Detailed Description
template<typename tree_t>
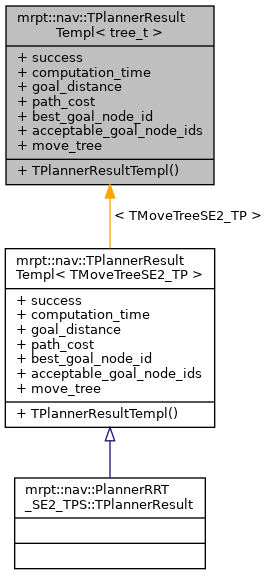
struct mrpt::nav::TPlannerResultTempl< tree_t >
Definition at line 40 of file PlannerRRT_common.h.
#include <mrpt/nav/planners/PlannerRRT_common.h>
Public Member Functions | |
| TPlannerResultTempl () | |
Public Attributes | |
| bool | success |
| Whether the target was reached or not. More... | |
| double | computation_time |
| Time spent (in secs) More... | |
| double | goal_distance |
| Distance from best found path to goal. More... | |
| double | path_cost |
| Total cost of the best found path (cost ~~ Euclidean distance) More... | |
| mrpt::graphs::TNodeID | best_goal_node_id |
| The ID of the best target node in the tree. More... | |
| std::set< mrpt::graphs::TNodeID > | acceptable_goal_node_ids |
The set of target nodes within an acceptable distance to target (including best_goal_node_id and others) More... | |
| tree_t | move_tree |
| The generated motion tree that explores free space starting at "start". More... | |
Constructor & Destructor Documentation
◆ TPlannerResultTempl()
|
inline |
Definition at line 59 of file PlannerRRT_common.h.
Member Data Documentation
◆ acceptable_goal_node_ids
| std::set<mrpt::graphs::TNodeID> mrpt::nav::TPlannerResultTempl< tree_t >::acceptable_goal_node_ids |
The set of target nodes within an acceptable distance to target (including best_goal_node_id and others)
Definition at line 54 of file PlannerRRT_common.h.
Referenced by mrpt::nav::PlannerRRT_SE2_TPS::solve().
◆ best_goal_node_id
| mrpt::graphs::TNodeID mrpt::nav::TPlannerResultTempl< tree_t >::best_goal_node_id |
The ID of the best target node in the tree.
Definition at line 51 of file PlannerRRT_common.h.
Referenced by mrpt::nav::PlannerRRT_SE2_TPS::solve().
◆ computation_time
| double mrpt::nav::TPlannerResultTempl< tree_t >::computation_time |
Time spent (in secs)
Definition at line 45 of file PlannerRRT_common.h.
Referenced by mrpt::nav::PlannerRRT_SE2_TPS::solve().
◆ goal_distance
| double mrpt::nav::TPlannerResultTempl< tree_t >::goal_distance |
Distance from best found path to goal.
Definition at line 47 of file PlannerRRT_common.h.
Referenced by mrpt::nav::PlannerRRT_SE2_TPS::solve().
◆ move_tree
| tree_t mrpt::nav::TPlannerResultTempl< tree_t >::move_tree |
The generated motion tree that explores free space starting at "start".
Definition at line 57 of file PlannerRRT_common.h.
Referenced by mrpt::nav::PlannerTPS_VirtualBase::renderMoveTree(), and mrpt::nav::PlannerRRT_SE2_TPS::solve().
◆ path_cost
| double mrpt::nav::TPlannerResultTempl< tree_t >::path_cost |
Total cost of the best found path (cost ~~ Euclidean distance)
Definition at line 49 of file PlannerRRT_common.h.
Referenced by mrpt::nav::PlannerRRT_SE2_TPS::solve().
◆ success
| bool mrpt::nav::TPlannerResultTempl< tree_t >::success |
Whether the target was reached or not.
Definition at line 43 of file PlannerRRT_common.h.
Referenced by mrpt::nav::PlannerRRT_SE2_TPS::solve().