Detailed Description
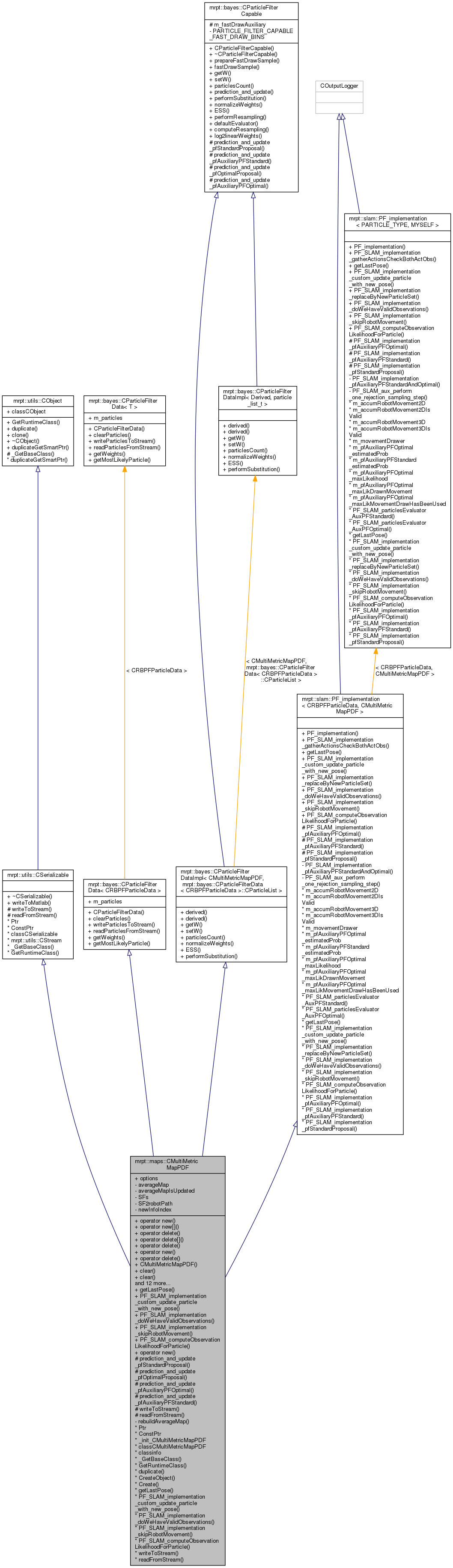
Declares a class that represents a Rao-Blackwellized set of particles for solving the SLAM problem (This class is the base of RBPF-SLAM applications).
This class is used internally by the map building algorithm in "mrpt::slam::CMetricMapBuilderRBPF"
Definition at line 62 of file maps/CMultiMetricMapPDF.h.
#include <mrpt/maps/CMultiMetricMapPDF.h>
Classes | |
| struct | TPredictionParams |
| The struct for passing extra simulation parameters to the prediction/update stage when running a particle filter. More... | |
Public Types | |
| typedef CRBPFParticleData | CParticleDataContent |
| This is the type inside the corresponding CParticleData class. More... | |
| typedef CProbabilityParticle< CRBPFParticleData > | CParticleData |
| Use this to refer to each element in the m_particles array. More... | |
| typedef std::deque< CParticleData > | CParticleList |
| Use this type to refer to the list of particles m_particles. More... | |
| typedef double(* | TParticleProbabilityEvaluator) (const bayes::CParticleFilter::TParticleFilterOptions &PF_options, const CParticleFilterCapable *obj, size_t index, const void *action, const void *observation) |
| A callback function type for evaluating the probability of m_particles of being selected, used in "fastDrawSample". More... | |
Public Member Functions | |
| void * | operator new (size_t size) |
| void * | operator new[] (size_t size) |
| void | operator delete (void *ptr) throw () |
| void | operator delete[] (void *ptr) throw () |
| void | operator delete (void *memory, void *ptr) throw () |
| void * | operator new (size_t size, const std::nothrow_t &) throw () |
| void | operator delete (void *ptr, const std::nothrow_t &) throw () |
| CMultiMetricMapPDF (const bayes::CParticleFilter::TParticleFilterOptions &opts=bayes::CParticleFilter::TParticleFilterOptions(), const mrpt::maps::TSetOfMetricMapInitializers *mapsInitializers=NULL, const TPredictionParams *predictionOptions=NULL) | |
| Constructor. More... | |
| void | clear (const mrpt::poses::CPose2D &initialPose) |
| Clear all elements of the maps, and restore all paths to a single starting pose. More... | |
| void | clear (const mrpt::poses::CPose3D &initialPose) |
| void | clear (const mrpt::maps::CSimpleMap &prevMap, const mrpt::poses::CPose3D ¤tPose) |
| Resets the map by loading an already-mapped map for past poses. More... | |
| void | getEstimatedPosePDFAtTime (size_t timeStep, mrpt::poses::CPose3DPDFParticles &out_estimation) const |
| Returns the estimate of the robot pose as a particles PDF for the instant of time "timeStep", from 0 to N-1. More... | |
| void | getEstimatedPosePDF (mrpt::poses::CPose3DPDFParticles &out_estimation) const |
| Returns the current estimate of the robot pose, as a particles PDF. More... | |
| const CMultiMetricMap * | getAveragedMetricMapEstimation () |
| Returns the weighted averaged map based on the current best estimation. More... | |
| const CMultiMetricMap * | getCurrentMostLikelyMetricMap () const |
| Returns a pointer to the current most likely map (associated to the most likely particle) More... | |
| size_t | getNumberOfObservationsInSimplemap () const |
| Get the number of CSensoryFrame inserted into the internal member SFs. More... | |
| bool | insertObservation (mrpt::obs::CSensoryFrame &sf) |
| Insert an observation to the map, at each particle's pose and to each particle's metric map. More... | |
| void | getPath (size_t i, std::deque< math::TPose3D > &out_path) const |
| Return the path (in absolute coordinate poses) for the i'th particle. More... | |
| double | getCurrentEntropyOfPaths () |
| Returns the current entropy of paths, computed as the average entropy of poses along the path, where entropy of each pose estimation is computed as the entropy of the gaussian approximation covariance. More... | |
| double | getCurrentJointEntropy () |
| Returns the joint entropy estimation over paths and maps, acording to "Information Gain-based Exploration Using" by C. More... | |
| void | updateSensoryFrameSequence () |
| Update the poses estimation of the member "SFs" according to the current path belief. More... | |
| void | saveCurrentPathEstimationToTextFile (const std::string &fil) |
| A logging utility: saves the current path estimation for each particle in a text file (a row per particle, each 3-column-entry is a set [x,y,phi], respectively). More... | |
| virtual mxArray * | writeToMatlab () const |
Introduces a pure virtual method responsible for writing to a mxArray Matlab object, typically a MATLAB struct whose contents are documented in each derived class. More... | |
| CObject * | clone () const |
| Cloning interface for smart pointers. More... | |
| void | clearParticles () |
| Free the memory of all the particles and reset the array "m_particles" to length zero. More... | |
| void | writeParticlesToStream (STREAM &out) const |
| Dumps the sequence of particles and their weights to a stream (requires T implementing CSerializable). More... | |
| void | readParticlesFromStream (STREAM &in) |
| Reads the sequence of particles and their weights from a stream (requires T implementing CSerializable). More... | |
| void | getWeights (std::vector< double > &out_logWeights) const |
| Returns a vector with the sequence of the logaritmic weights of all the samples. More... | |
| const CParticleData * | getMostLikelyParticle () const |
| Returns the particle with the highest weight. More... | |
| const CMultiMetricMapPDF & | derived () const |
| CRTP helper method. More... | |
| CMultiMetricMapPDF & | derived () |
| CRTP helper method. More... | |
| double | getW (size_t i) const MRPT_OVERRIDE |
| Access to i'th particle (logarithm) weight, where first one is index 0. More... | |
| void | setW (size_t i, double w) MRPT_OVERRIDE |
| Modifies i'th particle (logarithm) weight, where first one is index 0. More... | |
| size_t | particlesCount () const MRPT_OVERRIDE |
| Get the m_particles count. More... | |
| double | normalizeWeights (double *out_max_log_w=NULL) MRPT_OVERRIDE |
| Normalize the (logarithmic) weights, such as the maximum weight is zero. More... | |
| double | ESS () const MRPT_OVERRIDE |
| Returns the normalized ESS (Estimated Sample Size), in the range [0,1]. More... | |
| void | performSubstitution (const std::vector< size_t > &indx) MRPT_OVERRIDE |
| Replaces the old particles by copies determined by the indexes in "indx", performing an efficient copy of the necesary particles only and allowing the number of particles to change. More... | |
| void | prepareFastDrawSample (const bayes::CParticleFilter::TParticleFilterOptions &PF_options, TParticleProbabilityEvaluator partEvaluator=defaultEvaluator, const void *action=NULL, const void *observation=NULL) const |
| Prepares data structures for calling fastDrawSample method next. More... | |
| size_t | fastDrawSample (const bayes::CParticleFilter::TParticleFilterOptions &PF_options) const |
| Draws a random sample from the particle filter, in such a way that each particle has a probability proportional to its weight (in the standard PF algorithm). More... | |
| void | prediction_and_update (const mrpt::obs::CActionCollection *action, const mrpt::obs::CSensoryFrame *observation, const bayes::CParticleFilter::TParticleFilterOptions &PF_options) |
| Performs the prediction stage of the Particle Filter. More... | |
| void | performResampling (const bayes::CParticleFilter::TParticleFilterOptions &PF_options, size_t out_particle_count=0) |
| Performs a resample of the m_particles, using the method selected in the constructor. More... | |
| bool | PF_SLAM_implementation_gatherActionsCheckBothActObs (const mrpt::obs::CActionCollection *actions, const mrpt::obs::CSensoryFrame *sf) |
| Auxiliary method called by PF implementations: return true if we have both action & observation, otherwise, return false AND accumulate the odometry so when we have an observation we didn't lose a thing. More... | |
Virtual methods that the PF_implementations assume exist. | |
| mrpt::math::TPose3D | getLastPose (const size_t i, bool &pose_is_valid) const MRPT_OVERRIDE |
| Return the last robot pose in the i'th particle; pose_is_valid will be false if particle is a path and it's empty. More... | |
| void | PF_SLAM_implementation_custom_update_particle_with_new_pose (CParticleDataContent *particleData, const mrpt::math::TPose3D &newPose) const MRPT_OVERRIDE |
| bool | PF_SLAM_implementation_doWeHaveValidObservations (const CParticleList &particles, const mrpt::obs::CSensoryFrame *sf) const MRPT_OVERRIDE |
| bool | PF_SLAM_implementation_skipRobotMovement () const MRPT_OVERRIDE |
| Do not move the particles until the map is populated. More... | |
| double | PF_SLAM_computeObservationLikelihoodForParticle (const mrpt::bayes::CParticleFilter::TParticleFilterOptions &PF_options, const size_t particleIndexForMap, const mrpt::obs::CSensoryFrame &observation, const mrpt::poses::CPose3D &x) const MRPT_OVERRIDE |
| Evaluate the observation likelihood for one particle at a given location. More... | |
RTTI classes and functions | |
| mrpt::utils::CObjectPtr | duplicateGetSmartPtr () const |
| Returns a copy of the object, indepently of its class, as a smart pointer (the newly created object will exist as long as any copy of this smart pointer). More... | |
Virtual methods that the PF_implementations assume exist. | |
| virtual void | PF_SLAM_implementation_custom_update_particle_with_new_pose (CRBPFParticleData *particleData, const mrpt::math::TPose3D &newPose) const=0 |
| virtual void | PF_SLAM_implementation_replaceByNewParticleSet (typename mrpt::bayes::CParticleFilterData< CRBPFParticleData >::CParticleList &old_particles, const std::vector< mrpt::math::TPose3D > &newParticles, const std::vector< double > &newParticlesWeight, const std::vector< size_t > &newParticlesDerivedFromIdx) const |
| This is the default algorithm to efficiently replace one old set of samples by another new set. More... | |
| virtual bool | PF_SLAM_implementation_doWeHaveValidObservations (const typename mrpt::bayes::CParticleFilterData< CRBPFParticleData >::CParticleList &particles, const mrpt::obs::CSensoryFrame *sf) const |
Static Public Member Functions | |
| static void * | operator new (size_t size, void *ptr) |
| static double | defaultEvaluator (const bayes::CParticleFilter::TParticleFilterOptions &PF_options, const CParticleFilterCapable *obj, size_t index, const void *action, const void *observation) |
| The default evaluator function, which simply returns the particle weight. More... | |
| static void | computeResampling (CParticleFilter::TParticleResamplingAlgorithm method, const std::vector< double > &in_logWeights, std::vector< size_t > &out_indexes, size_t out_particle_count=0) |
| A static method to perform the computation of the samples resulting from resampling a given set of particles, given their logarithmic weights, and a resampling method. More... | |
| static void | log2linearWeights (const std::vector< double > &in_logWeights, std::vector< double > &out_linWeights) |
| A static method to compute the linear, normalized (the sum the unity) weights from log-weights. More... | |
Public Attributes | |
| mrpt::maps::CMultiMetricMapPDF::TPredictionParams | options |
| CParticleList | m_particles |
| The array of particles. More... | |
Static Public Attributes | |
| static const mrpt::utils::TRuntimeClassId | classCObject |
RTTI stuff | |
| static const mrpt::utils::TRuntimeClassId | classCSerializable |
Protected Member Functions | |
| void | prediction_and_update_pfStandardProposal (const mrpt::obs::CActionCollection *action, const mrpt::obs::CSensoryFrame *observation, const bayes::CParticleFilter::TParticleFilterOptions &PF_options) MRPT_OVERRIDE |
| Performs the particle filter prediction/update stages for the algorithm "pfStandardProposal" (if not implemented in heritated class, it will raise a 'non-implemented' exception). More... | |
| void | prediction_and_update_pfOptimalProposal (const mrpt::obs::CActionCollection *action, const mrpt::obs::CSensoryFrame *observation, const bayes::CParticleFilter::TParticleFilterOptions &PF_options) MRPT_OVERRIDE |
| Performs the particle filter prediction/update stages for the algorithm "pfOptimalProposal" (if not implemented in heritated class, it will raise a 'non-implemented' exception). More... | |
| void | prediction_and_update_pfAuxiliaryPFOptimal (const mrpt::obs::CActionCollection *action, const mrpt::obs::CSensoryFrame *observation, const bayes::CParticleFilter::TParticleFilterOptions &PF_options) MRPT_OVERRIDE |
| Performs the particle filter prediction/update stages for the algorithm "pfAuxiliaryPFOptimal" (if not implemented in heritated class, it will raise a 'non-implemented' exception). More... | |
| void | prediction_and_update_pfAuxiliaryPFStandard (const mrpt::obs::CActionCollection *action, const mrpt::obs::CSensoryFrame *observation, const bayes::CParticleFilter::TParticleFilterOptions &PF_options) MRPT_OVERRIDE |
| Performs the particle filter prediction/update stages for the algorithm "pfAuxiliaryPFStandard" (if not implemented in heritated class, it will raise a 'non-implemented' exception). More... | |
CSerializable virtual methods | |
| void | writeToStream (mrpt::utils::CStream &out, int *getVersion) const |
| Introduces a pure virtual method responsible for writing to a CStream. More... | |
| void | readFromStream (mrpt::utils::CStream &in, int version) |
| Introduces a pure virtual method responsible for loading from a CStream This can not be used directly be users, instead use "stream >> object;" for reading it from a stream or "stream >> object_ptr;" if the class is unknown apriori. More... | |
The generic PF implementations for localization & SLAM. | |
| void | PF_SLAM_implementation_pfAuxiliaryPFOptimal (const mrpt::obs::CActionCollection *actions, const mrpt::obs::CSensoryFrame *sf, const mrpt::bayes::CParticleFilter::TParticleFilterOptions &PF_options, const TKLDParams &KLD_options) |
| A generic implementation of the PF method "prediction_and_update_pfAuxiliaryPFOptimal" (optimal sampling with rejection sampling approximation), common to both localization and mapping. More... | |
| void | PF_SLAM_implementation_pfAuxiliaryPFStandard (const mrpt::obs::CActionCollection *actions, const mrpt::obs::CSensoryFrame *sf, const mrpt::bayes::CParticleFilter::TParticleFilterOptions &PF_options, const TKLDParams &KLD_options) |
| A generic implementation of the PF method "prediction_and_update_pfAuxiliaryPFStandard" (Auxiliary particle filter with the standard proposal), common to both localization and mapping. More... | |
| void | PF_SLAM_implementation_pfStandardProposal (const mrpt::obs::CActionCollection *actions, const mrpt::obs::CSensoryFrame *sf, const mrpt::bayes::CParticleFilter::TParticleFilterOptions &PF_options, const TKLDParams &KLD_options) |
| A generic implementation of the PF method "pfStandardProposal" (standard proposal distribution, that is, a simple SIS particle filter), common to both localization and mapping. More... | |
Protected Attributes | |
| TFastDrawAuxVars | m_fastDrawAuxiliary |
| Auxiliary vectors, see CParticleFilterCapable::prepareFastDrawSample for more information. More... | |
Private Member Functions | |
| void | rebuildAverageMap () |
| Rebuild the "expected" grid map. More... | |
Private Attributes | |
| mrpt::maps::CMultiMetricMap | averageMap |
| Internal buffer for the averaged map. More... | |
| bool | averageMapIsUpdated |
| mrpt::maps::CSimpleMap | SFs |
| The SFs and their corresponding pose estimations. More... | |
| std::vector< uint32_t > | SF2robotPath |
| A mapping between indexes in the SFs to indexes in the robot paths from particles. More... | |
| float | newInfoIndex |
| An index [0,1] measuring how much information an observation aports to the map (Typ. threshold=0.07) More... | |
Friends | |
| class | mrpt::slam::CMetricMapBuilderRBPF |
RTTI stuff | |
| typedef CMultiMetricMapPDFPtr | Ptr |
| typedef CMultiMetricMapPDFPtr | ConstPtr |
| static mrpt::utils::CLASSINIT | _init_CMultiMetricMapPDF |
| static mrpt::utils::TRuntimeClassId | classCMultiMetricMapPDF |
| static const mrpt::utils::TRuntimeClassId * | classinfo |
| static const mrpt::utils::TRuntimeClassId * | _GetBaseClass () |
| virtual const mrpt::utils::TRuntimeClassId * | GetRuntimeClass () const |
| Returns information about the class of an object in runtime. More... | |
| virtual mrpt::utils::CObject * | duplicate () const |
| Returns a copy of the object, indepently of its class. More... | |
| static mrpt::utils::CObject * | CreateObject () |
| static CMultiMetricMapPDFPtr | Create () |
Member Typedef Documentation
◆ ConstPtr
| typedef CMultiMetricMapPDFPtr mrpt::maps::CMultiMetricMapPDF::ConstPtr |
Definition at line 71 of file maps/CMultiMetricMapPDF.h.
◆ CParticleData
|
inherited |
Use this to refer to each element in the m_particles array.
Definition at line 174 of file CParticleFilterData.h.
◆ CParticleDataContent
|
inherited |
This is the type inside the corresponding CParticleData class.
Definition at line 173 of file CParticleFilterData.h.
◆ CParticleList
|
inherited |
Use this type to refer to the list of particles m_particles.
Definition at line 175 of file CParticleFilterData.h.
◆ Ptr
| typedef CMultiMetricMapPDFPtr mrpt::maps::CMultiMetricMapPDF::Ptr |
A typedef for the associated smart pointer
Definition at line 71 of file maps/CMultiMetricMapPDF.h.
◆ TParticleProbabilityEvaluator
|
inherited |
A callback function type for evaluating the probability of m_particles of being selected, used in "fastDrawSample".
The default evaluator function "defaultEvaluator" simply returns the particle weight.
- Parameters
-
index This is the index of the particle its probability is being computed. action The value of this is the parameter passed to "prepareFastDrawSample" observation The value of this is the parameter passed to "prepareFastDrawSample" The action and the observation are declared as "void*" for a greater flexibility.
- See also
- prepareFastDrawSample
Definition at line 54 of file CParticleFilterCapable.h.
Constructor & Destructor Documentation
◆ CMultiMetricMapPDF()
| CMultiMetricMapPDF::CMultiMetricMapPDF | ( | const bayes::CParticleFilter::TParticleFilterOptions & | opts = bayes::CParticleFilter::TParticleFilterOptions(), |
| const mrpt::maps::TSetOfMetricMapInitializers * | mapsInitializers = NULL, |
||
| const TPredictionParams * | predictionOptions = NULL |
||
| ) |
Member Function Documentation
◆ _GetBaseClass()
|
staticprotected |
◆ clear() [1/3]
| void CMultiMetricMapPDF::clear | ( | const mrpt::poses::CPose2D & | initialPose | ) |
Clear all elements of the maps, and restore all paths to a single starting pose.
Definition at line 77 of file CMultiMetricMapPDF.cpp.
References mrpt::utils::clear().
Referenced by mrpt::slam::CMetricMapBuilderRBPF::clear(), and mrpt::slam::CMetricMapBuilderRBPF::initialize().
◆ clear() [2/3]
| void CMultiMetricMapPDF::clear | ( | const mrpt::poses::CPose3D & | initialPose | ) |
This is an overloaded member function, provided for convenience. It differs from the above function only in what argument(s) it accepts.
Definition at line 86 of file CMultiMetricMapPDF.cpp.
◆ clear() [3/3]
| void CMultiMetricMapPDF::clear | ( | const mrpt::maps::CSimpleMap & | prevMap, |
| const mrpt::poses::CPose3D & | currentPose | ||
| ) |
Resets the map by loading an already-mapped map for past poses.
Current robot pose should be normally set to the last keyframe in the simplemap.
Definition at line 105 of file CMultiMetricMapPDF.cpp.
References ASSERT_, mrpt::utils::clear(), mrpt::maps::CSimpleMap::clear(), mrpt::maps::CSimpleMap::get(), IS_CLASS, and mrpt::maps::CSimpleMap::size().
◆ clearParticles()
|
inlineinherited |
Free the memory of all the particles and reset the array "m_particles" to length zero.
Definition at line 183 of file CParticleFilterData.h.
References mrpt::bayes::CParticleFilterData< T >::m_particles.
◆ clone()
|
inlineinherited |
◆ computeResampling()
|
staticinherited |
A static method to perform the computation of the samples resulting from resampling a given set of particles, given their logarithmic weights, and a resampling method.
It returns the sequence of indexes from the resampling. The number of output samples is the same than the input population. This generic method just computes these indexes, to actually perform a resampling in a particle filter object, call performResampling
- Parameters
-
[in] out_particle_count The desired number of output particles after resampling; 0 means don't modify the current number.
- See also
- performResampling
Definition at line 64 of file CParticleFilterCapable.cpp.
References ASSERT_, mrpt::random::CRandomGenerator::drawUniform(), mrpt::random::CRandomGenerator::drawUniformVector(), mrpt::format(), mrpt::math::maximum(), MRPT_END, MRPT_START, R, mrpt::random::randomGenerator, and THROW_EXCEPTION.
◆ Create()
|
static |
◆ CreateObject()
|
static |
◆ defaultEvaluator()
|
inlinestaticinherited |
The default evaluator function, which simply returns the particle weight.
The action and the observation are declared as "void*" for a greater flexibility.
- See also
- prepareFastDrawSample
Definition at line 65 of file CParticleFilterCapable.h.
References MRPT_UNUSED_PARAM.
◆ derived() [1/2]
|
inlineinherited |
CRTP helper method.
Definition at line 34 of file CParticleFilterData.h.
◆ derived() [2/2]
|
inlineinherited |
CRTP helper method.
Definition at line 36 of file CParticleFilterData.h.
◆ duplicate()
|
virtual |
Returns a copy of the object, indepently of its class.
Implements mrpt::utils::CObject.
◆ duplicateGetSmartPtr()
|
inlineinherited |
Returns a copy of the object, indepently of its class, as a smart pointer (the newly created object will exist as long as any copy of this smart pointer).
Definition at line 162 of file CObject.h.
References mrpt::utils::CObjectPtr.
Referenced by mrpt::obs::CRawlog::addActions(), mrpt::slam::CIncrementalMapPartitioner::addMapFrame(), and mrpt::obs::CRawlog::addObservations().
◆ ESS()
|
inlinevirtualinherited |
Returns the normalized ESS (Estimated Sample Size), in the range [0,1].
Note that you do NOT need to normalize the weights before calling this.
Implements mrpt::bayes::CParticleFilterCapable.
Definition at line 78 of file CParticleFilterData.h.
References mrpt::bayes::CParticleFilterDataImpl< Derived, particle_list_t >::derived(), MRPT_END, MRPT_START, and mrpt::math::square().
◆ fastDrawSample()
|
inherited |
Draws a random sample from the particle filter, in such a way that each particle has a probability proportional to its weight (in the standard PF algorithm).
This method can be used to generate a variable number of m_particles when resampling: to vary the number of m_particles in the filter. See prepareFastDrawSample for more information, or the Particle Filter tutorial.
NOTES:
- You MUST call "prepareFastDrawSample" ONCE before calling this method. That method must be called after modifying the particle filter (executing one step, resampling, etc...)
- This method returns ONE index for the selected ("drawn") particle, in the range [0,M-1]
- You do not need to call "normalizeWeights" before calling this.
- See also
- prepareFastDrawSample
Definition at line 454 of file CParticleFilterCapable.cpp.
References mrpt::bayes::CParticleFilter::TParticleFilterOptions::adaptiveSampleSize, mrpt::random::CRandomGenerator::drawUniform(), MRPT_END, MRPT_END_WITH_CLEAN_UP, MRPT_START, mrpt::random::randomGenerator, mrpt::bayes::CParticleFilter::TParticleFilterOptions::resamplingMethod, and THROW_EXCEPTION.
Referenced by mrpt::hmtslam::CLSLAM_RBPF_2DLASER::prediction_and_update_pfAuxiliaryPFOptimal().
◆ getAveragedMetricMapEstimation()
| const CMultiMetricMap * CMultiMetricMapPDF::getAveragedMetricMapEstimation | ( | ) |
Returns the weighted averaged map based on the current best estimation.
If you need a persistent copy of this object, please use "CSerializable::duplicate" and use the copy.
- See also
- Almost 100% sure you would prefer the best current map, given by getCurrentMostLikelyMetricMap()
Definition at line 307 of file CMultiMetricMapPDF.cpp.
◆ getCurrentEntropyOfPaths()
| double CMultiMetricMapPDF::getCurrentEntropyOfPaths | ( | ) |
Returns the current entropy of paths, computed as the average entropy of poses along the path, where entropy of each pose estimation is computed as the entropy of the gaussian approximation covariance.
Definition at line 471 of file CMultiMetricMapPDF.cpp.
References mrpt::utils::CProbabilityDensityFunction< TDATA, STATE_LEN >::getCovarianceEntropy().
◆ getCurrentJointEntropy()
| double CMultiMetricMapPDF::getCurrentJointEntropy | ( | ) |
Returns the joint entropy estimation over paths and maps, acording to "Information Gain-based Exploration Using" by C.
Stachniss, G. Grissetti and W.Burgard.
Definition at line 501 of file CMultiMetricMapPDF.cpp.
References ASSERT_, mrpt::maps::COccupancyGridMap2D::TEntropyInfo::H, and min.
Referenced by mrpt::slam::CMetricMapBuilderRBPF::getCurrentJointEntropy().
◆ getCurrentMostLikelyMetricMap()
| const CMultiMetricMap * CMultiMetricMapPDF::getCurrentMostLikelyMetricMap | ( | ) | const |
Returns a pointer to the current most likely map (associated to the most likely particle)
Definition at line 555 of file CMultiMetricMapPDF.cpp.
Referenced by mrpt::slam::CMetricMapBuilderRBPF::drawCurrentEstimationToImage(), and mrpt::slam::CMetricMapBuilderRBPF::getCurrentlyBuiltMetricMap().
◆ getEstimatedPosePDF()
| void CMultiMetricMapPDF::getEstimatedPosePDF | ( | mrpt::poses::CPose3DPDFParticles & | out_estimation | ) | const |
Returns the current estimate of the robot pose, as a particles PDF.
- See also
- getEstimatedPosePDFAtTime
Definition at line 169 of file CMultiMetricMapPDF.cpp.
References ASSERT_.
Referenced by mrpt::slam::CMetricMapBuilderRBPF::getCurrentPoseEstimation(), and mrpt::slam::CMetricMapBuilderRBPF::processActionObservation().
◆ getEstimatedPosePDFAtTime()
| void CMultiMetricMapPDF::getEstimatedPosePDFAtTime | ( | size_t | timeStep, |
| mrpt::poses::CPose3DPDFParticles & | out_estimation | ||
| ) | const |
Returns the estimate of the robot pose as a particles PDF for the instant of time "timeStep", from 0 to N-1.
- See also
- getEstimatedPosePDF
Definition at line 178 of file CMultiMetricMapPDF.cpp.
References mrpt::bayes::CParticleFilterData< T >::clearParticles(), and mrpt::bayes::CParticleFilterData< T >::m_particles.
◆ getLastPose()
|
virtual |
Return the last robot pose in the i'th particle; pose_is_valid will be false if particle is a path and it's empty.
Implements mrpt::slam::PF_implementation< CRBPFParticleData, CMultiMetricMapPDF >.
Definition at line 292 of file CMultiMetricMapPDF.cpp.
References THROW_EXCEPTION.
◆ getMostLikelyParticle()
|
inlineinherited |
Returns the particle with the highest weight.
Definition at line 240 of file CParticleFilterData.h.
References ASSERT_, mrpt::bayes::CParticleFilterData< T >::m_particles, MRPT_END, and MRPT_START.
◆ getNumberOfObservationsInSimplemap()
|
inline |
Get the number of CSensoryFrame inserted into the internal member SFs.
Definition at line 176 of file maps/CMultiMetricMapPDF.h.
References mrpt::maps::CSimpleMap::size().
◆ getPath()
| void CMultiMetricMapPDF::getPath | ( | size_t | i, |
| std::deque< math::TPose3D > & | out_path | ||
| ) | const |
Return the path (in absolute coordinate poses) for the i'th particle.
- Exceptions
-
On index out of bounds
Definition at line 461 of file CMultiMetricMapPDF.cpp.
References THROW_EXCEPTION.
Referenced by mrpt::slam::CMetricMapBuilderRBPF::drawCurrentEstimationToImage(), and mrpt::slam::CMetricMapBuilderRBPF::getCurrentMostLikelyPath().
◆ GetRuntimeClass()
|
virtual |
Returns information about the class of an object in runtime.
Reimplemented from mrpt::utils::CSerializable.
◆ getW()
|
inlinevirtualinherited |
Access to i'th particle (logarithm) weight, where first one is index 0.
Implements mrpt::bayes::CParticleFilterCapable.
Definition at line 38 of file CParticleFilterData.h.
References mrpt::bayes::CParticleFilterDataImpl< Derived, particle_list_t >::derived(), and THROW_EXCEPTION_FMT.
◆ getWeights()
|
inlineinherited |
Returns a vector with the sequence of the logaritmic weights of all the samples.
Definition at line 227 of file CParticleFilterData.h.
References mrpt::bayes::CParticleFilterData< T >::m_particles, MRPT_END, and MRPT_START.
◆ insertObservation()
| bool CMultiMetricMapPDF::insertObservation | ( | mrpt::obs::CSensoryFrame & | sf | ) |
Insert an observation to the map, at each particle's pose and to each particle's metric map.
- Parameters
-
sf The SF to be inserted
- Returns
- true if any may was updated, false otherwise
Definition at line 428 of file CMultiMetricMapPDF.cpp.
References mrpt::poses::CPose3DPDFParticles::Create(), and mrpt::obs::CSensoryFrame::insertObservationsInto().
Referenced by mrpt::slam::CMetricMapBuilderRBPF::processActionObservation().
◆ log2linearWeights()
|
staticinherited |
A static method to compute the linear, normalized (the sum the unity) weights from log-weights.
- See also
- performResampling
Definition at line 509 of file CParticleFilterCapable.cpp.
References ASSERT_, MRPT_END, and MRPT_START.
◆ normalizeWeights()
|
inlinevirtualinherited |
Normalize the (logarithmic) weights, such as the maximum weight is zero.
- Parameters
-
out_max_log_w If provided, will return with the maximum log_w before normalizing, such as new_weights = old_weights - max_log_w.
- Returns
- The max/min ratio of weights ("dynamic range")
Implements mrpt::bayes::CParticleFilterCapable.
Definition at line 55 of file CParticleFilterData.h.
References mrpt::bayes::CParticleFilterDataImpl< Derived, particle_list_t >::derived(), MRPT_END, and MRPT_START.
◆ operator delete() [1/3]
Definition at line 71 of file maps/CMultiMetricMapPDF.h.
◆ operator delete() [2/3]
Definition at line 71 of file maps/CMultiMetricMapPDF.h.
◆ operator delete() [3/3]
|
inline | ||||||||||||||||||||
Definition at line 71 of file maps/CMultiMetricMapPDF.h.
◆ operator delete[]()
Definition at line 71 of file maps/CMultiMetricMapPDF.h.
◆ operator new() [1/3]
Definition at line 71 of file maps/CMultiMetricMapPDF.h.
◆ operator new() [2/3]
|
inline | ||||||||||||||||||||
Definition at line 71 of file maps/CMultiMetricMapPDF.h.
◆ operator new() [3/3]
|
inline |
Definition at line 71 of file maps/CMultiMetricMapPDF.h.
◆ operator new[]()
|
inline |
Definition at line 71 of file maps/CMultiMetricMapPDF.h.
◆ particlesCount()
|
inlinevirtualinherited |
Get the m_particles count.
Implements mrpt::bayes::CParticleFilterCapable.
Definition at line 50 of file CParticleFilterData.h.
References mrpt::bayes::CParticleFilterDataImpl< Derived, particle_list_t >::derived().
◆ performResampling()
|
inherited |
Performs a resample of the m_particles, using the method selected in the constructor.
After computing the surviving samples, this method internally calls "performSubstitution" to actually perform the particle replacement. This method is called automatically by CParticleFilter::execute, andshould not be invoked manually normally. To just obtaining the sequence of resampled indexes from a sequence of weights, use "resample"
- Parameters
-
[in] out_particle_count The desired number of output particles after resampling; 0 means don't modify the current number.
- See also
- resample
Definition at line 29 of file CParticleFilterCapable.cpp.
References ASSERT_, MRPT_END, MRPT_START, and mrpt::bayes::CParticleFilter::TParticleFilterOptions::resamplingMethod.
◆ performSubstitution()
|
inlinevirtualinherited |
Replaces the old particles by copies determined by the indexes in "indx", performing an efficient copy of the necesary particles only and allowing the number of particles to change.
Implements mrpt::bayes::CParticleFilterCapable.
Definition at line 98 of file CParticleFilterData.h.
References ASSERT_, mrpt::bayes::CParticleFilterDataImpl< Derived, particle_list_t >::derived(), MRPT_END, and MRPT_START.
◆ PF_SLAM_computeObservationLikelihoodForParticle()
|
virtual |
Evaluate the observation likelihood for one particle at a given location.
Implements mrpt::slam::PF_implementation< CRBPFParticleData, CMultiMetricMapPDF >.
Definition at line 915 of file CMultiMetricMapPDF_RBPF.cpp.
References mrpt::obs::CSensoryFrame::begin(), mrpt::maps::CMetricMap::computeObservationLikelihood(), mrpt::obs::CSensoryFrame::end(), and MRPT_UNUSED_PARAM.
◆ PF_SLAM_implementation_custom_update_particle_with_new_pose() [1/2]
|
pure virtualinherited |
◆ PF_SLAM_implementation_custom_update_particle_with_new_pose() [2/2]
| void CMultiMetricMapPDF::PF_SLAM_implementation_custom_update_particle_with_new_pose | ( | CParticleDataContent * | particleData, |
| const mrpt::math::TPose3D & | newPose | ||
| ) | const |
Definition at line 886 of file CMultiMetricMapPDF_RBPF.cpp.
References mrpt::maps::CRBPFParticleData::robotPath.
◆ PF_SLAM_implementation_doWeHaveValidObservations() [1/2]
| bool CMultiMetricMapPDF::PF_SLAM_implementation_doWeHaveValidObservations | ( | const CParticleList & | particles, |
| const mrpt::obs::CSensoryFrame * | sf | ||
| ) | const |
Definition at line 894 of file CMultiMetricMapPDF_RBPF.cpp.
References ASSERT_.
◆ PF_SLAM_implementation_doWeHaveValidObservations() [2/2]
|
inlinevirtualinherited |
Definition at line 230 of file PF_implementations_data.h.
◆ PF_SLAM_implementation_gatherActionsCheckBothActObs()
|
inherited |
Auxiliary method called by PF implementations: return true if we have both action & observation, otherwise, return false AND accumulate the odometry so when we have an observation we didn't lose a thing.
On return=true, the "m_movementDrawer" member is loaded and ready to draw samples of the increment of pose since last step. This method is smart enough to accumulate CActionRobotMovement2D or CActionRobotMovement3D, whatever comes in.
Definition at line 44 of file PF_implementations.h.
◆ PF_SLAM_implementation_pfAuxiliaryPFOptimal()
|
protectedinherited |
A generic implementation of the PF method "prediction_and_update_pfAuxiliaryPFOptimal" (optimal sampling with rejection sampling approximation), common to both localization and mapping.
BINTYPE: TPoseBin or whatever to discretize the sample space for KLD-sampling.
This method implements optimal sampling with a rejection sampling-based approximation of the true posterior. For details, see the papers:
J.L. Blanco, J. Gonzalez, and J.-A. Fernandez-Madrigal, "An Optimal Filtering Algorithm for Non-Parametric Observation Models in Robot Localization," in Proc. IEEE International Conference on Robotics and Automation (ICRA'08), 2008, pp. 461-466.
BINTYPE: TPoseBin or whatever to discretize the sample space for KLD-sampling.
This method implements optimal sampling with a rejection sampling-based approximation of the true posterior. For details, see the papers:
J.-L. Blanco, J. Gonzalez, and J.-A. Fernandez-Madrigal, "An Optimal Filtering Algorithm for Non-Parametric Observation Models in Robot Localization," in Proc. IEEE International Conference on Robotics and Automation (ICRA'08), 2008, pp. 461466.
Definition at line 130 of file PF_implementations.h.
◆ PF_SLAM_implementation_pfAuxiliaryPFStandard()
|
protectedinherited |
A generic implementation of the PF method "prediction_and_update_pfAuxiliaryPFStandard" (Auxiliary particle filter with the standard proposal), common to both localization and mapping.
BINTYPE: TPoseBin or whatever to discretize the sample space for KLD-sampling.
This method is described in the paper: Pitt, M.K.; Shephard, N. (1999). "Filtering Via Simulation: Auxiliary Particle Filters". Journal of the American Statistical Association 94 (446): 590-591. doi:10.2307/2670179.
Definition at line 321 of file PF_implementations.h.
◆ PF_SLAM_implementation_pfStandardProposal()
|
protectedinherited |
A generic implementation of the PF method "pfStandardProposal" (standard proposal distribution, that is, a simple SIS particle filter), common to both localization and mapping.
- BINTYPE: TPoseBin or whatever to discretize the sample space for KLD-sampling.
Definition at line 148 of file PF_implementations.h.
◆ PF_SLAM_implementation_replaceByNewParticleSet()
|
inlinevirtualinherited |
This is the default algorithm to efficiently replace one old set of samples by another new set.
The method uses pointers to make fast copies the first time each particle is duplicated, then makes real copies for the next ones.
Note that more efficient specializations might exist for specific particle data structs.
Definition at line 164 of file PF_implementations_data.h.
◆ PF_SLAM_implementation_skipRobotMovement()
|
virtual |
Do not move the particles until the map is populated.
Reimplemented from mrpt::slam::PF_implementation< CRBPFParticleData, CMultiMetricMapPDF >.
Definition at line 904 of file CMultiMetricMapPDF_RBPF.cpp.
◆ PF_SLAM_particlesEvaluator_AuxPFOptimal()
|
staticprotectedinherited |
Definition at line 336 of file PF_implementations.h.
◆ PF_SLAM_particlesEvaluator_AuxPFStandard()
|
staticprotectedinherited |
Compute w[i]*p(z_t | mu_t^i), with mu_t^i being the mean of the new robot pose.
- Parameters
-
action MUST be a "const CPose3D*" observation MUST be a "const CSensoryFrame*" action MUST be a "const mrpt::poses::CPose3D*" observation MUST be a "const CSensoryFrame*"
Definition at line 412 of file PF_implementations.h.
◆ prediction_and_update()
|
inherited |
Performs the prediction stage of the Particle Filter.
This method simply selects the appropiate protected method according to the particle filter algorithm to run.
- See also
- prediction_and_update_pfStandardProposal,prediction_and_update_pfAuxiliaryPFStandard,prediction_and_update_pfOptimalProposal,prediction_and_update_pfAuxiliaryPFOptimal
Definition at line 272 of file CParticleFilterCapable.cpp.
References mrpt::bayes::CParticleFilter::TParticleFilterOptions::PF_algorithm, and THROW_EXCEPTION.
◆ prediction_and_update_pfAuxiliaryPFOptimal()
|
protectedvirtual |
Performs the particle filter prediction/update stages for the algorithm "pfAuxiliaryPFOptimal" (if not implemented in heritated class, it will raise a 'non-implemented' exception).
- See also
- prediction_and_update
Reimplemented from mrpt::bayes::CParticleFilterCapable.
Definition at line 139 of file CMultiMetricMapPDF_RBPF.cpp.
References MRPT_END, and MRPT_START.
◆ prediction_and_update_pfAuxiliaryPFStandard()
|
protectedvirtual |
Performs the particle filter prediction/update stages for the algorithm "pfAuxiliaryPFStandard" (if not implemented in heritated class, it will raise a 'non-implemented' exception).
- See also
- prediction_and_update
Reimplemented from mrpt::bayes::CParticleFilterCapable.
Definition at line 154 of file CMultiMetricMapPDF_RBPF.cpp.
References MRPT_END, and MRPT_START.
◆ prediction_and_update_pfOptimalProposal()
|
protectedvirtual |
Performs the particle filter prediction/update stages for the algorithm "pfOptimalProposal" (if not implemented in heritated class, it will raise a 'non-implemented' exception).
- See also
- prediction_and_update
- Todo:
- Add paper ref!
/
COpenGLScene scene; opengl::CSetOfObjects *obj = new opengl::CSetOfObjects(); fusedObsModels.getAs3DObject( *obj ); scene.insert( obj ); CFileStream("debug.3Dscene",fomWrite) << scene; cout << "fusedObsModels # of modes: " << fusedObsModels.m_modes.size() << endl; printf("ESS: %f\n",fusedObsModels.ESS() ); cout << fusedObsModels.getEstimatedCovariance() << endl; mrpt::system::pause(); /
/
CPointPDFSOG newObsModel;
(itBeacs)->generateObservationModelDistribution(
sensedRange,
newObsModel,
beacMap, // The beacon map, for options
itObs->sensorLocationOnRobot,// Sensor location on robot
centerPositionPrior,
centerPositionPriorRadius );
/
- Todo:
- If there are 2+ sensors on the robot, compute phi?
Reimplemented from mrpt::bayes::CParticleFilterCapable.
Definition at line 182 of file CMultiMetricMapPDF_RBPF.cpp.
References mrpt::slam::CMetricMapsAlignmentAlgorithm::Align(), ASSERT_, mrpt::poses::CPointPDFSOG::bayesianFusion(), TAuxRangeMeasInfo::beaconID, mrpt::poses::CPointPDFSOG::begin(), mrpt::obs::CSensoryFrame::begin(), mrpt::poses::CPointPDFSOG::clear(), TAuxRangeMeasInfo::cmp_Asc(), mrpt::poses::CPosePDFGaussian::copyFrom(), mrpt::poses::CPointPDFGaussian::cov, mrpt::poses::CPose3DPDFGaussian::cov, DEG2RAD, mrpt::random::CRandomGenerator::drawGaussianMultivariate(), mrpt::poses::CPoseRandomSampler::drawSample(), mrpt::poses::CPointPDFSOG::drawSingleSample(), mrpt::poses::CPointPDFSOG::end(), mrpt::obs::CSensoryFrame::end(), mrpt::poses::CPointPDFSOG::erase(), mrpt::poses::CPointPDFSOG::ESS(), mrpt::format(), mrpt::obs::CActionCollection::getActionByClass(), mrpt::poses::CPose2DGridTemplate< T >::getAsMatrix(), mrpt::obs::CActionCollection::getBestMovementEstimation(), mrpt::poses::CPose2DGridTemplate< T >::getByIndex(), mrpt::utils::CProbabilityDensityFunction< TDATA, STATE_LEN >::getCovariance(), mrpt::poses::CPointPDFSOG::getMean(), mrpt::poses::CPoseRandomSampler::getOriginalPDFCov2D(), mrpt::poses::CPose2DGridTemplate< T >::getSizeX(), mrpt::poses::CPose2DGridTemplate< T >::getSizeY(), mrpt::slam::CICP::TReturnInfo::goodness, mrpt::poses::CPose2DGridTemplate< T >::idx2x(), mrpt::poses::CPose2DGridTemplate< T >::idx2y(), mrpt::obs::CSensoryFrame::insertObservationsInto(), INVALID_BEACON_ID, IS_CLASS, mrpt::poses::CPoseRandomSampler::isPrepared(), mrpt::utils::keep_max(), mrpt::poses::CPointPDFSOG::TGaussianMode::log_w, mrpt::poses::CPointPDFGaussian::mean, mrpt::poses::CPosePDFGaussian::mean, mrpt::poses::CPose3DPDFGaussian::mean, MRPT_END, MRPT_START, TAuxRangeMeasInfo::nGaussiansInMap, mrpt::poses::CPoseOrPoint< DERIVEDCLASS >::norm(), mrpt::poses::CPosePDFGrid::normalize(), mrpt::bayes::CParticleFilter::TParticleFilterOptions::powFactor, mrpt::poses::CPointPDFSOG::push_back(), mrpt::random::randomGenerator, mrpt::poses::CPointPDFSOG::resize(), mrpt::utils::CImage::saveToFile(), mrpt::obs::CObservationBeaconRanges::sensedData, TAuxRangeMeasInfo::sensedDistance, TAuxRangeMeasInfo::sensorLocationOnRobot, mrpt::poses::CPose3D::setFromValues(), mrpt::poses::CPoseRandomSampler::setPosePDF(), mrpt::poses::CPointPDFSOG::size(), mrpt::math::square(), THROW_EXCEPTION, mrpt::poses::CPosePDFGrid::uniformDistribution(), mrpt::poses::CPointPDFSOG::TGaussianMode::val, val, mrpt::poses::CPoseOrPoint< DERIVEDCLASS >::x(), mrpt::poses::CPoseOrPoint< DERIVEDCLASS >::y(), and mrpt::poses::CPose3D::yaw().
◆ prediction_and_update_pfStandardProposal()
|
protectedvirtual |
Performs the particle filter prediction/update stages for the algorithm "pfStandardProposal" (if not implemented in heritated class, it will raise a 'non-implemented' exception).
- See also
- prediction_and_update
Reimplemented from mrpt::bayes::CParticleFilterCapable.
Definition at line 869 of file CMultiMetricMapPDF_RBPF.cpp.
References MRPT_END, and MRPT_START.
◆ prepareFastDrawSample()
|
inherited |
Prepares data structures for calling fastDrawSample method next.
This method must be called once before using "fastDrawSample" (calling this more than once has no effect, but it takes time for nothing!) The behavior depends on the configuration of the PF (see CParticleFilter::TParticleFilterOptions):
- DYNAMIC SAMPLE SIZE=NO: In this case this method fills out an internal array (m_fastDrawAuxiliary.alreadyDrawnIndexes) with the random indexes generated according to the selected resample scheme in TParticleFilterOptions. Those indexes are read sequentially by subsequent calls to fastDrawSample.
- DYNAMIC SAMPLE SIZE=YES: Then:
- If TParticleFilterOptions.resamplingMethod = prMultinomial, the internal buffers will be filled out (m_fastDrawAuxiliary.CDF, CDF_indexes & PDF) and then fastDrawSample can be called an arbitrary number of times to generate random indexes.
- For the rest of resampling algorithms, an exception will be raised since they are not appropriate for a dynamic (unknown in advance) number of particles.
The function pointed by "partEvaluator" should take into account the particle filter algorithm selected in "m_PFAlgorithm". If called without arguments (defaultEvaluator), the default behavior is to draw samples with a probability proportional to their current weights. The action and the observation are declared as "void*" for a greater flexibility. For a more detailed information see the Particle Filter tutorial. Custom supplied "partEvaluator" functions must take into account the previous particle weight, i.e. multiplying the current observation likelihood by the weights.
- See also
- fastDrawSample
Definition at line 348 of file CParticleFilterCapable.cpp.
References mrpt::bayes::CParticleFilter::TParticleFilterOptions::adaptiveSampleSize, ASSERT_, mrpt::math::maximum(), MRPT_CHECK_NORMAL_NUMBER, MRPT_END, MRPT_END_WITH_CLEAN_UP, MRPT_START, mrpt::bayes::CParticleFilter::TParticleFilterOptions::resamplingMethod, and THROW_EXCEPTION.
Referenced by mrpt::hmtslam::CLSLAM_RBPF_2DLASER::prediction_and_update_pfAuxiliaryPFOptimal().
◆ readFromStream()
|
protectedvirtual |
Introduces a pure virtual method responsible for loading from a CStream This can not be used directly be users, instead use "stream >> object;" for reading it from a stream or "stream >> object_ptr;" if the class is unknown apriori.
- Parameters
-
in The input binary stream where the object data must read from. version The version of the object stored in the stream: use this version number in your code to know how to read the incoming data.
- Exceptions
-
std::exception On any error, see CStream::ReadBuffer
- See also
- CStream
Implements mrpt::utils::CSerializable.
Definition at line 246 of file CMultiMetricMapPDF.cpp.
References MRPT_THROW_UNKNOWN_SERIALIZATION_VERSION, and version.
◆ readParticlesFromStream()
|
inlineinherited |
Reads the sequence of particles and their weights from a stream (requires T implementing CSerializable).
- See also
- writeParticlesToStream
Definition at line 207 of file CParticleFilterData.h.
References mrpt::bayes::CParticleFilterData< T >::clearParticles(), mrpt::bayes::CParticleFilterData< T >::m_particles, MRPT_END, and MRPT_START.
◆ rebuildAverageMap()
|
private |
Rebuild the "expected" grid map.
Used internally, do not call
Definition at line 317 of file CMultiMetricMapPDF.cpp.
References ASSERT_, min, MRPT_END, and MRPT_START.
◆ saveCurrentPathEstimationToTextFile()
| void CMultiMetricMapPDF::saveCurrentPathEstimationToTextFile | ( | const std::string & | fil | ) |
A logging utility: saves the current path estimation for each particle in a text file (a row per particle, each 3-column-entry is a set [x,y,phi], respectively).
Definition at line 601 of file CMultiMetricMapPDF.cpp.
References mrpt::system::os::fclose(), mrpt::system::os::fopen(), and mrpt::system::os::fprintf().
Referenced by mrpt::slam::CMetricMapBuilderRBPF::saveCurrentPathEstimationToTextFile().
◆ setW()
|
inlinevirtualinherited |
Modifies i'th particle (logarithm) weight, where first one is index 0.
Implements mrpt::bayes::CParticleFilterCapable.
Definition at line 44 of file CParticleFilterData.h.
References mrpt::bayes::CParticleFilterDataImpl< Derived, particle_list_t >::derived(), and THROW_EXCEPTION_FMT.
◆ updateSensoryFrameSequence()
| void CMultiMetricMapPDF::updateSensoryFrameSequence | ( | ) |
Update the poses estimation of the member "SFs" according to the current path belief.
Definition at line 576 of file CMultiMetricMapPDF.cpp.
References MRPT_END, and MRPT_START.
Referenced by mrpt::slam::CMetricMapBuilderRBPF::getCurrentlyBuiltMap().
◆ writeParticlesToStream()
|
inlineinherited |
Dumps the sequence of particles and their weights to a stream (requires T implementing CSerializable).
- See also
- readParticlesFromStream
Definition at line 192 of file CParticleFilterData.h.
References mrpt::bayes::CParticleFilterData< T >::m_particles, MRPT_END, and MRPT_START.
◆ writeToMatlab()
|
inlinevirtualinherited |
Introduces a pure virtual method responsible for writing to a mxArray Matlab object, typically a MATLAB struct whose contents are documented in each derived class.
- Returns
- A new
mxArray(caller is responsible of memory freeing) or NULL is class does not support conversion to MATLAB.
Definition at line 79 of file CSerializable.h.
◆ writeToStream()
|
protectedvirtual |
Introduces a pure virtual method responsible for writing to a CStream.
This can not be used directly be users, instead use "stream << object;" for writing it to a stream.
- Parameters
-
out The output binary stream where object must be dumped. getVersion If NULL, the object must be dumped. If not, only the version of the object dump must be returned in this pointer. This enables the versioning of objects dumping and backward compatibility with previously stored data.
- Exceptions
-
std::exception On any error, see CStream::WriteBuffer
- See also
- CStream
Implements mrpt::utils::CSerializable.
Definition at line 220 of file CMultiMetricMapPDF.cpp.
References version.
Friends And Related Function Documentation
◆ mrpt::slam::CMetricMapBuilderRBPF
|
friend |
Definition at line 68 of file maps/CMultiMetricMapPDF.h.
Member Data Documentation
◆ _init_CMultiMetricMapPDF
|
staticprotected |
Definition at line 71 of file maps/CMultiMetricMapPDF.h.
◆ averageMap
|
private |
Internal buffer for the averaged map.
Definition at line 95 of file maps/CMultiMetricMapPDF.h.
◆ averageMapIsUpdated
|
private |
Definition at line 96 of file maps/CMultiMetricMapPDF.h.
◆ classCMultiMetricMapPDF
|
static |
Definition at line 71 of file maps/CMultiMetricMapPDF.h.
◆ classCObject
|
staticinherited |
◆ classCSerializable
|
staticinherited |
Definition at line 42 of file CSerializable.h.
◆ classinfo
|
static |
Definition at line 71 of file maps/CMultiMetricMapPDF.h.
◆ m_accumRobotMovement2D
|
protectedinherited |
Definition at line 55 of file PF_implementations_data.h.
◆ m_accumRobotMovement2DIsValid
|
protectedinherited |
Definition at line 56 of file PF_implementations_data.h.
◆ m_accumRobotMovement3D
|
protectedinherited |
Definition at line 57 of file PF_implementations_data.h.
◆ m_accumRobotMovement3DIsValid
|
protectedinherited |
Definition at line 58 of file PF_implementations_data.h.
◆ m_fastDrawAuxiliary
|
mutableprotectedinherited |
Auxiliary vectors, see CParticleFilterCapable::prepareFastDrawSample for more information.
Definition at line 233 of file CParticleFilterCapable.h.
◆ m_movementDrawer
|
protectedinherited |
Used in al PF implementations.
Definition at line 60 of file PF_implementations_data.h.
◆ m_particles
|
inherited |
The array of particles.
Definition at line 177 of file CParticleFilterData.h.
◆ m_pfAuxiliaryPFOptimal_estimatedProb
|
mutableprotectedinherited |
Auxiliary variable used in the "pfAuxiliaryPFOptimal" algorithm.
Definition at line 61 of file PF_implementations_data.h.
◆ m_pfAuxiliaryPFOptimal_maxLikDrawnMovement
|
mutableprotectedinherited |
Auxiliary variable used in the "pfAuxiliaryPFOptimal" algorithm.
Definition at line 64 of file PF_implementations_data.h.
◆ m_pfAuxiliaryPFOptimal_maxLikelihood
|
mutableprotectedinherited |
Auxiliary variable used in the "pfAuxiliaryPFOptimal" algorithm.
Definition at line 63 of file PF_implementations_data.h.
◆ m_pfAuxiliaryPFOptimal_maxLikMovementDrawHasBeenUsed
|
protectedinherited |
Definition at line 65 of file PF_implementations_data.h.
◆ m_pfAuxiliaryPFStandard_estimatedProb
|
mutableprotectedinherited |
Auxiliary variable used in the "pfAuxiliaryPFStandard" algorithm.
Definition at line 62 of file PF_implementations_data.h.
◆ newInfoIndex
|
private |
An index [0,1] measuring how much information an observation aports to the map (Typ. threshold=0.07)
Definition at line 209 of file maps/CMultiMetricMapPDF.h.
◆ options
| mrpt::maps::CMultiMetricMapPDF::TPredictionParams mrpt::maps::CMultiMetricMapPDF::options |
◆ SF2robotPath
|
private |
A mapping between indexes in the SFs to indexes in the robot paths from particles.
Definition at line 99 of file maps/CMultiMetricMapPDF.h.
◆ SFs
|
private |
The SFs and their corresponding pose estimations.
Definition at line 98 of file maps/CMultiMetricMapPDF.h.
Referenced by mrpt::slam::CMetricMapBuilderRBPF::getCurrentlyBuiltMap(), mrpt::slam::CMetricMapBuilderRBPF::getCurrentlyBuiltMapSize(), and mrpt::slam::CMetricMapBuilderRBPF::processActionObservation().