Detailed Description
"Fake navigator" for tests: it just sends out a pre-programmed sequence of commands to the robot.
For a short discussion of the API, see CNavigatorVirtualBase
Definition at line 21 of file CNavigatorManualSequence.h.
#include <mrpt/nav/reactive/CNavigatorManualSequence.h>

Classes | |
| struct | TVelCmd |
Public Member Functions | |
| CNavigatorManualSequence (CRobot2NavInterface &react_iterf_impl) | |
| virtual | ~CNavigatorManualSequence () |
| void | navigationStep () override |
| Overriden in this class to ignore the cancel/pause/... More... | |
| const mrpt::system::CTimeLogger & | getDelaysTimeLogger () const |
| Gives access to a const-ref to the internal time logger used to estimate delays. More... | |
Initialization API | |
| virtual void | loadConfigFile (const mrpt::config::CConfigFileBase &c) override |
| Loads all params from a file. More... | |
| virtual void | saveConfigFile (mrpt::config::CConfigFileBase &c) const override |
| Saves all current options to a config file. More... | |
| void | initialize () override |
| Must be called for loading collision grids, etc. More... | |
Static Public Member Functions | |
| static std::array< mrpt::system::TConsoleColor, NUMBER_OF_VERBOSITY_LEVELS > & | logging_levels_to_colors () |
| Map from VerbosityLevels to their corresponding mrpt::system::TConsoleColor. More... | |
| static std::array< std::string, NUMBER_OF_VERBOSITY_LEVELS > & | logging_levels_to_names () |
| Map from VerbosityLevels to their corresponding names. More... | |
Public Attributes | |
| std::map< double, TVelCmd > | programmed_orders |
| map [time_in_secs_since_beginning] -> orders. More... | |
| TAbstractNavigatorParams | params_abstract_navigator |
Protected Member Functions | |
| virtual void | onStartNewNavigation () override |
| Called whenever a new navigation has been started. More... | |
| void | dispatchPendingNavEvents () |
| virtual void | onNavigateCommandReceived () |
| Called after each call to CAbstractNavigator::navigate() More... | |
| void | updateCurrentPoseAndSpeeds () |
| Call to the robot getCurrentPoseAndSpeeds() and updates members m_curPoseVel accordingly. More... | |
| virtual void | performNavigationStepNavigating (bool call_virtual_nav_method=true) |
| Factorization of the part inside navigationStep(), for the case of state being NAVIGATING. More... | |
| void | processNavigateCommand (const TNavigationParams *params) |
| Does the job of navigate(), except the call to onNavigateCommandReceived() More... | |
| void | doEmergencyStop (const std::string &msg) |
| Stops the robot and set navigation state to error. More... | |
| virtual bool | changeSpeeds (const mrpt::kinematics::CVehicleVelCmd &vel_cmd) |
| Default: forward call to m_robot.changeSpeed(). More... | |
| virtual bool | changeSpeedsNOP () |
| Default: forward call to m_robot.changeSpeedsNOP(). More... | |
| virtual bool | stop (bool isEmergencyStop) |
| Default: forward call to m_robot.stop(). More... | |
| virtual bool | checkHasReachedTarget (const double targetDist) const |
| Default implementation: check if target_dist is below the accepted distance. More... | |
| virtual bool | checkCollisionWithLatestObstacles (const mrpt::math::TPose2D &relative_robot_pose) const |
| Checks whether the robot shape, when placed at the given pose (relative to the current pose), is colliding with any of the latest known obstacles. More... | |
Protected Attributes | |
| std::vector< std::function< void(void)> > | m_pending_events |
| Events generated during navigationStep(), enqueued to be called at the end of the method execution to avoid user code to change the navigator state. More... | |
| TState | m_navigationState |
| Current internal state of navigator: More... | |
| std::unique_ptr< TNavigationParams > | m_navigationParams |
| Current navigation parameters. More... | |
| CRobot2NavInterface & | m_robot |
| The navigator-robot interface. More... | |
| std::weak_ptr< mrpt::poses::FrameTransformer< 2 > > | m_frame_tf |
| Optional, user-provided frame transformer. More... | |
| std::recursive_mutex | m_nav_cs |
| mutex for all navigation methods More... | |
| TRobotPoseVel | m_curPoseVel |
| Current robot pose (updated in CAbstractNavigator::navigationStep() ) More... | |
| double | m_last_curPoseVelUpdate_robot_time |
| std::string | m_last_curPoseVelUpdate_pose_frame_id |
| mrpt::poses::CPose2DInterpolator | m_latestPoses |
| Latest robot poses (updated in CAbstractNavigator::navigationStep() ) More... | |
| mrpt::poses::CPose2DInterpolator | m_latestOdomPoses |
| mrpt::system::CTimeLogger | m_timlog_delays |
| Time logger to collect delay-related stats. More... | |
| double | m_badNavAlarm_minDistTarget |
| For sending an alarm (error event) when it seems that we are not approaching toward the target in a while... More... | |
| mrpt::system::TTimeStamp | m_badNavAlarm_lastMinDistTime |
| VerbosityLevel | m_min_verbosity_level |
| Provided messages with VerbosityLevel smaller than this value shall be ignored. More... | |
Private Member Functions | |
| virtual void | navigate (const TNavigationParams *params) override |
| Navigation request to a single target location. More... | |
| virtual void | performNavigationStep () override |
| To be implemented in derived classes. More... | |
Navigation control API | |
| virtual void | cancel () |
| Cancel current navegation. More... | |
| virtual void | resume () |
| Continues with suspended navigation. More... | |
| virtual void | suspend () |
| Suspend current navegation. More... | |
| virtual void | resetNavError () |
Resets a NAV_ERROR state back to IDLE More... | |
| TState | getCurrentState () const |
| Returns the current navigator state. More... | |
| void | setFrameTF (const std::weak_ptr< mrpt::poses::FrameTransformer< 2 >> &frame_tf) |
Sets a user-provided frame transformer object; used only if providing targets in a frame ID different than the one in which robot odometry is given (both IDs default to "map"). More... | |
| std::weak_ptr< mrpt::poses::FrameTransformer< 2 > > | getFrameTF () const |
| Get the current frame tf object (defaults to nullptr) More... | |
| enum | TState { IDLE = 0, NAVIGATING, SUSPENDED, NAV_ERROR } |
| The different states for the navigation system. More... | |
Logging methods | |
| bool | logging_enable_console_output |
| [Default=true] Set it to false in case you don't want the logged messages to be dumped to the output automatically. More... | |
| bool | logging_enable_keep_record |
| [Default=false] Enables storing all messages into an internal list. More... | |
| void | logStr (const VerbosityLevel level, const std::string &msg_str) const |
| Main method to add the specified message string to the logger. More... | |
| void | logFmt (const VerbosityLevel level, const char *fmt,...) const MRPT_printf_format_check(3 |
| Alternative logging method, which mimics the printf behavior. More... | |
| void void | logCond (const VerbosityLevel level, bool cond, const std::string &msg_str) const |
| Log the given message only if the condition is satisfied. More... | |
| void | setLoggerName (const std::string &name) |
| Set the name of the COutputLogger instance. More... | |
| std::string | getLoggerName () const |
| Return the name of the COutputLogger instance. More... | |
| void | setMinLoggingLevel (const VerbosityLevel level) |
| Set the minimum logging level for which the incoming logs are going to be taken into account. More... | |
| void | setVerbosityLevel (const VerbosityLevel level) |
| alias of setMinLoggingLevel() More... | |
| VerbosityLevel | getMinLoggingLevel () const |
| bool | isLoggingLevelVisible (VerbosityLevel level) const |
| void | getLogAsString (std::string &log_contents) const |
| Fill the provided string with the contents of the logger's history in std::string representation. More... | |
| std::string | getLogAsString () const |
| Get the history of COutputLogger instance in a string representation. More... | |
| void | writeLogToFile (const std::string *fname_in=NULL) const |
| Write the contents of the COutputLogger instance to an external file. More... | |
| void | dumpLogToConsole () const |
| Dump the current contents of the COutputLogger instance in the terminal window. More... | |
| std::string | getLoggerLastMsg () const |
| Return the last Tmsg instance registered in the logger history. More... | |
| void | getLoggerLastMsg (std::string &msg_str) const |
| Fill inputtted string with the contents of the last message in history. More... | |
| void | loggerReset () |
| Reset the contents of the logger instance. More... | |
| void | logRegisterCallback (output_logger_callback_t userFunc) |
| bool | logDeregisterCallback (output_logger_callback_t userFunc) |
Member Enumeration Documentation
◆ TState
|
inherited |
The different states for the navigation system.
| Enumerator | |
|---|---|
| IDLE | |
| NAVIGATING | |
| SUSPENDED | |
| NAV_ERROR | |
Definition at line 170 of file CAbstractNavigator.h.
Constructor & Destructor Documentation
◆ CNavigatorManualSequence()
| CNavigatorManualSequence::CNavigatorManualSequence | ( | CRobot2NavInterface & | react_iterf_impl | ) |
Definition at line 20 of file CNavigatorManualSequence.cpp.
◆ ~CNavigatorManualSequence()
|
virtual |
Definition at line 27 of file CNavigatorManualSequence.cpp.
Member Function Documentation
◆ cancel()
|
virtualinherited |
Cancel current navegation.
Reimplemented in mrpt::nav::CWaypointsNavigator.
Definition at line 113 of file CAbstractNavigator.cpp.
References mrpt::nav::CAbstractNavigator::IDLE, mrpt::nav::CAbstractNavigator::m_nav_cs, mrpt::nav::CAbstractNavigator::m_navigationState, MRPT_LOG_DEBUG, and mrpt::nav::CAbstractNavigator::stop().
Referenced by mrpt::nav::CWaypointsNavigator::cancel().

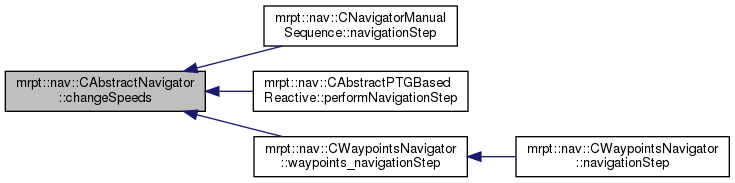
◆ changeSpeeds()
|
protectedvirtualinherited |
Default: forward call to m_robot.changeSpeed().
Can be overriden.
Definition at line 412 of file CAbstractNavigator.cpp.
References mrpt::nav::CRobot2NavInterface::changeSpeeds(), and mrpt::nav::CAbstractNavigator::m_robot.
Referenced by navigationStep(), mrpt::nav::CAbstractPTGBasedReactive::performNavigationStep(), and mrpt::nav::CWaypointsNavigator::waypoints_navigationStep().
◆ changeSpeedsNOP()
|
protectedvirtualinherited |
Default: forward call to m_robot.changeSpeedsNOP().
Can be overriden.
Definition at line 418 of file CAbstractNavigator.cpp.
References mrpt::nav::CRobot2NavInterface::changeSpeedsNOP(), and mrpt::nav::CAbstractNavigator::m_robot.
Referenced by mrpt::nav::CAbstractPTGBasedReactive::performNavigationStep().

◆ checkCollisionWithLatestObstacles()
|
protectedvirtualinherited |
Checks whether the robot shape, when placed at the given pose (relative to the current pose), is colliding with any of the latest known obstacles.
Default implementation: always returns false.
Reimplemented in mrpt::nav::CReactiveNavigationSystem3D, and mrpt::nav::CReactiveNavigationSystem.
Definition at line 663 of file CAbstractNavigator.cpp.
Referenced by mrpt::nav::CAbstractNavigator::performNavigationStepNavigating().
◆ checkHasReachedTarget()
|
protectedvirtualinherited |
Default implementation: check if target_dist is below the accepted distance.
If true is returned here, the end-of-navigation event will be sent out (only for non-intermediary targets).
Reimplemented in mrpt::nav::CWaypointsNavigator.
Definition at line 479 of file CAbstractNavigator.cpp.
Referenced by mrpt::nav::CAbstractNavigator::performNavigationStepNavigating().

◆ dispatchPendingNavEvents()
|
protectedinherited |
Definition at line 249 of file CAbstractNavigator.cpp.
References mrpt::nav::CAbstractNavigator::m_pending_events.
Referenced by mrpt::nav::CWaypointsNavigator::navigationStep(), and mrpt::nav::CAbstractNavigator::navigationStep().

◆ doEmergencyStop()
|
protectedinherited |
Stops the robot and set navigation state to error.
Definition at line 260 of file CAbstractNavigator.cpp.
References mrpt::nav::CAbstractNavigator::m_navigationState, MRPT_LOG_ERROR, mrpt::nav::CAbstractNavigator::NAV_ERROR, and mrpt::nav::CAbstractNavigator::stop().
Referenced by mrpt::nav::CAbstractPTGBasedReactive::performNavigationStep().

◆ dumpLogToConsole()
|
inherited |
Dump the current contents of the COutputLogger instance in the terminal window.
- See also
- writeToFile
Definition at line 190 of file COutputLogger.cpp.
◆ getCurrentState()
|
inlineinherited |
Returns the current navigator state.
Definition at line 179 of file CAbstractNavigator.h.
References mrpt::nav::CAbstractNavigator::m_navigationState.
◆ getDelaysTimeLogger()
|
inlineinherited |
Gives access to a const-ref to the internal time logger used to estimate delays.
- See also
- getTimeLogger() in derived classes
Definition at line 223 of file CAbstractNavigator.h.
References mrpt::nav::CAbstractNavigator::m_timlog_delays.
◆ getFrameTF()
|
inlineinherited |
Get the current frame tf object (defaults to nullptr)
- See also
- setFrameTF
Definition at line 189 of file CAbstractNavigator.h.
References mrpt::nav::CAbstractNavigator::m_frame_tf.
◆ getLogAsString() [1/2]
|
inherited |
Fill the provided string with the contents of the logger's history in std::string representation.
Definition at line 154 of file COutputLogger.cpp.
◆ getLogAsString() [2/2]
|
inherited |
Get the history of COutputLogger instance in a string representation.
Definition at line 159 of file COutputLogger.cpp.
Referenced by mrpt::graphslam::deciders::CICPCriteriaNRD< GRAPH_T >::getDescriptiveReport().
◆ getLoggerLastMsg() [1/2]
|
inherited |
Return the last Tmsg instance registered in the logger history.
Definition at line 195 of file COutputLogger.cpp.
References mrpt::system::COutputLogger::TMsg::getAsString().
◆ getLoggerLastMsg() [2/2]
|
inherited |
Fill inputtted string with the contents of the last message in history.
Definition at line 201 of file COutputLogger.cpp.
◆ getLoggerName()
|
inherited |
Return the name of the COutputLogger instance.
- See also
- setLoggerName
Definition at line 143 of file COutputLogger.cpp.
◆ getMinLoggingLevel()
|
inlineinherited |
- See also
- setMinLoggingLevel
Definition at line 200 of file system/COutputLogger.h.
References mrpt::system::COutputLogger::m_min_verbosity_level.
Referenced by mrpt::maps::CRandomFieldGridMap2D::isEnabledVerbose(), and mrpt::slam::CMetricMapBuilderRBPF::processActionObservation().
◆ initialize()
Must be called for loading collision grids, etc.
before invoking any navigation command
Implements mrpt::nav::CAbstractNavigator.
Definition at line 79 of file CNavigatorManualSequence.cpp.
References ASSERT_, mrpt::nav::CAbstractNavigator::m_robot, programmed_orders, and mrpt::nav::CRobot2NavInterface::resetNavigationTimer().
◆ isLoggingLevelVisible()
|
inlineinherited |
Definition at line 201 of file system/COutputLogger.h.
References mrpt::system::COutputLogger::m_min_verbosity_level.
Referenced by mrpt::slam::CMetricMapBuilderRBPF::processActionObservation(), and mrpt::system::COutputLoggerStreamWrapper::~COutputLoggerStreamWrapper().
◆ loadConfigFile()
|
overridevirtual |
Loads all params from a file.
To be called before initialize(). Each derived class MUST load its own parameters, and then call ITS PARENT'S overriden method to ensure all params are loaded.
Reimplemented from mrpt::nav::CAbstractNavigator.
Definition at line 33 of file CNavigatorManualSequence.cpp.
References ASSERTMSG_, mrpt::nav::CNavigatorManualSequence::TVelCmd::cmd_vel, mrpt::make_aligned_shared(), programmed_orders, THROW_EXCEPTION, and mrpt::system::tokenize().
◆ logCond()
|
inherited |
Log the given message only if the condition is satisfied.
- See also
- log, logFmt
Definition at line 131 of file COutputLogger.cpp.
◆ logDeregisterCallback()
|
inherited |
- Returns
- true if an entry was found and deleted.
Definition at line 290 of file COutputLogger.cpp.
References getAddress(), and mrpt::system::COutputLogger::m_listCallbacks.
◆ logFmt()
|
inherited |
Alternative logging method, which mimics the printf behavior.
Handy for not having to first use mrpt::format to pass a std::string message to logStr
Definition at line 91 of file COutputLogger.cpp.
Referenced by mrpt::graphslam::deciders::CICPCriteriaNRD< GRAPH_T >::CICPCriteriaNRD(), mrpt::hmtslam::CTopLCDetector_GridMatching::computeTopologicalObservationModel(), CGraphSlamHandler< GRAPH_T >::execute(), mrpt::math::CLevenbergMarquardtTempl< VECTORTYPE, USERPARAM >::execute(), CGraphSlamHandler< GRAPH_T >::initOutputDir(), CGraphSlamHandler< GRAPH_T >::initVisualization(), navigationStep(), mrpt::nav::CAbstractNavigator::performNavigationStepNavigating(), CGraphSlamHandler< GRAPH_T >::readConfigFname(), CGraphSlamHandler< GRAPH_T >::saveResults(), CGraphSlamHandler< GRAPH_T >::setResultsDirName(), mrpt::nav::CReactiveNavigationSystem::STEP1_InitPTGs(), and CGraphSlamHandler< GRAPH_T >::~CGraphSlamHandler().
◆ loggerReset()
|
inherited |
Reset the contents of the logger instance.
Called upon construction.
Definition at line 206 of file COutputLogger.cpp.
References mrpt::system::LVL_INFO.
◆ logging_levels_to_colors()
|
staticinherited |
Map from VerbosityLevels to their corresponding mrpt::system::TConsoleColor.
Handy for coloring the input based on the verbosity of the message
Definition at line 47 of file COutputLogger.cpp.
References logging_levels_to_colors.
Referenced by mrpt::system::COutputLogger::TMsg::dumpToConsole().
◆ logging_levels_to_names()
|
staticinherited |
Map from VerbosityLevels to their corresponding names.
Handy for printing the current message VerbosityLevel along with the actual content
Definition at line 60 of file COutputLogger.cpp.
References logging_levels_to_names.
Referenced by mrpt::system::COutputLogger::TMsg::getAsString().
◆ logRegisterCallback()
|
inherited |
Definition at line 277 of file COutputLogger.cpp.
References mrpt::system::COutputLogger::m_listCallbacks.
◆ logStr()
|
inherited |
Main method to add the specified message string to the logger.
Definition at line 72 of file COutputLogger.cpp.
References mrpt::system::COutputLogger::TMsg::body, mrpt::system::COutputLogger::TMsg::dumpToConsole(), mrpt::system::COutputLogger::TMsg::level, mrpt::system::COutputLogger::TMsg::name, and mrpt::system::COutputLogger::TMsg::timestamp.
Referenced by mrpt::slam::PF_implementation< mrpt::math::TPose3D, CMonteCarloLocalization3D, mrpt::bayes::particle_storage_mode::VALUE >::PF_SLAM_implementation_pfAuxiliaryPFStandardAndOptimal(), mrpt::nav::CReactiveNavigationSystem::STEP1_InitPTGs(), and mrpt::system::COutputLoggerStreamWrapper::~COutputLoggerStreamWrapper().
◆ navigate()
|
inlineoverrideprivatevirtual |
Navigation request to a single target location.
It starts a new navigation.
- Parameters
-
[in] params Pointer to structure with navigation info (its contents will be copied, so the original can be freely destroyed upon return if it was dynamically allocated.)
- Note
- A pointer is used so the passed object can be polymorphic with derived types.
Reimplemented from mrpt::nav::CAbstractNavigator.
Definition at line 55 of file CNavigatorManualSequence.h.
◆ navigationStep()
|
overridevirtual |
Overriden in this class to ignore the cancel/pause/...
commands
Reimplemented from mrpt::nav::CAbstractNavigator.
Definition at line 86 of file CNavigatorManualSequence.cpp.
References mrpt::nav::CAbstractNavigator::changeSpeeds(), mrpt::nav::CNavigatorManualSequence::TVelCmd::cmd_vel, mrpt::nav::CRobot2NavInterface::getNavigationTime(), mrpt::system::COutputLogger::logFmt(), mrpt::system::LVL_DEBUG, mrpt::system::LVL_ERROR, mrpt::nav::CAbstractNavigator::m_robot, programmed_orders, and mrpt::nav::CAbstractNavigator::stop().
◆ onNavigateCommandReceived()
|
protectedvirtualinherited |
Called after each call to CAbstractNavigator::navigate()
Reimplemented in mrpt::nav::CWaypointsNavigator.
Definition at line 273 of file CAbstractNavigator.cpp.
References mrpt::nav::CAbstractNavigator::m_nav_cs, mrpt::nav::CAbstractNavigator::m_navigationEndEventSent, and mrpt::nav::CAbstractNavigator::m_navigationParams.
Referenced by mrpt::nav::CAbstractNavigator::navigate(), and mrpt::nav::CWaypointsNavigator::onNavigateCommandReceived().
◆ onStartNewNavigation()
|
inlineoverrideprotectedvirtual |
Called whenever a new navigation has been started.
Can be used to reset state variables, etc.
Implements mrpt::nav::CAbstractNavigator.
Definition at line 52 of file CNavigatorManualSequence.h.
◆ performNavigationStep()
|
inlineoverrideprivatevirtual |
To be implemented in derived classes.
Implements mrpt::nav::CAbstractNavigator.
Definition at line 56 of file CNavigatorManualSequence.h.
◆ performNavigationStepNavigating()
|
protectedvirtualinherited |
Factorization of the part inside navigationStep(), for the case of state being NAVIGATING.
Performs house-hold tasks like raising events in case of starting/ending navigation, timeout reaching destination, etc. call_virtual_nav_method can be set to false to avoid calling the virtual method performNavigationStep()
Definition at line 494 of file CAbstractNavigator.cpp.
References ASSERT_, mrpt::nav::CAbstractNavigator::checkCollisionWithLatestObstacles(), mrpt::nav::CAbstractNavigator::checkHasReachedTarget(), mrpt::nav::CAbstractNavigator::TAbstractNavigatorParams::dist_check_target_is_blocked, mrpt::nav::CAbstractNavigator::TAbstractNavigatorParams::dist_to_target_for_sending_event, mrpt::math::TSegment2D::distance(), mrpt::poses::CPoseInterpolatorBase< DIM >::empty(), mrpt::format(), mrpt::system::getCurrentTime(), mrpt::nav::CAbstractNavigator::TAbstractNavigatorParams::hysteresis_check_target_is_blocked, mrpt::nav::CAbstractNavigator::IDLE, mrpt::nav::CAbstractNavigator::internal_onStartNewNavigation(), mrpt::system::COutputLogger::logFmt(), mrpt::system::LVL_WARN, mrpt::nav::CAbstractNavigator::m_badNavAlarm_lastMinDistTime, mrpt::nav::CAbstractNavigator::m_badNavAlarm_minDistTarget, mrpt::nav::CAbstractNavigator::m_counter_check_target_is_blocked, mrpt::nav::CAbstractNavigator::m_curPoseVel, mrpt::nav::CAbstractNavigator::m_lastNavigationState, mrpt::nav::CAbstractNavigator::m_latestPoses, mrpt::nav::CAbstractNavigator::m_navigationEndEventSent, mrpt::nav::CAbstractNavigator::m_navigationParams, mrpt::nav::CAbstractNavigator::m_navigationState, mrpt::nav::CAbstractNavigator::m_pending_events, mrpt::nav::CAbstractNavigator::m_robot, MRPT_LOG_DEBUG, MRPT_LOG_ERROR, MRPT_LOG_ERROR_FMT, MRPT_LOG_INFO, MRPT_LOG_THROTTLE_WARN, MRPT_LOG_WARN, mrpt::nav::CAbstractNavigator::NAV_ERROR, mrpt::nav::CAbstractNavigator::NAVIGATING, mrpt::nav::CAbstractNavigator::params_abstract_navigator, mrpt::nav::CAbstractNavigator::performNavigationStep(), mrpt::nav::CAbstractNavigator::TRobotPoseVel::pose, mrpt::poses::CPoseInterpolatorBase< DIM >::rbegin(), mrpt::nav::CRobot2NavInterface::sendNavigationEndEvent(), mrpt::nav::CRobot2NavInterface::sendNavigationStartEvent(), mrpt::nav::CRobot2NavInterface::sendWaySeemsBlockedEvent(), mrpt::poses::CPoseInterpolatorBase< DIM >::size(), mrpt::nav::CAbstractNavigator::stop(), mrpt::system::timeDifference(), and mrpt::nav::CAbstractNavigator::updateCurrentPoseAndSpeeds().
Referenced by mrpt::nav::CAbstractNavigator::navigationStep(), and mrpt::nav::CWaypointsNavigator::waypoints_navigationStep().

◆ processNavigateCommand()
|
protectedinherited |
Does the job of navigate(), except the call to onNavigateCommandReceived()
Definition at line 281 of file CAbstractNavigator.cpp.
References ASSERT_, mrpt::system::getCurrentTime(), mrpt::nav::CAbstractNavigator::m_badNavAlarm_lastMinDistTime, mrpt::nav::CAbstractNavigator::m_badNavAlarm_minDistTarget, mrpt::nav::CAbstractNavigator::m_curPoseVel, mrpt::nav::CAbstractNavigator::m_nav_cs, mrpt::nav::CAbstractNavigator::m_navigationParams, mrpt::nav::CAbstractNavigator::m_navigationState, MRPT_END, MRPT_START, mrpt::nav::CAbstractNavigator::NAVIGATING, mrpt::nav::CAbstractNavigator::TRobotPoseVel::pose, and mrpt::nav::CAbstractNavigator::updateCurrentPoseAndSpeeds().
Referenced by mrpt::nav::CAbstractNavigator::navigate(), and mrpt::nav::CWaypointsNavigator::waypoints_navigationStep().
◆ resetNavError()
|
virtualinherited |
Resets a NAV_ERROR state back to IDLE
Definition at line 145 of file CAbstractNavigator.cpp.
References mrpt::nav::CAbstractNavigator::IDLE, mrpt::nav::CAbstractNavigator::m_nav_cs, mrpt::nav::CAbstractNavigator::m_navigationState, MRPT_LOG_DEBUG, and mrpt::nav::CAbstractNavigator::NAV_ERROR.
◆ resume()
|
virtualinherited |
Continues with suspended navigation.
- See also
- suspend
Definition at line 122 of file CAbstractNavigator.cpp.
References mrpt::nav::CAbstractNavigator::m_nav_cs, mrpt::nav::CAbstractNavigator::m_navigationState, MRPT_LOG_DEBUG, mrpt::nav::CAbstractNavigator::NAVIGATING, and mrpt::nav::CAbstractNavigator::SUSPENDED.
◆ saveConfigFile()
|
overridevirtual |
Saves all current options to a config file.
Each derived class MUST save its own parameters, and then call ITS PARENT'S overriden method to ensure all params are saved.
Reimplemented from mrpt::nav::CAbstractNavigator.
Definition at line 28 of file CNavigatorManualSequence.cpp.
◆ setFrameTF()
|
inherited |
Sets a user-provided frame transformer object; used only if providing targets in a frame ID different than the one in which robot odometry is given (both IDs default to "map").
Definition at line 153 of file CAbstractNavigator.cpp.
References mrpt::nav::CAbstractNavigator::m_frame_tf.
◆ setLoggerName()
|
inherited |
Set the name of the COutputLogger instance.
- See also
- getLoggerName
Definition at line 138 of file COutputLogger.cpp.
Referenced by mrpt::slam::CMetricMapBuilderICP::CMetricMapBuilderICP(), mrpt::slam::CMetricMapBuilderRBPF::CMetricMapBuilderRBPF(), mrpt::slam::CMonteCarloLocalization2D::CMonteCarloLocalization2D(), mrpt::slam::CMonteCarloLocalization3D::CMonteCarloLocalization3D(), and mrpt::graphslam::CWindowManager::initCWindowManager().
◆ setMinLoggingLevel()
|
inherited |
Set the minimum logging level for which the incoming logs are going to be taken into account.
String messages with specified VerbosityLevel smaller than the min, will not be outputted to the screen and neither will a record of them be stored in by the COutputLogger instance
Definition at line 144 of file COutputLogger.cpp.
Referenced by mrpt::maps::CRandomFieldGridMap2D::enableVerbose(), mrpt::math::CLevenbergMarquardtTempl< VECTORTYPE, USERPARAM >::execute(), mrpt::hwdrivers::CHokuyoURG::initialize(), and mrpt::graphslam::deciders::CICPCriteriaNRD< GRAPH_T >::loadParams().
◆ setVerbosityLevel()
|
inherited |
alias of setMinLoggingLevel()
Definition at line 149 of file COutputLogger.cpp.
Referenced by mrpt::nav::CAbstractNavigator::CAbstractNavigator(), mrpt::slam::CMetricMapBuilderRBPF::CMetricMapBuilderRBPF(), mrpt::comms::CServerTCPSocket::CServerTCPSocket(), mrpt::slam::CMetricMapBuilderRBPF::processActionObservation(), and mrpt::math::ransac_detect_2D_lines().
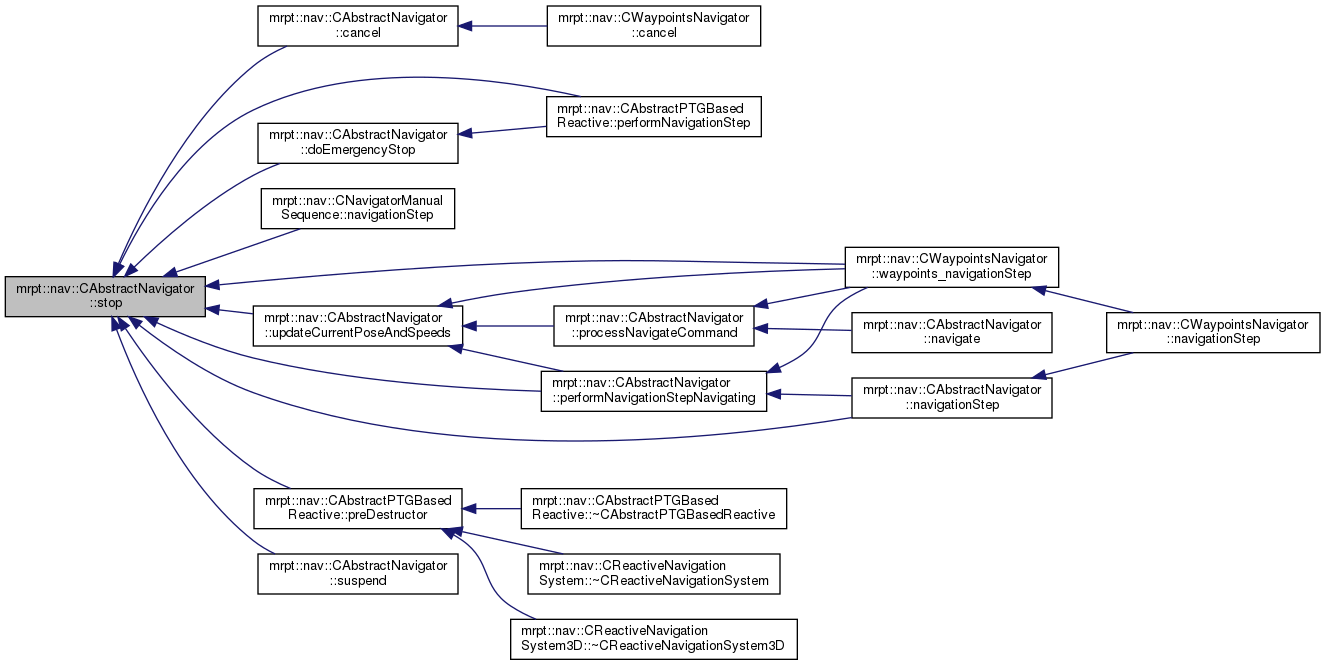
◆ stop()
|
protectedvirtualinherited |
Default: forward call to m_robot.stop().
Can be overriden.
Definition at line 420 of file CAbstractNavigator.cpp.
References mrpt::nav::CAbstractNavigator::m_robot, and mrpt::nav::CRobot2NavInterface::stop().
Referenced by mrpt::nav::CAbstractNavigator::cancel(), mrpt::nav::CAbstractNavigator::doEmergencyStop(), navigationStep(), mrpt::nav::CAbstractNavigator::navigationStep(), mrpt::nav::CAbstractPTGBasedReactive::performNavigationStep(), mrpt::nav::CAbstractNavigator::performNavigationStepNavigating(), mrpt::nav::CAbstractPTGBasedReactive::preDestructor(), mrpt::nav::CAbstractNavigator::suspend(), mrpt::nav::CAbstractNavigator::updateCurrentPoseAndSpeeds(), and mrpt::nav::CWaypointsNavigator::waypoints_navigationStep().
◆ suspend()
|
virtualinherited |
Suspend current navegation.
- See also
- resume
Definition at line 131 of file CAbstractNavigator.cpp.
References mrpt::nav::CAbstractNavigator::m_nav_cs, mrpt::nav::CAbstractNavigator::m_navigationState, MRPT_LOG_DEBUG, mrpt::nav::CAbstractNavigator::NAVIGATING, mrpt::nav::CAbstractNavigator::stop(), and mrpt::nav::CAbstractNavigator::SUSPENDED.
◆ updateCurrentPoseAndSpeeds()
|
protectedinherited |
Call to the robot getCurrentPoseAndSpeeds() and updates members m_curPoseVel accordingly.
If an error is returned by the user callback, first, it calls robot.stop() ,then throws an std::runtime_error exception.
Definition at line 323 of file CAbstractNavigator.cpp.
References mrpt::poses::CPoseInterpolatorBase< DIM >::begin(), mrpt::poses::CPoseInterpolatorBase< DIM >::clear(), mrpt::poses::CPoseInterpolatorBase< DIM >::erase(), mrpt::nav::CRobot2NavInterface::getCurrentPoseAndSpeeds(), mrpt::nav::CRobot2NavInterface::getNavigationTime(), mrpt::poses::CPoseInterpolatorBase< DIM >::insert(), mrpt::nav::CAbstractNavigator::m_curPoseVel, mrpt::nav::CAbstractNavigator::m_last_curPoseVelUpdate_pose_frame_id, mrpt::nav::CAbstractNavigator::m_last_curPoseVelUpdate_robot_time, mrpt::nav::CAbstractNavigator::m_latestOdomPoses, mrpt::nav::CAbstractNavigator::m_latestPoses, mrpt::nav::CAbstractNavigator::m_navigationState, mrpt::nav::CAbstractNavigator::m_robot, mrpt::nav::CAbstractNavigator::m_timlog_delays, MRPT_LOG_ERROR, MRPT_LOG_THROTTLE_DEBUG_FMT, mrpt::nav::CAbstractNavigator::NAV_ERROR, mrpt::math::TPose2D::phi, mrpt::nav::CAbstractNavigator::TRobotPoseVel::pose, mrpt::nav::CAbstractNavigator::TRobotPoseVel::pose_frame_id, PREVIOUS_POSES_MAX_AGE, mrpt::nav::CAbstractNavigator::TRobotPoseVel::rawOdometry, mrpt::poses::CPoseInterpolatorBase< DIM >::rbegin(), mrpt::math::TTwist2D::rotate(), mrpt::poses::CPoseInterpolatorBase< DIM >::size(), mrpt::nav::CAbstractNavigator::stop(), mrpt::system::timeDifference(), mrpt::nav::CAbstractNavigator::TRobotPoseVel::timestamp, mrpt::nav::CAbstractNavigator::TRobotPoseVel::velGlobal, and mrpt::nav::CAbstractNavigator::TRobotPoseVel::velLocal.
Referenced by mrpt::nav::CAbstractNavigator::performNavigationStepNavigating(), mrpt::nav::CAbstractNavigator::processNavigateCommand(), and mrpt::nav::CWaypointsNavigator::waypoints_navigationStep().
◆ writeLogToFile()
|
inherited |
Write the contents of the COutputLogger instance to an external file.
Upon call to this method, COutputLogger dumps the contents of all the logged commands so far to the specified external file. By default the filename is set to ${LOGGERNAME}.log except if the fname parameter is provided
- See also
- dumpToConsole, getAsString
Definition at line 165 of file COutputLogger.cpp.
References ASSERTMSG_, and mrpt::format().
Member Data Documentation
◆ logging_enable_console_output
|
inherited |
[Default=true] Set it to false in case you don't want the logged messages to be dumped to the output automatically.
Definition at line 239 of file system/COutputLogger.h.
◆ logging_enable_keep_record
|
inherited |
[Default=false] Enables storing all messages into an internal list.
- See also
- writeLogToFile, getLogAsString
Definition at line 242 of file system/COutputLogger.h.
◆ m_badNavAlarm_lastMinDistTime
|
protectedinherited |
Definition at line 342 of file CAbstractNavigator.h.
Referenced by mrpt::nav::CAbstractNavigator::performNavigationStepNavigating(), and mrpt::nav::CAbstractNavigator::processNavigateCommand().
◆ m_badNavAlarm_minDistTarget
|
protectedinherited |
For sending an alarm (error event) when it seems that we are not approaching toward the target in a while...
Definition at line 341 of file CAbstractNavigator.h.
Referenced by mrpt::nav::CAbstractNavigator::performNavigationStepNavigating(), and mrpt::nav::CAbstractNavigator::processNavigateCommand().
◆ m_curPoseVel
|
protectedinherited |
Current robot pose (updated in CAbstractNavigator::navigationStep() )
Definition at line 330 of file CAbstractNavigator.h.
Referenced by mrpt::nav::CAbstractPTGBasedReactive::build_movement_candidate(), mrpt::nav::CAbstractPTGBasedReactive::calc_move_candidate_scores(), mrpt::nav::CReactiveNavigationSystem::implementSenseObstacles(), mrpt::nav::CAbstractPTGBasedReactive::performNavigationStep(), mrpt::nav::CAbstractNavigator::performNavigationStepNavigating(), mrpt::nav::CAbstractNavigator::processNavigateCommand(), mrpt::nav::CAbstractPTGBasedReactive::STEP8_GenerateLogRecord(), mrpt::nav::CAbstractNavigator::updateCurrentPoseAndSpeeds(), and mrpt::nav::CWaypointsNavigator::waypoints_navigationStep().
◆ m_frame_tf
|
protectedinherited |
Optional, user-provided frame transformer.
Definition at line 311 of file CAbstractNavigator.h.
Referenced by mrpt::nav::CAbstractNavigator::getFrameTF(), mrpt::nav::CAbstractPTGBasedReactive::performNavigationStep(), and mrpt::nav::CAbstractNavigator::setFrameTF().
◆ m_last_curPoseVelUpdate_pose_frame_id
|
protectedinherited |
Definition at line 332 of file CAbstractNavigator.h.
Referenced by mrpt::nav::CAbstractNavigator::updateCurrentPoseAndSpeeds().
◆ m_last_curPoseVelUpdate_robot_time
|
protectedinherited |
Definition at line 331 of file CAbstractNavigator.h.
Referenced by mrpt::nav::CAbstractPTGBasedReactive::onStartNewNavigation(), and mrpt::nav::CAbstractNavigator::updateCurrentPoseAndSpeeds().
◆ m_latestOdomPoses
|
protectedinherited |
Definition at line 334 of file CAbstractNavigator.h.
Referenced by mrpt::nav::CAbstractNavigator::CAbstractNavigator(), mrpt::nav::CAbstractNavigator::internal_onStartNewNavigation(), mrpt::nav::CAbstractPTGBasedReactive::performNavigationStep(), and mrpt::nav::CAbstractNavigator::updateCurrentPoseAndSpeeds().
◆ m_latestPoses
|
protectedinherited |
Latest robot poses (updated in CAbstractNavigator::navigationStep() )
Definition at line 334 of file CAbstractNavigator.h.
Referenced by mrpt::nav::CAbstractNavigator::CAbstractNavigator(), mrpt::nav::CAbstractNavigator::internal_onStartNewNavigation(), mrpt::nav::CAbstractPTGBasedReactive::performNavigationStep(), mrpt::nav::CAbstractNavigator::performNavigationStepNavigating(), and mrpt::nav::CAbstractNavigator::updateCurrentPoseAndSpeeds().
◆ m_min_verbosity_level
|
protectedinherited |
Provided messages with VerbosityLevel smaller than this value shall be ignored.
Definition at line 252 of file system/COutputLogger.h.
Referenced by mrpt::system::COutputLogger::getMinLoggingLevel(), and mrpt::system::COutputLogger::isLoggingLevelVisible().
◆ m_nav_cs
|
protectedinherited |
mutex for all navigation methods
Definition at line 314 of file CAbstractNavigator.h.
Referenced by mrpt::nav::CAbstractNavigator::cancel(), mrpt::nav::CAbstractPTGBasedReactive::enableLogFile(), mrpt::nav::CAbstractPTGBasedReactive::initialize(), mrpt::nav::CAbstractNavigator::navigationStep(), mrpt::nav::CAbstractNavigator::onNavigateCommandReceived(), mrpt::nav::CAbstractPTGBasedReactive::preDestructor(), mrpt::nav::CAbstractNavigator::processNavigateCommand(), mrpt::nav::CAbstractNavigator::resetNavError(), mrpt::nav::CAbstractNavigator::resume(), mrpt::nav::CAbstractPTGBasedReactive::setHolonomicMethod(), and mrpt::nav::CAbstractNavigator::suspend().
◆ m_navigationParams
|
protectedinherited |
Current navigation parameters.
Definition at line 305 of file CAbstractNavigator.h.
Referenced by mrpt::nav::CAbstractPTGBasedReactive::calc_move_candidate_scores(), mrpt::nav::CWaypointsNavigator::checkHasReachedTarget(), mrpt::nav::CAbstractNavigator::onNavigateCommandReceived(), mrpt::nav::CAbstractPTGBasedReactive::performNavigationStep(), mrpt::nav::CAbstractNavigator::performNavigationStepNavigating(), and mrpt::nav::CAbstractNavigator::processNavigateCommand().
◆ m_navigationState
|
protectedinherited |
Current internal state of navigator:
Definition at line 303 of file CAbstractNavigator.h.
Referenced by mrpt::nav::CAbstractNavigator::cancel(), mrpt::nav::CAbstractNavigator::doEmergencyStop(), mrpt::nav::CAbstractNavigator::getCurrentState(), mrpt::nav::CWaypointsNavigator::navigationStep(), mrpt::nav::CAbstractNavigator::navigationStep(), mrpt::nav::CAbstractNavigator::performNavigationStepNavigating(), mrpt::nav::CAbstractNavigator::processNavigateCommand(), mrpt::nav::CAbstractNavigator::resetNavError(), mrpt::nav::CAbstractNavigator::resume(), mrpt::nav::CAbstractNavigator::suspend(), and mrpt::nav::CAbstractNavigator::updateCurrentPoseAndSpeeds().
◆ m_pending_events
|
protectedinherited |
Events generated during navigationStep(), enqueued to be called at the end of the method execution to avoid user code to change the navigator state.
Definition at line 244 of file CAbstractNavigator.h.
Referenced by mrpt::nav::CAbstractNavigator::dispatchPendingNavEvents(), mrpt::nav::CWaypointsNavigator::navigateWaypoints(), mrpt::nav::CAbstractNavigator::navigationStep(), mrpt::nav::CAbstractPTGBasedReactive::performNavigationStep(), mrpt::nav::CAbstractNavigator::performNavigationStepNavigating(), and mrpt::nav::CWaypointsNavigator::waypoints_navigationStep().
◆ m_robot
|
protectedinherited |
The navigator-robot interface.
Definition at line 308 of file CAbstractNavigator.h.
Referenced by mrpt::nav::CAbstractNavigator::changeSpeeds(), mrpt::nav::CAbstractNavigator::changeSpeedsNOP(), mrpt::nav::CReactiveNavigationSystem::implementSenseObstacles(), mrpt::nav::CReactiveNavigationSystem3D::implementSenseObstacles(), initialize(), mrpt::nav::CAbstractNavigator::internal_onStartNewNavigation(), navigationStep(), mrpt::nav::CAbstractNavigator::navigationStep(), mrpt::nav::CAbstractPTGBasedReactive::performNavigationStep(), mrpt::nav::CAbstractNavigator::performNavigationStepNavigating(), mrpt::nav::CAbstractNavigator::stop(), mrpt::nav::CAbstractNavigator::updateCurrentPoseAndSpeeds(), and mrpt::nav::CWaypointsNavigator::waypoints_navigationStep().
◆ m_timlog_delays
|
protectedinherited |
Time logger to collect delay-related stats.
Definition at line 337 of file CAbstractNavigator.h.
Referenced by mrpt::nav::CAbstractNavigator::getDelaysTimeLogger(), mrpt::nav::CReactiveNavigationSystem::implementSenseObstacles(), mrpt::nav::CReactiveNavigationSystem3D::implementSenseObstacles(), mrpt::nav::CAbstractNavigator::navigationStep(), mrpt::nav::CAbstractPTGBasedReactive::performNavigationStep(), mrpt::nav::CAbstractPTGBasedReactive::STEP8_GenerateLogRecord(), mrpt::nav::CAbstractNavigator::updateCurrentPoseAndSpeeds(), and mrpt::nav::CWaypointsNavigator::waypoints_navigationStep().
◆ params_abstract_navigator
|
inherited |
Definition at line 219 of file CAbstractNavigator.h.
Referenced by mrpt::nav::CAbstractNavigator::loadConfigFile(), mrpt::nav::CAbstractNavigator::performNavigationStepNavigating(), and mrpt::nav::CAbstractNavigator::saveConfigFile().
◆ programmed_orders
| std::map<double, TVelCmd> mrpt::nav::CNavigatorManualSequence::programmed_orders |
map [time_in_secs_since_beginning] -> orders.
Definition at line 49 of file CNavigatorManualSequence.h.
Referenced by initialize(), loadConfigFile(), and navigationStep().