Detailed Description
#include <pnp/lhm.h>
Public Member Functions | |
| lhm (Eigen::MatrixXd obj_pts_, Eigen::MatrixXd img_pts_, Eigen::MatrixXd cam_, int n0) | |
| Number of 2d/3d correspondences. More... | |
| bool | compute_pose (Eigen::Ref< Eigen::Matrix3d > R_, Eigen::Ref< Eigen::Vector3d > t_) |
| Function to compute pose using LHM PnP algorithm. More... | |
| void | absKernel () |
| Function to compute pose during an iteration. More... | |
| void | estimate_t () |
| Function to estimate translation given an estimated rotation matrix. More... | |
| void | xform () |
| Transform object points in Body frame (Landmark Frame) to estimated Camera Frame. More... | |
| Eigen::Matrix4d | qMatQ (Eigen::VectorXd q) |
| Iternal Function of quaternion. More... | |
| Eigen::Matrix4d | qMatW (Eigen::VectorXd q) |
| Iternal Function of quaternion. More... | |
Private Attributes | |
| Eigen::MatrixXd | obj_pts |
| Eigen::MatrixXd | img_pts |
| Object points in Camera Co-ordinate system. More... | |
| Eigen::MatrixXd | cam_intrinsic |
| Image points in pixel co-ordinates. More... | |
| Eigen::MatrixXd | P |
| Camera intrinsic matrix. More... | |
| Eigen::MatrixXd | Q |
| Trnaspose of Object points @obj_pts. More... | |
| Eigen::Matrix3d | R |
| Transpose of Image points @img_pts. More... | |
| Eigen::Matrix3d | G |
| Matrix for internal computations. More... | |
| Eigen::Vector3d | t |
| Rotation Matrix. More... | |
| std::vector< Eigen::Matrix3d > | F |
| Translation Vector. More... | |
| double | err |
| Storage matrix for each point. More... | |
| double | err2 |
| Error variable for convergence selection. More... | |
| int | n |
| Error variable for convergence selection. More... | |
Constructor & Destructor Documentation
◆ lhm()
| lhm::lhm | ( | Eigen::MatrixXd | obj_pts_, |
| Eigen::MatrixXd | img_pts_, | ||
| Eigen::MatrixXd | cam_, | ||
| int | n0 | ||
| ) |
Member Function Documentation
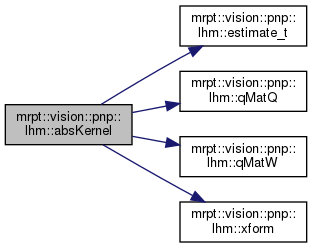
◆ absKernel()
| void lhm::absKernel | ( | ) |

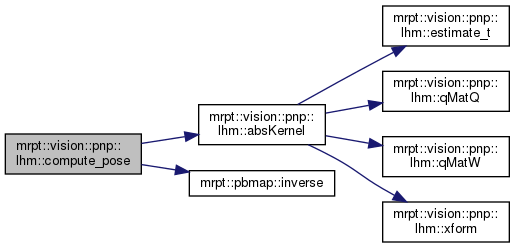
◆ compute_pose()
| bool lhm::compute_pose | ( | Eigen::Ref< Eigen::Matrix3d > | R_, |
| Eigen::Ref< Eigen::Vector3d > | t_ | ||
| ) |
Function to compute pose using LHM PnP algorithm.
- Parameters
-
R_ Rotation matrix t_ Trnaslation Vector
- Returns
- Success flag
Definition at line 194 of file lhm.cpp.
References absKernel(), EPSILON_LHM, err, err2, F, G, mrpt::pbmap::inverse(), n, P, Q, R, and TOL_LHM.
Referenced by mrpt::vision::pnp::CPnP::lhm().

◆ estimate_t()
| void lhm::estimate_t | ( | ) |

◆ qMatQ()
| Eigen::Matrix4d lhm::qMatQ | ( | Eigen::VectorXd | q | ) |
Iternal Function of quaternion.
- Parameters
-
q Quaternion
- Returns
Definition at line 61 of file lhm.cpp.
Referenced by absKernel().

◆ qMatW()
| Eigen::Matrix4d lhm::qMatW | ( | Eigen::VectorXd | q | ) |
Iternal Function of quaternion.
- Parameters
-
q Quaternion
- Returns
Definition at line 71 of file lhm.cpp.
Referenced by absKernel().

◆ xform()
| void lhm::xform | ( | ) |

Member Data Documentation
◆ cam_intrinsic
|
private |
◆ err
|
private |
◆ err2
|
private |
Error variable for convergence selection.
Definition at line 56 of file lhm.h.
Referenced by absKernel(), and compute_pose().
◆ F
|
private |
Translation Vector.
Definition at line 54 of file lhm.h.
Referenced by absKernel(), compute_pose(), and estimate_t().
◆ G
|
private |
Matrix for internal computations.
Definition at line 51 of file lhm.h.
Referenced by compute_pose(), and estimate_t().
◆ img_pts
|
private |
◆ n
|
private |
Error variable for convergence selection.
Definition at line 58 of file lhm.h.
Referenced by absKernel(), compute_pose(), estimate_t(), and xform().
◆ obj_pts
|
private |
◆ P
|
private |
Camera intrinsic matrix.
Definition at line 47 of file lhm.h.
Referenced by absKernel(), compute_pose(), estimate_t(), lhm(), and xform().
◆ Q
|
private |
Trnaspose of Object points @obj_pts.
Definition at line 48 of file lhm.h.
Referenced by absKernel(), compute_pose(), lhm(), and xform().
◆ R
|
private |
Transpose of Image points @img_pts.
Definition at line 50 of file lhm.h.
Referenced by absKernel(), compute_pose(), estimate_t(), and xform().