Detailed Description
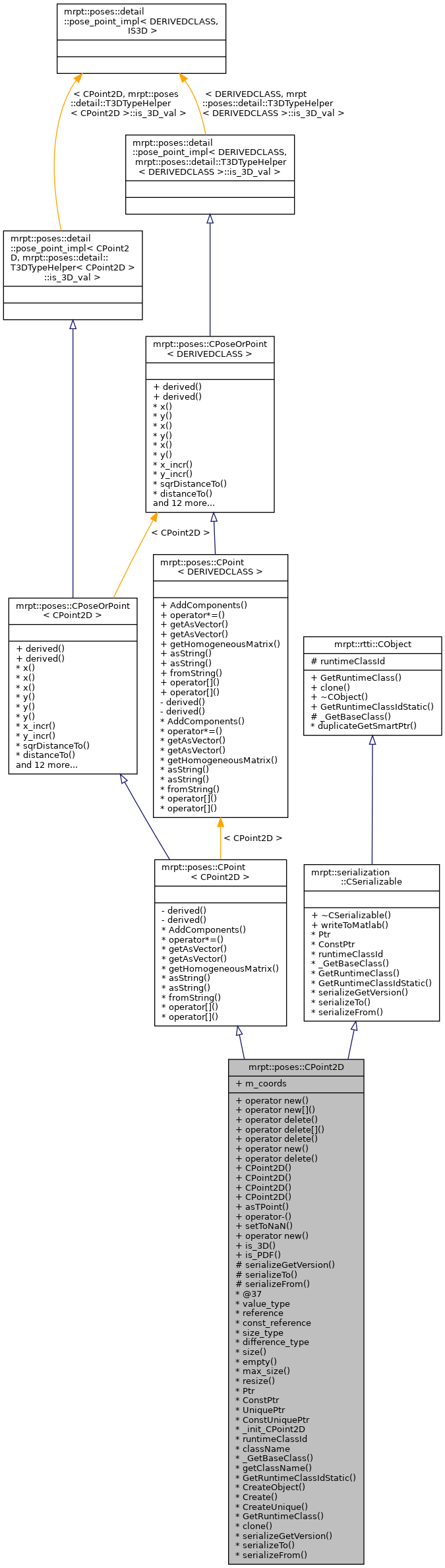
A class used to store a 2D point.
For a complete description of Points/Poses, see mrpt::poses::CPoseOrPoint, or refer to the 2D/3D Geometry tutorial in the wiki.
- See also
- CPoseOrPoint,CPose, CPoint
Definition at line 35 of file CPoint2D.h.
#include <mrpt/poses/CPoint2D.h>
Public Types | |
| enum | { is_3D_val = 0 } |
| enum | { is_PDF_val = 0 } |
Public Member Functions | |
| void * | operator new (size_t size) |
| void * | operator new[] (size_t size) |
| void | operator delete (void *ptr) noexcept |
| void | operator delete[] (void *ptr) noexcept |
| void | operator delete (void *memory, void *ptr) noexcept |
| void * | operator new (size_t size, const std::nothrow_t &) noexcept |
| void | operator delete (void *ptr, const std::nothrow_t &) noexcept |
| CPoint2D (double x=0, double y=0) | |
| Constructor for initializing point coordinates. More... | |
| template<class OTHERCLASS > | |
| CPoint2D (const CPoseOrPoint< OTHERCLASS > &b) | |
| Constructor from x/y coordinates given from other pose. More... | |
| CPoint2D (const mrpt::math::TPoint2D &o) | |
| Implicit constructor from lightweight type. More... | |
| CPoint2D (const mrpt::math::TPoint3D &o) | |
| Explicit constructor from lightweight type (loses the z coord). More... | |
| mrpt::math::TPoint2D | asTPoint () const |
| CPoint2D | operator- (const CPose2D &b) const |
| The operator D="this"-b is the pose inverse compounding operator, the resulting points "D" fulfils: "this" = b + D, so that: b == a + (b-a) More... | |
| void | setToNaN () override |
| Set all data fields to quiet NaN. More... | |
| virtual mxArray * | writeToMatlab () const |
Introduces a pure virtual method responsible for writing to a mxArray Matlab object, typically a MATLAB struct whose contents are documented in each derived class. More... | |
Methods common to all 2D or 3D points | |
| void | AddComponents (const OTHERCLASS &b) |
| Scalar addition of all coordinates. More... | |
| void | operator*= (const double s) |
| Scalar multiplication. More... | |
| void | getAsVector (mrpt::math::CVectorDouble &v) const |
| Return the pose or point as a 1x2 or 1x3 vector [x y] or [x y z]. More... | |
| mrpt::math::CVectorDouble | getAsVector () const |
| This is an overloaded member function, provided for convenience. It differs from the above function only in what argument(s) it accepts. More... | |
| void | getHomogeneousMatrix (MATRIX44 &out_HM) const |
| Returns the corresponding 4x4 homogeneous transformation matrix for the point(translation) or pose (translation+orientation). More... | |
| void | asString (std::string &s) const |
| Returns a human-readable textual representation of the object (eg: "[0.02 1.04]" ) More... | |
| std::string | asString () const |
| void | fromString (const std::string &s) |
| Set the current object value from a string generated by 'asString' (eg: "[0.02 1.04]" ) More... | |
| const double & | operator[] (unsigned int i) const |
| double & | operator[] (unsigned int i) |
Methods common to all 2D or 3D points | |
| void | AddComponents (const OTHERCLASS &b) |
| Scalar addition of all coordinates. More... | |
| void | operator*= (const double s) |
| Scalar multiplication. More... | |
| void | getAsVector (mrpt::math::CVectorDouble &v) const |
| Return the pose or point as a 1x2 or 1x3 vector [x y] or [x y z]. More... | |
| mrpt::math::CVectorDouble | getAsVector () const |
| This is an overloaded member function, provided for convenience. It differs from the above function only in what argument(s) it accepts. More... | |
| void | getHomogeneousMatrix (MATRIX44 &out_HM) const |
| Returns the corresponding 4x4 homogeneous transformation matrix for the point(translation) or pose (translation+orientation). More... | |
| void | asString (std::string &s) const |
| Returns a human-readable textual representation of the object (eg: "[0.02 1.04]" ) More... | |
| std::string | asString () const |
| void | fromString (const std::string &s) |
| Set the current object value from a string generated by 'asString' (eg: "[0.02 1.04]" ) More... | |
| const double & | operator[] (unsigned int i) const |
| double & | operator[] (unsigned int i) |
Static Public Member Functions | |
| static void * | operator new (size_t size, void *ptr) |
| static bool | is_3D () |
| static bool | is_PDF () |
Public Attributes | |
| mrpt::math::CArrayDouble< 2 > | m_coords |
| [x,y] More... | |
Protected Member Functions | |
CSerializable virtual methods | |
| uint8_t | serializeGetVersion () const override |
| Must return the current versioning number of the object. More... | |
| void | serializeTo (mrpt::serialization::CArchive &out) const override |
| Pure virtual method for writing (serializing) to an abstract archive. More... | |
| void | serializeFrom (mrpt::serialization::CArchive &in, uint8_t serial_version) override |
| Pure virtual method for reading (deserializing) from an abstract archive. More... | |
Private Member Functions | |
| CPoint2D & | derived () |
| const CPoint2D & | derived () const |
RTTI stuff | |
| using | Ptr = std::shared_ptr< CPoint2D > |
| using | ConstPtr = std::shared_ptr< const CPoint2D > |
| using | UniquePtr = std::unique_ptr< CPoint2D > |
| using | ConstUniquePtr = std::unique_ptr< const CPoint2D > |
| static mrpt::rtti::CLASSINIT | _init_CPoint2D |
| static const mrpt::rtti::TRuntimeClassId | runtimeClassId |
| static constexpr const char * | className = "CPoint2D" |
| static const mrpt::rtti::TRuntimeClassId * | _GetBaseClass () |
| static constexpr auto | getClassName () |
| static const mrpt::rtti::TRuntimeClassId & | GetRuntimeClassIdStatic () |
| static mrpt::rtti::CObject * | CreateObject () |
| template<typename... Args> | |
| static Ptr | Create (Args &&... args) |
| template<typename... Args> | |
| static UniquePtr | CreateUnique (Args &&... args) |
| virtual const mrpt::rtti::TRuntimeClassId * | GetRuntimeClass () const override |
| Returns information about the class of an object in runtime. More... | |
| virtual mrpt::rtti::CObject * | clone () const override |
| Returns a deep copy (clone) of the object, indepently of its class. More... | |
STL-like methods and typedefs | |
| enum | { static_size = 2 } |
| using | value_type = double |
| The type of the elements. More... | |
| using | reference = double & |
| using | const_reference = const double & |
| using | size_type = std::size_t |
| using | difference_type = std::ptrdiff_t |
| static size_type | size () |
| static bool | empty () |
| static size_type | max_size () |
| static void | resize (const size_t n) |
| static bool | is3DPoseOrPoint () |
| Return true for poses or points with a Z component, false otherwise. More... | |
| double | x () const |
| Common members of all points & poses classes. More... | |
| double & | x () |
| void | x (const double v) |
| double | y () const |
| double & | y () |
| void | y (const double v) |
| void | x_incr (const double v) |
| void | y_incr (const double v) |
| double | sqrDistanceTo (const CPoseOrPoint< OTHERCLASS > &b) const |
| Returns the squared euclidean distance to another pose/point: More... | |
| double | distanceTo (const CPoseOrPoint< OTHERCLASS > &b) const |
| Returns the Euclidean distance to another pose/point: More... | |
| double | distanceTo (const mrpt::math::TPoint3D &b) const |
| Returns the euclidean distance to a 3D point: More... | |
| double | distance2DToSquare (double ax, double ay) const |
| Returns the squared 2D distance from this pose/point to a 2D point (ignores Z, if it exists). More... | |
| double | distance3DToSquare (double ax, double ay, double az) const |
| Returns the squared 3D distance from this pose/point to a 3D point. More... | |
| double | distance2DTo (double ax, double ay) const |
| Returns the 2D distance from this pose/point to a 2D point (ignores Z, if it exists). More... | |
| double | distance3DTo (double ax, double ay, double az) const |
| Returns the 3D distance from this pose/point to a 3D point. More... | |
| double | norm () const |
Returns the euclidean norm of vector:  . More... . More... | |
| mrpt::math::CVectorDouble | getAsVectorVal () const |
| Return the pose or point as a 1xN vector with all the components (see derived classes for each implementation) More... | |
| MATRIX44 | getHomogeneousMatrixVal () const |
| Returns the corresponding 4x4 homogeneous transformation matrix for the point(translation) or pose (translation+orientation). More... | |
| void | getInverseHomogeneousMatrix (MATRIX44 &out_HM) const |
| Returns the corresponding 4x4 inverse homogeneous transformation matrix for this point or pose. More... | |
| MATRIX44 | getInverseHomogeneousMatrixVal () const |
| This is an overloaded member function, provided for convenience. It differs from the above function only in what argument(s) it accepts. More... | |
Member Typedef Documentation
◆ const_reference
| using mrpt::poses::CPoint2D::const_reference = const double& |
Definition at line 98 of file CPoint2D.h.
◆ ConstPtr
| using mrpt::poses::CPoint2D::ConstPtr = std::shared_ptr<const CPoint2D > |
Definition at line 38 of file CPoint2D.h.
◆ ConstUniquePtr
| using mrpt::poses::CPoint2D::ConstUniquePtr = std::unique_ptr<const CPoint2D > |
Definition at line 38 of file CPoint2D.h.
◆ difference_type
Definition at line 100 of file CPoint2D.h.
◆ Ptr
| using mrpt::poses::CPoint2D::Ptr = std::shared_ptr< CPoint2D > |
A type for the associated smart pointer
Definition at line 38 of file CPoint2D.h.
◆ reference
| using mrpt::poses::CPoint2D::reference = double& |
Definition at line 97 of file CPoint2D.h.
◆ size_type
| using mrpt::poses::CPoint2D::size_type = std::size_t |
Definition at line 99 of file CPoint2D.h.
◆ UniquePtr
| using mrpt::poses::CPoint2D::UniquePtr = std::unique_ptr< CPoint2D > |
Definition at line 38 of file CPoint2D.h.
◆ value_type
| using mrpt::poses::CPoint2D::value_type = double |
The type of the elements.
Definition at line 96 of file CPoint2D.h.
Member Enumeration Documentation
◆ anonymous enum
| anonymous enum |
| Enumerator | |
|---|---|
| is_3D_val | |
Definition at line 83 of file CPoint2D.h.
◆ anonymous enum
| anonymous enum |
| Enumerator | |
|---|---|
| is_PDF_val | |
Definition at line 88 of file CPoint2D.h.
◆ anonymous enum
| anonymous enum |
| Enumerator | |
|---|---|
| static_size | |
Definition at line 103 of file CPoint2D.h.
Constructor & Destructor Documentation
◆ CPoint2D() [1/4]
|
inline |
Constructor for initializing point coordinates.
Definition at line 46 of file CPoint2D.h.
References m_coords, mrpt::poses::CPoseOrPoint< CPoint2D >::x(), and mrpt::poses::CPoseOrPoint< CPoint2D >::y().
◆ CPoint2D() [2/4]
|
inlineexplicit |
Constructor from x/y coordinates given from other pose.
Definition at line 54 of file CPoint2D.h.
References m_coords.
◆ CPoint2D() [3/4]
|
inlineexplicit |
Implicit constructor from lightweight type.
Definition at line 61 of file CPoint2D.h.
References m_coords, mrpt::math::TPoint2D::x, and mrpt::math::TPoint2D::y.
◆ CPoint2D() [4/4]
|
inlineexplicit |
Explicit constructor from lightweight type (loses the z coord).
Definition at line 68 of file CPoint2D.h.
References m_coords, mrpt::math::TPoint3D::x, and mrpt::math::TPoint3D::y.
Member Function Documentation
◆ _GetBaseClass()
|
staticprotected |
◆ AddComponents()
|
inlineinherited |
◆ asString() [1/2]
|
inlineinherited |
◆ asString() [2/2]
|
inlineinherited |
Returns a human-readable textual representation of the object (eg: "[0.02 1.04]" )
- See also
- fromString
◆ asTPoint()
| mrpt::math::TPoint2D CPoint2D::asTPoint | ( | ) | const |
Definition at line 72 of file CPoint2D.cpp.
◆ clone()
|
overridevirtual |
Returns a deep copy (clone) of the object, indepently of its class.
Implements mrpt::rtti::CObject.
◆ Create()
|
inlinestatic |
Definition at line 38 of file CPoint2D.h.
◆ CreateObject()
|
static |
◆ CreateUnique()
|
inlinestatic |
Definition at line 38 of file CPoint2D.h.
◆ derived() [1/2]
|
inlineprivateinherited |
◆ derived() [2/2]
|
inlineprivateinherited |
◆ distance2DTo()
|
inlineinherited |
Returns the 2D distance from this pose/point to a 2D point (ignores Z, if it exists).
Definition at line 234 of file CPoseOrPoint.h.
◆ distance2DToSquare()
|
inlineinherited |
Returns the squared 2D distance from this pose/point to a 2D point (ignores Z, if it exists).
Definition at line 218 of file CPoseOrPoint.h.
◆ distance3DTo()
|
inlineinherited |
Returns the 3D distance from this pose/point to a 3D point.
Definition at line 240 of file CPoseOrPoint.h.
◆ distance3DToSquare()
|
inlineinherited |
Returns the squared 3D distance from this pose/point to a 3D point.
Definition at line 225 of file CPoseOrPoint.h.
◆ distanceTo() [1/2]
|
inlineinherited |
Returns the Euclidean distance to another pose/point:
Definition at line 211 of file CPoseOrPoint.h.
◆ distanceTo() [2/2]
|
inlineinherited |
Returns the euclidean distance to a 3D point:
Definition at line 246 of file CPoseOrPoint.h.
◆ duplicateGetSmartPtr()
|
inlineinherited |
Returns a copy of the object, indepently of its class, as a smart pointer (the newly created object will exist as long as any copy of this smart pointer).
Definition at line 169 of file CObject.h.
References mrpt::rtti::CObject::clone().
Referenced by mrpt::obs::CRawlog::addActions(), and mrpt::obs::CRawlog::addObservations().
◆ empty()
|
inlinestatic |
Definition at line 108 of file CPoint2D.h.
◆ fromString()
|
inlineinherited |
◆ getAsVector() [1/2]
|
inlineinherited |
◆ getAsVector() [2/2]
|
inlineinherited |
◆ getAsVectorVal()
|
inlineinherited |
Return the pose or point as a 1xN vector with all the components (see derived classes for each implementation)
Definition at line 263 of file CPoseOrPoint.h.
◆ getClassName()
|
inlinestaticconstexpr |
Definition at line 38 of file CPoint2D.h.
◆ getHomogeneousMatrix()
|
inlineinherited |
Returns the corresponding 4x4 homogeneous transformation matrix for the point(translation) or pose (translation+orientation).
- See also
- getInverseHomogeneousMatrix
◆ getHomogeneousMatrixVal()
|
inlineinherited |
Returns the corresponding 4x4 homogeneous transformation matrix for the point(translation) or pose (translation+orientation).
- See also
- getInverseHomogeneousMatrix
Definition at line 275 of file CPoseOrPoint.h.
◆ getInverseHomogeneousMatrix()
|
inlineinherited |
Returns the corresponding 4x4 inverse homogeneous transformation matrix for this point or pose.
- See also
- getHomogeneousMatrix
Definition at line 287 of file CPoseOrPoint.h.
◆ getInverseHomogeneousMatrixVal()
|
inlineinherited |
This is an overloaded member function, provided for convenience. It differs from the above function only in what argument(s) it accepts.
Definition at line 295 of file CPoseOrPoint.h.
◆ GetRuntimeClass()
|
overridevirtual |
Returns information about the class of an object in runtime.
Reimplemented from mrpt::serialization::CSerializable.
◆ GetRuntimeClassIdStatic()
|
static |
◆ is3DPoseOrPoint()
|
inlinestaticinherited |
Return true for poses or points with a Z component, false otherwise.
Definition at line 177 of file CPoseOrPoint.h.
◆ is_3D()
|
inlinestatic |
Definition at line 87 of file CPoint2D.h.
References is_3D_val.
◆ is_PDF()
|
inlinestatic |
Definition at line 92 of file CPoint2D.h.
References is_PDF_val.
◆ max_size()
|
inlinestatic |
Definition at line 109 of file CPoint2D.h.
References static_size.
◆ norm()
|
inlineinherited |
Returns the euclidean norm of vector: .
Definition at line 253 of file CPoseOrPoint.h.
◆ operator delete() [1/3]
Definition at line 38 of file CPoint2D.h.
◆ operator delete() [2/3]
Definition at line 38 of file CPoint2D.h.
◆ operator delete() [3/3]
Definition at line 38 of file CPoint2D.h.
◆ operator delete[]()
Definition at line 38 of file CPoint2D.h.
◆ operator new() [1/3]
|
inline |
Definition at line 38 of file CPoint2D.h.
◆ operator new() [2/3]
|
inlinenoexcept |
Definition at line 38 of file CPoint2D.h.
◆ operator new() [3/3]
Definition at line 38 of file CPoint2D.h.
◆ operator new[]()
|
inline |
Definition at line 38 of file CPoint2D.h.
◆ operator*=()
|
inlineinherited |
◆ operator-()
The operator D="this"-b is the pose inverse compounding operator, the resulting points "D" fulfils: "this" = b + D, so that: b == a + (b-a)
Definition at line 56 of file CPoint2D.cpp.
◆ operator[]() [1/2]
|
inlineinherited |
◆ operator[]() [2/2]
|
inlineinherited |
◆ resize()
|
inlinestatic |
Definition at line 110 of file CPoint2D.h.
References mrpt::format(), and static_size.
◆ serializeFrom()
|
overrideprotectedvirtual |
Pure virtual method for reading (deserializing) from an abstract archive.
Users don't call this method directly. Instead, use stream >> object;.
- Parameters
-
in The input binary stream where the object data must read from. version The version of the object stored in the stream: use this version number in your code to know how to read the incoming data.
- Exceptions
-
std::exception On any I/O error
Implements mrpt::serialization::CSerializable.
Definition at line 27 of file CPoint2D.cpp.
References MRPT_THROW_UNKNOWN_SERIALIZATION_VERSION.
◆ serializeGetVersion()
|
overrideprotectedvirtual |
Must return the current versioning number of the object.
Start in zero for new classes, and increments each time there is a change in the stored format.
Implements mrpt::serialization::CSerializable.
Definition at line 22 of file CPoint2D.cpp.
◆ serializeTo()
|
overrideprotectedvirtual |
Pure virtual method for writing (serializing) to an abstract archive.
Users don't call this method directly. Instead, use stream << object;.
- Exceptions
-
std::exception On any I/O error
Implements mrpt::serialization::CSerializable.
Definition at line 23 of file CPoint2D.cpp.
◆ setToNaN()
|
overridevirtual |
Set all data fields to quiet NaN.
Implements mrpt::poses::CPoseOrPoint< CPoint2D >.
Definition at line 66 of file CPoint2D.cpp.
◆ size()
|
inlinestatic |
Definition at line 107 of file CPoint2D.h.
References static_size.
◆ sqrDistanceTo()
|
inlineinherited |
Returns the squared euclidean distance to another pose/point:
Definition at line 184 of file CPoseOrPoint.h.
◆ writeToMatlab()
|
inlinevirtualinherited |
Introduces a pure virtual method responsible for writing to a mxArray Matlab object, typically a MATLAB struct whose contents are documented in each derived class.
- Returns
- A new
mxArray(caller is responsible of memory freeing) or nullptr is class does not support conversion to MATLAB.
Definition at line 70 of file CSerializable.h.
◆ x() [1/3]
|
inlineinherited |
Definition at line 149 of file CPoseOrPoint.h.
◆ x() [2/3]
|
inlineinherited |
Common members of all points & poses classes.
< Get X coord.
Definition at line 140 of file CPoseOrPoint.h.
◆ x() [3/3]
|
inlineinherited |
- Parameters
-
v Set X coord.
Definition at line 158 of file CPoseOrPoint.h.
◆ x_incr()
|
inlineinherited |
- Parameters
-
v X+=v
Definition at line 167 of file CPoseOrPoint.h.
◆ y() [1/3]
|
inlineinherited |
Definition at line 153 of file CPoseOrPoint.h.
◆ y() [2/3]
|
inlineinherited |
< Get Y coord.
Definition at line 144 of file CPoseOrPoint.h.
◆ y() [3/3]
|
inlineinherited |
- Parameters
-
v Set Y coord.
Definition at line 162 of file CPoseOrPoint.h.
◆ y_incr()
|
inlineinherited |
- Parameters
-
v Y+=v
Definition at line 171 of file CPoseOrPoint.h.
Member Data Documentation
◆ _init_CPoint2D
|
staticprotected |
Definition at line 38 of file CPoint2D.h.
◆ className
|
staticconstexpr |
Definition at line 38 of file CPoint2D.h.
◆ m_coords
| mrpt::math::CArrayDouble<2> mrpt::poses::CPoint2D::m_coords |
◆ runtimeClassId
|
staticprotected |
Definition at line 38 of file CPoint2D.h.