Detailed Description
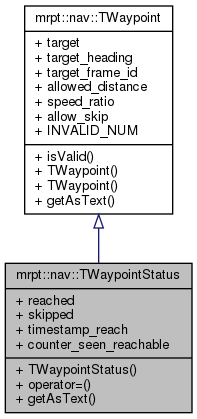
A waypoint with an execution status.
Definition at line 96 of file TWaypoint.h.
#include <mrpt/nav/reactive/TWaypoint.h>
Public Member Functions | |
| TWaypointStatus () | |
| TWaypointStatus & | operator= (const TWaypoint &wp) |
| std::string | getAsText () const |
| Gets navigation params as a human-readable format. More... | |
| bool | isValid () const |
| Check whether all the minimum mandatory fields have been filled by the user. More... | |
Public Attributes | |
| bool | reached |
| Whether this waypoint has been reached already (to within the allowed distance as per user specifications) or skipped. More... | |
| bool | skipped |
If reached==true this boolean tells whether the waypoint was physically reached (false) or marked as reached because it was skipped (true). More... | |
| mrpt::system::TTimeStamp | timestamp_reach |
| Timestamp of when this waypoint was reached. (Default=INVALID_TIMESTAMP means not reached so far) More... | |
| int | counter_seen_reachable |
| (Initialized to 0 automatically) How many times this waypoint has been seen as "reachable" before it being the current active waypoint. More... | |
| mrpt::math::TPoint2D | target |
| [Must be set by the user] Coordinates of desired target location (world/global coordinates). More... | |
| double | target_heading |
| [Default=any heading] Optionally, set to the desired orientation [radians] of the robot at this waypoint. More... | |
| std::string | target_frame_id |
| (Default="map") Frame ID in which target is given. Optional, use only for submapping applications. More... | |
| double | allowed_distance |
| [Must be set by the user] How close should the robot get to this waypoint for it to be considered reached. More... | |
| double | speed_ratio |
| (Default=1.0) Desired robot speed at the target, as a ratio of the full robot speed. More... | |
| bool | allow_skip |
| [Default=true] Whether it is allowed to the navigator to proceed to a more advanced waypoint in the sequence if it determines that it is easier to skip this one (e.g. More... | |
Static Public Attributes | |
| static const double | INVALID_NUM = std::numeric_limits<double>::max() |
| The default value of fields (used to detect non-set values) More... | |
Constructor & Destructor Documentation
◆ TWaypointStatus()
| TWaypointStatus::TWaypointStatus | ( | ) |
Definition at line 94 of file TWaypoint.cpp.
Member Function Documentation
◆ getAsText()
| std::string TWaypointStatus::getAsText | ( | ) | const |
Gets navigation params as a human-readable format.
Definition at line 106 of file TWaypoint.cpp.
References mrpt::mrpt::format(), mrpt::nav::TWaypoint::getAsText(), and reached.
Referenced by mrpt::nav::CWaypointsNavigator::checkHasReachedTarget().
◆ isValid()
|
inherited |
Check whether all the minimum mandatory fields have been filled by the user.
Definition at line 45 of file TWaypoint.cpp.
References mrpt::nav::TWaypoint::allowed_distance, mrpt::nav::TWaypoint::INVALID_NUM, mrpt::nav::TWaypoint::target, mrpt::math::TPoint2D::x, and mrpt::math::TPoint2D::y.
◆ operator=()
| TWaypointStatus & TWaypointStatus::operator= | ( | const TWaypoint & | wp | ) |
Definition at line 101 of file TWaypoint.cpp.
Member Data Documentation
◆ allow_skip
|
inherited |
[Default=true] Whether it is allowed to the navigator to proceed to a more advanced waypoint in the sequence if it determines that it is easier to skip this one (e.g.
it seems blocked by dynamic obstacles). This value is ignored for the last waypoint in a sequence, since it is always considered to be the ultimate goal and hence not subject to be skipped.
Definition at line 52 of file TWaypoint.h.
Referenced by mrpt::nav::TWaypoint::getAsText().
◆ allowed_distance
|
inherited |
[Must be set by the user] How close should the robot get to this waypoint for it to be considered reached.
Definition at line 38 of file TWaypoint.h.
Referenced by mrpt::nav::TWaypoint::getAsText(), mrpt::nav::TWaypoint::isValid(), and mrpt::nav::CWaypointsNavigator::waypoints_navigationStep().
◆ counter_seen_reachable
| int mrpt::nav::TWaypointStatus::counter_seen_reachable |
(Initialized to 0 automatically) How many times this waypoint has been seen as "reachable" before it being the current active waypoint.
Definition at line 101 of file TWaypoint.h.
◆ INVALID_NUM
|
staticinherited |
The default value of fields (used to detect non-set values)
Definition at line 59 of file TWaypoint.h.
Referenced by mrpt::nav::TWaypointSequence::getAsOpenglVisualization(), mrpt::nav::TWaypointStatusSequence::getAsOpenglVisualization(), mrpt::nav::TWaypoint::getAsText(), mrpt::nav::TWaypoint::isValid(), mrpt::nav::TWaypointSequence::load(), and mrpt::nav::CWaypointsNavigator::waypoints_navigationStep().
◆ reached
| bool mrpt::nav::TWaypointStatus::reached |
Whether this waypoint has been reached already (to within the allowed distance as per user specifications) or skipped.
Definition at line 98 of file TWaypoint.h.
Referenced by mrpt::nav::CWaypointsNavigator::checkHasReachedTarget(), and getAsText().
◆ skipped
| bool mrpt::nav::TWaypointStatus::skipped |
If reached==true this boolean tells whether the waypoint was physically reached (false) or marked as reached because it was skipped (true).
Definition at line 99 of file TWaypoint.h.
◆ speed_ratio
|
inherited |
(Default=1.0) Desired robot speed at the target, as a ratio of the full robot speed.
That is: speed_ratio=1 means that the user wants the robot to navigate to the target and smoothly continue to the next one when reached. speed_ratio=0 on the other hand means that the robot should approach this waypoint slowing down and end up totally stopped.
Definition at line 45 of file TWaypoint.h.
Referenced by mrpt::nav::TWaypoint::getAsText(), and mrpt::nav::CWaypointsNavigator::waypoints_navigationStep().
◆ target
|
inherited |
[Must be set by the user] Coordinates of desired target location (world/global coordinates).
- See also
- target_heading
Definition at line 30 of file TWaypoint.h.
Referenced by mrpt::nav::TWaypoint::getAsText(), mrpt::nav::TWaypoint::isValid(), and mrpt::nav::CWaypointsNavigator::waypoints_navigationStep().
◆ target_frame_id
|
inherited |
(Default="map") Frame ID in which target is given. Optional, use only for submapping applications.
Definition at line 36 of file TWaypoint.h.
Referenced by mrpt::nav::CWaypointsNavigator::waypoints_navigationStep().
◆ target_heading
|
inherited |
[Default=any heading] Optionally, set to the desired orientation [radians] of the robot at this waypoint.
Some navigator implementations may ignore this preferred heading anyway, read the docs of each implementation to find it out.
Definition at line 34 of file TWaypoint.h.
Referenced by mrpt::nav::TWaypoint::getAsText(), and mrpt::nav::CWaypointsNavigator::waypoints_navigationStep().
◆ timestamp_reach
| mrpt::system::TTimeStamp mrpt::nav::TWaypointStatus::timestamp_reach |
Timestamp of when this waypoint was reached. (Default=INVALID_TIMESTAMP means not reached so far)
Definition at line 100 of file TWaypoint.h.