive (<=0), the lowest one is returned.
Definition at line 136 of file CColouredPointsMap.h.
◆ max3()
|
inline |
Definition at line 161 of file CColouredPointsMap.h.
◆ min3()
|
inline |
Definition at line 156 of file CColouredPointsMap.h.
References mrpt::maps::CColouredPointsMap::setPoint().

◆ RAD2DEG() [1/2]
|
inline |
Radians to degrees.
Definition at line 102 of file CColouredPointsMap.h.
Referenced by mrpt::poses::CPose2D::asString(), mrpt::math::TPose2D::asString(), mrpt::poses::CPose3D::asString(), mrpt::math::TTwist2D::asString(), mrpt::math::TTwist3D::asString(), mrpt::graphslam::deciders::CRangeScanOps< GRAPH_T >::TParams::dumpToTextStream(), mrpt::nav::TWaypoint::getAsText(), mrpt::opengl::CFrustum::getHorzFOV(), mrpt::opengl::CFrustum::getHorzFOVLeft(), mrpt::opengl::CFrustum::getHorzFOVRight(), mrpt::opengl::CRenderizable::getPosePitch(), mrpt::opengl::CRenderizable::getPoseRoll(), mrpt::opengl::CRenderizable::getPoseYaw(), mrpt::opengl::CFrustum::getVertFOV(), mrpt::opengl::CFrustum::getVertFOVDown(), mrpt::opengl::CFrustum::getVertFOVUp(), mrpt::nav::CPTG_Holo_Blend::saveToConfigFile(), mrpt::nav::CPTG_DiffDrive_alpha::saveToConfigFile(), mrpt::nav::CPTG_DiffDrive_CollisionGridBased::saveToConfigFile(), mrpt::nav::CParameterizedTrajectoryGenerator::saveToConfigFile(), and mrpt::nav::CWaypointsNavigator::waypoints_navigationStep().

◆ RAD2DEG() [2/2]
|
inline |
Radians to degrees.
Definition at line 104 of file CColouredPointsMap.h.
◆ reverseBytes()
|
inline |
Reverse the order of the bytes of a given type (useful for transforming btw little/big endian)
Definition at line 211 of file CColouredPointsMap.h.
Referenced by TEST().

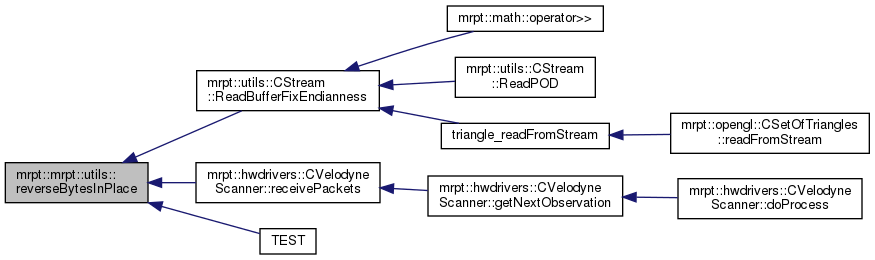
◆ reverseBytesInPlace() [1/11]
| void mrpt::mrpt::utils::reverseBytesInPlace | ( | bool & | v_in_out | ) |
Reverse the order of the bytes of a given type (useful for transforming btw little/big endian)
Referenced by mrpt::utils::CStream::ReadBufferFixEndianness(), mrpt::hwdrivers::CVelodyneScanner::receivePackets(), and TEST().
◆ reverseBytesInPlace() [2/11]
◆ reverseBytesInPlace() [3/11]
◆ reverseBytesInPlace() [4/11]
◆ reverseBytesInPlace() [5/11]
◆ reverseBytesInPlace() [6/11]
◆ reverseBytesInPlace() [7/11]
◆ reverseBytesInPlace() [8/11]
◆ reverseBytesInPlace() [9/11]
◆ reverseBytesInPlace() [10/11]
| void mrpt::mrpt::utils::reverseBytesInPlace | ( | float & | v_in_out | ) |
◆ reverseBytesInPlace() [11/11]
| void mrpt::mrpt::utils::reverseBytesInPlace | ( | double & | v_in_out | ) |
◆ saturate()
|
inline |
Saturate the value of var (the variable gets modified) so it does not get out of [min,max].
Definition at line 234 of file CColouredPointsMap.h.
Referenced by mrpt::maps::CRandomFieldGridMap2D::getAsMatrix(), and mrpt::maps::CRandomFieldGridMap2D::updateMapEstimation_GMRF().

◆ saturate_val()
|
inline |
Like saturate() but it returns the value instead of modifying the variable.
Definition at line 242 of file CColouredPointsMap.h.
Referenced by mrpt::maps::CRandomFieldGridMap2D::getAs3DObject(), and mrpt::maps::CRandomFieldGridMap2D::saveAsMatlab3DGraph().

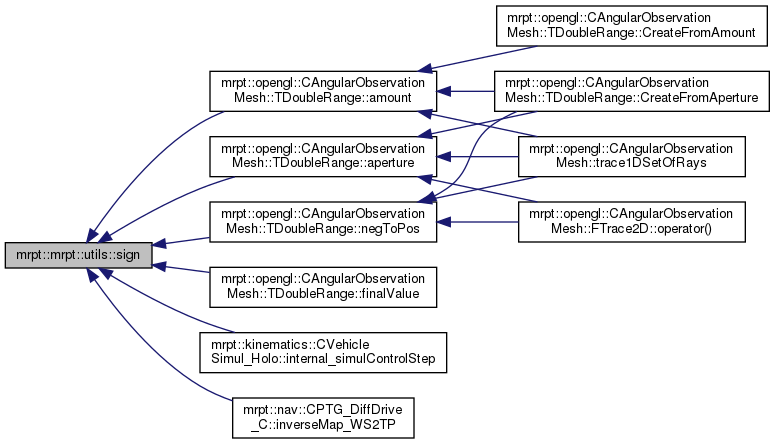
◆ sign()
|
inline |
Returns the sign of X as "1" or "-1".
Definition at line 121 of file CColouredPointsMap.h.
Referenced by mrpt::opengl::CAngularObservationMesh::TDoubleRange::amount(), mrpt::opengl::CAngularObservationMesh::TDoubleRange::aperture(), mrpt::opengl::CAngularObservationMesh::TDoubleRange::finalValue(), mrpt::kinematics::CVehicleSimul_Holo::internal_simulControlStep(), mrpt::nav::CPTG_DiffDrive_C::inverseMap_WS2TP(), and mrpt::opengl::CAngularObservationMesh::TDoubleRange::negToPos().
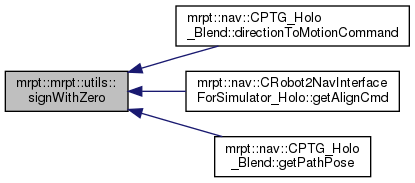
◆ signWithZero()
|
inline |
Returns the sign of X as "0", "1" or "-1".
Definition at line 128 of file CColouredPointsMap.h.
Referenced by mrpt::nav::CPTG_Holo_Blend::directionToMotionCommand(), mrpt::nav::CRobot2NavInterfaceForSimulator_Holo::getAlignCmd(), and mrpt::nav::CPTG_Holo_Blend::getPathPose().
◆ vector_strong_clear()
|
inline |
Like calling a std::vector<>'s clear() method, but really forcing deallocating the memory.
Definition at line 265 of file CColouredPointsMap.h.