Detailed Description
template<class DERIVEDCLASS>
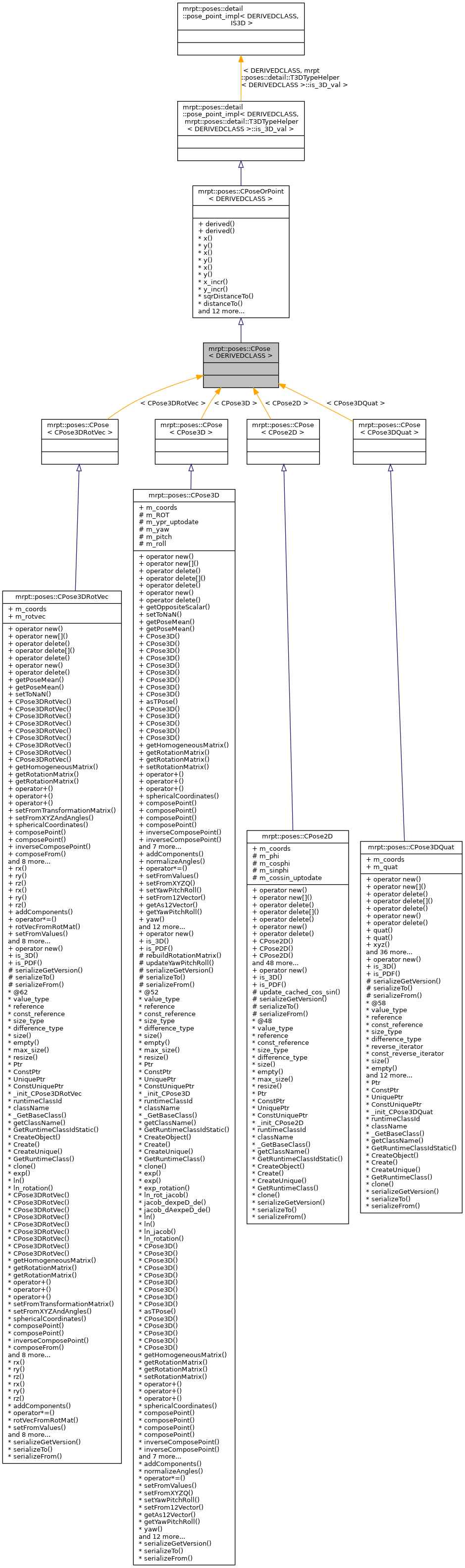
class mrpt::poses::CPose< DERIVEDCLASS >
A base class for representing a pose in 2D or 3D.
For more information refer to the 2D/3D Geometry tutorial online.
- Note
- This class is based on the CRTP design pattern
- See also
- CPoseOrPoint, CPoint
#include <mrpt/poses/CPose.h>
Public Member Functions | |
| const DERIVEDCLASS & | derived () const |
| DERIVEDCLASS & | derived () |
| double | x () const |
| Common members of all points & poses classes. More... | |
| double & | x () |
| void | x (const double v) |
| double | y () const |
| double & | y () |
| void | y (const double v) |
| void | x_incr (const double v) |
| void | y_incr (const double v) |
| template<class OTHERCLASS > | |
| double | sqrDistanceTo (const CPoseOrPoint< OTHERCLASS > &b) const |
| Returns the squared euclidean distance to another pose/point: More... | |
| template<class OTHERCLASS > | |
| double | distanceTo (const CPoseOrPoint< OTHERCLASS > &b) const |
| Returns the Euclidean distance to another pose/point: More... | |
| double | distanceTo (const mrpt::math::TPoint3D &b) const |
| Returns the euclidean distance to a 3D point: More... | |
| double | distance2DToSquare (double ax, double ay) const |
| Returns the squared 2D distance from this pose/point to a 2D point (ignores Z, if it exists). More... | |
| double | distance3DToSquare (double ax, double ay, double az) const |
| Returns the squared 3D distance from this pose/point to a 3D point. More... | |
| double | distance2DTo (double ax, double ay) const |
| Returns the 2D distance from this pose/point to a 2D point (ignores Z, if it exists). More... | |
| double | distance3DTo (double ax, double ay, double az) const |
| Returns the 3D distance from this pose/point to a 3D point. More... | |
| double | norm () const |
Returns the euclidean norm of vector:  . More... . More... | |
| mrpt::math::CVectorDouble | getAsVectorVal () const |
| Return the pose or point as a 1xN vector with all the components (see derived classes for each implementation) More... | |
| template<class MATRIX44 > | |
| MATRIX44 | getHomogeneousMatrixVal () const |
| Returns the corresponding 4x4 homogeneous transformation matrix for the point(translation) or pose (translation+orientation). More... | |
| template<class MATRIX44 > | |
| void | getInverseHomogeneousMatrix (MATRIX44 &out_HM) const |
| Returns the corresponding 4x4 inverse homogeneous transformation matrix for this point or pose. More... | |
| template<class MATRIX44 > | |
| MATRIX44 | getInverseHomogeneousMatrixVal () const |
| This is an overloaded member function, provided for convenience. It differs from the above function only in what argument(s) it accepts. More... | |
| virtual void | setToNaN ()=0 |
| Set all data fields to quiet NaN. More... | |
| static bool | is3DPoseOrPoint () |
| Return true for poses or points with a Z component, false otherwise. More... | |
Member Function Documentation
◆ derived() [1/2]
|
inlineinherited |
Definition at line 135 of file CPoseOrPoint.h.
◆ derived() [2/2]
|
inlineinherited |
Definition at line 131 of file CPoseOrPoint.h.
Referenced by mrpt::poses::CPoseOrPoint< CPoint3D >::distance3DToSquare(), mrpt::poses::CPoseOrPoint< CPoint3D >::getAsVectorVal(), mrpt::poses::CPoseOrPoint< CPoint3D >::getHomogeneousMatrixVal(), mrpt::poses::CPoseOrPoint< CPoint3D >::getInverseHomogeneousMatrix(), mrpt::poses::CPoseOrPoint< CPoint3D >::norm(), mrpt::poses::CPoseOrPoint< CPoint3D >::sqrDistanceTo(), mrpt::poses::CPoseOrPoint< CPoint3D >::x(), mrpt::poses::CPoseOrPoint< CPoint3D >::x_incr(), mrpt::poses::CPoseOrPoint< CPoint3D >::y(), and mrpt::poses::CPoseOrPoint< CPoint3D >::y_incr().
◆ distance2DTo()
|
inlineinherited |
Returns the 2D distance from this pose/point to a 2D point (ignores Z, if it exists).
Definition at line 234 of file CPoseOrPoint.h.
Referenced by mrpt::nav::PlannerRRT_SE2_TPS::solve().
◆ distance2DToSquare()
|
inlineinherited |
Returns the squared 2D distance from this pose/point to a 2D point (ignores Z, if it exists).
Definition at line 218 of file CPoseOrPoint.h.
Referenced by mrpt::poses::CPoseOrPoint< CPoint3D >::distance2DTo().
◆ distance3DTo()
|
inlineinherited |
Returns the 3D distance from this pose/point to a 3D point.
Definition at line 240 of file CPoseOrPoint.h.
Referenced by mrpt::poses::CPoseOrPoint< CPoint3D >::distanceTo(), mrpt::maps::CBeaconMap::internal_computeObservationLikelihood(), and mrpt::maps::CBeaconMap::internal_insertObservation().
◆ distance3DToSquare()
|
inlineinherited |
Returns the squared 3D distance from this pose/point to a 3D point.
Definition at line 225 of file CPoseOrPoint.h.
Referenced by mrpt::poses::CPoseOrPoint< CPoint3D >::distance3DTo().
◆ distanceTo() [1/2]
|
inlineinherited |
Returns the Euclidean distance to another pose/point:
Definition at line 211 of file CPoseOrPoint.h.
Referenced by ICPTests::align2scans(), mrpt::slam::CGridMapAligner::AlignPDF_robustMatch(), mrpt::graphslam::deciders::CFixedIntervalsNRD< GRAPH_T >::checkRegistrationCondition(), mrpt::graphslam::deciders::CIncrementalNodeRegistrationDecider< GRAPH_T >::checkRegistrationConditionPose(), mrpt::maps::CBeacon::generateRingSOG(), mrpt::maps::CBeaconMap::internal_computeObservationLikelihood(), mrpt::maps::CLandmarksMap::internal_computeObservationLikelihood(), mrpt::maps::CBeaconMap::internal_insertObservation(), mrpt::hmtslam::CHMTSLAM::LSLAM_process_message_from_AA(), mrpt::hmtslam::CLSLAM_RBPF_2DLASER::processOneLMH(), ransac_data_assoc_run(), mrpt::slam::CRejectionSamplingRangeOnlyLocalization::RS_observationLikelihood(), mrpt::maps::CBeaconMap::simulateBeaconReadings(), and mrpt::maps::CLandmarksMap::simulateBeaconReadings().
◆ distanceTo() [2/2]
|
inlineinherited |
Returns the euclidean distance to a 3D point:
Definition at line 246 of file CPoseOrPoint.h.
◆ getAsVectorVal()
|
inlineinherited |
Return the pose or point as a 1xN vector with all the components (see derived classes for each implementation)
Definition at line 263 of file CPoseOrPoint.h.
Referenced by mrpt::maps::COccupancyGridMap2D::laserScanSimulatorWithUncertainty(), Pose3DQuatTests::test_compose(), Pose3DTests::test_compose(), Pose3DRotVecTests::test_compose(), Pose3DTests::test_composeFrom(), Pose3DQuatTests::test_composePoint(), Pose3DTests::test_composePoint(), Pose3DRotVecTests::test_conversions(), Pose3DTests::test_ExpLnEqual(), TEST_F(), Pose3DQuatTests::test_fromYPRAndBack(), Pose3DQuatTests::test_invComposePoint(), Pose3DTests::test_inverse(), Pose3DQuatPDFGaussTests::testChangeCoordsRef(), Pose3DPDFGaussTests::testChangeCoordsRef(), Pose3DPDFGaussTests::testPoseComposition(), Pose3DPDFGaussTests::testPoseInverse(), Pose3DPDFGaussTests::testPoseInverseComposition(), and Pose3DPDFGaussTests::testToQuatPDFAndBack().
◆ getHomogeneousMatrixVal()
|
inlineinherited |
Returns the corresponding 4x4 homogeneous transformation matrix for the point(translation) or pose (translation+orientation).
- See also
- getInverseHomogeneousMatrix
Definition at line 275 of file CPoseOrPoint.h.
Referenced by mrpt::obs::CObservation3DRangeScan::getDescriptionAsText(), mrpt::maps::COccupancyGridMap2D::internal_insertObservation(), mrpt::obs::detail::project3DPointsFromDepthImageInto(), Pose3DTests::test_compose(), Pose3DRotVecTests::test_compose(), Pose3DQuatTests::test_copy(), Pose3DQuatTests::test_fromYPRAndBack(), Pose3DTests::test_inverse(), and Pose3DQuatTests::test_unaryInverse().
◆ getInverseHomogeneousMatrix()
|
inlineinherited |
Returns the corresponding 4x4 inverse homogeneous transformation matrix for this point or pose.
- See also
- getHomogeneousMatrix
Definition at line 287 of file CPoseOrPoint.h.
Referenced by mrpt::poses::CPoseOrPoint< CPoint3D >::getInverseHomogeneousMatrixVal(), mrpt::poses::CPose3DRotVec::inverseComposeFrom(), mrpt::vision::CStereoRectifyMap::setFromCamParams(), and Pose3DTests::test_inverse().
◆ getInverseHomogeneousMatrixVal()
|
inlineinherited |
This is an overloaded member function, provided for convenience. It differs from the above function only in what argument(s) it accepts.
Definition at line 295 of file CPoseOrPoint.h.
◆ is3DPoseOrPoint()
|
inlinestaticinherited |
Return true for poses or points with a Z component, false otherwise.
Definition at line 177 of file CPoseOrPoint.h.
Referenced by mrpt::poses::CPoseOrPoint< CPoint3D >::distance3DToSquare(), mrpt::poses::CPoseOrPoint< CPoint3D >::norm(), and mrpt::poses::CPoseOrPoint< CPoint3D >::sqrDistanceTo().
◆ norm()
|
inlineinherited |
Returns the euclidean norm of vector: .
Definition at line 253 of file CPoseOrPoint.h.
Referenced by mrpt::obs::CActionRobotMovement3D::computeFromOdometry_model6DOF(), mrpt::obs::CActionRobotMovement2D::computeFromOdometry_modelGaussian(), mrpt::obs::CActionRobotMovement2D::computeFromOdometry_modelThrun(), mrpt::obs::CActionRobotMovement2D::drawSingleSample_modelThrun(), mrpt::maps::detail::pointmap_traits< CColouredPointsMap >::internal_loadFromRangeScan3D_init(), mrpt::maps::CLandmarksMap::loadSiftFeaturesFromImageObservation(), mrpt::maps::CMultiMetricMapPDF::prediction_and_update_pfOptimalProposal(), mrpt::hmtslam::CLSLAM_RBPF_2DLASER::prediction_and_update_pfOptimalProposal(), mrpt::slam::CMetricMapBuilderRBPF::processActionObservation(), and mrpt::slam::CMetricMapBuilderICP::TDist::updateDistances().
◆ setToNaN()
|
pure virtualinherited |
Set all data fields to quiet NaN.
Implemented in mrpt::poses::CPose3D, mrpt::poses::CPose3DQuat, mrpt::poses::CPose3DRotVec, mrpt::poses::CPose2D, mrpt::poses::CPoint3D, and mrpt::poses::CPoint2D.
◆ sqrDistanceTo()
|
inlineinherited |
Returns the squared euclidean distance to another pose/point:
Definition at line 184 of file CPoseOrPoint.h.
Referenced by mrpt::poses::CPoseOrPoint< CPoint3D >::distanceTo().
◆ x() [1/3]
|
inlineinherited |
Definition at line 149 of file CPoseOrPoint.h.
◆ x() [2/3]
|
inlineinherited |
Common members of all points & poses classes.
< Get X coord.
Definition at line 140 of file CPoseOrPoint.h.
Referenced by mrpt::nav::CPTG_RobotShape_Circular::add_robotShape_to_setOfLines(), mrpt::slam::CGridMapAligner::AlignPDF_robustMatch(), mrpt::graphs::detail::graph_ops< graph_t >::auxEuclid2Dist(), mrpt::poses::CPoint2DPDFGaussian::bayesianFusion(), mrpt::poses::CPointPDFGaussian::bayesianFusion(), mrpt::poses::CPosePDFGaussian::bayesianFusion(), mrpt::poses::CPosePDFGaussianInf::bayesianFusion(), mrpt::poses::CPointPDFSOG::bayesianFusion(), mrpt::maps::CColouredPointsMap::colourFromObservation(), mrpt::obs::CActionRobotMovement3D::computeFromOdometry_model6DOF(), mrpt::obs::CActionRobotMovement2D::computeFromOdometry_modelThrun(), mrpt::maps::COccupancyGridMap2D::computeLikelihoodField_Thrun(), mrpt::maps::CBeaconMap::computeMatchingWith3DLandmarks(), mrpt::maps::CLandmarksMap::computeMatchingWith3DLandmarks(), mrpt::vision::computeMsd(), mrpt::maps::COccupancyGridMap2D::computeObservationLikelihood_CellsDifference(), mrpt::poses::CPosePDFParticles::copyFrom(), mrpt::poses::CPose3DQuatPDFGaussian::copyFrom(), mrpt::poses::CPose3DPDFGaussian::copyFrom(), mrpt::poses::CPoint3D::CPoint3D(), mrpt::poses::CPose2D::CPose2D(), mrpt::poses::CPose3DRotVec::CPose3DRotVec(), mrpt::hwdrivers::CIbeoLuxETH::dataCollection(), mrpt::maps::CPointsMap::determineMatching2D(), mrpt::nav::PoseDistanceMetric< TNodeSE2_TP >::distance(), mrpt::poses::CPoseOrPoint< CPoint3D >::distance2DToSquare(), mrpt::poses::CPoseOrPoint< CPoint3D >::distance3DToSquare(), mrpt::poses::CPoseRandomSampler::do_sample_2D(), mrpt::poses::CPoseRandomSampler::do_sample_3D(), mrpt::graphs::detail::CVisualizer< CPOSE, MAPS_IMPLEMENTATION, mrpt::graphs::detail::TMRSlamNodeAnnotations, mrpt::graphs::detail::edge_annotations_empty >::drawEdgeRelPoses(), mrpt::graphs::detail::CVisualizer< CPOSE, MAPS_IMPLEMENTATION, mrpt::graphs::detail::TMRSlamNodeAnnotations, mrpt::graphs::detail::edge_annotations_empty >::drawEdges(), mrpt::graphs::detail::CMRVisualizer< CPOSE, MAPS_IMPLEMENTATION, TMRSlamNodeAnnotations, EDGE_ANNOTATIONS >::drawEdges(), mrpt::poses::CPose3DPDFGaussianInf::drawManySamples(), mrpt::poses::CPosePDFGaussian::drawManySamples(), mrpt::poses::CPose3DPDFGaussian::drawManySamples(), mrpt::poses::CPosePDFGaussianInf::drawManySamples(), mrpt::poses::CPoint2DPDFGaussian::drawSingleSample(), mrpt::poses::CPose3DPDFGaussianInf::drawSingleSample(), mrpt::poses::CPosePDFGaussian::drawSingleSample(), mrpt::poses::CPointPDFGaussian::drawSingleSample(), mrpt::poses::CPose3DPDFGaussian::drawSingleSample(), mrpt::poses::CPosePDFGaussianInf::drawSingleSample(), mrpt::poses::CPointPDFSOG::drawSingleSample(), mrpt::obs::CActionRobotMovement2D::drawSingleSample_modelThrun(), mrpt::hmtslam::CHierarchicalMapMHPartition::dumpAsText(), mrpt::poses::SE_traits< 2 >::exp(), mrpt::poses::CPose3D::exp(), mrpt::obs::CActionRobotMovement2D::fastDrawSingleSample_modelGaussian(), mrpt::vision::frameJac(), Pose3DQuatTests::func_inv_compose_point(), Pose3DTests::func_inv_compose_point(), func_laserSimul_callback(), mrpt::maps::CBeacon::generateObservationModelDistribution(), mrpt::maps::CBeacon::generateRingSOG(), mrpt::slam::CRangeBearingKFSLAM2D::getAs3DObject(), mrpt::maps::CBeacon::getAs3DObject(), mrpt::slam::CRangeBearingKFSLAM::getAs3DObject(), mrpt::hmtslam::CLocalMetricHypothesis::getAs3DScene(), mrpt::slam::CIncrementalMapPartitioner::getAs3DScene(), mrpt::hmtslam::CHierarchicalMapMHPartition::getAs3DScene(), mrpt::maps::CBeacon::getAsMatlabDrawCommands(), mrpt::poses::CPoint< CPoint3D >::getHomogeneousMatrix(), mrpt::poses::CRobot2DPoseEstimator::getLatestRobotPose(), mrpt::hwdrivers::CImageGrabber_FlyCapture2::getObservation(), mrpt::maps::CLandmark::getPose(), mrpt::opengl::CRenderizable::getPoseX(), mrpt::slam::CICP::ICP3D_Method_Classic(), mrpt::slam::CICP::ICP_Method_Classic(), mrpt::slam::CICP::ICP_Method_LM(), mrpt::maps::COctoMapBase< octomap::OcTree, octomap::OcTreeNode >::internal_build_PointCloud_for_observation(), mrpt::maps::CBeaconMap::internal_computeObservationLikelihood(), mrpt::maps::CReflectivityGridMap2D::internal_computeObservationLikelihood(), mrpt::maps::CLandmarksMap::internal_computeObservationLikelihood(), mrpt::maps::CBeaconMap::internal_insertObservation(), mrpt::maps::CWirelessPowerGridMap2D::internal_insertObservation(), mrpt::maps::CReflectivityGridMap2D::internal_insertObservation(), mrpt::maps::CGasConcentrationGridMap2D::internal_insertObservation(), mrpt::maps::CColouredOctoMap::internal_insertObservation(), mrpt::maps::COccupancyGridMap2D::internal_insertObservation(), mrpt::poses::CPose3DQuatPDFGaussianInf::inverse(), mrpt::poses::CPose3DQuatPDFGaussian::inverse(), mrpt::poses::CPosePDFGaussian::inverse(), mrpt::poses::CPosePDFGaussianInf::inverse(), mrpt::poses::CPosePDFGaussian::inverseComposition(), jacob_dA_eps_D_p_deps(), mrpt::poses::CPose3DQuatPDF::jacobiansPoseComposition(), mrpt::poses::CPosePDF::jacobiansPoseComposition(), mrpt::maps::COccupancyGridMap2D::laserScanSimulator(), mrpt::poses::SE_traits< 2 >::ln(), mrpt::maps::CLandmarksMap::loadSiftFeaturesFromStereoImageObservation(), mrpt::hmtslam::CLSLAM_RBPF_2DLASER::loadTPathBinFromPath(), mrpt::hmtslam::CHMTSLAM::LSLAM_process_message_from_AA(), mrpt::poses::CPoint2DPDFGaussian::mahalanobisDistanceTo(), mrpt::poses::CPointPDFGaussian::mahalanobisDistanceTo(), mrpt::poses::CPoint2DPDFGaussian::mahalanobisDistanceToPoint(), mrpt::poses::CPosePDFSOG::mergeModes(), mrpt::poses::CPoseOrPoint< CPoint3D >::norm(), mrpt::slam::CRangeBearingKFSLAM2D::OnGetAction(), mrpt::slam::CRangeBearingKFSLAM2D::OnInverseObservationModel(), mrpt::slam::CRangeBearingKFSLAM2D::OnObservationJacobians(), mrpt::slam::CRangeBearingKFSLAM2D::OnObservationModel(), mrpt::slam::CRangeBearingKFSLAM2D::OnTransitionModel(), mrpt::poses::operator!=(), mrpt::poses::CPose2D::operator+(), mrpt::poses::operator+(), mrpt::poses::operator==(), mrpt::topography::path_from_rtk_gps(), mrpt::maps::CMultiMetricMapPDF::prediction_and_update_pfOptimalProposal(), mrpt::hwdrivers::CSkeletonTracker::processPreviewNone(), mrpt::poses::CPoint2DPDFGaussian::productIntegralWith(), mrpt::poses::CPointPDFGaussian::productIntegralWith(), mrpt::poses::CPointPDFGaussian::productIntegralWith2D(), ransac_data_assoc_run(), mrpt::opengl::CRenderizable::readFromStreamRender(), mrpt::opengl::COpenGLViewport::render(), mrpt::opengl::CPlanarLaserScan::render_dl(), mrpt::slam::CRejectionSamplingRangeOnlyLocalization::RS_drawFromProposal(), mrpt::slam::CRangeBearingKFSLAM2D::saveMapAndPath2DRepresentationAsMATLABFile(), mrpt::poses::CPoint2DPDFGaussian::saveToTextFile(), mrpt::poses::CPointPDFGaussian::saveToTextFile(), mrpt::poses::CPosePDFGaussian::saveToTextFile(), mrpt::poses::CPose3DQuatPDFGaussianInf::saveToTextFile(), mrpt::poses::CPose3DQuatPDFGaussian::saveToTextFile(), mrpt::poses::CPosePDFGaussianInf::saveToTextFile(), mrpt::poses::CPose3DPDFGaussianInf::saveToTextFile(), mrpt::poses::CPose3DPDFGaussian::saveToTextFile(), mrpt::tfest::se3_l2_robust(), mrpt::poses::CPosePDFGaussianInf::serializeTo(), mrpt::opengl::CRenderizable::setLocation(), mrpt::maps::CLandmark::setPose(), mrpt::opengl::CRenderizable::setPose(), mrpt::nav::PlannerRRT_SE2_TPS::solve(), mrpt::maps::COccupancyGridMap2D::sonarSimulator(), mrpt::poses::CPoseOrPoint< CPoint3D >::sqrDistanceTo(), mrpt::vision::StereoObs2BRObs(), TEST(), Pose3DTests::test_composePoint(), Pose3DTests::test_to_from_2d(), mrpt::opengl::CDisk::traceRay(), mrpt::opengl::CSphere::traceRay(), mrpt::nav::PlannerTPS_VirtualBase::transformPointcloudWithSquareClipping(), mrpt::graphs::detail::graph_ops< graph_t >::write_EDGE_line(), and mrpt::opengl::CRenderizable::writeToStreamRender().
◆ x() [3/3]
|
inlineinherited |
- Parameters
-
v Set X coord.
Definition at line 158 of file CPoseOrPoint.h.
◆ x_incr()
|
inlineinherited |
- Parameters
-
v X+=v
Definition at line 167 of file CPoseOrPoint.h.
Referenced by mrpt::slam::CICP::ICP_Method_Classic(), mrpt::maps::CBeaconMap::internal_insertObservation(), and TEST().
◆ y() [1/3]
|
inlineinherited |
Definition at line 153 of file CPoseOrPoint.h.
◆ y() [2/3]
|
inlineinherited |
< Get Y coord.
Definition at line 144 of file CPoseOrPoint.h.
Referenced by mrpt::nav::CPTG_RobotShape_Circular::add_robotShape_to_setOfLines(), mrpt::slam::CGridMapAligner::AlignPDF_robustMatch(), mrpt::poses::CPoint< CPoint3D >::asString(), mrpt::graphs::detail::graph_ops< graph_t >::auxEuclid2Dist(), mrpt::poses::CPoint2DPDFGaussian::bayesianFusion(), mrpt::poses::CPointPDFGaussian::bayesianFusion(), mrpt::poses::CPosePDFGaussian::bayesianFusion(), mrpt::poses::CPosePDFGaussianInf::bayesianFusion(), mrpt::poses::CPointPDFSOG::bayesianFusion(), mrpt::maps::CColouredPointsMap::colourFromObservation(), mrpt::obs::CActionRobotMovement3D::computeFromOdometry_model6DOF(), mrpt::obs::CActionRobotMovement2D::computeFromOdometry_modelThrun(), mrpt::maps::COccupancyGridMap2D::computeLikelihoodField_Thrun(), mrpt::maps::CBeaconMap::computeMatchingWith3DLandmarks(), mrpt::maps::CLandmarksMap::computeMatchingWith3DLandmarks(), mrpt::vision::computeMsd(), mrpt::maps::COccupancyGridMap2D::computeObservationLikelihood_CellsDifference(), mrpt::poses::CPosePDFParticles::copyFrom(), mrpt::poses::CPose3DQuatPDFGaussian::copyFrom(), mrpt::poses::CPose3DPDFGaussian::copyFrom(), mrpt::poses::CPose2D::CPose2D(), mrpt::poses::CPose3DRotVec::CPose3DRotVec(), mrpt::hwdrivers::CIbeoLuxETH::dataCollection(), mrpt::maps::CPointsMap::determineMatching2D(), mrpt::nav::PoseDistanceMetric< TNodeSE2_TP >::distance(), mrpt::poses::CPoseOrPoint< CPoint3D >::distance2DToSquare(), mrpt::poses::CPoseOrPoint< CPoint3D >::distance3DToSquare(), mrpt::poses::CPoseRandomSampler::do_sample_2D(), mrpt::poses::CPoseRandomSampler::do_sample_3D(), mrpt::graphs::detail::CVisualizer< CPOSE, MAPS_IMPLEMENTATION, mrpt::graphs::detail::TMRSlamNodeAnnotations, mrpt::graphs::detail::edge_annotations_empty >::drawEdgeRelPoses(), mrpt::graphs::detail::CVisualizer< CPOSE, MAPS_IMPLEMENTATION, mrpt::graphs::detail::TMRSlamNodeAnnotations, mrpt::graphs::detail::edge_annotations_empty >::drawEdges(), mrpt::graphs::detail::CMRVisualizer< CPOSE, MAPS_IMPLEMENTATION, TMRSlamNodeAnnotations, EDGE_ANNOTATIONS >::drawEdges(), mrpt::poses::CPose3DPDFGaussianInf::drawManySamples(), mrpt::poses::CPosePDFGaussian::drawManySamples(), mrpt::poses::CPose3DPDFGaussian::drawManySamples(), mrpt::poses::CPosePDFGaussianInf::drawManySamples(), mrpt::poses::CPoint2DPDFGaussian::drawSingleSample(), mrpt::poses::CPose3DPDFGaussianInf::drawSingleSample(), mrpt::poses::CPosePDFGaussian::drawSingleSample(), mrpt::poses::CPointPDFGaussian::drawSingleSample(), mrpt::poses::CPose3DPDFGaussian::drawSingleSample(), mrpt::poses::CPosePDFGaussianInf::drawSingleSample(), mrpt::poses::CPointPDFSOG::drawSingleSample(), mrpt::obs::CActionRobotMovement2D::drawSingleSample_modelThrun(), mrpt::hmtslam::CHierarchicalMapMHPartition::dumpAsText(), mrpt::poses::SE_traits< 2 >::exp(), mrpt::poses::CPose3D::exp(), mrpt::obs::CActionRobotMovement2D::fastDrawSingleSample_modelGaussian(), mrpt::vision::frameJac(), Pose3DQuatTests::func_inv_compose_point(), Pose3DTests::func_inv_compose_point(), func_laserSimul_callback(), mrpt::maps::CBeacon::generateObservationModelDistribution(), mrpt::maps::CBeacon::generateRingSOG(), mrpt::slam::CRangeBearingKFSLAM2D::getAs3DObject(), mrpt::maps::CBeacon::getAs3DObject(), mrpt::slam::CRangeBearingKFSLAM::getAs3DObject(), mrpt::hmtslam::CLocalMetricHypothesis::getAs3DScene(), mrpt::slam::CIncrementalMapPartitioner::getAs3DScene(), mrpt::hmtslam::CHierarchicalMapMHPartition::getAs3DScene(), mrpt::maps::CBeacon::getAsMatlabDrawCommands(), mrpt::poses::CPoint< CPoint3D >::getHomogeneousMatrix(), mrpt::poses::CRobot2DPoseEstimator::getLatestRobotPose(), mrpt::hwdrivers::CImageGrabber_FlyCapture2::getObservation(), mrpt::maps::CLandmark::getPose(), mrpt::opengl::CRenderizable::getPoseY(), mrpt::slam::CICP::ICP3D_Method_Classic(), mrpt::slam::CICP::ICP_Method_Classic(), mrpt::slam::CICP::ICP_Method_LM(), mrpt::maps::COctoMapBase< octomap::OcTree, octomap::OcTreeNode >::internal_build_PointCloud_for_observation(), mrpt::maps::CBeaconMap::internal_computeObservationLikelihood(), mrpt::maps::CReflectivityGridMap2D::internal_computeObservationLikelihood(), mrpt::maps::CLandmarksMap::internal_computeObservationLikelihood(), mrpt::maps::CBeaconMap::internal_insertObservation(), mrpt::maps::CWirelessPowerGridMap2D::internal_insertObservation(), mrpt::maps::CReflectivityGridMap2D::internal_insertObservation(), mrpt::maps::CGasConcentrationGridMap2D::internal_insertObservation(), mrpt::maps::CColouredOctoMap::internal_insertObservation(), mrpt::maps::COccupancyGridMap2D::internal_insertObservation(), mrpt::poses::CPose3DQuatPDFGaussianInf::inverse(), mrpt::poses::CPose3DQuatPDFGaussian::inverse(), mrpt::poses::CPosePDFGaussian::inverse(), mrpt::poses::CPosePDFGaussianInf::inverse(), mrpt::poses::CPosePDFGaussian::inverseComposition(), jacob_dA_eps_D_p_deps(), mrpt::poses::CPose3DQuatPDF::jacobiansPoseComposition(), mrpt::poses::CPosePDF::jacobiansPoseComposition(), mrpt::maps::COccupancyGridMap2D::laserScanSimulator(), mrpt::poses::SE_traits< 2 >::ln(), mrpt::hmtslam::CLSLAM_RBPF_2DLASER::loadTPathBinFromPath(), mrpt::hmtslam::CHMTSLAM::LSLAM_process_message_from_AA(), mrpt::poses::CPoint2DPDFGaussian::mahalanobisDistanceTo(), mrpt::poses::CPointPDFGaussian::mahalanobisDistanceTo(), mrpt::poses::CPoint2DPDFGaussian::mahalanobisDistanceToPoint(), mrpt::poses::CPosePDFSOG::mergeModes(), mrpt::poses::CPoseOrPoint< CPoint3D >::norm(), mrpt::slam::CRangeBearingKFSLAM2D::OnGetAction(), mrpt::slam::CRangeBearingKFSLAM2D::OnInverseObservationModel(), mrpt::slam::CRangeBearingKFSLAM2D::OnObservationJacobians(), mrpt::slam::CRangeBearingKFSLAM2D::OnObservationModel(), mrpt::slam::CRangeBearingKFSLAM2D::OnTransitionModel(), mrpt::poses::operator!=(), mrpt::poses::CPose2D::operator+(), mrpt::poses::operator+(), mrpt::poses::operator==(), mrpt::topography::path_from_rtk_gps(), mrpt::maps::CMultiMetricMapPDF::prediction_and_update_pfOptimalProposal(), mrpt::hwdrivers::CSkeletonTracker::processPreviewNone(), mrpt::poses::CPoint2DPDFGaussian::productIntegralWith(), mrpt::poses::CPointPDFGaussian::productIntegralWith(), mrpt::poses::CPointPDFGaussian::productIntegralWith2D(), ransac_data_assoc_run(), mrpt::opengl::CRenderizable::readFromStreamRender(), mrpt::opengl::COpenGLViewport::render(), mrpt::opengl::CPlanarLaserScan::render_dl(), mrpt::slam::CRejectionSamplingRangeOnlyLocalization::RS_drawFromProposal(), mrpt::slam::CRangeBearingKFSLAM2D::saveMapAndPath2DRepresentationAsMATLABFile(), mrpt::poses::CPoint2DPDFGaussian::saveToTextFile(), mrpt::poses::CPointPDFGaussian::saveToTextFile(), mrpt::poses::CPosePDFGaussian::saveToTextFile(), mrpt::poses::CPose3DQuatPDFGaussianInf::saveToTextFile(), mrpt::poses::CPose3DQuatPDFGaussian::saveToTextFile(), mrpt::poses::CPosePDFGaussianInf::saveToTextFile(), mrpt::poses::CPose3DPDFGaussianInf::saveToTextFile(), mrpt::poses::CPose3DPDFGaussian::saveToTextFile(), mrpt::tfest::se3_l2_robust(), mrpt::poses::CPosePDFGaussianInf::serializeTo(), mrpt::opengl::CRenderizable::setLocation(), mrpt::maps::CLandmark::setPose(), mrpt::opengl::CRenderizable::setPose(), mrpt::nav::PlannerRRT_SE2_TPS::solve(), mrpt::maps::COccupancyGridMap2D::sonarSimulator(), mrpt::poses::CPoseOrPoint< CPoint3D >::sqrDistanceTo(), Pose3DTests::test_composePoint(), Pose3DTests::test_to_from_2d(), mrpt::opengl::CDisk::traceRay(), mrpt::opengl::CSphere::traceRay(), mrpt::nav::PlannerTPS_VirtualBase::transformPointcloudWithSquareClipping(), mrpt::graphs::detail::graph_ops< graph_t >::write_EDGE_line(), and mrpt::opengl::CRenderizable::writeToStreamRender().
◆ y() [3/3]
|
inlineinherited |
- Parameters
-
v Set Y coord.
Definition at line 162 of file CPoseOrPoint.h.
◆ y_incr()
|
inlineinherited |
- Parameters
-
v Y+=v
Definition at line 171 of file CPoseOrPoint.h.
Referenced by mrpt::slam::CICP::ICP_Method_Classic(), and mrpt::maps::CBeaconMap::internal_insertObservation().