Detailed Description
template<typename TCELL>
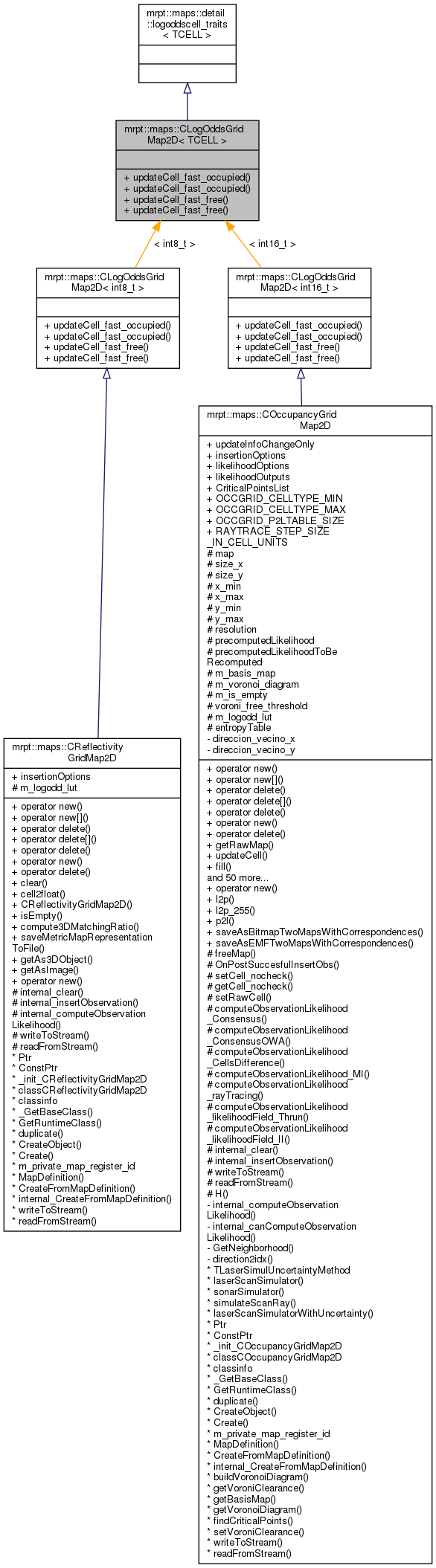
struct mrpt::maps::CLogOddsGridMap2D< TCELL >
A generic provider of log-odds grid-map maintainance functions.
Map cells must be type TCELL, which can be only:
- int8_t or
- int16_t
- See also
- CLogOddsGridMapLUT, See derived classes for usage examples.
Definition at line 50 of file maps/CLogOddsGridMap2D.h.
#include <mrpt/maps/CLogOddsGridMap2D.h>
Public Types | |
| typedef TCELL | cell_t |
| The type of cells. More... | |
| typedef detail::logoddscell_traits< TCELL > | traits_t |
Static Public Member Functions | |
| static void | updateCell_fast_occupied (const unsigned x, const unsigned y, const cell_t logodd_obs, const cell_t thres, cell_t *mapArray, const unsigned _size_x) |
| Performs the Bayesian fusion of a new observation of a cell, without checking for grid limits nor updateInfoChangeOnly. More... | |
| static void | updateCell_fast_occupied (cell_t *theCell, const cell_t logodd_obs, const cell_t thres) |
| Performs the Bayesian fusion of a new observation of a cell, without checking for grid limits nor updateInfoChangeOnly. More... | |
| static void | updateCell_fast_free (const unsigned x, const unsigned y, const cell_t logodd_obs, const cell_t thres, cell_t *mapArray, const unsigned _size_x) |
| Performs the Bayesian fusion of a new observation of a cell, without checking for grid limits nor updateInfoChangeOnly. More... | |
| static void | updateCell_fast_free (cell_t *theCell, const cell_t logodd_obs, const cell_t thres) |
| Performs the Bayesian fusion of a new observation of a cell, without checking for grid limits nor updateInfoChangeOnly. More... | |
Member Typedef Documentation
◆ cell_t
| typedef TCELL mrpt::maps::CLogOddsGridMap2D< TCELL >::cell_t |
The type of cells.
Definition at line 52 of file maps/CLogOddsGridMap2D.h.
◆ traits_t
| typedef detail::logoddscell_traits<TCELL> mrpt::maps::CLogOddsGridMap2D< TCELL >::traits_t |
Definition at line 53 of file maps/CLogOddsGridMap2D.h.
Member Function Documentation
◆ updateCell_fast_free() [1/2]
|
inlinestatic |
Performs the Bayesian fusion of a new observation of a cell, without checking for grid limits nor updateInfoChangeOnly.
This method increases the "free-ness" of a cell, managing possible saturation.
- Parameters
-
x Cell index in X axis. y Cell index in Y axis. logodd_obs Observation of the cell, in log-odd form as transformed by p2l. thres This must be CELLTYPE_MAX-logodd_obs
- See also
- updateCell_fast_occupied
Definition at line 102 of file maps/CLogOddsGridMap2D.h.
◆ updateCell_fast_free() [2/2]
|
inlinestatic |
Performs the Bayesian fusion of a new observation of a cell, without checking for grid limits nor updateInfoChangeOnly.
This method increases the "free-ness" of a cell, managing possible saturation.
- Parameters
-
x Cell index in X axis. y Cell index in Y axis. logodd_obs Observation of the cell, in log-odd form as transformed by p2l. thres This must be CELLTYPE_MAX-logodd_obs
- See also
- updateCell_fast_occupied
Definition at line 124 of file maps/CLogOddsGridMap2D.h.
◆ updateCell_fast_occupied() [1/2]
|
inlinestatic |
Performs the Bayesian fusion of a new observation of a cell, without checking for grid limits nor updateInfoChangeOnly.
This method increases the "occupancy-ness" of a cell, managing possible saturation.
- Parameters
-
x Cell index in X axis. y Cell index in Y axis. logodd_obs Observation of the cell, in log-odd form as transformed by p2l. thres This must be CELLTYPE_MIN+logodd_obs
- See also
- updateCell, updateCell_fast_free
Definition at line 63 of file maps/CLogOddsGridMap2D.h.
◆ updateCell_fast_occupied() [2/2]
|
inlinestatic |
Performs the Bayesian fusion of a new observation of a cell, without checking for grid limits nor updateInfoChangeOnly.
This method increases the "occupancy-ness" of a cell, managing possible saturation.
- Parameters
-
theCell The cell to modify logodd_obs Observation of the cell, in log-odd form as transformed by p2l. thres This must be CELLTYPE_MIN+logodd_obs
- See also
- updateCell, updateCell_fast_free
Definition at line 84 of file maps/CLogOddsGridMap2D.h.