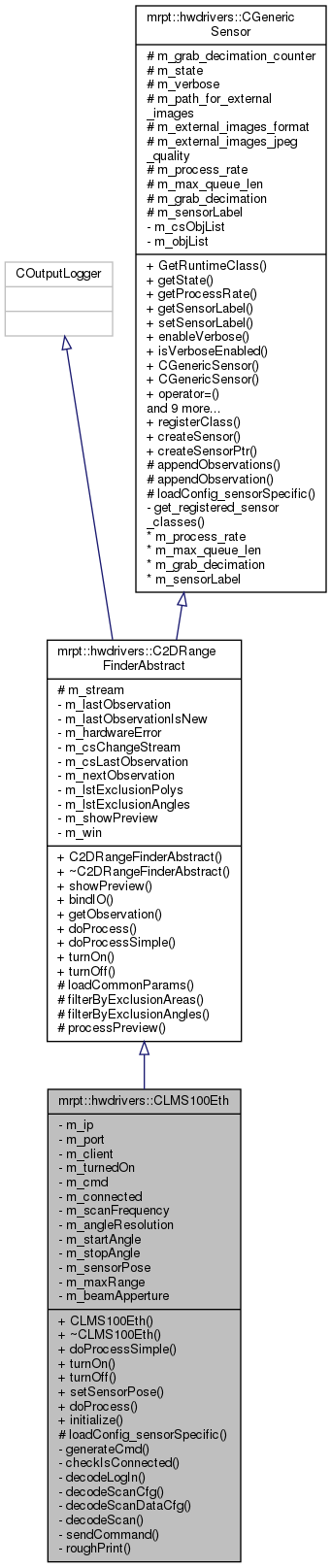
Detailed Description
This "software driver" implements the communication protocol for interfacing a SICK LMS100 laser scanners through an ethernet controller.
This class does not need to be bind, i.e. you do not need to call C2DRangeFinderAbstract::bindIO. Connection is established when user call the turnOn() method. You can pass to the class's constructor the LMS100 's ip address and port. Device will be configured with the following parameters :
- Start Angle : -45 deg (imposed by hardware)
- Stop Angle : +225 deg (imposed by hardware)
- Apperture : 270 deg (imposed by hardware)
- Angular resolution : 0.25 deg
- Scan frequency : 25 Hz
- Max Range : 20m (imposed by hardware).
Important note: SICK LMS 1xx devices have two levels of configuration. In its present implementation, this class only handles one of them, so before using this class, you must "pre-configure" your scanner with the SICK's software "SOAP" (this software ships with the device), and set the framerate with this software. Of course, you have to pre-configure the device just once, then save that configuration in its flash memory.
To get a laser scan you must proceed like that :
\code
CLMS200Eth laser(string("192.168.0.10"), 1234);
laser.turnOn();
bool isOutObs, hardwareError;
CObservation2DRangeScan outObs;
laser.doProcessSimple(isOutObs, outObs, hardwareError);
\endcode
The sensor pose on the vehicle could be loaded from an ini configuration
file with :
This class doesn't configure the SICK LMS sensor, it is recomended to configure the sensor via the the SICK software : SOPAS.
- Note
- This class was contributed by Adrien Barral - Robopec (France)
Definition at line 75 of file CLMS100eth.h.
#include <mrpt/hwdrivers/CLMS100eth.h>
Public Types | |
| enum | TSensorState { ssInitializing = 0 , ssWorking , ssError } |
| The current state of the sensor. More... | |
| using | Ptr = std::shared_ptr< CGenericSensor > |
| typedef std::multimap< mrpt::system::TTimeStamp, mrpt::utils::CSerializable::Ptr > | TListObservations |
| typedef std::pair< mrpt::system::TTimeStamp, mrpt::utils::CSerializable::Ptr > | TListObsPair |
Public Member Functions | |
| CLMS100Eth (std::string _ip=std::string("192.168.0.1"), unsigned int _port=2111) | |
| Constructor. More... | |
| virtual | ~CLMS100Eth () |
| Destructor. More... | |
| void | doProcessSimple (bool &outThereIsObservation, mrpt::obs::CObservation2DRangeScan &outObservation, bool &hardwareError) |
| This function acquire a laser scan from the device. More... | |
| bool | turnOn () |
| This method must be called before trying to get a laser scan. More... | |
| bool | turnOff () |
| This method could be called manually to stop communication with the device. More... | |
| void | setSensorPose (const mrpt::poses::CPose3D &_pose) |
| A method to set the sensor pose on the robot. More... | |
| void | doProcess () |
| This method should be called periodically. More... | |
| void | initialize () |
| Initialize the sensor according to the parameters previously read in the configuration file. More... | |
| void | showPreview (bool enable=true) |
| Enables GUI visualization in real-time. More... | |
| void | bindIO (mrpt::utils::CStream *streamIO) |
| Binds the object to a given I/O channel. More... | |
| void | getObservation (bool &outThereIsObservation, mrpt::obs::CObservation2DRangeScan &outObservation, bool &hardwareError) |
| Get the last observation from the sensor, if available, and unmarks it as being "the last one" (thus a new scan must arrive or subsequent calls will find no new observations). More... | |
| virtual const mrpt::hwdrivers::TSensorClassId * | GetRuntimeClass () const =0 |
| TSensorState | getState () const |
| The current state of the sensor More... | |
| double | getProcessRate () const |
| std::string | getSensorLabel () const |
| void | setSensorLabel (const std::string &sensorLabel) |
| void | enableVerbose (bool enabled=true) |
| Enable or disable extra debug info dumped to std::cout during sensor operation. More... | |
| bool | isVerboseEnabled () const |
| void | loadConfig (const mrpt::utils::CConfigFileBase &configSource, const std::string §ion) |
| Loads the generic settings common to any sensor (See CGenericSensor), then call to "loadConfig_sensorSpecific". More... | |
| void | getObservations (TListObservations &lstObjects) |
| Returns a list of enqueued objects, emptying it (thread-safe). More... | |
| virtual void | setPathForExternalImages (const std::string &directory) |
| Set the path where to save off-rawlog image files (will be ignored in those sensors where this is not applicable). More... | |
| void | setExternalImageFormat (const std::string &ext) |
| Set the extension ("jpg","gif","png",...) that determines the format of images saved externally The default is "jpg". More... | |
| void | setExternalImageJPEGQuality (const unsigned int quality) |
| The quality of JPEG compression, when external images is enabled and the format is "jpg". More... | |
| unsigned int | getExternalImageJPEGQuality () const |
Static Public Member Functions | |
| static void | registerClass (const TSensorClassId *pNewClass) |
| Register a class into the internal list of "CGenericSensor" descendents. More... | |
| static CGenericSensor * | createSensor (const std::string &className) |
| Creates a sensor by a name of the class. More... | |
| static CGenericSensor::Ptr | createSensorPtr (const std::string &className) |
| Just like createSensor, but returning a smart pointer to the newly created sensor object. More... | |
Protected Member Functions | |
| void | loadConfig_sensorSpecific (const mrpt::utils::CConfigFileBase &configSource, const std::string &iniSection) |
| Load sensor pose on the robot, or keep the default sensor pose. More... | |
| void | loadCommonParams (const mrpt::utils::CConfigFileBase &configSource, const std::string &iniSection) |
| Should be call by derived classes at "loadConfig" (loads exclusion areas AND exclusion angles). More... | |
| void | filterByExclusionAreas (mrpt::obs::CObservation2DRangeScan &obs) const |
| Mark as invalid those points which (x,y) coordinates fall within the exclusion polygons. More... | |
| void | filterByExclusionAngles (mrpt::obs::CObservation2DRangeScan &obs) const |
| Mark as invalid those ranges in a set of forbiden angle ranges. More... | |
| void | processPreview (const mrpt::obs::CObservation2DRangeScan &obs) |
| Must be called inside the capture method to allow optional GUI preview of scans. More... | |
| void | appendObservations (const std::vector< mrpt::utils::CSerializable::Ptr > &obj) |
| This method must be called by derived classes to enqueue a new observation in the list to be returned by getObservations. More... | |
| void | appendObservation (const mrpt::utils::CSerializable::Ptr &obj) |
| Like appendObservations() but for just one observation. More... | |
Protected Attributes | |
| utils::CStream * | m_stream |
| The I/O channel (will be nullptr if not bound). More... | |
| size_t | m_grab_decimation_counter |
| Used when "m_grab_decimation" is enabled. More... | |
| TSensorState | m_state |
| bool | m_verbose |
| std::string | m_path_for_external_images |
| The path where to save off-rawlog images: empty means save images embedded in the rawlog. More... | |
| std::string | m_external_images_format |
| The extension ("jpg","gif","png",...) that determines the format of images saved externally. More... | |
| unsigned int | m_external_images_jpeg_quality |
| For JPEG images, the quality (default=95%). More... | |
Common settings to any sensor, loaded in "loadConfig" | |
| double | m_process_rate |
| See CGenericSensor. More... | |
| size_t | m_max_queue_len |
| See CGenericSensor. More... | |
| size_t | m_grab_decimation |
| If set to N>=2, only 1 out of N observations will be saved to m_objList. More... | |
| std::string | m_sensorLabel |
| See CGenericSensor. More... | |
Private Types | |
| typedef std::map< std::string, const TSensorClassId * > | registered_sensor_classes_t |
| Used in registerClass. More... | |
Private Member Functions | |
| void | generateCmd (const char *cmd) |
| Add the start and end character. More... | |
| bool | checkIsConnected () |
| bool | decodeLogIn (char *msg) |
| bool | decodeScanCfg (std::istringstream &stream) |
| bool | decodeScanDataCfg (std::istringstream &stream) |
| bool | decodeScan (char *buf, mrpt::obs::CObservation2DRangeScan &outObservation) |
| void | sendCommand (const char *cmd) |
| void | roughPrint (char *msg) |
Static Private Member Functions | |
| static registered_sensor_classes_t & | get_registered_sensor_classes () |
| Access to singleton. More... | |
Private Attributes | |
| std::string | m_ip |
| unsigned int | m_port |
| mrpt::comms::CClientTCPSocket | m_client |
| bool | m_turnedOn |
| std::string | m_cmd |
| bool | m_connected |
| unsigned int | m_scanFrequency |
| double | m_angleResolution |
| double | m_startAngle |
| double | m_stopAngle |
| mrpt::poses::CPose3D | m_sensorPose |
| double | m_maxRange |
| double | m_beamApperture |
| mrpt::obs::CObservation2DRangeScan | m_lastObservation |
| bool | m_lastObservationIsNew |
| bool | m_hardwareError |
| std::mutex | m_csChangeStream |
| For being thread-safe. More... | |
| std::mutex | m_csLastObservation |
| mrpt::obs::CObservation2DRangeScan::Ptr | m_nextObservation |
| A dynamic object used as buffer in doProcess. More... | |
| mrpt::obs::CObservation2DRangeScan::TListExclusionAreasWithRanges | m_lstExclusionPolys |
| A list of optional exclusion polygons, in coordinates relative to the vehicle, that is, taking into account the "sensorPose". More... | |
| std::vector< std::pair< double, double > > | m_lstExclusionAngles |
| A list of pairs of angles <init,end> such as all sensor ranges falling in those forbiden angles will be marked as invalid. More... | |
| bool | m_showPreview |
| If true, shows a 3D window with a preview of the grabber data. More... | |
| mrpt::gui::CDisplayWindow3D::Ptr | m_win |
| std::mutex | m_csObjList |
| The critical section for m_objList. More... | |
| TListObservations | m_objList |
| The queue of objects to be returned by getObservations. More... | |
Member Typedef Documentation
◆ Ptr
|
inherited |
Definition at line 73 of file CGenericSensor.h.
◆ registered_sensor_classes_t
|
privateinherited |
Used in registerClass.
Definition at line 125 of file CGenericSensor.h.
◆ TListObservations
|
inherited |
Definition at line 78 of file CGenericSensor.h.
◆ TListObsPair
|
inherited |
Definition at line 80 of file CGenericSensor.h.
Member Enumeration Documentation
◆ TSensorState
|
inherited |
The current state of the sensor.
- See also
- CGenericSensor::getState
| Enumerator | |
|---|---|
| ssInitializing | |
| ssWorking | |
| ssError | |
Definition at line 85 of file CGenericSensor.h.
Constructor & Destructor Documentation
◆ CLMS100Eth()
| CLMS100Eth::CLMS100Eth | ( | std::string | _ip = std::string("192.168.0.1"), |
| unsigned int | _port = 2111 |
||
| ) |
Constructor.
Note that there is default arguments, here you can customize IP Adress and TCP Port of your device.
Definition at line 31 of file CLMS100eth.cpp.
◆ ~CLMS100Eth()
|
virtual |
Destructor.
Close communcation with the device, and free memory.
Definition at line 45 of file CLMS100eth.cpp.
Member Function Documentation
◆ appendObservation()
|
inlineprotectedinherited |
Like appendObservations() but for just one observation.
Definition at line 180 of file CGenericSensor.h.
References mrpt::hwdrivers::CGenericSensor::appendObservations().
Referenced by mrpt::hwdrivers::C2DRangeFinderAbstract::doProcess(), mrpt::hwdrivers::CCANBusReader::doProcess(), mrpt::hwdrivers::CGyroKVHDSP3000::doProcess(), mrpt::hwdrivers::CIMUIntersense::doProcess(), mrpt::hwdrivers::CIMUXSens::doProcess(), mrpt::hwdrivers::CIMUXSens_MT4::doProcess(), mrpt::hwdrivers::CSkeletonTracker::doProcess(), mrpt::hwdrivers::CSwissRanger3DCamera::doProcess(), mrpt::hwdrivers::CVelodyneScanner::doProcess(), and mrpt::hwdrivers::CGPSInterface::flushParsedMessagesNow().


◆ appendObservations()
|
protectedinherited |
This method must be called by derived classes to enqueue a new observation in the list to be returned by getObservations.
Passed objects must be created in dynamic memory and a smart pointer passed. Example of creation:
If several observations are passed at once in the vector, they'll be considered as a block regarding the grabbing decimation factor.
Definition at line 53 of file CGenericSensor.cpp.
References CLASS_ID, mrpt::hwdrivers::CGenericSensor::m_csObjList, mrpt::hwdrivers::CGenericSensor::m_grab_decimation, mrpt::hwdrivers::CGenericSensor::m_grab_decimation_counter, mrpt::hwdrivers::CGenericSensor::m_objList, and THROW_EXCEPTION.
Referenced by mrpt::hwdrivers::CGenericSensor::appendObservation(), mrpt::hwdrivers::CKinect::doProcess(), and mrpt::hwdrivers::CNationalInstrumentsDAQ::doProcess().

◆ bindIO()
|
inherited |
Binds the object to a given I/O channel.
The stream object must not be deleted before the destruction of this class.
- See also
- comms::CSerialPort
Definition at line 43 of file C2DRangeFinderAbstract.cpp.
References mrpt::hwdrivers::C2DRangeFinderAbstract::m_csChangeStream, and mrpt::hwdrivers::C2DRangeFinderAbstract::m_stream.
Referenced by mrpt::hwdrivers::CHokuyoURG::checkCOMisOpen().

◆ checkIsConnected()
|
private |
Definition at line 88 of file CLMS100eth.cpp.
References MRPT_LOG_ERROR_FMT.
◆ createSensor()
|
staticinherited |
Creates a sensor by a name of the class.
Typically the user may want to create a smart pointer around the returned pointer, whis is made with:
- Returns
- A pointer to a new class, or nullptr if class name is unknown.
Definition at line 103 of file CGenericSensor.cpp.
References mrpt::hwdrivers::CGenericSensor::get_registered_sensor_classes().
Referenced by mrpt::hwdrivers::CGenericSensor::createSensorPtr().


◆ createSensorPtr()
|
inlinestaticinherited |
Just like createSensor, but returning a smart pointer to the newly created sensor object.
Definition at line 220 of file CGenericSensor.h.
References mrpt::hwdrivers::CGenericSensor::createSensor().

◆ decodeLogIn()
|
private |
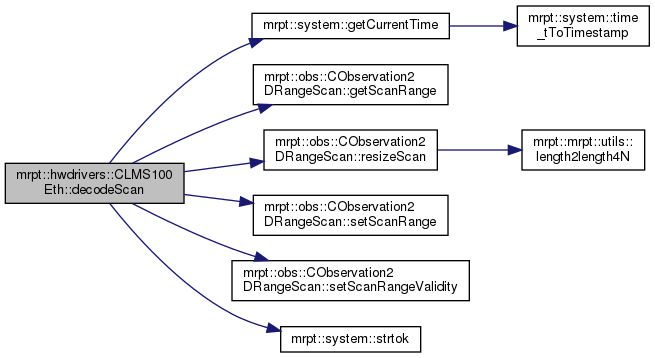
◆ decodeScan()
|
private |
Definition at line 233 of file CLMS100eth.cpp.
References mrpt::obs::CObservation2DRangeScan::aperture, APPERTURE, mrpt::obs::CObservation2DRangeScan::beamAperture, mrpt::system::getCurrentTime(), mrpt::obs::CObservation2DRangeScan::getScanRange(), mrpt::obs::CObservation2DRangeScan::maxRange, MRPT_LOG_DEBUG, MRPT_LOG_DEBUG_FMT, MRPT_LOG_ERROR_FMT, mrpt::obs::CObservation2DRangeScan::resizeScan(), mrpt::obs::CObservation2DRangeScan::rightToLeft, mrpt::obs::CObservation::sensorLabel, mrpt::obs::CObservation2DRangeScan::sensorPose, mrpt::obs::CObservation2DRangeScan::setScanRange(), mrpt::obs::CObservation2DRangeScan::setScanRangeValidity(), mrpt::obs::CObservation2DRangeScan::stdError, mrpt::system::strtok(), THROW_EXCEPTION, and mrpt::obs::CObservation::timestamp.
◆ decodeScanCfg()
|
private |
◆ decodeScanDataCfg()
|
private |
◆ doProcess()
|
virtual |
This method should be called periodically.
Period depend on the process_rate in the configuration file.
Reimplemented from mrpt::hwdrivers::C2DRangeFinderAbstract.
Definition at line 355 of file CLMS100eth.cpp.
References THROW_EXCEPTION.
◆ doProcessSimple()
|
virtual |
This function acquire a laser scan from the device.
If an error occured, hardwareError will be set to true. The new laser scan will be stored in the outObservation argument.
- Exceptions
-
This method throw exception if the frame received from the LMS 100 contain the following bad parameters : - Status is not OK
- Data in the scan aren't DIST1 (may be RSSIx or DIST2).
Implements mrpt::hwdrivers::C2DRangeFinderAbstract.
Definition at line 313 of file CLMS100eth.cpp.
References MRPT_LOG_ERROR.
◆ enableVerbose()
|
inlineinherited |
Enable or disable extra debug info dumped to std::cout during sensor operation.
Default: disabled unless the environment variable "MRPT_HWDRIVERS_VERBOSE" is set to "1" during object creation.
Definition at line 106 of file CGenericSensor.h.
References mrpt::hwdrivers::CGenericSensor::m_verbose.
◆ filterByExclusionAngles()
|
protectedinherited |
Mark as invalid those ranges in a set of forbiden angle ranges.
- See also
- loadExclusionAreas
Definition at line 183 of file C2DRangeFinderAbstract.cpp.
References mrpt::obs::CObservation2DRangeScan::filterByExclusionAngles(), and mrpt::hwdrivers::C2DRangeFinderAbstract::m_lstExclusionAngles.
Referenced by mrpt::hwdrivers::CHokuyoURG::doProcessSimple(), mrpt::hwdrivers::CRoboPeakLidar::doProcessSimple(), mrpt::hwdrivers::CSickLaserSerial::doProcessSimple(), and mrpt::hwdrivers::CSickLaserUSB::doProcessSimple().


◆ filterByExclusionAreas()
|
protectedinherited |
Mark as invalid those points which (x,y) coordinates fall within the exclusion polygons.
- See also
- loadExclusionAreas
Definition at line 174 of file C2DRangeFinderAbstract.cpp.
References mrpt::obs::CObservation2DRangeScan::filterByExclusionAreas(), and mrpt::hwdrivers::C2DRangeFinderAbstract::m_lstExclusionPolys.
Referenced by mrpt::hwdrivers::CHokuyoURG::doProcessSimple(), mrpt::hwdrivers::CRoboPeakLidar::doProcessSimple(), mrpt::hwdrivers::CSickLaserSerial::doProcessSimple(), and mrpt::hwdrivers::CSickLaserUSB::doProcessSimple().


◆ generateCmd()
|
private |
Add the start and end character.
Definition at line 223 of file CLMS100eth.cpp.
References mrpt::format(), and MRPT_LOG_ERROR.

◆ get_registered_sensor_classes()
|
staticprivateinherited |
Access to singleton.
Definition at line 112 of file CGenericSensor.cpp.
Referenced by mrpt::hwdrivers::CGenericSensor::createSensor(), and mrpt::hwdrivers::CGenericSensor::registerClass().

◆ getExternalImageJPEGQuality()
|
inlineinherited |
Definition at line 290 of file CGenericSensor.h.
References mrpt::hwdrivers::CGenericSensor::m_external_images_jpeg_quality.
◆ getObservation()
|
inherited |
Get the last observation from the sensor, if available, and unmarks it as being "the last one" (thus a new scan must arrive or subsequent calls will find no new observations).
Definition at line 53 of file C2DRangeFinderAbstract.cpp.
References mrpt::hwdrivers::C2DRangeFinderAbstract::m_csLastObservation, mrpt::hwdrivers::C2DRangeFinderAbstract::m_hardwareError, mrpt::hwdrivers::C2DRangeFinderAbstract::m_lastObservation, and mrpt::hwdrivers::C2DRangeFinderAbstract::m_lastObservationIsNew.
◆ getObservations()
|
inherited |
Returns a list of enqueued objects, emptying it (thread-safe).
The objects must be freed by the invoker.
Definition at line 91 of file CGenericSensor.cpp.
References mrpt::hwdrivers::CGenericSensor::m_csObjList, and mrpt::hwdrivers::CGenericSensor::m_objList.
◆ getProcessRate()
|
inlineinherited |
Definition at line 94 of file CGenericSensor.h.
References mrpt::hwdrivers::CGenericSensor::m_process_rate.
◆ GetRuntimeClass()
|
pure virtualinherited |
◆ getSensorLabel()
|
inlineinherited |
Definition at line 95 of file CGenericSensor.h.
References mrpt::hwdrivers::CGenericSensor::m_sensorLabel.
◆ getState()
|
inlineinherited |
The current state of the sensor
Definition at line 93 of file CGenericSensor.h.
References mrpt::hwdrivers::CGenericSensor::m_state.
◆ initialize()
Initialize the sensor according to the parameters previously read in the configuration file.
Reimplemented from mrpt::hwdrivers::CGenericSensor.
Definition at line 52 of file CLMS100eth.cpp.
References THROW_EXCEPTION.
◆ isVerboseEnabled()
|
inlineinherited |
Definition at line 107 of file CGenericSensor.h.
References mrpt::hwdrivers::CGenericSensor::m_verbose.
◆ loadCommonParams()
|
protectedinherited |
Should be call by derived classes at "loadConfig" (loads exclusion areas AND exclusion angles).
This loads a sequence of vertices of a polygon given by its (x,y) coordinates relative to the vehicle, that is, taking into account the "sensorPose".
- exclusionZoneu_x
- exclusionZoneu_y for u=1,2,3,... All points within the 2D polygon will be ignored, for any Z, unless an optional entry is found:
- exclusionZoneu_z=[z_min z_max] In that case, only the points within the 2D polygon AND the given range in Z will be ignored.
The number of zones is variable, but they must start at 1 and be consecutive.
This also loads any other common params (e.g. 'preview')
- See also
- filterByExclusionAreas
Definition at line 98 of file C2DRangeFinderAbstract.cpp.
References ASSERT_, ASSERTMSG_, DEG2RAD, mrpt::format(), mrpt::hwdrivers::C2DRangeFinderAbstract::m_lstExclusionAngles, mrpt::hwdrivers::C2DRangeFinderAbstract::m_lstExclusionPolys, M_PI, mrpt::hwdrivers::C2DRangeFinderAbstract::m_showPreview, mrpt::utils::CConfigFileBase::read_bool(), mrpt::utils::CConfigFileBase::read_double(), and mrpt::utils::CConfigFileBase::read_vector().
Referenced by mrpt::hwdrivers::CHokuyoURG::loadConfig_sensorSpecific(), mrpt::hwdrivers::CRoboPeakLidar::loadConfig_sensorSpecific(), mrpt::hwdrivers::CSickLaserSerial::loadConfig_sensorSpecific(), and mrpt::hwdrivers::CSickLaserUSB::loadConfig_sensorSpecific().


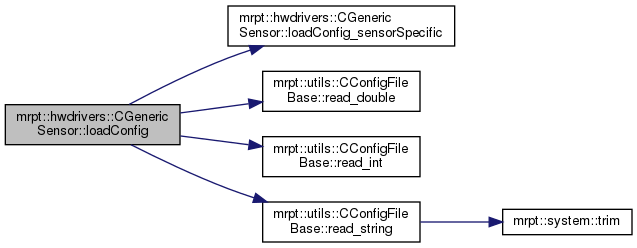
◆ loadConfig()
|
inherited |
Loads the generic settings common to any sensor (See CGenericSensor), then call to "loadConfig_sensorSpecific".
- Exceptions
-
This method throws an exception with a descriptive message if some critical parameter is missing or has an invalid value.
Definition at line 132 of file CGenericSensor.cpp.
References mrpt::hwdrivers::CGenericSensor::loadConfig_sensorSpecific(), mrpt::hwdrivers::CGenericSensor::m_grab_decimation, mrpt::hwdrivers::CGenericSensor::m_grab_decimation_counter, mrpt::hwdrivers::CGenericSensor::m_max_queue_len, mrpt::hwdrivers::CGenericSensor::m_process_rate, mrpt::hwdrivers::CGenericSensor::m_sensorLabel, MRPT_END, MRPT_START, mrpt::utils::CConfigFileBase::read_double(), mrpt::utils::CConfigFileBase::read_int(), and mrpt::utils::CConfigFileBase::read_string().
◆ loadConfig_sensorSpecific()
|
protectedvirtual |
Load sensor pose on the robot, or keep the default sensor pose.
Implements mrpt::hwdrivers::CGenericSensor.
Definition at line 63 of file CLMS100eth.cpp.
References DEG2RAD, mrpt::utils::CConfigFileBase::read_float(), mrpt::utils::CConfigFileBase::read_int(), and mrpt::utils::CConfigFileBase::read_string().

◆ processPreview()
|
protectedinherited |
Must be called inside the capture method to allow optional GUI preview of scans.
Definition at line 189 of file C2DRangeFinderAbstract.cpp.
References mrpt::hwdrivers::CGenericSensor::m_sensorLabel, mrpt::hwdrivers::C2DRangeFinderAbstract::m_showPreview, and mrpt::hwdrivers::C2DRangeFinderAbstract::m_win.
Referenced by mrpt::hwdrivers::CHokuyoURG::doProcessSimple(), mrpt::hwdrivers::CRoboPeakLidar::doProcessSimple(), mrpt::hwdrivers::CSickLaserSerial::doProcessSimple(), and mrpt::hwdrivers::CSickLaserUSB::doProcessSimple().

◆ registerClass()
|
staticinherited |
Register a class into the internal list of "CGenericSensor" descendents.
Used internally in the macros DEFINE_GENERIC_SENSOR, etc...
Can be used as "CGenericSensor::registerClass( SENSOR_CLASS_ID(CMySensor) );" if building custom sensors outside mrpt libraries in user code.
Definition at line 121 of file CGenericSensor.cpp.
References mrpt::hwdrivers::TSensorClassId::className, and mrpt::hwdrivers::CGenericSensor::get_registered_sensor_classes().
Referenced by mrpt::hwdrivers::CGenericSensor::CLASSINIT_GENERIC_SENSOR::CLASSINIT_GENERIC_SENSOR().


◆ roughPrint()
|
private |
◆ sendCommand()
|
private |
Definition at line 214 of file CLMS100eth.cpp.
◆ setExternalImageFormat()
|
inlineinherited |
Set the extension ("jpg","gif","png",...) that determines the format of images saved externally The default is "jpg".
Definition at line 279 of file CGenericSensor.h.
References mrpt::hwdrivers::CGenericSensor::m_external_images_format.
◆ setExternalImageJPEGQuality()
|
inlineinherited |
The quality of JPEG compression, when external images is enabled and the format is "jpg".
- See also
- setExternalImageFormat
Definition at line 286 of file CGenericSensor.h.
References mrpt::hwdrivers::CGenericSensor::m_external_images_jpeg_quality.
◆ setPathForExternalImages()
|
inlinevirtualinherited |
Set the path where to save off-rawlog image files (will be ignored in those sensors where this is not applicable).
An empty string (the default value at construction) means to save images embedded in the rawlog, instead of on separate files.
- Exceptions
-
std::exception If the directory doesn't exists and cannot be created.
Reimplemented in mrpt::hwdrivers::CSwissRanger3DCamera, mrpt::hwdrivers::COpenNI2Sensor, mrpt::hwdrivers::COpenNI2_RGBD360, mrpt::hwdrivers::CKinect, and mrpt::hwdrivers::CCameraSensor.
Definition at line 268 of file CGenericSensor.h.
References MRPT_UNUSED_PARAM.
◆ setSensorLabel()
|
inlineinherited |
Definition at line 96 of file CGenericSensor.h.
References mrpt::hwdrivers::CGenericSensor::m_sensorLabel.
◆ setSensorPose()
| void CLMS100Eth::setSensorPose | ( | const mrpt::poses::CPose3D & | _pose | ) |
A method to set the sensor pose on the robot.
Equivalent to setting the sensor pose via loading it from a config file.
Definition at line 382 of file CLMS100eth.cpp.
◆ showPreview()
|
inlineinherited |
Enables GUI visualization in real-time.
Definition at line 120 of file C2DRangeFinderAbstract.h.
References mrpt::hwdrivers::C2DRangeFinderAbstract::m_showPreview.
◆ turnOff()
|
virtual |
This method could be called manually to stop communication with the device.
Method is also called by destructor.
Implements mrpt::hwdrivers::C2DRangeFinderAbstract.
Definition at line 110 of file CLMS100eth.cpp.
◆ turnOn()
|
virtual |
This method must be called before trying to get a laser scan.
From the LMS100 datasheet : :
- Login sMN SetAccessMode 03 F4724744F4724744
- Set Scanarea and Resolution
- sMN mLMPsetscancfg
- SWN LMDscandatacfg 01 00 0 1 0 00 00 0 0 0 0 1
- SMN mEEwriteall Je ne le fais pas, car ca écrit en mémoire non volatile...
- Request scan : sRN LMDscandata OR sEN LMDscandata
Implements mrpt::hwdrivers::C2DRangeFinderAbstract.
Definition at line 118 of file CLMS100eth.cpp.
References MRPT_LOG_DEBUG_FMT, and MRPT_LOG_ERROR_FMT.
Member Data Documentation
◆ m_angleResolution
|
private |
Definition at line 136 of file CLMS100eth.h.
◆ m_beamApperture
|
private |
Definition at line 141 of file CLMS100eth.h.
◆ m_client
|
private |
Definition at line 131 of file CLMS100eth.h.
◆ m_cmd
|
private |
Definition at line 133 of file CLMS100eth.h.
◆ m_connected
|
private |
Definition at line 134 of file CLMS100eth.h.
◆ m_csChangeStream
|
privateinherited |
For being thread-safe.
Definition at line 53 of file C2DRangeFinderAbstract.h.
Referenced by mrpt::hwdrivers::C2DRangeFinderAbstract::bindIO().
◆ m_csLastObservation
|
privateinherited |
Definition at line 53 of file C2DRangeFinderAbstract.h.
Referenced by mrpt::hwdrivers::C2DRangeFinderAbstract::getObservation().
◆ m_csObjList
|
privateinherited |
The critical section for m_objList.
Definition at line 119 of file CGenericSensor.h.
Referenced by mrpt::hwdrivers::CGenericSensor::appendObservations(), and mrpt::hwdrivers::CGenericSensor::getObservations().
◆ m_external_images_format
|
protectedinherited |
The extension ("jpg","gif","png",...) that determines the format of images saved externally.
- See also
- setPathForExternalImages
Definition at line 158 of file CGenericSensor.h.
Referenced by mrpt::hwdrivers::CSwissRanger3DCamera::getNextObservation(), mrpt::hwdrivers::CSwissRanger3DCamera::loadConfig_sensorSpecific(), and mrpt::hwdrivers::CGenericSensor::setExternalImageFormat().
◆ m_external_images_jpeg_quality
|
protectedinherited |
For JPEG images, the quality (default=95%).
Definition at line 160 of file CGenericSensor.h.
Referenced by mrpt::hwdrivers::CGenericSensor::getExternalImageJPEGQuality(), mrpt::hwdrivers::CSwissRanger3DCamera::getNextObservation(), mrpt::hwdrivers::CSwissRanger3DCamera::loadConfig_sensorSpecific(), and mrpt::hwdrivers::CGenericSensor::setExternalImageJPEGQuality().
◆ m_grab_decimation
|
protectedinherited |
If set to N>=2, only 1 out of N observations will be saved to m_objList.
Definition at line 139 of file CGenericSensor.h.
Referenced by mrpt::hwdrivers::CGenericSensor::appendObservations(), and mrpt::hwdrivers::CGenericSensor::loadConfig().
◆ m_grab_decimation_counter
|
protectedinherited |
Used when "m_grab_decimation" is enabled.
Definition at line 146 of file CGenericSensor.h.
Referenced by mrpt::hwdrivers::CGenericSensor::appendObservations(), and mrpt::hwdrivers::CGenericSensor::loadConfig().
◆ m_hardwareError
|
privateinherited |
Definition at line 49 of file C2DRangeFinderAbstract.h.
Referenced by mrpt::hwdrivers::C2DRangeFinderAbstract::getObservation().
◆ m_ip
|
private |
Definition at line 129 of file CLMS100eth.h.
◆ m_lastObservation
|
privateinherited |
Definition at line 47 of file C2DRangeFinderAbstract.h.
Referenced by mrpt::hwdrivers::C2DRangeFinderAbstract::getObservation().
◆ m_lastObservationIsNew
|
privateinherited |
Definition at line 48 of file C2DRangeFinderAbstract.h.
Referenced by mrpt::hwdrivers::C2DRangeFinderAbstract::getObservation().
◆ m_lstExclusionAngles
|
privateinherited |
A list of pairs of angles <init,end> such as all sensor ranges falling in those forbiden angles will be marked as invalid.
Definition at line 64 of file C2DRangeFinderAbstract.h.
Referenced by mrpt::hwdrivers::C2DRangeFinderAbstract::filterByExclusionAngles(), and mrpt::hwdrivers::C2DRangeFinderAbstract::loadCommonParams().
◆ m_lstExclusionPolys
|
privateinherited |
A list of optional exclusion polygons, in coordinates relative to the vehicle, that is, taking into account the "sensorPose".
Definition at line 61 of file C2DRangeFinderAbstract.h.
Referenced by mrpt::hwdrivers::C2DRangeFinderAbstract::filterByExclusionAreas(), and mrpt::hwdrivers::C2DRangeFinderAbstract::loadCommonParams().
◆ m_max_queue_len
|
protectedinherited |
See CGenericSensor.
Definition at line 136 of file CGenericSensor.h.
Referenced by mrpt::hwdrivers::CGenericSensor::loadConfig().
◆ m_maxRange
|
private |
Definition at line 140 of file CLMS100eth.h.
◆ m_nextObservation
|
privateinherited |
A dynamic object used as buffer in doProcess.
Definition at line 56 of file C2DRangeFinderAbstract.h.
Referenced by mrpt::hwdrivers::C2DRangeFinderAbstract::doProcess().
◆ m_objList
|
privateinherited |
The queue of objects to be returned by getObservations.
Definition at line 121 of file CGenericSensor.h.
Referenced by mrpt::hwdrivers::CGenericSensor::appendObservations(), mrpt::hwdrivers::CGenericSensor::getObservations(), and mrpt::hwdrivers::CGenericSensor::~CGenericSensor().
◆ m_path_for_external_images
|
protectedinherited |
The path where to save off-rawlog images: empty means save images embedded in the rawlog.
Definition at line 155 of file CGenericSensor.h.
Referenced by mrpt::hwdrivers::CSwissRanger3DCamera::getNextObservation(), and mrpt::hwdrivers::CSwissRanger3DCamera::setPathForExternalImages().
◆ m_port
|
private |
Definition at line 130 of file CLMS100eth.h.
◆ m_process_rate
|
protectedinherited |
See CGenericSensor.
Definition at line 134 of file CGenericSensor.h.
Referenced by mrpt::hwdrivers::CGenericSensor::getProcessRate(), mrpt::hwdrivers::CGyroKVHDSP3000::initialize(), and mrpt::hwdrivers::CGenericSensor::loadConfig().
◆ m_scanFrequency
|
private |
Definition at line 135 of file CLMS100eth.h.
◆ m_sensorLabel
|
protectedinherited |
See CGenericSensor.
Definition at line 141 of file CGenericSensor.h.
Referenced by mrpt::hwdrivers::CCANBusReader::CCANBusReader(), mrpt::hwdrivers::CGPSInterface::CGPSInterface(), mrpt::hwdrivers::CGyroKVHDSP3000::CGyroKVHDSP3000(), mrpt::hwdrivers::CHokuyoURG::CHokuyoURG(), mrpt::hwdrivers::CIMUIntersense::CIMUIntersense(), mrpt::hwdrivers::CIMUXSens::CIMUXSens(), mrpt::hwdrivers::CIMUXSens_MT4::CIMUXSens_MT4(), mrpt::hwdrivers::CKinect::CKinect(), mrpt::hwdrivers::CNationalInstrumentsDAQ::CNationalInstrumentsDAQ(), mrpt::hwdrivers::CRoboPeakLidar::CRoboPeakLidar(), mrpt::hwdrivers::CSickLaserSerial::CSickLaserSerial(), mrpt::hwdrivers::CSickLaserUSB::CSickLaserUSB(), mrpt::hwdrivers::CSkeletonTracker::CSkeletonTracker(), mrpt::hwdrivers::CSwissRanger3DCamera::CSwissRanger3DCamera(), mrpt::hwdrivers::CVelodyneScanner::CVelodyneScanner(), mrpt::hwdrivers::CGyroKVHDSP3000::doProcess(), mrpt::hwdrivers::CIMUIntersense::doProcess(), mrpt::hwdrivers::CIMUXSens::doProcess(), mrpt::hwdrivers::CIMUXSens_MT4::doProcess(), mrpt::hwdrivers::CSkeletonTracker::doProcess(), mrpt::hwdrivers::CHokuyoURG::doProcessSimple(), mrpt::hwdrivers::CRoboPeakLidar::doProcessSimple(), mrpt::hwdrivers::CSickLaserSerial::doProcessSimple(), mrpt::hwdrivers::CSickLaserUSB::doProcessSimple(), mrpt::hwdrivers::CCANBusReader::doProcessSimple(), mrpt::hwdrivers::CGPSInterface::flushParsedMessagesNow(), mrpt::hwdrivers::CKinect::getNextObservation(), mrpt::hwdrivers::CSwissRanger3DCamera::getNextObservation(), mrpt::hwdrivers::CVelodyneScanner::getNextObservation(), mrpt::hwdrivers::CGenericSensor::getSensorLabel(), mrpt::hwdrivers::CNationalInstrumentsDAQ::grabbing_thread(), mrpt::hwdrivers::CGenericSensor::loadConfig(), mrpt::hwdrivers::C2DRangeFinderAbstract::processPreview(), mrpt::hwdrivers::CSkeletonTracker::processPreview(), mrpt::hwdrivers::CSkeletonTracker::processPreviewNone(), and mrpt::hwdrivers::CGenericSensor::setSensorLabel().
◆ m_sensorPose
|
private |
Definition at line 139 of file CLMS100eth.h.
◆ m_showPreview
|
privateinherited |
If true, shows a 3D window with a preview of the grabber data.
Definition at line 67 of file C2DRangeFinderAbstract.h.
Referenced by mrpt::hwdrivers::C2DRangeFinderAbstract::loadCommonParams(), mrpt::hwdrivers::C2DRangeFinderAbstract::processPreview(), and mrpt::hwdrivers::C2DRangeFinderAbstract::showPreview().
◆ m_startAngle
|
private |
Definition at line 137 of file CLMS100eth.h.
◆ m_state
|
protectedinherited |
Definition at line 148 of file CGenericSensor.h.
Referenced by mrpt::hwdrivers::CGyroKVHDSP3000::CGyroKVHDSP3000(), mrpt::hwdrivers::C2DRangeFinderAbstract::doProcess(), mrpt::hwdrivers::CGPSInterface::doProcess(), mrpt::hwdrivers::CGyroKVHDSP3000::doProcess(), mrpt::hwdrivers::CIMUIntersense::doProcess(), mrpt::hwdrivers::CIMUXSens::doProcess(), mrpt::hwdrivers::CIMUXSens_MT4::doProcess(), mrpt::hwdrivers::CKinect::doProcess(), mrpt::hwdrivers::CNationalInstrumentsDAQ::doProcess(), mrpt::hwdrivers::CSkeletonTracker::doProcess(), mrpt::hwdrivers::CSwissRanger3DCamera::doProcess(), mrpt::hwdrivers::CVelodyneScanner::doProcess(), mrpt::hwdrivers::CHokuyoURG::doProcessSimple(), mrpt::hwdrivers::CSickLaserSerial::doProcessSimple(), mrpt::hwdrivers::CSickLaserUSB::doProcessSimple(), mrpt::hwdrivers::CCANBusReader::doProcessSimple(), mrpt::hwdrivers::CGPSInterface::flushParsedMessagesNow(), mrpt::hwdrivers::CVelodyneScanner::getNextObservation(), mrpt::hwdrivers::CGenericSensor::getState(), mrpt::hwdrivers::CGyroKVHDSP3000::initialize(), mrpt::hwdrivers::CIMUIntersense::initialize(), mrpt::hwdrivers::CIMUXSens::initialize(), mrpt::hwdrivers::CIMUXSens_MT4::initialize(), mrpt::hwdrivers::CSkeletonTracker::initialize(), mrpt::hwdrivers::CVelodyneScanner::initialize(), mrpt::hwdrivers::CNationalInstrumentsDAQ::readFromDAQ(), and mrpt::hwdrivers::CIMUXSens::searchPortAndConnect().
◆ m_stopAngle
|
private |
Definition at line 138 of file CLMS100eth.h.
◆ m_stream
|
protectedinherited |
The I/O channel (will be nullptr if not bound).
Definition at line 72 of file C2DRangeFinderAbstract.h.
Referenced by mrpt::hwdrivers::CHokuyoURG::assureBufferHasBytes(), mrpt::hwdrivers::C2DRangeFinderAbstract::bindIO(), mrpt::hwdrivers::CHokuyoURG::checkCOMisOpen(), mrpt::hwdrivers::CHokuyoURG::displaySensorInfo(), mrpt::hwdrivers::CHokuyoURG::displayVersionInfo(), mrpt::hwdrivers::CHokuyoURG::enableSCIP20(), mrpt::hwdrivers::CSickLaserSerial::LMS_endContinuousMode(), mrpt::hwdrivers::CSickLaserSerial::LMS_sendMeasuringMode_cm_mm(), mrpt::hwdrivers::CSickLaserSerial::LMS_setupBaudrate(), mrpt::hwdrivers::CSickLaserSerial::LMS_setupSerialComms(), mrpt::hwdrivers::CSickLaserSerial::LMS_startContinuousMode(), mrpt::hwdrivers::CSickLaserSerial::LMS_statusQuery(), mrpt::hwdrivers::CSickLaserSerial::LMS_waitACK(), mrpt::hwdrivers::CSickLaserSerial::LMS_waitIncomingFrame(), mrpt::hwdrivers::CHokuyoURG::purgeBuffers(), mrpt::hwdrivers::CSickLaserSerial::SendCommandToSICK(), mrpt::hwdrivers::CHokuyoURG::setHighBaudrate(), mrpt::hwdrivers::CHokuyoURG::setHighSensitivityMode(), mrpt::hwdrivers::CHokuyoURG::setMotorSpeed(), mrpt::hwdrivers::CHokuyoURG::startScanningMode(), mrpt::hwdrivers::CHokuyoURG::switchLaserOff(), mrpt::hwdrivers::CHokuyoURG::switchLaserOn(), mrpt::hwdrivers::CSickLaserSerial::tryToOpenComms(), mrpt::hwdrivers::CHokuyoURG::turnOn(), mrpt::hwdrivers::CSickLaserSerial::waitContinuousSampleFrame(), mrpt::hwdrivers::CHokuyoURG::~CHokuyoURG(), and mrpt::hwdrivers::CSickLaserSerial::~CSickLaserSerial().
◆ m_turnedOn
|
private |
Definition at line 132 of file CLMS100eth.h.
◆ m_verbose
|
protectedinherited |
Definition at line 149 of file CGenericSensor.h.
Referenced by mrpt::hwdrivers::CGenericSensor::CGenericSensor(), mrpt::hwdrivers::CRoboPeakLidar::checkCOMMs(), mrpt::hwdrivers::CGPSInterface::doProcess(), mrpt::hwdrivers::CNTRIPEmitter::doProcess(), mrpt::hwdrivers::CGenericSensor::enableVerbose(), mrpt::hwdrivers::CNationalInstrumentsDAQ::grabbing_thread(), mrpt::hwdrivers::CIMUXSens_MT4::initialize(), mrpt::hwdrivers::CVelodyneScanner::internal_read_PCAP_packet(), mrpt::hwdrivers::CGenericSensor::isVerboseEnabled(), mrpt::hwdrivers::CGPSInterface::JAVAD_sendMessage(), mrpt::hwdrivers::CGPSInterface::legacy_topcon_setup_commands(), mrpt::hwdrivers::CGPSInterface::OnConnectionEstablished(), mrpt::hwdrivers::CGPSInterface::OnConnectionShutdown(), mrpt::hwdrivers::CNationalInstrumentsDAQ::stop(), and mrpt::hwdrivers::CGPSInterface::tryToOpenTheCOM().
◆ m_win
|
privateinherited |
Definition at line 68 of file C2DRangeFinderAbstract.h.
Referenced by mrpt::hwdrivers::C2DRangeFinderAbstract::processPreview().