Detailed Description
A class for storing an occupancy grid map.
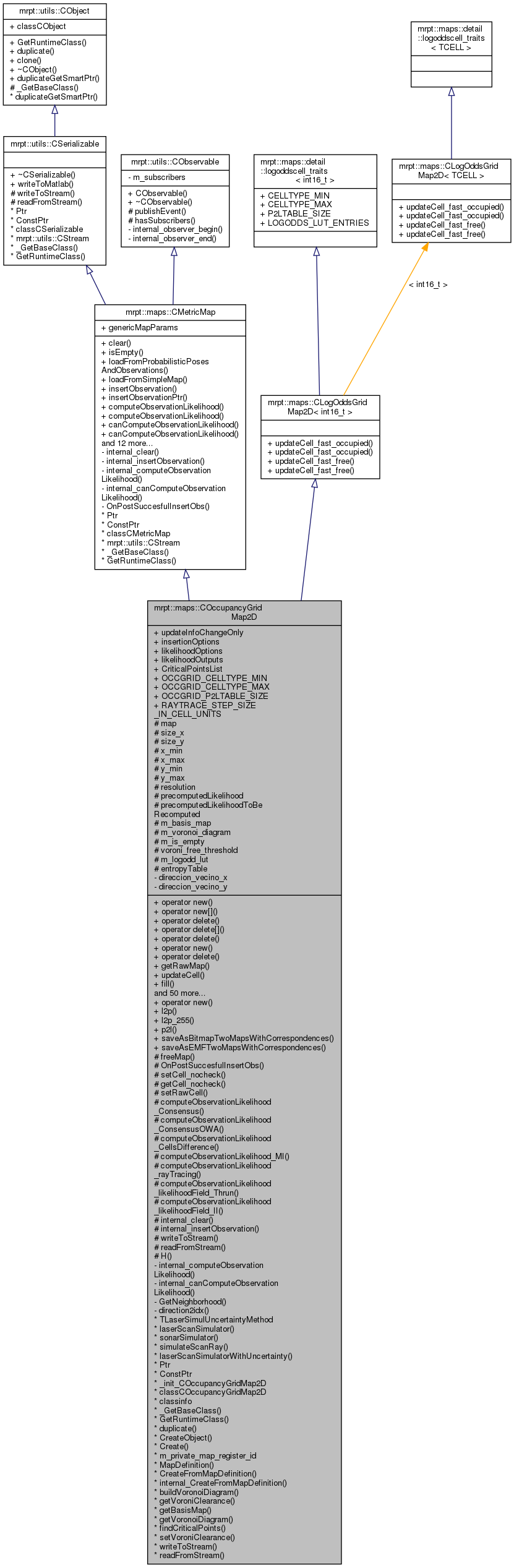
COccupancyGridMap2D is a class for storing a metric map representation in the form of a probabilistic occupancy grid map: value of 0 means certainly occupied, 1 means a certainly empty cell. Initially 0.5 means uncertainty.
The cells keep the log-odd representation of probabilities instead of the probabilities themselves. More details can be found at http://www.mrpt.org/Occupancy_Grids
The algorithm for updating the grid from a laser scanner can optionally take into account the progressive widening of the beams, as described in this page
Some implemented methods are:
- Update of individual cells
- Insertion of observations
- Voronoi diagram and critical points (buildVoronoiDiagram)
- Saving and loading from/to a bitmap
- Laser scans simulation for the map contents
- Entropy and information methods (See computeEntropy)
Definition at line 62 of file maps/COccupancyGridMap2D.h.
#include <mrpt/maps/COccupancyGridMap2D.h>
Classes | |
| struct | TCriticalPointsList |
| The structure used to store the set of Voronoi diagram critical points. More... | |
| struct | TEntropyInfo |
| Used for returning entropy related information. More... | |
| class | TInsertionOptions |
| With this struct options are provided to the observation insertion process. More... | |
| struct | TLaserSimulUncertaintyParams |
| Input params for laserScanSimulatorWithUncertainty() More... | |
| struct | TLaserSimulUncertaintyResult |
| Output params for laserScanSimulatorWithUncertainty() More... | |
| class | TLikelihoodOptions |
| With this struct options are provided to the observation likelihood computation process. More... | |
| class | TLikelihoodOutput |
| Some members of this struct will contain intermediate or output data after calling "computeObservationLikelihood" for some likelihood functions. More... | |
| struct | TMapDefinition |
| struct | TMapDefinitionBase |
| struct | TUpdateCellsInfoChangeOnly |
| An internal structure for storing data related to counting the new information apported by some observation. More... | |
Public Types | |
| enum | TLikelihoodMethod { lmMeanInformation = 0, lmRayTracing, lmConsensus, lmCellsDifference, lmLikelihoodField_Thrun, lmLikelihoodField_II, lmConsensusOWA } |
| The type for selecting a likelihood computation method. More... | |
| typedef int16_t | cellType |
| The type of the map cells: More... | |
| typedef uint16_t | cellTypeUnsigned |
| typedef std::pair< double, mrpt::math::TPoint2D > | TPairLikelihoodIndex |
| Auxiliary private class. More... | |
| typedef int16_t | cell_t |
| The type of cells. More... | |
| typedef detail::logoddscell_traits< int16_t > | traits_t |
Public Member Functions | |
| void * | operator new (size_t size) |
| void * | operator new[] (size_t size) |
| void | operator delete (void *ptr) throw () |
| void | operator delete[] (void *ptr) throw () |
| void | operator delete (void *memory, void *ptr) throw () |
| void * | operator new (size_t size, const std::nothrow_t &) throw () |
| void | operator delete (void *ptr, const std::nothrow_t &) throw () |
| const std::vector< cellType > & | getRawMap () const |
| Read-only access to the raw cell contents (cells are in log-odd units) More... | |
| void | updateCell (int x, int y, float v) |
| Performs the Bayesian fusion of a new observation of a cell. More... | |
| void | fill (float default_value=0.5f) |
| Fills all the cells with a default value. More... | |
| COccupancyGridMap2D (float min_x=-20.0f, float max_x=20.0f, float min_y=-20.0f, float max_y=20.0f, float resolution=0.05f) | |
| Constructor. More... | |
| virtual | ~COccupancyGridMap2D () |
| Destructor. More... | |
| void | setSize (float x_min, float x_max, float y_min, float y_max, float resolution, float default_value=0.5f) |
| Change the size of gridmap, erasing all its previous contents. More... | |
| void | resizeGrid (float new_x_min, float new_x_max, float new_y_min, float new_y_max, float new_cells_default_value=0.5f, bool additionalMargin=true) MRPT_NO_THROWS |
| Change the size of gridmap, maintaining previous contents. More... | |
| double | getArea () const |
| Returns the area of the gridmap, in square meters. More... | |
| unsigned int | getSizeX () const |
| Returns the horizontal size of grid map in cells count. More... | |
| unsigned int | getSizeY () const |
| Returns the vertical size of grid map in cells count. More... | |
| float | getXMin () const |
| Returns the "x" coordinate of left side of grid map. More... | |
| float | getXMax () const |
| Returns the "x" coordinate of right side of grid map. More... | |
| float | getYMin () const |
| Returns the "y" coordinate of top side of grid map. More... | |
| float | getYMax () const |
| Returns the "y" coordinate of bottom side of grid map. More... | |
| float | getResolution () const |
| Returns the resolution of the grid map. More... | |
| int | x2idx (float x) const |
| Transform a coordinate value into a cell index. More... | |
| int | y2idx (float y) const |
| int | x2idx (double x) const |
| int | y2idx (double y) const |
| float | idx2x (const size_t cx) const |
| Transform a cell index into a coordinate value. More... | |
| float | idx2y (const size_t cy) const |
| int | x2idx (float x, float x_min) const |
| Transform a coordinate value into a cell index, using a diferent "x_min" value. More... | |
| int | y2idx (float y, float y_min) const |
| void | setCell (int x, int y, float value) |
| Change the contents [0,1] of a cell, given its index. More... | |
| float | getCell (int x, int y) const |
| Read the real valued [0,1] contents of a cell, given its index. More... | |
| cellType * | getRow (int cy) |
| Access to a "row": mainly used for drawing grid as a bitmap efficiently, do not use it normally. More... | |
| const cellType * | getRow (int cy) const |
| Access to a "row": mainly used for drawing grid as a bitmap efficiently, do not use it normally. More... | |
| void | setPos (float x, float y, float value) |
| Change the contents [0,1] of a cell, given its coordinates. More... | |
| float | getPos (float x, float y) const |
| Read the real valued [0,1] contents of a cell, given its coordinates. More... | |
| bool | isStaticPos (float x, float y, float threshold=0.7f) const |
| Returns "true" if cell is "static", i.e.if its occupancy is below a given threshold. More... | |
| bool | isStaticCell (int cx, int cy, float threshold=0.7f) const |
| void | setBasisCell (int x, int y, uint8_t value) |
| Change a cell in the "basis" maps.Used for Voronoi calculation. More... | |
| unsigned char | getBasisCell (int x, int y) const |
| Reads a cell in the "basis" maps.Used for Voronoi calculation. More... | |
| void | copyMapContentFrom (const COccupancyGridMap2D &otherMap) |
| copy the gridmap contents, but not all the options, from another map instance More... | |
| void | subSample (int downRatio) |
| Performs a downsampling of the gridmap, by a given factor: resolution/=ratio. More... | |
| void | computeEntropy (TEntropyInfo &info) const |
| Computes the entropy and related values of this grid map. More... | |
| int | computeClearance (int cx, int cy, int *basis_x, int *basis_y, int *nBasis, bool GetContourPoint=false) const |
| Compute the clearance of a given cell, and returns its two first basis (closest obstacle) points.Used to build Voronoi and critical points. More... | |
| float | computeClearance (float x, float y, float maxSearchDistance) const |
| An alternative method for computing the clearance of a given location (in meters). More... | |
| float | computePathCost (float x1, float y1, float x2, float y2) const |
| Compute the 'cost' of traversing a segment of the map according to the occupancy of traversed cells. More... | |
| double | computeLikelihoodField_Thrun (const CPointsMap *pm, const mrpt::poses::CPose2D *relativePose=NULL) |
| Computes the likelihood [0,1] of a set of points, given the current grid map as reference. More... | |
| double | computeLikelihoodField_II (const CPointsMap *pm, const mrpt::poses::CPose2D *relativePose=NULL) |
| Computes the likelihood [0,1] of a set of points, given the current grid map as reference. More... | |
| bool | saveAsBitmapFile (const std::string &file) const |
| Saves the gridmap as a graphical file (BMP,PNG,...). More... | |
| template<class CLANDMARKSMAP > | |
| bool | saveAsBitmapFileWithLandmarks (const std::string &file, const CLANDMARKSMAP *landmarks, bool addTextLabels=false, const mrpt::utils::TColor &marks_color=mrpt::utils::TColor(0, 0, 255)) const |
| Saves the gridmap as a graphical bitmap file, 8 bit gray scale, 1 pixel is 1 cell, and with an overlay of landmarks. More... | |
| void | getAsImage (utils::CImage &img, bool verticalFlip=false, bool forceRGB=false, bool tricolor=false) const |
| Returns the grid as a 8-bit graylevel image, where each pixel is a cell (output image is RGB only if forceRGB is true) If "tricolor" is true, only three gray levels will appear in the image: gray for unobserved cells, and black/white for occupied/empty cells respectively. More... | |
| void | getAsImageFiltered (utils::CImage &img, bool verticalFlip=false, bool forceRGB=false) const |
| Returns the grid as a 8-bit graylevel image, where each pixel is a cell (output image is RGB only if forceRGB is true) - This method filters the image for easy feature detection If "tricolor" is true, only three gray levels will appear in the image: gray for unobserved cells, and black/white for occupied/empty cells respectively. More... | |
| void | getAs3DObject (mrpt::opengl::CSetOfObjectsPtr &outObj) const MRPT_OVERRIDE |
| Returns a 3D plane with its texture being the occupancy grid and transparency proportional to "uncertainty" (i.e. More... | |
| void | getAsPointCloud (mrpt::maps::CSimplePointsMap &pm, const float occup_threshold=0.5f) const |
| Get a point cloud with all (border) occupied cells as points. More... | |
| bool | isEmpty () const MRPT_OVERRIDE |
| Returns true upon map construction or after calling clear(), the return changes to false upon successful insertObservation() or any other method to load data in the map. More... | |
| bool | loadFromBitmapFile (const std::string &file, float resolution, float origin_xPixel=std::numeric_limits< float >::max(), float origin_yPixel=std::numeric_limits< float >::max()) |
| Load the gridmap from a image in a file (the format can be any supported by CImage::loadFromFile). More... | |
| bool | loadFromBitmap (const mrpt::utils::CImage &img, float resolution, float origin_xPixel=std::numeric_limits< float >::max(), float origin_yPixel=std::numeric_limits< float >::max()) |
| Load the gridmap from a image in a file (the format can be any supported by CImage::loadFromFile). More... | |
| virtual void | determineMatching2D (const mrpt::maps::CMetricMap *otherMap, const mrpt::poses::CPose2D &otherMapPose, mrpt::utils::TMatchingPairList &correspondences, const TMatchingParams ¶ms, TMatchingExtraResults &extraResults) const MRPT_OVERRIDE |
| See the base class for more details: In this class it is implemented as correspondences of the passed points map to occupied cells. More... | |
| float | compute3DMatchingRatio (const mrpt::maps::CMetricMap *otherMap, const mrpt::poses::CPose3D &otherMapPose, const TMatchingRatioParams ¶ms) const MRPT_OVERRIDE |
| See docs in base class: in this class this always returns 0. More... | |
| void | saveMetricMapRepresentationToFile (const std::string &filNamePrefix) const MRPT_OVERRIDE |
| This virtual method saves the map to a file "filNamePrefix"+< some_file_extension >, as an image or in any other applicable way (Notice that other methods to save the map may be implemented in classes implementing this virtual interface). More... | |
| void | clear () |
| Erase all the contents of the map. More... | |
| void | loadFromProbabilisticPosesAndObservations (const mrpt::maps::CSimpleMap &Map) |
| Load the map contents from a CSimpleMap object, erasing all previous content of the map. More... | |
| void | loadFromSimpleMap (const mrpt::maps::CSimpleMap &Map) |
| Load the map contents from a CSimpleMap object, erasing all previous content of the map. More... | |
| bool | insertObservation (const mrpt::obs::CObservation *obs, const mrpt::poses::CPose3D *robotPose=NULL) |
| Insert the observation information into this map. More... | |
| bool | insertObservationPtr (const mrpt::obs::CObservationPtr &obs, const mrpt::poses::CPose3D *robotPose=NULL) |
| A wrapper for smart pointers, just calls the non-smart pointer version. More... | |
| double | computeObservationLikelihood (const mrpt::obs::CObservation *obs, const mrpt::poses::CPose3D &takenFrom) |
| Computes the log-likelihood of a given observation given an arbitrary robot 3D pose. More... | |
| double | computeObservationLikelihood (const mrpt::obs::CObservation *obs, const mrpt::poses::CPose2D &takenFrom) |
| virtual bool | canComputeObservationLikelihood (const mrpt::obs::CObservation *obs) const |
| Returns true if this map is able to compute a sensible likelihood function for this observation (i.e. More... | |
| bool | canComputeObservationLikelihood (const mrpt::obs::CObservationPtr &obs) const |
| double | computeObservationsLikelihood (const mrpt::obs::CSensoryFrame &sf, const mrpt::poses::CPose2D &takenFrom) |
| Returns the sum of the log-likelihoods of each individual observation within a mrpt::obs::CSensoryFrame. More... | |
| bool | canComputeObservationsLikelihood (const mrpt::obs::CSensoryFrame &sf) const |
| Returns true if this map is able to compute a sensible likelihood function for this observation (i.e. More... | |
| virtual void | determineMatching3D (const mrpt::maps::CMetricMap *otherMap, const mrpt::poses::CPose3D &otherMapPose, mrpt::utils::TMatchingPairList &correspondences, const TMatchingParams ¶ms, TMatchingExtraResults &extraResults) const |
| Computes the matchings between this and another 3D points map - method used in 3D-ICP. More... | |
| virtual void | auxParticleFilterCleanUp () |
| This method is called at the end of each "prediction-update-map insertion" cycle within "mrpt::slam::CMetricMapBuilderRBPF::processActionObservation". More... | |
| virtual float | squareDistanceToClosestCorrespondence (float x0, float y0) const |
| Returns the square distance from the 2D point (x0,y0) to the closest correspondence in the map. More... | |
| virtual const mrpt::maps::CSimplePointsMap * | getAsSimplePointsMap () const |
| If the map is a simple points map or it's a multi-metric map that contains EXACTLY one simple points map, return it. More... | |
| virtual mrpt::maps::CSimplePointsMap * | getAsSimplePointsMap () |
| virtual mxArray * | writeToMatlab () const |
Introduces a pure virtual method responsible for writing to a mxArray Matlab object, typically a MATLAB struct whose contents are documented in each derived class. More... | |
| CObject * | clone () const |
| Cloning interface for smart pointers. More... | |
RTTI classes and functions | |
| mrpt::utils::CObjectPtr | duplicateGetSmartPtr () const |
| Returns a copy of the object, indepently of its class, as a smart pointer (the newly created object will exist as long as any copy of this smart pointer). More... | |
Static Public Member Functions | |
| static void * | operator new (size_t size, void *ptr) |
| static float | l2p (const cellType l) |
| Scales an integer representation of the log-odd into a real valued probability in [0,1], using p=exp(l)/(1+exp(l)) More... | |
| static uint8_t | l2p_255 (const cellType l) |
| Scales an integer representation of the log-odd into a linear scale [0,255], using p=exp(l)/(1+exp(l)) More... | |
| static cellType | p2l (const float p) |
| Scales a real valued probability in [0,1] to an integer representation of: log(p)-log(1-p) in the valid range of cellType. More... | |
| static bool | saveAsBitmapTwoMapsWithCorrespondences (const std::string &fileName, const COccupancyGridMap2D *m1, const COccupancyGridMap2D *m2, const mrpt::utils::TMatchingPairList &corrs) |
| Saves a composite image with two gridmaps and lines representing a set of correspondences between them. More... | |
| static bool | saveAsEMFTwoMapsWithCorrespondences (const std::string &fileName, const COccupancyGridMap2D *m1, const COccupancyGridMap2D *m2, const mrpt::utils::TMatchingPairList &corrs) |
| Saves a composite image with two gridmaps and numbers for the correspondences between them. More... | |
| static void | updateCell_fast_occupied (const unsigned x, const unsigned y, const cell_t logodd_obs, const cell_t thres, cell_t *mapArray, const unsigned _size_x) |
| Performs the Bayesian fusion of a new observation of a cell, without checking for grid limits nor updateInfoChangeOnly. More... | |
| static void | updateCell_fast_occupied (cell_t *theCell, const cell_t logodd_obs, const cell_t thres) |
| Performs the Bayesian fusion of a new observation of a cell, without checking for grid limits nor updateInfoChangeOnly. More... | |
| static void | updateCell_fast_free (const unsigned x, const unsigned y, const cell_t logodd_obs, const cell_t thres, cell_t *mapArray, const unsigned _size_x) |
| Performs the Bayesian fusion of a new observation of a cell, without checking for grid limits nor updateInfoChangeOnly. More... | |
| static void | updateCell_fast_free (cell_t *theCell, const cell_t logodd_obs, const cell_t thres) |
| Performs the Bayesian fusion of a new observation of a cell, without checking for grid limits nor updateInfoChangeOnly. More... | |
Public Attributes | |
| struct MAPS_IMPEXP mrpt::maps::COccupancyGridMap2D::TUpdateCellsInfoChangeOnly | updateInfoChangeOnly |
| TInsertionOptions | insertionOptions |
| With this struct options are provided to the observation insertion process. More... | |
| mrpt::maps::COccupancyGridMap2D::TLikelihoodOptions | likelihoodOptions |
| class mrpt::maps::COccupancyGridMap2D::TLikelihoodOutput | likelihoodOutputs |
| struct MAPS_IMPEXP mrpt::maps::COccupancyGridMap2D::TCriticalPointsList | CriticalPointsList |
| TMapGenericParams | genericMapParams |
| Common params to all maps. More... | |
Static Public Attributes | |
| static const cellType | OCCGRID_CELLTYPE_MIN = CLogOddsGridMap2D<cellType>::CELLTYPE_MIN |
| Discrete to float conversion factors: The min/max values of the integer cell type, eg. More... | |
| static const cellType | OCCGRID_CELLTYPE_MAX = CLogOddsGridMap2D<cellType>::CELLTYPE_MAX |
| static const cellType | OCCGRID_P2LTABLE_SIZE = CLogOddsGridMap2D<cellType>::P2LTABLE_SIZE |
| static double | RAYTRACE_STEP_SIZE_IN_CELL_UNITS = 0.8 |
| (Default:1.0) Can be set to <1 if a more fine raytracing is needed in sonarSimulator() and laserScanSimulator(), or >1 to speed it up. More... | |
| static const mrpt::utils::TRuntimeClassId | classCObject |
| static const int16_t | CELLTYPE_MIN = -32767 |
| static const int16_t | CELLTYPE_MAX = 32767 |
| static const int16_t | P2LTABLE_SIZE = CELLTYPE_MAX |
| static const size_t | LOGODDS_LUT_ENTRIES = 1<<16 |
RTTI stuff | |
| static const mrpt::utils::TRuntimeClassId | classCMetricMap |
RTTI stuff | |
| static const mrpt::utils::TRuntimeClassId | classCSerializable |
Protected Member Functions | |
| void | freeMap () |
| Frees the dynamic memory buffers of map. More... | |
| virtual void | OnPostSuccesfulInsertObs (const mrpt::obs::CObservation *) MRPT_OVERRIDE |
| See base class. More... | |
| void | setCell_nocheck (int x, int y, float value) |
| Change the contents [0,1] of a cell, given its index. More... | |
| float | getCell_nocheck (int x, int y) const |
| Read the real valued [0,1] contents of a cell, given its index. More... | |
| void | setRawCell (unsigned int cellIndex, cellType b) |
| Changes a cell by its absolute index (Do not use it normally) More... | |
| double | computeObservationLikelihood_Consensus (const mrpt::obs::CObservation *obs, const mrpt::poses::CPose2D &takenFrom) |
| One of the methods that can be selected for implementing "computeObservationLikelihood" (This method is the Range-Scan Likelihood Consensus for gridmaps, see the ICRA2007 paper by Blanco et al.) More... | |
| double | computeObservationLikelihood_ConsensusOWA (const mrpt::obs::CObservation *obs, const mrpt::poses::CPose2D &takenFrom) |
| One of the methods that can be selected for implementing "computeObservationLikelihood". More... | |
| double | computeObservationLikelihood_CellsDifference (const mrpt::obs::CObservation *obs, const mrpt::poses::CPose2D &takenFrom) |
| One of the methods that can be selected for implementing "computeObservationLikelihood". More... | |
| double | computeObservationLikelihood_MI (const mrpt::obs::CObservation *obs, const mrpt::poses::CPose2D &takenFrom) |
| One of the methods that can be selected for implementing "computeObservationLikelihood". More... | |
| double | computeObservationLikelihood_rayTracing (const mrpt::obs::CObservation *obs, const mrpt::poses::CPose2D &takenFrom) |
| One of the methods that can be selected for implementing "computeObservationLikelihood". More... | |
| double | computeObservationLikelihood_likelihoodField_Thrun (const mrpt::obs::CObservation *obs, const mrpt::poses::CPose2D &takenFrom) |
| One of the methods that can be selected for implementing "computeObservationLikelihood". More... | |
| double | computeObservationLikelihood_likelihoodField_II (const mrpt::obs::CObservation *obs, const mrpt::poses::CPose2D &takenFrom) |
| One of the methods that can be selected for implementing "computeObservationLikelihood". More... | |
| virtual void | internal_clear () MRPT_OVERRIDE |
| Clear the map: It set all cells to their default occupancy value (0.5), without changing the resolution (the grid extension is reset to the default values). More... | |
| virtual bool | internal_insertObservation (const mrpt::obs::CObservation *obs, const mrpt::poses::CPose3D *robotPose=NULL) MRPT_OVERRIDE |
| Insert the observation information into this map. More... | |
| void | publishEvent (const mrptEvent &e) const |
| Called when you want this object to emit an event to all the observers currently subscribed to this object. More... | |
| bool | hasSubscribers () const |
| Can be called by a derived class before preparing an event for publishing with publishEvent to determine if there is no one subscribed, so it can save the wasted time preparing an event that will be not read. More... | |
CSerializable virtual methods | |
| void | writeToStream (mrpt::utils::CStream &out, int *getVersion) const |
| Introduces a pure virtual method responsible for writing to a CStream. More... | |
| void | readFromStream (mrpt::utils::CStream &in, int version) |
| Introduces a pure virtual method responsible for loading from a CStream This can not be used directly be users, instead use "stream >> object;" for reading it from a stream or "stream >> object_ptr;" if the class is unknown apriori. More... | |
Static Protected Member Functions | |
| static double | H (double p) |
| Entropy computation internal function: More... | |
Protected Attributes | |
| std::vector< cellType > | map |
| Store of cell occupancy values. Order: row by row, from left to right. More... | |
| uint32_t | size_x |
| uint32_t | size_y |
| The size of the grid in cells. More... | |
| float | x_min |
| float | x_max |
| float | y_min |
| float | y_max |
| The limits of the grid in "units" (meters) More... | |
| float | resolution |
| Cell size, i.e. resolution of the grid map. More... | |
| std::vector< double > | precomputedLikelihood |
| Auxiliary variables to speed up the computation of observation likelihood values for LF method among others, at a high cost in memory (see TLikelihoodOptions::enableLikelihoodCache). More... | |
| bool | precomputedLikelihoodToBeRecomputed |
| mrpt::utils::CDynamicGrid< uint8_t > | m_basis_map |
| Used for Voronoi calculation.Same struct as "map", but contains a "0" if not a basis point. More... | |
| mrpt::utils::CDynamicGrid< uint16_t > | m_voronoi_diagram |
| Used to store the Voronoi diagram. More... | |
| bool | m_is_empty |
| True upon construction; used by isEmpty() More... | |
| float | voroni_free_threshold |
| The free-cells threshold used to compute the Voronoi diagram. More... | |
Static Protected Attributes | |
| static CLogOddsGridMapLUT< cellType > | m_logodd_lut |
| Lookup tables for log-odds. More... | |
| static std::vector< float > | entropyTable |
| Internally used to speed-up entropy calculation. More... | |
Private Member Functions | |
| double | internal_computeObservationLikelihood (const mrpt::obs::CObservation *obs, const mrpt::poses::CPose3D &takenFrom) MRPT_OVERRIDE |
| Internal method called by computeObservationLikelihood() More... | |
| bool | internal_canComputeObservationLikelihood (const mrpt::obs::CObservation *obs) const MRPT_OVERRIDE |
| Returns true if this map is able to compute a sensible likelihood function for this observation (i.e. More... | |
| unsigned char | GetNeighborhood (int cx, int cy) const |
| Returns a byte with the occupancy of the 8 sorrounding cells. More... | |
| int | direction2idx (int dx, int dy) |
| Returns the index [0,7] of the given movement, or -1 if invalid one. More... | |
Private Attributes | |
| int | direccion_vecino_x [8] |
| Used to store the 8 possible movements from a cell to the sorrounding ones.Filled in the constructor. More... | |
| int | direccion_vecino_y [8] |
Friends | |
| class | CMultiMetricMap |
| Backward compatible typedef. More... | |
| class | CMultiMetricMapPDF |
| Backward compatible typedef. More... | |
RTTI stuff | |
| typedef COccupancyGridMap2DPtr | Ptr |
| typedef COccupancyGridMap2DPtr | ConstPtr |
| static mrpt::utils::CLASSINIT | _init_COccupancyGridMap2D |
| static mrpt::utils::TRuntimeClassId | classCOccupancyGridMap2D |
| static const mrpt::utils::TRuntimeClassId * | classinfo |
| static const mrpt::utils::TRuntimeClassId * | _GetBaseClass () |
| virtual const mrpt::utils::TRuntimeClassId * | GetRuntimeClass () const |
| Returns information about the class of an object in runtime. More... | |
| virtual mrpt::utils::CObject * | duplicate () const |
| Returns a copy of the object, indepently of its class. More... | |
| static mrpt::utils::CObject * | CreateObject () |
| static COccupancyGridMap2DPtr | Create () |
Voronoi methods | |
| void | buildVoronoiDiagram (float threshold, float robot_size, int x1=0, int x2=0, int y1=0, int y2=0) |
| Build the Voronoi diagram of the grid map. More... | |
| uint16_t | getVoroniClearance (int cx, int cy) const |
| Reads a the clearance of a cell (in centimeters), after building the Voronoi diagram with buildVoronoiDiagram. More... | |
| const mrpt::utils::CDynamicGrid< uint8_t > & | getBasisMap () const |
| Return the auxiliary "basis" map built while building the Voronoi diagram. More... | |
| const mrpt::utils::CDynamicGrid< uint16_t > & | getVoronoiDiagram () const |
| Return the Voronoi diagram; each cell contains the distance to its closer obstacle, or 0 if not part of the Voronoi diagram. More... | |
| void | findCriticalPoints (float filter_distance) |
| Builds a list with the critical points from Voronoi diagram, which must must be built before calling this method. More... | |
| void | setVoroniClearance (int cx, int cy, uint16_t dist) |
| Used to set the clearance of a cell, while building the Voronoi diagram. More... | |
Sensor simulators | |
| enum | TLaserSimulUncertaintyMethod { sumUnscented = 0, sumMonteCarlo } |
| Methods for TLaserSimulUncertaintyParams in laserScanSimulatorWithUncertainty() More... | |
| void | laserScanSimulator (mrpt::obs::CObservation2DRangeScan &inout_Scan, const mrpt::poses::CPose2D &robotPose, float threshold=0.6f, size_t N=361, float noiseStd=0, unsigned int decimation=1, float angleNoiseStd=mrpt::utils::DEG2RAD(0)) const |
| Simulates a laser range scan into the current grid map. More... | |
| void | sonarSimulator (mrpt::obs::CObservationRange &inout_observation, const mrpt::poses::CPose2D &robotPose, float threshold=0.5f, float rangeNoiseStd=0.f, float angleNoiseStd=mrpt::utils::DEG2RAD(0.f)) const |
| Simulates the observations of a sonar rig into the current grid map. More... | |
| void | simulateScanRay (const double x, const double y, const double angle_direction, float &out_range, bool &out_valid, const double max_range_meters, const float threshold_free=0.4f, const double noiseStd=.0, const double angleNoiseStd=.0) const |
| Simulate just one "ray" in the grid map. More... | |
| void | laserScanSimulatorWithUncertainty (const TLaserSimulUncertaintyParams &in_params, TLaserSimulUncertaintyResult &out_results) const |
| Like laserScanSimulatorWithUncertainty() (see it for a discussion of most parameters) but taking into account the robot pose uncertainty and generating a vector of predicted variances for each ray. More... | |
Map Definition Interface stuff (see mrpt::maps::TMetricMapInitializer) @{ | |
| static const size_t | m_private_map_register_id = mrpt::maps::internal::TMetricMapTypesRegistry::Instance().doRegister( "COccupancyGridMap2D,occupancyGrid" ,& mrpt::maps::COccupancyGridMap2D ::MapDefinition,& mrpt::maps::COccupancyGridMap2D ::internal_CreateFromMapDefinition) |
| ID used to initialize class registration (just ignore it) More... | |
| static mrpt::maps::TMetricMapInitializer * | MapDefinition () |
| Returns default map definition initializer. More... | |
| static COccupancyGridMap2D * | CreateFromMapDefinition (const mrpt::maps::TMetricMapInitializer &def) |
| Constructor from a map definition structure: initializes the map and its parameters accordingly. More... | |
| static mrpt::maps::CMetricMap * | internal_CreateFromMapDefinition (const mrpt::maps::TMetricMapInitializer &def) |
Member Typedef Documentation
◆ cell_t
|
inherited |
The type of cells.
Definition at line 52 of file maps/CLogOddsGridMap2D.h.
◆ cellType
The type of the map cells:
Definition at line 80 of file maps/COccupancyGridMap2D.h.
◆ cellTypeUnsigned
Definition at line 81 of file maps/COccupancyGridMap2D.h.
◆ ConstPtr
| typedef COccupancyGridMap2DPtr mrpt::maps::COccupancyGridMap2D::ConstPtr |
Definition at line 72 of file maps/COccupancyGridMap2D.h.
◆ Ptr
| typedef COccupancyGridMap2DPtr mrpt::maps::COccupancyGridMap2D::Ptr |
A typedef for the associated smart pointer
Definition at line 72 of file maps/COccupancyGridMap2D.h.
◆ TPairLikelihoodIndex
| typedef std::pair<double,mrpt::math::TPoint2D> mrpt::maps::COccupancyGridMap2D::TPairLikelihoodIndex |
Auxiliary private class.
Definition at line 434 of file maps/COccupancyGridMap2D.h.
◆ traits_t
|
inherited |
Definition at line 53 of file maps/CLogOddsGridMap2D.h.
Member Enumeration Documentation
◆ TLaserSimulUncertaintyMethod
Methods for TLaserSimulUncertaintyParams in laserScanSimulatorWithUncertainty()
| Enumerator | |
|---|---|
| sumUnscented | Performs an unscented transform. |
| sumMonteCarlo | Montecarlo-based estimation. |
Definition at line 590 of file maps/COccupancyGridMap2D.h.
◆ TLikelihoodMethod
The type for selecting a likelihood computation method.
| Enumerator | |
|---|---|
| lmMeanInformation | |
| lmRayTracing | |
| lmConsensus | |
| lmCellsDifference | |
| lmLikelihoodField_Thrun | |
| lmLikelihoodField_II | |
| lmConsensusOWA | |
Definition at line 382 of file maps/COccupancyGridMap2D.h.
Constructor & Destructor Documentation
◆ COccupancyGridMap2D()
| COccupancyGridMap2D::COccupancyGridMap2D | ( | float | min_x = -20.0f, |
| float | max_x = 20.0f, |
||
| float | min_y = -20.0f, |
||
| float | max_y = 20.0f, |
||
| float | resolution = 0.05f |
||
| ) |
Constructor.
Definition at line 92 of file COccupancyGridMap2D_common.cpp.
References MRPT_END, MRPT_START, resolution, and setSize().
◆ ~COccupancyGridMap2D()
|
virtual |
Member Function Documentation
◆ _GetBaseClass()
|
staticprotected |
◆ auxParticleFilterCleanUp()
|
inlinevirtualinherited |
This method is called at the end of each "prediction-update-map insertion" cycle within "mrpt::slam::CMetricMapBuilderRBPF::processActionObservation".
This method should normally do nothing, but in some cases can be used to free auxiliary cached variables.
Reimplemented in mrpt::maps::CLandmarksMap, and mrpt::maps::CMultiMetricMap.
Definition at line 232 of file maps/CMetricMap.h.
◆ buildVoronoiDiagram()
| void COccupancyGridMap2D::buildVoronoiDiagram | ( | float | threshold, |
| float | robot_size, | ||
| int | x1 = 0, |
||
| int | x2 = 0, |
||
| int | y1 = 0, |
||
| int | y2 = 0 |
||
| ) |
Build the Voronoi diagram of the grid map.
- Parameters
-
threshold The threshold for binarizing the map. robot_size Size in "units" (meters) of robot, approx. x1 Left coordinate of area to be computed. Default, entire map. x2 Right coordinate of area to be computed. Default, entire map. y1 Top coordinate of area to be computed. Default, entire map. y2 Bottom coordinate of area to be computed. Default, entire map.
- See also
- findCriticalPoints
Definition at line 25 of file COccupancyGridMap2D_voronoi.cpp.
References ASSERT_EQUAL_, min, and mrpt::utils::round().
◆ canComputeObservationLikelihood() [1/2]
|
virtualinherited |
Returns true if this map is able to compute a sensible likelihood function for this observation (i.e.
an occupancy grid map cannot with an image). See: Maps and observations compatibility matrix
- Parameters
-
obs The observation.
- See also
- computeObservationLikelihood, genericMapParams.enableObservationLikelihood
Definition at line 189 of file CMetricMap.cpp.
◆ canComputeObservationLikelihood() [2/2]
|
inherited |
This is an overloaded member function, provided for convenience. It differs from the above function only in what argument(s) it accepts.
◆ canComputeObservationsLikelihood()
|
inherited |
Returns true if this map is able to compute a sensible likelihood function for this observation (i.e.
an occupancy grid map cannot with an image). See: Maps and observations compatibility matrix
- Parameters
-
sf The observations.
- See also
- canComputeObservationLikelihood
Definition at line 94 of file CMetricMap.cpp.
References mrpt::obs::CSensoryFrame::begin(), and mrpt::obs::CSensoryFrame::end().
◆ clear()
|
inherited |
Erase all the contents of the map.
Definition at line 34 of file CMetricMap.cpp.
Referenced by mrpt::maps::CGasConcentrationGridMap2D::CGasConcentrationGridMap2D(), mrpt::maps::CHeightGridMap2D_MRF::CHeightGridMap2D_MRF(), mrpt::maps::CReflectivityGridMap2D::clear(), mrpt::maps::CHeightGridMap2D::clear(), mrpt::maps::CRandomFieldGridMap2D::clear(), mrpt::maps::CWirelessPowerGridMap2D::CWirelessPowerGridMap2D(), mrpt::maps::CPointsMap::extractCylinder(), mrpt::maps::CPointsMap::extractPoints(), mrpt::opengl::CAngularObservationMesh::generatePointCloud(), getAsPointCloud(), mrpt::maps::CPointsMap::load2Dor3D_from_text_file(), mrpt::maps::CLandmarksMap::loadOccupancyFeaturesFrom2DRangeScan(), mrpt::nav::CReactiveNavigationSystem3D::loggingGetWSObstaclesAndShape(), mrpt::hmtslam::CLSLAM_RBPF_2DLASER::prediction_and_update_pfOptimalProposal(), mrpt::vision::projectMatchedFeatures(), run_rnav_test(), mrpt::maps::CRandomFieldGridMap2D::setSize(), mrpt::nav::PlannerTPS_VirtualBase::transformPointcloudWithSquareClipping(), and mrpt::hmtslam::CLocalMetricHypothesis::updateAreaFromLMH().
◆ clone()
|
inlineinherited |
◆ compute3DMatchingRatio()
|
virtual |
See docs in base class: in this class this always returns 0.
Reimplemented from mrpt::maps::CMetricMap.
Definition at line 771 of file COccupancyGridMap2D_common.cpp.
References MRPT_UNUSED_PARAM.
◆ computeClearance() [1/2]
| int COccupancyGridMap2D::computeClearance | ( | int | cx, |
| int | cy, | ||
| int * | basis_x, | ||
| int * | basis_y, | ||
| int * | nBasis, | ||
| bool | GetContourPoint = false |
||
| ) | const |
Compute the clearance of a given cell, and returns its two first basis (closest obstacle) points.Used to build Voronoi and critical points.
- Returns
- The clearance of the cell, in 1/100 of "cell".
- Parameters
-
cx The cell index cy The cell index basis_x Target buffer for coordinates of basis, having a size of two "ints". basis_y Target buffer for coordinates of basis, having a size of two "ints". nBasis The number of found basis: Can be 0,1 or 2. GetContourPoint If "true" the basis are not returned, but the closest free cells.Default at false.
- See also
- Build_VoronoiDiagram
Definition at line 249 of file COccupancyGridMap2D_voronoi.cpp.
References M_2PI, M_PI, M_PIf, N_CIRCULOS, and mrpt::utils::round().
◆ computeClearance() [2/2]
| float COccupancyGridMap2D::computeClearance | ( | float | x, |
| float | y, | ||
| float | maxSearchDistance | ||
| ) | const |
An alternative method for computing the clearance of a given location (in meters).
- Returns
- The clearance (distance to closest OCCUPIED cell), in meters.
Definition at line 518 of file COccupancyGridMap2D_voronoi.cpp.
References min, and mrpt::math::square().
◆ computeEntropy()
| void COccupancyGridMap2D::computeEntropy | ( | TEntropyInfo & | info | ) | const |
Computes the entropy and related values of this grid map.
The entropy is computed as the summed entropy of each cell, taking them as discrete random variables following a Bernoulli distribution:
- Parameters
-
info The output information is returned here
Definition at line 355 of file COccupancyGridMap2D_common.cpp.
References entropyTable, H(), info, l2p(), map, MAX_H, and resolution.
◆ computeLikelihoodField_II()
| double COccupancyGridMap2D::computeLikelihoodField_II | ( | const CPointsMap * | pm, |
| const mrpt::poses::CPose2D * | relativePose = NULL |
||
| ) |
Computes the likelihood [0,1] of a set of points, given the current grid map as reference.
- Parameters
-
pm The points map relativePose The relative pose of the points map in this map's coordinates, or NULL for (0,0,0). See "likelihoodOptions" for configuration parameters.
Definition at line 683 of file COccupancyGridMap2D_likelihood.cpp.
References mrpt::maps::CPointsMap::getPoint(), min, MRPT_END, MRPT_START, mrpt::maps::CPointsMap::size(), mrpt::math::square(), mrpt::math::TPoint2D::x, and mrpt::math::TPoint2D::y.
◆ computeLikelihoodField_Thrun()
| double COccupancyGridMap2D::computeLikelihoodField_Thrun | ( | const CPointsMap * | pm, |
| const mrpt::poses::CPose2D * | relativePose = NULL |
||
| ) |
Computes the likelihood [0,1] of a set of points, given the current grid map as reference.
- Parameters
-
pm The points map relativePose The relative pose of the points map in this map's coordinates, or NULL for (0,0,0). See "likelihoodOptions" for configuration parameters.
Definition at line 499 of file COccupancyGridMap2D_likelihood.cpp.
References mrpt::maps::CPointsMap::getPoint(), mrpt::utils::keep_min(), LIK_LF_CACHE_INVALID, min, MRPT_END, MRPT_START, mrpt::poses::CPose2D::phi(), mrpt::utils::round(), mrpt::maps::CPointsMap::size(), mrpt::math::square(), mrpt::math::TPoint2D::x, mrpt::poses::CPoseOrPoint< DERIVEDCLASS >::x(), mrpt::math::TPoint2D::y, and mrpt::poses::CPoseOrPoint< DERIVEDCLASS >::y().
◆ computeObservationLikelihood() [1/2]
|
inherited |
Computes the log-likelihood of a given observation given an arbitrary robot 3D pose.
See: Maps and observations compatibility matrix
- Parameters
-
takenFrom The robot's pose the observation is supposed to be taken from. obs The observation.
- Returns
- This method returns a log-likelihood.
Definition at line 196 of file CMetricMap.cpp.
Referenced by mrpt::maps::CMultiMetricMapPDF::PF_SLAM_computeObservationLikelihoodForParticle().
◆ computeObservationLikelihood() [2/2]
|
inherited |
This is an overloaded member function, provided for convenience. It differs from the above function only in what argument(s) it accepts.
Definition at line 86 of file CMetricMap.cpp.
◆ computeObservationLikelihood_CellsDifference()
|
protected |
One of the methods that can be selected for implementing "computeObservationLikelihood".
Definition at line 234 of file COccupancyGridMap2D_likelihood.cpp.
References CLASS_ID, mrpt::obs::CObservation::GetRuntimeClass(), mrpt::obs::CObservation::insertObservationInto(), mrpt::obs::CObservation2DRangeScan::isPlanarScan(), min, mrpt::utils::round(), mrpt::poses::CPoseOrPoint< DERIVEDCLASS >::x(), and mrpt::poses::CPoseOrPoint< DERIVEDCLASS >::y().
◆ computeObservationLikelihood_Consensus()
|
protected |
One of the methods that can be selected for implementing "computeObservationLikelihood" (This method is the Range-Scan Likelihood Consensus for gridmaps, see the ICRA2007 paper by Blanco et al.)
Definition at line 87 of file COccupancyGridMap2D_likelihood.cpp.
References mrpt::obs::CObservation2DRangeScan::buildAuxPointsMap(), CLASS_ID, mrpt::poses::CPose2D::composePoint(), mrpt::maps::CPointsMap::getPoint(), mrpt::obs::CObservation::GetRuntimeClass(), mrpt::obs::CObservation2DRangeScan::isPlanarScan(), mrpt::maps::CPointsMap::size(), mrpt::math::TPoint2D::x, and mrpt::math::TPoint2D::y.
◆ computeObservationLikelihood_ConsensusOWA()
|
protected |
One of the methods that can be selected for implementing "computeObservationLikelihood".
TODO: This method is described in....
Definition at line 144 of file COccupancyGridMap2D_likelihood.cpp.
References ASSERT_, mrpt::obs::CObservation2DRangeScan::buildAuxPointsMap(), CLASS_ID, mrpt::poses::CPose2D::composePoint(), mrpt::maps::CPointsMap::getPoint(), mrpt::obs::CObservation::GetRuntimeClass(), mrpt::obs::CObservation2DRangeScan::isPlanarScan(), min, mrpt::maps::CPointsMap::TInsertionOptions::minDistBetweenLaserPoints, mrpt::math::TPoint2D::size(), mrpt::maps::CPointsMap::size(), mrpt::math::TPoint2D::x, and mrpt::math::TPoint2D::y.
◆ computeObservationLikelihood_likelihoodField_II()
|
protected |
One of the methods that can be selected for implementing "computeObservationLikelihood".
Definition at line 462 of file COccupancyGridMap2D_likelihood.cpp.
References mrpt::obs::CObservation2DRangeScan::buildAuxPointsMap(), CLASS_ID, mrpt::obs::CObservation::GetRuntimeClass(), mrpt::obs::CObservation2DRangeScan::isPlanarScan(), MRPT_END, and MRPT_START.
◆ computeObservationLikelihood_likelihoodField_Thrun()
|
protected |
One of the methods that can be selected for implementing "computeObservationLikelihood".
Definition at line 408 of file COccupancyGridMap2D_likelihood.cpp.
References mrpt::obs::CObservation2DRangeScan::buildAuxPointsMap(), mrpt::maps::CPointsMap::TInsertionOptions::horizontalTolerance, mrpt::maps::CPointsMap::insertionOptions, mrpt::maps::CMetricMap::insertObservation(), IS_CLASS, mrpt::maps::CPointsMap::TInsertionOptions::isPlanarMap, mrpt::obs::CObservation2DRangeScan::isPlanarScan(), mrpt::maps::CPointsMap::TInsertionOptions::minDistBetweenLaserPoints, MRPT_END, and MRPT_START.
◆ computeObservationLikelihood_MI()
|
protected |
One of the methods that can be selected for implementing "computeObservationLikelihood".
Definition at line 298 of file COccupancyGridMap2D_likelihood.cpp.
References MRPT_END, and MRPT_START.
◆ computeObservationLikelihood_rayTracing()
|
protected |
One of the methods that can be selected for implementing "computeObservationLikelihood".
Definition at line 337 of file COccupancyGridMap2D_likelihood.cpp.
References mrpt::obs::CObservation2DRangeScan::aperture, CLASS_ID, mrpt::obs::CObservation::GetRuntimeClass(), mrpt::obs::CObservation2DRangeScan::isPlanarScan(), mrpt::obs::CObservation2DRangeScan::maxRange, min, mrpt::obs::CObservation2DRangeScan::rightToLeft, mrpt::obs::CObservation2DRangeScan::scan, mrpt::obs::CObservation2DRangeScan::sensorPose, mrpt::utils::ContainerReadOnlyProxyAccessor< STLCONTAINER >::size(), mrpt::math::square(), and mrpt::obs::CObservation2DRangeScan::validRange.
◆ computeObservationsLikelihood()
|
inherited |
Returns the sum of the log-likelihoods of each individual observation within a mrpt::obs::CSensoryFrame.
See: Maps and observations compatibility matrix
- Parameters
-
takenFrom The robot's pose the observation is supposed to be taken from. sf The set of observations in a CSensoryFrame.
- Returns
- This method returns a log-likelihood.
- See also
- canComputeObservationsLikelihood
Definition at line 75 of file CMetricMap.cpp.
References mrpt::obs::CSensoryFrame::begin(), and mrpt::obs::CSensoryFrame::end().
Referenced by mrpt::hmtslam::CLSLAM_RBPF_2DLASER::auxiliarComputeObservationLikelihood().
◆ computePathCost()
| float COccupancyGridMap2D::computePathCost | ( | float | x1, |
| float | y1, | ||
| float | x2, | ||
| float | y2 | ||
| ) | const |
Compute the 'cost' of traversing a segment of the map according to the occupancy of traversed cells.
- Returns
- This returns '1-mean(traversed cells occupancy)', i.e. 0.5 for unknown cells, 1 for a free path.
Definition at line 752 of file COccupancyGridMap2D_common.cpp.
References getPos(), resolution, mrpt::utils::round(), and mrpt::math::square().
◆ copyMapContentFrom()
| void COccupancyGridMap2D::copyMapContentFrom | ( | const COccupancyGridMap2D & | otherMap | ) |
copy the gridmap contents, but not all the options, from another map instance
Definition at line 127 of file COccupancyGridMap2D_common.cpp.
References mrpt::utils::CDynamicGrid< T >::clear(), freeMap(), m_basis_map, m_is_empty, m_voronoi_diagram, map, precomputedLikelihoodToBeRecomputed, resolution, size_x, size_y, x_max, x_min, y_max, and y_min.
◆ Create()
|
static |
◆ CreateFromMapDefinition()
|
static |
Constructor from a map definition structure: initializes the map and its parameters accordingly.
Definition at line 29 of file COccupancyGridMap2D_common.cpp.
◆ CreateObject()
|
static |
◆ determineMatching2D()
|
virtual |
See the base class for more details: In this class it is implemented as correspondences of the passed points map to occupied cells.
NOTICE: That the "z" dimension is ignored in the points. Clip the points as appropiated if needed before calling this method.
- See also
- computeMatching3DWith
Reimplemented from mrpt::maps::CMetricMap.
Definition at line 539 of file COccupancyGridMap2D_common.cpp.
References ASSERT_, ASSERT_ABOVE_, ASSERT_BELOW_, CLASS_ID, mrpt::utils::TRuntimeClassId::derivedFrom(), mrpt::maps::CMetricMap::GetRuntimeClass(), idx2x(), idx2y(), map, min, MRPT_END, MRPT_START, mrpt::utils::TMatchingPair::other_idx, mrpt::utils::TMatchingPair::other_x, mrpt::utils::TMatchingPair::other_y, mrpt::utils::TMatchingPair::other_z, p2l(), mrpt::math::TPose2D::phi, resolution, mrpt::utils::round(), size_x, size_y, mrpt::math::square(), mrpt::utils::TMatchingPair::this_idx, mrpt::utils::TMatchingPair::this_x, mrpt::utils::TMatchingPair::this_y, mrpt::utils::TMatchingPair::this_z, mrpt::math::TPose2D::x, x2idx(), x_max, x_min, mrpt::math::TPose2D::y, y2idx(), y_max, and y_min.
◆ determineMatching3D()
|
virtualinherited |
Computes the matchings between this and another 3D points map - method used in 3D-ICP.
This method finds the set of point pairs in each map.
The method is the most time critical one into ICP-like algorithms.
The algorithm is:
- For each point in "otherMap":
- Transform the point according to otherMapPose
- Search with a KD-TREE the closest correspondences in "this" map.
- Add to the set of candidate matchings, if it passes all the thresholds in params.
- Parameters
-
otherMap [IN] The other map to compute the matching with. otherMapPose [IN] The pose of the other map as seen from "this". params [IN] Parameters for the determination of pairings. correspondences [OUT] The detected matchings pairs. extraResults [OUT] Other results.
- See also
- compute3DMatchingRatio
Reimplemented in mrpt::maps::CPointsMap.
Definition at line 150 of file CMetricMap.cpp.
References MRPT_END, MRPT_START, MRPT_UNUSED_PARAM, and THROW_EXCEPTION.
Referenced by mrpt::slam::CICP::ICP3D_Method_Classic().
◆ direction2idx()
|
private |
Returns the index [0,7] of the given movement, or -1 if invalid one.
Definition at line 483 of file COccupancyGridMap2D_voronoi.cpp.
◆ duplicate()
|
virtual |
Returns a copy of the object, indepently of its class.
Implements mrpt::utils::CObject.
◆ duplicateGetSmartPtr()
|
inlineinherited |
Returns a copy of the object, indepently of its class, as a smart pointer (the newly created object will exist as long as any copy of this smart pointer).
Definition at line 162 of file CObject.h.
References mrpt::utils::CObjectPtr.
Referenced by mrpt::obs::CRawlog::addActions(), mrpt::slam::CIncrementalMapPartitioner::addMapFrame(), and mrpt::obs::CRawlog::addObservations().
◆ fill()
| void COccupancyGridMap2D::fill | ( | float | default_value = 0.5f | ) |
Fills all the cells with a default value.
Definition at line 446 of file COccupancyGridMap2D_common.cpp.
References map, p2l(), and precomputedLikelihoodToBeRecomputed.
Referenced by run_rnav_test().
◆ findCriticalPoints()
| void COccupancyGridMap2D::findCriticalPoints | ( | float | filter_distance | ) |
Builds a list with the critical points from Voronoi diagram, which must must be built before calling this method.
- Parameters
-
filter_distance The minimum distance between two critical points.
- See also
- buildVoronoiDiagram
Definition at line 97 of file COccupancyGridMap2D_voronoi.cpp.
References ASSERT_EQUAL_, mrpt::utils::clear(), min, and mrpt::utils::round().
◆ freeMap()
|
protected |
Frees the dynamic memory buffers of map.
Definition at line 326 of file COccupancyGridMap2D_common.cpp.
References mrpt::utils::CDynamicGrid< T >::clear(), m_basis_map, m_is_empty, m_voronoi_diagram, map, MRPT_END, MRPT_START, precomputedLikelihoodToBeRecomputed, size_x, and size_y.
Referenced by copyMapContentFrom(), setSize(), and ~COccupancyGridMap2D().
◆ getArea()
|
inline |
Returns the area of the gridmap, in square meters.
Definition at line 215 of file maps/COccupancyGridMap2D.h.
References mrpt::mrpt::math::square().
Referenced by mrpt::slam::CGridMapAligner::AlignPDF_robustMatch().
◆ getAs3DObject()
|
virtual |
Returns a 3D plane with its texture being the occupancy grid and transparency proportional to "uncertainty" (i.e.
a value of 0.5 is fully transparent)
Implements mrpt::maps::CMetricMap.
Definition at line 155 of file COccupancyGridMap2D_getAs.cpp.
References mrpt::opengl::CTexturedPlane::Create(), MRPT_END, and MRPT_START.
◆ getAsImage()
| void COccupancyGridMap2D::getAsImage | ( | utils::CImage & | img, |
| bool | verticalFlip = false, |
||
| bool | forceRGB = false, |
||
| bool | tricolor = false |
||
| ) | const |
Returns the grid as a 8-bit graylevel image, where each pixel is a cell (output image is RGB only if forceRGB is true) If "tricolor" is true, only three gray levels will appear in the image: gray for unobserved cells, and black/white for occupied/empty cells respectively.
- See also
- getAsImageFiltered
Definition at line 31 of file COccupancyGridMap2D_getAs.cpp.
Referenced by mrpt::slam::CGridMapAligner::AlignPDF_correlation(), saveAsBitmapTwoMapsWithCorrespondences(), and saveAsEMFTwoMapsWithCorrespondences().
◆ getAsImageFiltered()
| void COccupancyGridMap2D::getAsImageFiltered | ( | utils::CImage & | img, |
| bool | verticalFlip = false, |
||
| bool | forceRGB = false |
||
| ) | const |
Returns the grid as a 8-bit graylevel image, where each pixel is a cell (output image is RGB only if forceRGB is true) - This method filters the image for easy feature detection If "tricolor" is true, only three gray levels will appear in the image: gray for unobserved cells, and black/white for occupied/empty cells respectively.
- See also
- getAsImage
Definition at line 131 of file COccupancyGridMap2D_getAs.cpp.
References mrpt::utils::round().
Referenced by mrpt::slam::COccupancyGridMapFeatureExtractor::uncached_extractFeatures().
◆ getAsPointCloud()
| void COccupancyGridMap2D::getAsPointCloud | ( | mrpt::maps::CSimplePointsMap & | pm, |
| const float | occup_threshold = 0.5f |
||
| ) | const |
Get a point cloud with all (border) occupied cells as points.
Definition at line 197 of file COccupancyGridMap2D_getAs.cpp.
References mrpt::maps::CMetricMap::clear(), mrpt::maps::CPointsMap::insertPoint(), and mrpt::maps::CSimplePointsMap::reserve().
◆ getAsSimplePointsMap() [1/2]
|
inlinevirtualinherited |
If the map is a simple points map or it's a multi-metric map that contains EXACTLY one simple points map, return it.
Otherwise, return NULL
Reimplemented in mrpt::maps::CPointsMap, mrpt::maps::CMultiMetricMap, and mrpt::maps::CSimplePointsMap.
Definition at line 240 of file maps/CMetricMap.h.
Referenced by mrpt::maps::CPointsMap::compute3DMatchingRatio().
◆ getAsSimplePointsMap() [2/2]
|
inlinevirtualinherited |
Reimplemented in mrpt::maps::CPointsMap, mrpt::maps::CMultiMetricMap, and mrpt::maps::CSimplePointsMap.
Definition at line 241 of file maps/CMetricMap.h.
◆ getBasisCell()
|
inline |
Reads a cell in the "basis" maps.Used for Voronoi calculation.
Definition at line 314 of file maps/COccupancyGridMap2D.h.
References ASSERT_ABOVEEQ_, ASSERT_BELOWEQ_, mrpt::utils::CDynamicGrid< T >::cellByIndex(), mrpt::utils::CDynamicGrid< T >::getSizeX(), and mrpt::utils::CDynamicGrid< T >::getSizeY().
◆ getBasisMap()
|
inline |
Return the auxiliary "basis" map built while building the Voronoi diagram.
- See also
- buildVoronoiDiagram
Definition at line 498 of file maps/COccupancyGridMap2D.h.
◆ getCell()
|
inline |
Read the real valued [0,1] contents of a cell, given its index.
Definition at line 276 of file maps/COccupancyGridMap2D.h.
Referenced by mrpt::nav::PlannerSimple2D::computePath(), mrpt::maps::CRandomFieldGridMap2D::exist_relation_between2cells(), mrpt::maps::CRandomFieldGridMap2D::internal_clear(), mrpt::slam::CMonteCarloLocalization2D::resetUniformFreeSpace(), and subSample().
◆ getCell_nocheck()
|
inlineprotected |
Read the real valued [0,1] contents of a cell, given its index.
Definition at line 130 of file maps/COccupancyGridMap2D.h.
◆ GetNeighborhood()
|
inlineprivate |
Returns a byte with the occupancy of the 8 sorrounding cells.
- Parameters
-
cx The cell index cy The cell index
- See also
- direction2idx
Definition at line 461 of file COccupancyGridMap2D_voronoi.cpp.
◆ getPos()
|
inline |
Read the real valued [0,1] contents of a cell, given its coordinates.
Definition at line 294 of file maps/COccupancyGridMap2D.h.
Referenced by mrpt::slam::CGridMapAligner::AlignPDF_correlation(), computePathCost(), and TEST().
◆ getRawMap()
|
inline |
Read-only access to the raw cell contents (cells are in log-odd units)
Definition at line 169 of file maps/COccupancyGridMap2D.h.
◆ getResolution()
|
inline |
Returns the resolution of the grid map.
Definition at line 236 of file maps/COccupancyGridMap2D.h.
Referenced by mrpt::slam::CGridMapAligner::AlignPDF_correlation(), mrpt::slam::CGridMapAligner::AlignPDF_robustMatch(), mrpt::nav::PlannerSimple2D::computePath(), internal_clear(), mrpt::maps::CRandomFieldGridMap2D::internal_clear(), mrpt::slam::CMonteCarloLocalization2D::resetUniformFreeSpace(), and mrpt::slam::COccupancyGridMapFeatureExtractor::uncached_extractFeatures().
◆ getRow() [1/2]
|
inline |
Access to a "row": mainly used for drawing grid as a bitmap efficiently, do not use it normally.
Definition at line 285 of file maps/COccupancyGridMap2D.h.
Referenced by mrpt::slam::CGridMapAligner::AlignPDF_correlation().
◆ getRow() [2/2]
|
inline |
Access to a "row": mainly used for drawing grid as a bitmap efficiently, do not use it normally.
Definition at line 288 of file maps/COccupancyGridMap2D.h.
◆ GetRuntimeClass()
|
virtual |
Returns information about the class of an object in runtime.
Reimplemented from mrpt::maps::CMetricMap.
◆ getSizeX()
|
inline |
Returns the horizontal size of grid map in cells count.
Definition at line 218 of file maps/COccupancyGridMap2D.h.
Referenced by mrpt::slam::CGridMapAligner::AlignPDF_correlation(), mrpt::slam::CGridMapAligner::AlignPDF_robustMatch(), mrpt::nav::PlannerSimple2D::computePath(), mrpt::maps::CRandomFieldGridMap2D::exist_relation_between2cells(), mrpt::maps::CRandomFieldGridMap2D::internal_clear(), and mrpt::slam::CMonteCarloLocalization2D::resetUniformFreeSpace().
◆ getSizeY()
|
inline |
Returns the vertical size of grid map in cells count.
Definition at line 221 of file maps/COccupancyGridMap2D.h.
Referenced by mrpt::slam::CGridMapAligner::AlignPDF_correlation(), mrpt::slam::CGridMapAligner::AlignPDF_robustMatch(), mrpt::nav::PlannerSimple2D::computePath(), mrpt::maps::CRandomFieldGridMap2D::exist_relation_between2cells(), mrpt::maps::CRandomFieldGridMap2D::internal_clear(), and mrpt::slam::CMonteCarloLocalization2D::resetUniformFreeSpace().
◆ getVoroniClearance()
|
inline |
Reads a the clearance of a cell (in centimeters), after building the Voronoi diagram with buildVoronoiDiagram.
Definition at line 469 of file maps/COccupancyGridMap2D.h.
References ASSERT_ABOVEEQ_, ASSERT_BELOWEQ_, mrpt::utils::CDynamicGrid< T >::cellByIndex(), mrpt::utils::CDynamicGrid< T >::getSizeX(), and mrpt::utils::CDynamicGrid< T >::getSizeY().
◆ getVoronoiDiagram()
|
inline |
Return the Voronoi diagram; each cell contains the distance to its closer obstacle, or 0 if not part of the Voronoi diagram.
- See also
- buildVoronoiDiagram
Definition at line 501 of file maps/COccupancyGridMap2D.h.
◆ getXMax()
|
inline |
Returns the "x" coordinate of right side of grid map.
Definition at line 227 of file maps/COccupancyGridMap2D.h.
Referenced by mrpt::slam::CGridMapAligner::AlignPDF_correlation(), mrpt::nav::PlannerSimple2D::computePath(), and mrpt::maps::CRandomFieldGridMap2D::internal_clear().
◆ getXMin()
|
inline |
Returns the "x" coordinate of left side of grid map.
Definition at line 224 of file maps/COccupancyGridMap2D.h.
Referenced by mrpt::slam::CGridMapAligner::AlignPDF_correlation(), mrpt::nav::PlannerSimple2D::computePath(), mrpt::maps::CRandomFieldGridMap2D::internal_clear(), mrpt::slam::CMonteCarloLocalization2D::resetUniformFreeSpace(), and mrpt::slam::COccupancyGridMapFeatureExtractor::uncached_extractFeatures().
◆ getYMax()
|
inline |
Returns the "y" coordinate of bottom side of grid map.
Definition at line 233 of file maps/COccupancyGridMap2D.h.
Referenced by mrpt::nav::PlannerSimple2D::computePath(), and mrpt::maps::CRandomFieldGridMap2D::internal_clear().
◆ getYMin()
|
inline |
Returns the "y" coordinate of top side of grid map.
Definition at line 230 of file maps/COccupancyGridMap2D.h.
Referenced by mrpt::nav::PlannerSimple2D::computePath(), mrpt::maps::CRandomFieldGridMap2D::internal_clear(), mrpt::slam::CMonteCarloLocalization2D::resetUniformFreeSpace(), and mrpt::slam::COccupancyGridMapFeatureExtractor::uncached_extractFeatures().
◆ H()
|
staticprotected |
Entropy computation internal function:
Definition at line 425 of file COccupancyGridMap2D_common.cpp.
Referenced by computeEntropy(), and updateCell().
◆ hasSubscribers()
|
inlineprotectedinherited |
Can be called by a derived class before preparing an event for publishing with publishEvent to determine if there is no one subscribed, so it can save the wasted time preparing an event that will be not read.
Definition at line 52 of file CObservable.h.
Referenced by mrpt::gui::CWindowDialog::OnMouseDown(), mrpt::gui::CWindowDialog::OnMouseMove(), mrpt::gui::CWindowDialog::OnResize(), and mrpt::opengl::COpenGLViewport::render().
◆ idx2x()
|
inline |
Transform a cell index into a coordinate value.
Definition at line 246 of file maps/COccupancyGridMap2D.h.
Referenced by mrpt::slam::CGridMapAligner::AlignPDF_correlation(), mrpt::nav::PlannerSimple2D::computePath(), determineMatching2D(), and mrpt::slam::CMonteCarloLocalization2D::resetUniformFreeSpace().
◆ idx2y()
|
inline |
Definition at line 247 of file maps/COccupancyGridMap2D.h.
Referenced by mrpt::slam::CGridMapAligner::AlignPDF_correlation(), mrpt::nav::PlannerSimple2D::computePath(), determineMatching2D(), and mrpt::slam::CMonteCarloLocalization2D::resetUniformFreeSpace().
◆ insertObservation()
|
inherited |
Insert the observation information into this map.
This method must be implemented in derived classes. See: Maps and observations compatibility matrix
- Parameters
-
obs The observation robotPose The 3D pose of the robot mobile base in the map reference system, or NULL (default) if you want to use the origin.
- See also
- CObservation::insertObservationInto
Definition at line 102 of file CMetricMap.cpp.
Referenced by ICPTests::align2scans(), computeObservationLikelihood_likelihoodField_Thrun(), mrpt::graphslam::deciders::CRangeScanOps< GRAPH_T >::getICPEdge(), CAngularObservationMesh_fnctr::operator()(), TEST(), and mrpt::graphslam::CGraphSlamEngine< GRAPH_T >::updateMapVisualization().
◆ insertObservationPtr()
|
inherited |
A wrapper for smart pointers, just calls the non-smart pointer version.
See: Maps and observations compatibility matrix
Definition at line 118 of file CMetricMap.cpp.
References MRPT_END, MRPT_START, and THROW_EXCEPTION.
Referenced by mrpt::slam::CMetricMapBuilderICP::processObservation().
◆ internal_canComputeObservationLikelihood()
|
privatevirtual |
Returns true if this map is able to compute a sensible likelihood function for this observation (i.e.
an occupancy grid map cannot with an image).
- Parameters
-
obs The observation.
- See also
- computeObservationLikelihood
Reimplemented from mrpt::maps::CMetricMap.
Definition at line 897 of file COccupancyGridMap2D_likelihood.cpp.
References CLASS_ID, mrpt::obs::CObservation::GetRuntimeClass(), mrpt::maps::COccupancyGridMap2D::TInsertionOptions::horizontalTolerance, insertionOptions, mrpt::obs::CObservation2DRangeScan::isPlanarScan(), mrpt::maps::COccupancyGridMap2D::TInsertionOptions::mapAltitude, mrpt::obs::CObservation2DRangeScan::sensorPose, and mrpt::maps::COccupancyGridMap2D::TInsertionOptions::useMapAltitude.
◆ internal_clear()
|
protectedvirtual |
Clear the map: It set all cells to their default occupancy value (0.5), without changing the resolution (the grid extension is reset to the default values).
Implements mrpt::maps::CMetricMap.
Definition at line 435 of file COccupancyGridMap2D_common.cpp.
References getResolution(), precomputedLikelihoodToBeRecomputed, and setSize().
◆ internal_computeObservationLikelihood()
|
privatevirtual |
Internal method called by computeObservationLikelihood()
Implements mrpt::maps::CMetricMap.
Definition at line 35 of file COccupancyGridMap2D_likelihood.cpp.
References CLASS_ID, mrpt::obs::CObservation::GetRuntimeClass(), mrpt::obs::CObservation2DRangeScan::isPlanarScan(), and mrpt::obs::CObservation2DRangeScan::sensorPose.
◆ internal_CreateFromMapDefinition()
|
static |
Definition at line 70 of file COccupancyGridMap2D_common.cpp.
References mrpt::maps::COccupancyGridMap2D::TMapDefinition::insertionOpts, mrpt::maps::COccupancyGridMap2D::TMapDefinition::likelihoodOpts, mrpt::maps::COccupancyGridMap2D::TMapDefinition::max_x, mrpt::maps::COccupancyGridMap2D::TMapDefinition::max_y, mrpt::maps::COccupancyGridMap2D::TMapDefinition::min_x, mrpt::maps::COccupancyGridMap2D::TMapDefinition::min_y, and mrpt::maps::COccupancyGridMap2D::TMapDefinition::resolution.
◆ internal_insertObservation()
|
protectedvirtual |
Insert the observation information into this map.
- Parameters
-
obs The observation robotPose The 3D pose of the robot mobile base in the map reference system, or NULL (default) if you want to use CPose2D(0,0,deg)
After successfull execution, "lastObservationInsertionInfo" is updated.
- See also
- insertionOptions, CObservation::insertObservationInto
Implements mrpt::maps::CMetricMap.
Definition at line 40 of file COccupancyGridMap2D_insert.cpp.
References mrpt::obs::CObservation2DRangeScan::aperture, ASSERT_, CLASS_ID, TLocalPoint::cx, TLocalPoint::cy, FRBITS, mrpt::poses::CPose3D::getHomogeneousMatrixVal(), mrpt::obs::CObservation::GetRuntimeClass(), mrpt::obs::CObservationRange::getSensorPose(), mrpt::obs::CObservation2DRangeScan::isPlanarScan(), mrpt::utils::max3(), min, mrpt::utils::min3(), mrpt_alloca, mrpt_alloca_free, MRPT_CHECK_NORMAL_NUMBER, mrpt::poses::CPose2D::phi(), R, mrpt::obs::CObservation2DRangeScan::rightToLeft, mrpt::utils::round(), mrpt::obs::CObservation2DRangeScan::scan, mrpt::obs::CObservationRange::sensedData, mrpt::obs::CObservationRange::sensorConeApperture, mrpt::obs::CObservation2DRangeScan::sensorPose, mrpt::utils::ContainerReadOnlyProxyAccessor< STLCONTAINER >::size(), mrpt::obs::CObservation2DRangeScan::validRange, TLocalPoint::x, mrpt::poses::CPoseOrPoint< DERIVEDCLASS >::x(), TLocalPoint::y, and mrpt::poses::CPoseOrPoint< DERIVEDCLASS >::y().
◆ isEmpty()
|
virtual |
Returns true upon map construction or after calling clear(), the return changes to false upon successful insertObservation() or any other method to load data in the map.
Implements mrpt::maps::CMetricMap.
Definition at line 733 of file COccupancyGridMap2D_common.cpp.
References m_is_empty.
◆ isStaticCell()
|
inline |
Definition at line 298 of file maps/COccupancyGridMap2D.h.
◆ isStaticPos()
|
inline |
Returns "true" if cell is "static", i.e.if its occupancy is below a given threshold.
Definition at line 297 of file maps/COccupancyGridMap2D.h.
◆ l2p()
|
inlinestatic |
Scales an integer representation of the log-odd into a real valued probability in [0,1], using p=exp(l)/(1+exp(l))
Definition at line 254 of file maps/COccupancyGridMap2D.h.
References mrpt::maps::CLogOddsGridMapLUT< TCELL >::l2p().
Referenced by computeEntropy(), and updateCell().
◆ l2p_255()
Scales an integer representation of the log-odd into a linear scale [0,255], using p=exp(l)/(1+exp(l))
Definition at line 258 of file maps/COccupancyGridMap2D.h.
References mrpt::maps::CLogOddsGridMapLUT< TCELL >::l2p_255().
◆ laserScanSimulator()
| void COccupancyGridMap2D::laserScanSimulator | ( | mrpt::obs::CObservation2DRangeScan & | inout_Scan, |
| const mrpt::poses::CPose2D & | robotPose, | ||
| float | threshold = 0.6f, |
||
| size_t | N = 361, |
||
| float | noiseStd = 0, |
||
| unsigned int | decimation = 1, |
||
| float | angleNoiseStd = mrpt::utils::DEG2RAD(0) |
||
| ) | const |
Simulates a laser range scan into the current grid map.
The simulated scan is stored in a CObservation2DRangeScan object, which is also used to pass some parameters: all previously stored characteristics (as aperture,...) are taken into account for simulation. Only a few more parameters are needed. Additive gaussian noise can be optionally added to the simulated scan.
- Parameters
-
inout_Scan [IN/OUT] This must be filled with desired parameters before calling, and will contain the scan samples on return. robotPose [IN] The robot pose in this map coordinates. Recall that sensor pose relative to this robot pose must be specified in the observation object. threshold [IN] The minimum occupancy threshold to consider a cell to be occupied (Default: 0.5f) N [IN] The count of range scan "rays", by default to 361. noiseStd [IN] The standard deviation of measurement noise. If not desired, set to 0. decimation [IN] The rays that will be simulated are at indexes: 0, D, 2D, 3D, ... Default is D=1 angleNoiseStd [IN] The sigma of an optional Gaussian noise added to the angles at which ranges are measured (in radians).
- See also
- laserScanSimulatorWithUncertainty(), sonarSimulator(), COccupancyGridMap2D::RAYTRACE_STEP_SIZE_IN_CELL_UNITS
Definition at line 31 of file COccupancyGridMap2D_simulate.cpp.
References mrpt::obs::CObservation2DRangeScan::aperture, ASSERT_, mrpt::obs::CObservation2DRangeScan::maxRange, MRPT_END, MRPT_START, mrpt::poses::CPose2D::phi(), mrpt::obs::CObservation2DRangeScan::resizeScan(), mrpt::obs::CObservation2DRangeScan::rightToLeft, mrpt::obs::CObservation2DRangeScan::sensorPose, mrpt::obs::CObservation2DRangeScan::setScanRange(), mrpt::obs::CObservation2DRangeScan::setScanRangeValidity(), mrpt::poses::CPoseOrPoint< DERIVEDCLASS >::x(), and mrpt::poses::CPoseOrPoint< DERIVEDCLASS >::y().
Referenced by run_rnav_test().
◆ laserScanSimulatorWithUncertainty()
| void COccupancyGridMap2D::laserScanSimulatorWithUncertainty | ( | const TLaserSimulUncertaintyParams & | in_params, |
| COccupancyGridMap2D::TLaserSimulUncertaintyResult & | out_results | ||
| ) | const |
Like laserScanSimulatorWithUncertainty() (see it for a discussion of most parameters) but taking into account the robot pose uncertainty and generating a vector of predicted variances for each ray.
Range uncertainty includes both, sensor noise and large non-linear effects caused by borders and discontinuities in the environment as seen from different robot poses.
- Parameters
-
in_params [IN] Input settings. See TLaserSimulUncertaintyParams in_params [OUT] Output range + uncertainty.
Definition at line 238 of file COccupancyGridMap2D_simulate.cpp.
References mrpt::obs::CObservation2DRangeScan::aperture, mrpt::maps::COccupancyGridMap2D::TLaserSimulUncertaintyParams::aperture, mrpt::poses::CPosePDFGaussian::cov, func_laserSimul_callback(), mrpt::poses::CPoseOrPoint< DERIVEDCLASS >::getAsVectorVal(), TFunctorLaserSimulData::grid, mrpt::obs::CObservation2DRangeScan::maxRange, mrpt::maps::COccupancyGridMap2D::TLaserSimulUncertaintyParams::maxRange, mrpt::maps::COccupancyGridMap2D::TLaserSimulUncertaintyParams::MC_samples, mrpt::poses::CPosePDFGaussian::mean, mrpt::maps::COccupancyGridMap2D::TLaserSimulUncertaintyParams::method, mrpt::maps::COccupancyGridMap2D::TLaserSimulUncertaintyParams::nRays, TFunctorLaserSimulData::params, mrpt::obs::CObservation2DRangeScanWithUncertainty::rangeScan, mrpt::obs::CObservation2DRangeScanWithUncertainty::rangesCovar, mrpt::obs::CObservation2DRangeScanWithUncertainty::rangesMean, mrpt::obs::CObservation2DRangeScan::resizeScan(), resolution, mrpt::obs::CObservation2DRangeScan::rightToLeft, mrpt::maps::COccupancyGridMap2D::TLaserSimulUncertaintyParams::rightToLeft, mrpt::maps::COccupancyGridMap2D::TLaserSimulUncertaintyParams::robotPose, mrpt::maps::COccupancyGridMap2D::TLaserSimulUncertaintyResult::scanWithUncert, mrpt::obs::CObservation2DRangeScan::sensorPose, mrpt::maps::COccupancyGridMap2D::TLaserSimulUncertaintyParams::sensorPose, mrpt::obs::CObservation2DRangeScan::setScanRange(), mrpt::obs::CObservation2DRangeScan::setScanRangeValidity(), sumMonteCarlo, sumUnscented, mrpt::math::transform_gaussian_montecarlo(), mrpt::math::transform_gaussian_unscented(), mrpt::maps::COccupancyGridMap2D::TLaserSimulUncertaintyParams::UT_alpha, mrpt::maps::COccupancyGridMap2D::TLaserSimulUncertaintyParams::UT_beta, and mrpt::maps::COccupancyGridMap2D::TLaserSimulUncertaintyParams::UT_kappa.
◆ loadFromBitmap()
| bool COccupancyGridMap2D::loadFromBitmap | ( | const mrpt::utils::CImage & | img, |
| float | resolution, | ||
| float | origin_xPixel = std::numeric_limits<float>::max(), |
||
| float | origin_yPixel = std::numeric_limits<float>::max() |
||
| ) |
Load the gridmap from a image in a file (the format can be any supported by CImage::loadFromFile).
See loadFromBitmapFile() for the meaning of parameters
Definition at line 307 of file COccupancyGridMap2D_io.cpp.
References mrpt::utils::CImage::getAsFloat(), mrpt::utils::CImage::getHeight(), mrpt::utils::CImage::getWidth(), min, MRPT_END, MRPT_START, and setSize().
◆ loadFromBitmapFile()
| bool COccupancyGridMap2D::loadFromBitmapFile | ( | const std::string & | file, |
| float | resolution, | ||
| float | origin_xPixel = std::numeric_limits<float>::max(), |
||
| float | origin_yPixel = std::numeric_limits<float>::max() |
||
| ) |
Load the gridmap from a image in a file (the format can be any supported by CImage::loadFromFile).
- Parameters
-
file The file to be loaded. resolution The size of a pixel (cell), in meters. Recall cells are always squared, so just a dimension is needed. origin_xPixel The xcoordinate (0=first, increases left to right on the image) for the pixel which will be taken at coordinates origin (0,0). (Default: the center of the image)origin_yPixel The ycoordinate (0=first, increases BOTTOM upwards on the image) for the pixel which will be taken at coordinates origin (0,0). (Default: the center of the image)
- Returns
- False on any error.
- See also
- loadFromBitmap
Definition at line 286 of file COccupancyGridMap2D_io.cpp.
References MRPT_END, and MRPT_START.
Referenced by mrpt::maps::CRandomFieldGridMap2D::internal_clear().
◆ loadFromProbabilisticPosesAndObservations()
|
inherited |
Load the map contents from a CSimpleMap object, erasing all previous content of the map.
This is automaticed invoking "insertObservation" for each observation at the mean 3D robot pose as given by the "poses::CPosePDF" in the CSimpleMap object.
- See also
- insertObservation, CSimpleMap
- Exceptions
-
std::exception Some internal steps in invoked methods can raise exceptions on invalid parameters, etc...
Definition at line 48 of file CMetricMap.cpp.
References mrpt::utils::clear(), mrpt::maps::CSimpleMap::get(), and mrpt::maps::CSimpleMap::size().
Referenced by run_test_pf_localization().
◆ loadFromSimpleMap()
|
inlineinherited |
Load the map contents from a CSimpleMap object, erasing all previous content of the map.
This is automaticed invoking "insertObservation" for each observation at the mean 3D robot pose as given by the "poses::CPosePDF" in the CSimpleMap object.
- See also
- insertObservation, CSimpleMap
- Exceptions
-
std::exception Some internal steps in invoked methods can raise exceptions on invalid parameters, etc...
Definition at line 105 of file maps/CMetricMap.h.
Referenced by mrpt::maps::CRandomFieldGridMap2D::internal_clear().
◆ MapDefinition()
|
static |
Returns default map definition initializer.
See mrpt::maps::TMetricMapInitializer
Definition at line 29 of file COccupancyGridMap2D_common.cpp.
◆ OnPostSuccesfulInsertObs()
|
protectedvirtual |
See base class.
Reimplemented from mrpt::maps::CMetricMap.
Definition at line 1205 of file COccupancyGridMap2D_insert.cpp.
References m_is_empty.
◆ operator delete() [1/3]
Definition at line 72 of file maps/COccupancyGridMap2D.h.
◆ operator delete() [2/3]
|
inline | ||||||||||||||||||||
Definition at line 72 of file maps/COccupancyGridMap2D.h.
◆ operator delete() [3/3]
|
inline | ||||||||||||||||||||
Definition at line 72 of file maps/COccupancyGridMap2D.h.
◆ operator delete[]()
Definition at line 72 of file maps/COccupancyGridMap2D.h.
◆ operator new() [1/3]
|
inline |
Definition at line 72 of file maps/COccupancyGridMap2D.h.
◆ operator new() [2/3]
|
inline | ||||||||||||||||||||
Definition at line 72 of file maps/COccupancyGridMap2D.h.
◆ operator new() [3/3]
Definition at line 72 of file maps/COccupancyGridMap2D.h.
◆ operator new[]()
|
inline |
Definition at line 72 of file maps/COccupancyGridMap2D.h.
◆ p2l()
|
inlinestatic |
Scales a real valued probability in [0,1] to an integer representation of: log(p)-log(1-p) in the valid range of cellType.
Definition at line 262 of file maps/COccupancyGridMap2D.h.
References mrpt::maps::CLogOddsGridMapLUT< TCELL >::p2l().
Referenced by mrpt::slam::CGridMapAligner::AlignPDF_correlation(), determineMatching2D(), fill(), setSize(), subSample(), and updateCell().
◆ publishEvent()
Called when you want this object to emit an event to all the observers currently subscribed to this object.
Definition at line 49 of file CObservable.cpp.
References MRPT_END, and MRPT_START.
Referenced by mrpt::gui::CDisplayWindow3D::internal_emitGrabImageEvent(), mrpt::gui::CWindowDialog::OnChar(), mrpt::gui::CWindowDialog::OnClose(), mrpt::gui::C3DWindowDialog::OnClose(), mrpt::gui::CWindowDialog::OnMouseDown(), mrpt::gui::CWindowDialog::OnMouseMove(), mrpt::gui::CWindowDialog::OnResize(), mrpt::gui::C3DWindowDialog::OnResize(), and mrpt::opengl::COpenGLViewport::render().
◆ readFromStream()
|
protectedvirtual |
Introduces a pure virtual method responsible for loading from a CStream This can not be used directly be users, instead use "stream >> object;" for reading it from a stream or "stream >> object_ptr;" if the class is unknown apriori.
- Parameters
-
in The input binary stream where the object data must read from. version The version of the object stored in the stream: use this version number in your code to know how to read the incoming data.
- Exceptions
-
std::exception On any error, see CStream::ReadBuffer
- See also
- CStream
Implements mrpt::utils::CSerializable.
Definition at line 123 of file COccupancyGridMap2D_io.cpp.
References ASSERT_, MRPT_THROW_UNKNOWN_SERIALIZATION_VERSION, setSize(), and version.
◆ resizeGrid()
| void COccupancyGridMap2D::resizeGrid | ( | float | new_x_min, |
| float | new_x_max, | ||
| float | new_y_min, | ||
| float | new_y_max, | ||
| float | new_cells_default_value = 0.5f, |
||
| bool | additionalMargin = true |
||
| ) |
Change the size of gridmap, maintaining previous contents.
- Parameters
-
new_x_min The "x" coordinates of new left most side of grid. new_x_max The "x" coordinates of new right most side of grid. new_y_min The "y" coordinates of new top most side of grid. new_y_max The "y" coordinates of new bottom most side of grid. new_cells_default_value The value of the new cells, tipically 0.5. additionalMargin If set to true (default), an additional margin of a few meters will be added to the grid, ONLY if the new coordinates are larger than current ones.
- See also
- setSize
Definition at line 212 of file COccupancyGridMap2D_common.cpp.
References mrpt::system::os::memcpy(), min, and mrpt::utils::round().
◆ saveAsBitmapFile()
| bool COccupancyGridMap2D::saveAsBitmapFile | ( | const std::string & | file | ) | const |
Saves the gridmap as a graphical file (BMP,PNG,...).
The format will be derived from the file extension (see CImage::saveToFile )
- Returns
- False on any error.
Definition at line 34 of file COccupancyGridMap2D_io.cpp.
References MRPT_END, and MRPT_START.
Referenced by mrpt::maps::CRandomFieldGridMap2D::internal_clear().
◆ saveAsBitmapFileWithLandmarks()
|
inline |
Saves the gridmap as a graphical bitmap file, 8 bit gray scale, 1 pixel is 1 cell, and with an overlay of landmarks.
- Note
- The template parameter CLANDMARKSMAP is assumed to be mrpt::maps::CLandmarksMap normally.
- Returns
- False on any error.
Definition at line 690 of file maps/COccupancyGridMap2D.h.
References mrpt::format(), MRPT_END, and MRPT_START.
◆ saveAsBitmapTwoMapsWithCorrespondences()
|
static |
Saves a composite image with two gridmaps and lines representing a set of correspondences between them.
- Returns
- False on any error.
Definition at line 357 of file COccupancyGridMap2D_io.cpp.
References mrpt::random::CRandomGenerator::drawUniform(), getAsImage(), MRPT_END, MRPT_START, mrpt::random::randomGenerator, x2idx(), and y2idx().
◆ saveAsEMFTwoMapsWithCorrespondences()
|
static |
Saves a composite image with two gridmaps and numbers for the correspondences between them.
- Returns
- False on any error.
/
Draw the correspondences as lines:
for (i=0;i<n;i++) { lineColor = ((unsigned long)RandomUni(0,255.0f)) + (((unsigned long)RandomUni(0,255.0f)) << 8 ) + (((unsigned long)RandomUni(0,255.0f)) << 16 );
emf.line( m1->x2idx( corrs[i].this_x ), Ay1+ly1-1- m1->y2idx( corrs[i].this_y ), lx1+1+ m2->x2idx( corrs[i].other_x ), Ay2+ly2-1-m2->y2idx( corrs[i].other_y ), lineColor); } // i /
Definition at line 445 of file COccupancyGridMap2D_io.cpp.
References getAsImage(), mrpt::utils::CImage::getHeight(), mrpt::utils::CImage::getWidth(), MRPT_END, MRPT_START, red, mrpt::system::os::sprintf(), x2idx(), and y2idx().
◆ saveMetricMapRepresentationToFile()
|
virtual |
This virtual method saves the map to a file "filNamePrefix"+< some_file_extension >, as an image or in any other applicable way (Notice that other methods to save the map may be implemented in classes implementing this virtual interface).
Implements mrpt::maps::CMetricMap.
Definition at line 559 of file COccupancyGridMap2D_io.cpp.
References mrpt::math::MATRIX_FORMAT_FIXED.
Referenced by mrpt::slam::COccupancyGridMapFeatureExtractor::uncached_extractFeatures().
◆ setBasisCell()
Change a cell in the "basis" maps.Used for Voronoi calculation.
Definition at line 301 of file maps/COccupancyGridMap2D.h.
References ASSERT_ABOVEEQ_, ASSERT_BELOWEQ_, mrpt::utils::CDynamicGrid< T >::cellByIndex(), mrpt::utils::CDynamicGrid< T >::getSizeX(), and mrpt::utils::CDynamicGrid< T >::getSizeY().
◆ setCell()
|
inline |
Change the contents [0,1] of a cell, given its index.
Definition at line 267 of file maps/COccupancyGridMap2D.h.
Referenced by run_rnav_test().
◆ setCell_nocheck()
|
inlineprotected |
Change the contents [0,1] of a cell, given its index.
Definition at line 125 of file maps/COccupancyGridMap2D.h.
◆ setPos()
|
inline |
Change the contents [0,1] of a cell, given its coordinates.
Definition at line 291 of file maps/COccupancyGridMap2D.h.
◆ setRawCell()
|
inlineprotected |
Changes a cell by its absolute index (Do not use it normally)
Definition at line 134 of file maps/COccupancyGridMap2D.h.
◆ setSize()
| void COccupancyGridMap2D::setSize | ( | float | x_min, |
| float | x_max, | ||
| float | y_min, | ||
| float | y_max, | ||
| float | resolution, | ||
| float | default_value = 0.5f |
||
| ) |
Change the size of gridmap, erasing all its previous contents.
- Parameters
-
x_min The "x" coordinates of left most side of grid. x_max The "x" coordinates of right most side of grid. y_min The "y" coordinates of top most side of grid. y_max The "y" coordinates of bottom most side of grid. resolution The new size of cells. default_value The value of cells, tipically 0.5.
- See also
- ResizeGrid
Definition at line 149 of file COccupancyGridMap2D_common.cpp.
References ASSERT_, mrpt::utils::CDynamicGrid< T >::clear(), freeMap(), m_basis_map, m_is_empty, m_voronoi_diagram, map, MRPT_END, MRPT_START, p2l(), precomputedLikelihoodToBeRecomputed, resolution, mrpt::utils::round(), size_x, size_y, x_max, x_min, y_max, and y_min.
Referenced by mrpt::slam::CGridMapAligner::AlignPDF_correlation(), COccupancyGridMap2D(), internal_clear(), run_rnav_test(), and subSample().
◆ setVoroniClearance()
|
inlineprotected |
Used to set the clearance of a cell, while building the Voronoi diagram.
Definition at line 483 of file maps/COccupancyGridMap2D.h.
References ASSERT_ABOVEEQ_, ASSERT_BELOWEQ_, mrpt::utils::CDynamicGrid< T >::cellByIndex(), mrpt::utils::CDynamicGrid< T >::getSizeX(), and mrpt::utils::CDynamicGrid< T >::getSizeY().
◆ simulateScanRay()
| void COccupancyGridMap2D::simulateScanRay | ( | const double | x, |
| const double | y, | ||
| const double | angle_direction, | ||
| float & | out_range, | ||
| bool & | out_valid, | ||
| const double | max_range_meters, | ||
| const float | threshold_free = 0.4f, |
||
| const double | noiseStd = .0, |
||
| const double | angleNoiseStd = .0 |
||
| ) | const |
Simulate just one "ray" in the grid map.
This method is used internally to sonarSimulator and laserScanSimulator.
Definition at line 113 of file COccupancyGridMap2D_simulate.cpp.
References mrpt::random::CRandomGenerator::drawGaussian1D_normalized(), int_x2idx, int_y2idx, INTPRECNUMBIT, mrpt::random::randomGenerator, and mrpt::utils::round().
Referenced by func_laserSimul_callback().
◆ sonarSimulator()
| void COccupancyGridMap2D::sonarSimulator | ( | mrpt::obs::CObservationRange & | inout_observation, |
| const mrpt::poses::CPose2D & | robotPose, | ||
| float | threshold = 0.5f, |
||
| float | rangeNoiseStd = 0.f, |
||
| float | angleNoiseStd = mrpt::utils::DEG2RAD(0.f) |
||
| ) | const |
Simulates the observations of a sonar rig into the current grid map.
The simulated ranges are stored in a CObservationRange object, which is also used to pass in some needed parameters, as the poses of the sonar sensors onto the mobile robot.
- Parameters
-
inout_observation [IN/OUT] This must be filled with desired parameters before calling, and will contain the simulated ranges on return. robotPose [IN] The robot pose in this map coordinates. Recall that sensor pose relative to this robot pose must be specified in the observation object. threshold [IN] The minimum occupancy threshold to consider a cell to be occupied (Default: 0.5f) rangeNoiseStd [IN] The standard deviation of measurement noise. If not desired, set to 0. angleNoiseStd [IN] The sigma of an optional Gaussian noise added to the angles at which ranges are measured (in radians).
Definition at line 74 of file COccupancyGridMap2D_simulate.cpp.
References ASSERT_, mrpt::obs::CObservationRange::begin(), DEG2RAD, mrpt::obs::CObservationRange::end(), mrpt::obs::CObservationRange::maxSensorDistance, mrpt::poses::CPose2D::phi(), mrpt::utils::round(), mrpt::obs::CObservationRange::sensorConeApperture, mrpt::poses::CPoseOrPoint< DERIVEDCLASS >::x(), and mrpt::poses::CPoseOrPoint< DERIVEDCLASS >::y().
◆ squareDistanceToClosestCorrespondence()
|
virtualinherited |
Returns the square distance from the 2D point (x0,y0) to the closest correspondence in the map.
Reimplemented in mrpt::maps::CPointsMap.
Definition at line 178 of file CMetricMap.cpp.
References MRPT_END, MRPT_START, MRPT_UNUSED_PARAM, and THROW_EXCEPTION.
◆ subSample()
| void COccupancyGridMap2D::subSample | ( | int | downRatio | ) |
Performs a downsampling of the gridmap, by a given factor: resolution/=ratio.
Definition at line 498 of file COccupancyGridMap2D_common.cpp.
References ASSERT_, getCell(), map, p2l(), resolution, mrpt::utils::round(), setSize(), x_max, x_min, y_max, and y_min.
◆ updateCell()
| void COccupancyGridMap2D::updateCell | ( | int | x, |
| int | y, | ||
| float | v | ||
| ) |
Performs the Bayesian fusion of a new observation of a cell.
Definition at line 459 of file COccupancyGridMap2D_common.cpp.
References mrpt::maps::COccupancyGridMap2D::TUpdateCellsInfoChangeOnly::cellsUpdated, mrpt::maps::COccupancyGridMap2D::TUpdateCellsInfoChangeOnly::enabled, H(), mrpt::maps::COccupancyGridMap2D::TUpdateCellsInfoChangeOnly::I_change, l2p(), map, MAX_H, OCCGRID_CELLTYPE_MAX, OCCGRID_CELLTYPE_MIN, p2l(), size_x, size_y, and updateInfoChangeOnly.
◆ updateCell_fast_free() [1/2]
|
inlinestaticinherited |
Performs the Bayesian fusion of a new observation of a cell, without checking for grid limits nor updateInfoChangeOnly.
This method increases the "free-ness" of a cell, managing possible saturation.
- Parameters
-
x Cell index in X axis. y Cell index in Y axis. logodd_obs Observation of the cell, in log-odd form as transformed by p2l. thres This must be CELLTYPE_MAX-logodd_obs
- See also
- updateCell_fast_occupied
Definition at line 102 of file maps/CLogOddsGridMap2D.h.
◆ updateCell_fast_free() [2/2]
|
inlinestaticinherited |
Performs the Bayesian fusion of a new observation of a cell, without checking for grid limits nor updateInfoChangeOnly.
This method increases the "free-ness" of a cell, managing possible saturation.
- Parameters
-
x Cell index in X axis. y Cell index in Y axis. logodd_obs Observation of the cell, in log-odd form as transformed by p2l. thres This must be CELLTYPE_MAX-logodd_obs
- See also
- updateCell_fast_occupied
Definition at line 124 of file maps/CLogOddsGridMap2D.h.
◆ updateCell_fast_occupied() [1/2]
|
inlinestaticinherited |
Performs the Bayesian fusion of a new observation of a cell, without checking for grid limits nor updateInfoChangeOnly.
This method increases the "occupancy-ness" of a cell, managing possible saturation.
- Parameters
-
x Cell index in X axis. y Cell index in Y axis. logodd_obs Observation of the cell, in log-odd form as transformed by p2l. thres This must be CELLTYPE_MIN+logodd_obs
- See also
- updateCell, updateCell_fast_free
Definition at line 63 of file maps/CLogOddsGridMap2D.h.
◆ updateCell_fast_occupied() [2/2]
|
inlinestaticinherited |
Performs the Bayesian fusion of a new observation of a cell, without checking for grid limits nor updateInfoChangeOnly.
This method increases the "occupancy-ness" of a cell, managing possible saturation.
- Parameters
-
theCell The cell to modify logodd_obs Observation of the cell, in log-odd form as transformed by p2l. thres This must be CELLTYPE_MIN+logodd_obs
- See also
- updateCell, updateCell_fast_free
Definition at line 84 of file maps/CLogOddsGridMap2D.h.
◆ writeToMatlab()
|
inlinevirtualinherited |
Introduces a pure virtual method responsible for writing to a mxArray Matlab object, typically a MATLAB struct whose contents are documented in each derived class.
- Returns
- A new
mxArray(caller is responsible of memory freeing) or NULL is class does not support conversion to MATLAB.
Definition at line 79 of file CSerializable.h.
◆ writeToStream()
|
protectedvirtual |
Introduces a pure virtual method responsible for writing to a CStream.
This can not be used directly be users, instead use "stream << object;" for writing it to a stream.
- Parameters
-
out The output binary stream where object must be dumped. getVersion If NULL, the object must be dumped. If not, only the version of the object dump must be returned in this pointer. This enables the versioning of objects dumping and backward compatibility with previously stored data.
- Exceptions
-
std::exception On any error, see CStream::WriteBuffer
- See also
- CStream
Implements mrpt::utils::CSerializable.
Definition at line 53 of file COccupancyGridMap2D_io.cpp.
References ASSERT_, version, mrpt::utils::CStream::WriteBuffer(), and mrpt::utils::CStream::WriteBufferFixEndianness().
◆ x2idx() [1/3]
|
inline |
Transform a coordinate value into a cell index.
Definition at line 239 of file maps/COccupancyGridMap2D.h.
Referenced by mrpt::nav::PlannerSimple2D::computePath(), determineMatching2D(), mrpt::slam::CMonteCarloLocalization2D::resetUniformFreeSpace(), run_rnav_test(), saveAsBitmapTwoMapsWithCorrespondences(), and saveAsEMFTwoMapsWithCorrespondences().
◆ x2idx() [2/3]
|
inline |
Definition at line 242 of file maps/COccupancyGridMap2D.h.
◆ x2idx() [3/3]
|
inline |
Transform a coordinate value into a cell index, using a diferent "x_min" value.
Definition at line 250 of file maps/COccupancyGridMap2D.h.
◆ y2idx() [1/3]
|
inline |
Definition at line 240 of file maps/COccupancyGridMap2D.h.
Referenced by mrpt::nav::PlannerSimple2D::computePath(), determineMatching2D(), mrpt::slam::CMonteCarloLocalization2D::resetUniformFreeSpace(), run_rnav_test(), saveAsBitmapTwoMapsWithCorrespondences(), and saveAsEMFTwoMapsWithCorrespondences().
◆ y2idx() [2/3]
|
inline |
Definition at line 243 of file maps/COccupancyGridMap2D.h.
◆ y2idx() [3/3]
|
inline |
Definition at line 251 of file maps/COccupancyGridMap2D.h.
Friends And Related Function Documentation
◆ CMultiMetricMap
|
friend |
Backward compatible typedef.
Definition at line 93 of file maps/COccupancyGridMap2D.h.
◆ CMultiMetricMapPDF
|
friend |
Backward compatible typedef.
Definition at line 94 of file maps/COccupancyGridMap2D.h.
Member Data Documentation
◆ _init_COccupancyGridMap2D
|
staticprotected |
Definition at line 72 of file maps/COccupancyGridMap2D.h.
◆ CELLTYPE_MAX
|
staticinherited |
Definition at line 35 of file maps/CLogOddsGridMap2D.h.
◆ CELLTYPE_MIN
|
staticinherited |
Definition at line 34 of file maps/CLogOddsGridMap2D.h.
◆ classCMetricMap
|
staticinherited |
Definition at line 57 of file maps/CMetricMap.h.
◆ classCObject
|
staticinherited |
◆ classCOccupancyGridMap2D
|
static |
Definition at line 72 of file maps/COccupancyGridMap2D.h.
◆ classCSerializable
|
staticinherited |
Definition at line 42 of file CSerializable.h.
◆ classinfo
|
static |
Definition at line 72 of file maps/COccupancyGridMap2D.h.
◆ CriticalPointsList
| struct MAPS_IMPEXP mrpt::maps::COccupancyGridMap2D::TCriticalPointsList mrpt::maps::COccupancyGridMap2D::CriticalPointsList |
◆ direccion_vecino_x
|
private |
Used to store the 8 possible movements from a cell to the sorrounding ones.Filled in the constructor.
- See also
- direction2idx
Definition at line 805 of file maps/COccupancyGridMap2D.h.
◆ direccion_vecino_y
|
private |
Definition at line 805 of file maps/COccupancyGridMap2D.h.
◆ entropyTable
|
staticprotected |
Internally used to speed-up entropy calculation.
Definition at line 122 of file maps/COccupancyGridMap2D.h.
Referenced by computeEntropy().
◆ genericMapParams
|
inherited |
Common params to all maps.
Definition at line 227 of file maps/CMetricMap.h.
Referenced by mrpt::maps::internal::TMetricMapTypesRegistry::factoryMapObjectFromDefinition(), mrpt::maps::CGasConcentrationGridMap2D::getAs3DObject(), mrpt::maps::CReflectivityGridMap2D::getAs3DObject(), mrpt::maps::CHeightGridMap2D::getAs3DObject(), mrpt::maps::CBeaconMap::getAs3DObject(), mrpt::maps::CRandomFieldGridMap2D::getAs3DObject(), mrpt::maps::CLandmarksMap::getAs3DObject(), mrpt::maps::CPointsMap::getAs3DObject(), mrpt::maps::CGasConcentrationGridMap2D::readFromStream(), mrpt::maps::CReflectivityGridMap2D::readFromStream(), mrpt::maps::CGasConcentrationGridMap2D::writeToStream(), and mrpt::maps::CReflectivityGridMap2D::writeToStream().
◆ insertionOptions
| TInsertionOptions mrpt::maps::COccupancyGridMap2D::insertionOptions |
With this struct options are provided to the observation insertion process.
- See also
- CObservation::insertIntoGridMap
Definition at line 379 of file maps/COccupancyGridMap2D.h.
Referenced by internal_canComputeObservationLikelihood().
◆ likelihoodOptions
| mrpt::maps::COccupancyGridMap2D::TLikelihoodOptions mrpt::maps::COccupancyGridMap2D::likelihoodOptions |
◆ likelihoodOutputs
| class mrpt::maps::COccupancyGridMap2D::TLikelihoodOutput mrpt::maps::COccupancyGridMap2D::likelihoodOutputs |
◆ LOGODDS_LUT_ENTRIES
|
staticinherited |
Definition at line 37 of file maps/CLogOddsGridMap2D.h.
◆ m_basis_map
|
protected |
Used for Voronoi calculation.Same struct as "map", but contains a "0" if not a basis point.
Definition at line 108 of file maps/COccupancyGridMap2D.h.
Referenced by copyMapContentFrom(), freeMap(), and setSize().
◆ m_is_empty
|
protected |
True upon construction; used by isEmpty()
Definition at line 115 of file maps/COccupancyGridMap2D.h.
Referenced by copyMapContentFrom(), freeMap(), isEmpty(), OnPostSuccesfulInsertObs(), and setSize().
◆ m_logodd_lut
|
staticprotected |
Lookup tables for log-odds.
Definition at line 97 of file maps/COccupancyGridMap2D.h.
◆ m_private_map_register_id
|
static |
ID used to initialize class registration (just ignore it)
Definition at line 818 of file maps/COccupancyGridMap2D.h.
◆ m_voronoi_diagram
|
protected |
Used to store the Voronoi diagram.
Contains the distance of each cell to its closer obstacles in 1/100th distance units (i.e. in centimeters), or 0 if not into the Voronoi diagram
Definition at line 113 of file maps/COccupancyGridMap2D.h.
Referenced by copyMapContentFrom(), freeMap(), and setSize().
◆ map
|
protected |
Store of cell occupancy values. Order: row by row, from left to right.
Definition at line 99 of file maps/COccupancyGridMap2D.h.
Referenced by computeEntropy(), copyMapContentFrom(), determineMatching2D(), fill(), freeMap(), setSize(), subSample(), and updateCell().
◆ OCCGRID_CELLTYPE_MAX
|
static |
Definition at line 86 of file maps/COccupancyGridMap2D.h.
Referenced by updateCell().
◆ OCCGRID_CELLTYPE_MIN
|
static |
Discrete to float conversion factors: The min/max values of the integer cell type, eg.
[0,255] or [0,65535]
Definition at line 85 of file maps/COccupancyGridMap2D.h.
Referenced by updateCell().
◆ OCCGRID_P2LTABLE_SIZE
|
static |
Definition at line 87 of file maps/COccupancyGridMap2D.h.
◆ P2LTABLE_SIZE
|
staticinherited |
Definition at line 36 of file maps/CLogOddsGridMap2D.h.
◆ precomputedLikelihood
|
protected |
Auxiliary variables to speed up the computation of observation likelihood values for LF method among others, at a high cost in memory (see TLikelihoodOptions::enableLikelihoodCache).
Definition at line 104 of file maps/COccupancyGridMap2D.h.
◆ precomputedLikelihoodToBeRecomputed
|
protected |
Definition at line 105 of file maps/COccupancyGridMap2D.h.
Referenced by copyMapContentFrom(), fill(), freeMap(), internal_clear(), and setSize().
◆ RAYTRACE_STEP_SIZE_IN_CELL_UNITS
|
static |
(Default:1.0) Can be set to <1 if a more fine raytracing is needed in sonarSimulator() and laserScanSimulator(), or >1 to speed it up.
Definition at line 89 of file maps/COccupancyGridMap2D.h.
◆ resolution
|
protected |
Cell size, i.e. resolution of the grid map.
Definition at line 102 of file maps/COccupancyGridMap2D.h.
Referenced by COccupancyGridMap2D(), computeEntropy(), computePathCost(), copyMapContentFrom(), determineMatching2D(), laserScanSimulatorWithUncertainty(), setSize(), and subSample().
◆ size_x
|
protected |
Definition at line 100 of file maps/COccupancyGridMap2D.h.
Referenced by copyMapContentFrom(), determineMatching2D(), freeMap(), setSize(), and updateCell().
◆ size_y
|
protected |
The size of the grid in cells.
Definition at line 100 of file maps/COccupancyGridMap2D.h.
Referenced by copyMapContentFrom(), determineMatching2D(), freeMap(), setSize(), and updateCell().
◆ updateInfoChangeOnly
| struct MAPS_IMPEXP mrpt::maps::COccupancyGridMap2D::TUpdateCellsInfoChangeOnly mrpt::maps::COccupancyGridMap2D::updateInfoChangeOnly |
Referenced by updateCell().
◆ voroni_free_threshold
|
protected |
The free-cells threshold used to compute the Voronoi diagram.
Definition at line 119 of file maps/COccupancyGridMap2D.h.
◆ x_max
|
protected |
Definition at line 101 of file maps/COccupancyGridMap2D.h.
Referenced by copyMapContentFrom(), determineMatching2D(), setSize(), and subSample().
◆ x_min
|
protected |
Definition at line 101 of file maps/COccupancyGridMap2D.h.
Referenced by copyMapContentFrom(), determineMatching2D(), setSize(), and subSample().
◆ y_max
|
protected |
The limits of the grid in "units" (meters)
Definition at line 101 of file maps/COccupancyGridMap2D.h.
Referenced by copyMapContentFrom(), determineMatching2D(), setSize(), and subSample().
◆ y_min
|
protected |
Definition at line 101 of file maps/COccupancyGridMap2D.h.
Referenced by copyMapContentFrom(), determineMatching2D(), setSize(), and subSample().