Detailed Description
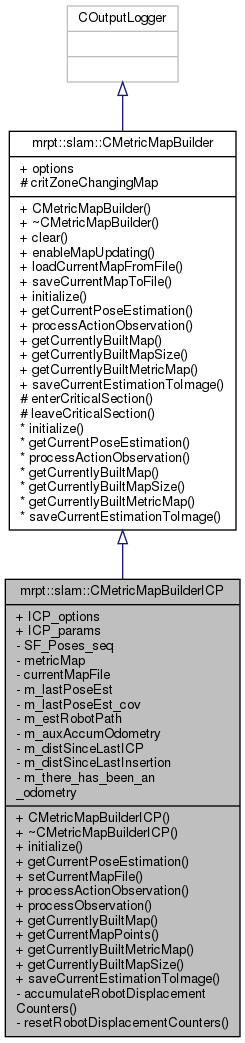
A class for very simple 2D SLAM based on ICP.
This is a non-probabilistic pose tracking algorithm. Map are stored as in files as binary dumps of "mrpt::maps::CSimpleMap" objects. The methods are thread-safe.
Definition at line 28 of file CMetricMapBuilderICP.h.
#include <mrpt/slam/CMetricMapBuilderICP.h>
Classes | |
| struct | TConfigParams |
| Algorithm configuration params. More... | |
| struct | TDist |
| Traveled distances from last map update / ICP-based localization. More... | |
Public Member Functions | |
| CMetricMapBuilderICP () | |
| Default constructor - Upon construction, you can set the parameters in ICP_options, then call "initialize". More... | |
| virtual | ~CMetricMapBuilderICP () |
| Destructor: More... | |
| void | initialize (const mrpt::maps::CSimpleMap &initialMap=mrpt::maps::CSimpleMap(), mrpt::poses::CPosePDF *x0=NULL) MRPT_OVERRIDE |
| Initialize the method, starting with a known location PDF "x0"(if supplied, set to NULL to left unmodified) and a given fixed, past map. More... | |
| mrpt::poses::CPose3DPDFPtr | getCurrentPoseEstimation () const MRPT_OVERRIDE |
| Returns a copy of the current best pose estimation as a pose PDF. More... | |
| void | setCurrentMapFile (const char *mapFile) |
| Sets the "current map file", thus that map will be loaded if it exists or a new one will be created if it does not, and the updated map will be save to that file when destroying the object. More... | |
| void | processActionObservation (mrpt::obs::CActionCollection &action, mrpt::obs::CSensoryFrame &in_SF) MRPT_OVERRIDE |
| Appends a new action and observations to update this map: See the description of the class at the top of this page to see a more complete description. More... | |
| void | processObservation (const mrpt::obs::CObservationPtr &obs) |
| The main method of this class: Process one odometry or sensor observation. More... | |
| void | getCurrentlyBuiltMap (mrpt::maps::CSimpleMap &out_map) const MRPT_OVERRIDE |
| Fills "out_map" with the set of "poses"-"sensory-frames", thus the so far built map. More... | |
| void | getCurrentMapPoints (std::vector< float > &x, std::vector< float > &y) |
| Returns the 2D points of current local map. More... | |
| const mrpt::maps::CMultiMetricMap * | getCurrentlyBuiltMetricMap () const MRPT_OVERRIDE |
| Returns the map built so far. More... | |
| unsigned int | getCurrentlyBuiltMapSize () MRPT_OVERRIDE |
| Returns just how many sensory-frames are stored in the currently build map. More... | |
| void | saveCurrentEstimationToImage (const std::string &file, bool formatEMF_BMP=true) MRPT_OVERRIDE |
| A useful method for debugging: the current map (and/or poses) estimation is dumped to an image file. More... | |
| void | clear () |
| Clear all elements of the maps, and reset localization to (0,0,0deg). More... | |
| void | enableMapUpdating (bool enable) |
| Enables or disables the map updating (default state is enabled) More... | |
| void | loadCurrentMapFromFile (const std::string &fileName) |
| Load map (mrpt::maps::CSimpleMap) from a ".simplemap" file. More... | |
| void | saveCurrentMapToFile (const std::string &fileName, bool compressGZ=true) const |
| Save map (mrpt::maps::CSimpleMap) to a ".simplemap" file. More... | |
Public Attributes | |
| TConfigParams | ICP_options |
| Options for the ICP-SLAM application. More... | |
| CICP::TConfigParams | ICP_params |
| Options for the ICP algorithm itself. More... | |
| TOptions | options |
Protected Member Functions | |
| void | enterCriticalSection () |
| Enter critical section for map updating. More... | |
| void | leaveCriticalSection () |
| Leave critical section for map updating. More... | |
Protected Attributes | |
| mrpt::synch::CCriticalSection | critZoneChangingMap |
| Critical zones. More... | |
Private Member Functions | |
| void | accumulateRobotDisplacementCounters (const mrpt::poses::CPose2D &new_pose) |
| void | resetRobotDisplacementCounters (const mrpt::poses::CPose2D &new_pose) |
Private Attributes | |
| mrpt::maps::CSimpleMap | SF_Poses_seq |
| The set of observations that leads to current map: More... | |
| mrpt::maps::CMultiMetricMap | metricMap |
| The metric map representation as a points map: More... | |
| std::string | currentMapFile |
| Current map file. More... | |
| mrpt::poses::CRobot2DPoseEstimator | m_lastPoseEst |
| The pose estimation by the alignment algorithm (ICP). More... | |
| mrpt::math::CMatrixDouble33 | m_lastPoseEst_cov |
| Last pose estimation (covariance) More... | |
| std::deque< mrpt::math::TPose2D > | m_estRobotPath |
| The estimated robot path: More... | |
| mrpt::poses::CPose2D | m_auxAccumOdometry |
| TDist | m_distSinceLastICP |
| mrpt::aligned_containers< std::string, TDist >::map_t | m_distSinceLastInsertion |
| Indexed by sensor label. More... | |
| bool | m_there_has_been_an_odometry |
Constructor & Destructor Documentation
◆ CMetricMapBuilderICP()
| CMetricMapBuilderICP::CMetricMapBuilderICP | ( | ) |
Default constructor - Upon construction, you can set the parameters in ICP_options, then call "initialize".
Definition at line 32 of file CMetricMapBuilderICP.cpp.
References initialize().
◆ ~CMetricMapBuilderICP()
|
virtual |
Destructor:
Definition at line 42 of file CMetricMapBuilderICP.cpp.
References mrpt::slam::CMetricMapBuilder::enterCriticalSection(), mrpt::slam::CMetricMapBuilder::leaveCriticalSection(), and setCurrentMapFile().
Member Function Documentation
◆ accumulateRobotDisplacementCounters()
|
private |
Definition at line 598 of file CMetricMapBuilderICP.cpp.
References m_distSinceLastICP, m_distSinceLastInsertion, and mrpt::slam::CMetricMapBuilderICP::TDist::updateDistances().
Referenced by processObservation().
◆ clear()
|
inherited |
Clear all elements of the maps, and reset localization to (0,0,0deg).
Definition at line 42 of file CMetricMapBuilder.cpp.
References mrpt::slam::CMetricMapBuilder::initialize(), and MRPT_LOG_DEBUG.
◆ enableMapUpdating()
|
inlineinherited |
Enables or disables the map updating (default state is enabled)
Definition at line 88 of file CMetricMapBuilder.h.
◆ enterCriticalSection()
|
inlineprotectedinherited |
Enter critical section for map updating.
Definition at line 40 of file CMetricMapBuilder.h.
References mrpt::synch::CCriticalSection::enter().
Referenced by getCurrentMapPoints(), and ~CMetricMapBuilderICP().
◆ getCurrentlyBuiltMap()
|
virtual |
Fills "out_map" with the set of "poses"-"sensory-frames", thus the so far built map.
Implements mrpt::slam::CMetricMapBuilder.
Definition at line 520 of file CMetricMapBuilderICP.cpp.
References SF_Poses_seq.
◆ getCurrentlyBuiltMapSize()
|
virtual |
Returns just how many sensory-frames are stored in the currently build map.
Implements mrpt::slam::CMetricMapBuilder.
Definition at line 535 of file CMetricMapBuilderICP.cpp.
References SF_Poses_seq, and mrpt::maps::CSimpleMap::size().
◆ getCurrentlyBuiltMetricMap()
|
virtual |
Returns the map built so far.
NOTE that for efficiency a pointer to the internal object is passed, DO NOT delete nor modify the object in any way, if desired, make a copy of ir with "duplicate()".
Implements mrpt::slam::CMetricMapBuilder.
Definition at line 526 of file CMetricMapBuilderICP.cpp.
References metricMap.
◆ getCurrentMapPoints()
| void CMetricMapBuilderICP::getCurrentMapPoints | ( | std::vector< float > & | x, |
| std::vector< float > & | y | ||
| ) |
Returns the 2D points of current local map.
Definition at line 503 of file CMetricMapBuilderICP.cpp.
References ASSERT_, mrpt::slam::CMetricMapBuilder::enterCriticalSection(), mrpt::slam::CMetricMapBuilder::leaveCriticalSection(), mrpt::maps::CMultiMetricMap::m_pointsMaps, metricMap, and mrpt::maps::CMultiMetricMap::ProxyFilterContainerByClass< SELECTED_CLASS_PTR, CONTAINER >::size().
◆ getCurrentPoseEstimation()
|
virtual |
Returns a copy of the current best pose estimation as a pose PDF.
Implements mrpt::slam::CMetricMapBuilder.
Definition at line 424 of file CMetricMapBuilderICP.cpp.
References mrpt::poses::CPosePDFGaussian::cov, mrpt::poses::CRobot2DPoseEstimator::getLatestRobotPose(), m_lastPoseEst, m_lastPoseEst_cov, and mrpt::poses::CPosePDFGaussian::mean.
◆ initialize()
|
virtual |
Initialize the method, starting with a known location PDF "x0"(if supplied, set to NULL to left unmodified) and a given fixed, past map.
This method MUST be called if using the default constructor, after loading the configuration into ICP_options. In particular, TConfigParams::mapInitializers
Implements mrpt::slam::CMetricMapBuilder.
Definition at line 438 of file CMetricMapBuilderICP.cpp.
References mrpt::slam::CMetricMapBuilderICP::TDist::ang, mrpt::slam::CMetricMapBuilder::critZoneChangingMap, mrpt::maps::CSimpleMap::get(), mrpt::utils::CProbabilityDensityFunction< TDATA, STATE_LEN >::getMeanVal(), ICP_options, mrpt::slam::CMetricMapBuilderICP::TDist::lin, m_auxAccumOdometry, m_distSinceLastICP, m_distSinceLastInsertion, m_estRobotPath, m_lastPoseEst, m_there_has_been_an_odometry, mrpt::slam::CMetricMapBuilderICP::TConfigParams::mapInitializers, metricMap, MRPT_END, MRPT_LOG_INFO, MRPT_START, mrpt::system::now(), mrpt::poses::CRobot2DPoseEstimator::processUpdateNewPoseLocalization(), mrpt::poses::CRobot2DPoseEstimator::reset(), mrpt::maps::CMultiMetricMap::setListOfMaps(), SF_Poses_seq, and mrpt::maps::CSimpleMap::size().
Referenced by CMetricMapBuilderICP().
◆ leaveCriticalSection()
|
inlineprotectedinherited |
Leave critical section for map updating.
Definition at line 42 of file CMetricMapBuilder.h.
References mrpt::synch::CCriticalSection::leave().
Referenced by getCurrentMapPoints(), and ~CMetricMapBuilderICP().
◆ loadCurrentMapFromFile()
|
inherited |
Load map (mrpt::maps::CSimpleMap) from a ".simplemap" file.
Definition at line 56 of file CMetricMapBuilder.cpp.
References mrpt::maps::CSimpleMap::clear(), mrpt::system::fileExists(), mrpt::slam::CMetricMapBuilder::initialize(), MRPT_LOG_INFO_STREAM, and MRPT_LOG_WARN_STREAM.
Referenced by setCurrentMapFile().
◆ processActionObservation()
|
virtual |
Appends a new action and observations to update this map: See the description of the class at the top of this page to see a more complete description.
- Parameters
-
action The estimation of the incremental pose change in the robot pose. in_SF The set of observations that robot senses at the new pose. See params in CMetricMapBuilder::options and CMetricMapBuilderICP::ICP_options
- See also
- processObservation
Implements mrpt::slam::CMetricMapBuilder.
Definition at line 381 of file CMetricMapBuilderICP.cpp.
References mrpt::obs::CSensoryFrame::begin(), mrpt::poses::CPose2D::composeFrom(), mrpt::obs::CObservationOdometry::Create(), mrpt::obs::CSensoryFrame::end(), mrpt::obs::CActionCollection::getBestMovementEstimation(), m_auxAccumOdometry, and processObservation().
◆ processObservation()
| void CMetricMapBuilderICP::processObservation | ( | const mrpt::obs::CObservationPtr & | obs | ) |
The main method of this class: Process one odometry or sensor observation.
The new entry point of the algorithm (the old one was processActionObservation, which now is a wrapper to this method). See params in CMetricMapBuilder::options and CMetricMapBuilderICP::ICP_options
Definition at line 118 of file CMetricMapBuilderICP.cpp.
References accumulateRobotDisplacementCounters(), mrpt::slam::CMetricMapsAlignmentAlgorithm::Align(), mrpt::maps::CPointsMap::TInsertionOptions::also_interpolate, mrpt::slam::CMetricMapBuilder::TOptions::alwaysInsertByClass, mrpt::slam::CMetricMapBuilderICP::TDist::ang, ASSERT_, ASSERTMSG_, mrpt::poses::CPose2D::asString(), mrpt::utils::CListOfClasses::contains(), mrpt::poses::CPosePDFGaussian::copyFrom(), mrpt::poses::CPosePDFGaussian::cov, mrpt::obs::CSensoryFrame::Create(), mrpt::slam::CMetricMapBuilder::critZoneChangingMap, mrpt::maps::CMultiMetricMap::ProxyFilterContainerByClass< SELECTED_CLASS_PTR, CONTAINER >::empty(), empty(), mrpt::slam::CMetricMapBuilder::TOptions::enableMapUpdating, mrpt::format(), mrpt::mrpt::format(), mrpt::system::formatTimeInterval(), mrpt::poses::CRobot2DPoseEstimator::getCurrentEstimate(), mrpt::poses::CRobot2DPoseEstimator::getLatestRobotPose(), mrpt::utils::CProbabilityDensityFunction< TDATA, STATE_LEN >::getMeanVal(), mrpt::slam::CICP::TReturnInfo::goodness, ICP_options, ICP_params, mrpt::maps::CSimpleMap::insert(), mrpt::slam::CMetricMapBuilderICP::TConfigParams::insertionAngDistance, mrpt::slam::CMetricMapBuilderICP::TConfigParams::insertionLinDistance, mrpt::maps::CPointsMap::insertionOptions, mrpt::maps::CMetricMap::insertObservationPtr(), INVALID_TIMESTAMP, IS_CLASS, IS_DERIVED, mrpt::maps::CMetricMap::isEmpty(), mrpt::slam::CMetricMapBuilderICP::TDist::lin, mrpt::slam::CMetricMapBuilderICP::TConfigParams::localizationAngDistance, mrpt::slam::CMetricMapBuilderICP::TConfigParams::localizationLinDistance, m_distSinceLastICP, m_distSinceLastInsertion, m_estRobotPath, mrpt::maps::CMultiMetricMap::m_gridMaps, m_lastPoseEst, m_lastPoseEst_cov, mrpt::maps::CMultiMetricMap::m_pointsMaps, m_there_has_been_an_odometry, mrpt::slam::CMetricMapBuilderICP::TConfigParams::matchAgainstTheGrid, mrpt::poses::CPosePDFGaussian::mean, metricMap, min, mrpt::maps::CPointsMap::TInsertionOptions::minDistBetweenLaserPoints, mrpt::slam::CMetricMapBuilderICP::TConfigParams::minICPgoodnessToAccept, MRPT_END, MRPT_LOG_DEBUG, MRPT_LOG_DEBUG_STREAM, MRPT_LOG_INFO, MRPT_LOG_INFO_STREAM, MRPT_LOG_WARN, MRPT_LOG_WARN_STREAM, MRPT_START, mrpt::slam::CICP::TReturnInfo::nIterations, mrpt::slam::CICP::options, mrpt::slam::CMetricMapBuilder::options, mrpt::poses::CRobot2DPoseEstimator::processUpdateNewOdometry(), mrpt::poses::CRobot2DPoseEstimator::processUpdateNewPoseLocalization(), resetRobotDisplacementCounters(), SF_Poses_seq, mrpt::maps::CMultiMetricMap::ProxyFilterContainerByClass< SELECTED_CLASS_PTR, CONTAINER >::size(), mrpt::utils::CTicTac::Tac(), mrpt::utils::CTicTac::Tic(), and mrpt::slam::CMetricMapBuilderICP::TDist::updatePose().
Referenced by processActionObservation().
◆ resetRobotDisplacementCounters()
|
private |
Definition at line 606 of file CMetricMapBuilderICP.cpp.
References m_distSinceLastICP, m_distSinceLastInsertion, and mrpt::slam::CMetricMapBuilderICP::TDist::updatePose().
Referenced by processObservation().
◆ saveCurrentEstimationToImage()
|
virtual |
A useful method for debugging: the current map (and/or poses) estimation is dumped to an image file.
- Parameters
-
file The output file name formatEMF_BMP Output format = true:EMF, false:BMP
Implements mrpt::slam::CMetricMapBuilder.
Definition at line 543 of file CMetricMapBuilderICP.cpp.
References ASSERT_, mrpt::utils::CEnhancedMetaFile::drawImage(), mrpt::utils::CEnhancedMetaFile::line(), m_estRobotPath, mrpt::maps::CMultiMetricMap::m_gridMaps, metricMap, MRPT_END, MRPT_START, mrpt::maps::CMultiMetricMap::ProxyFilterContainerByClass< SELECTED_CLASS_PTR, CONTAINER >::size(), and THROW_EXCEPTION.
◆ saveCurrentMapToFile()
|
inherited |
Save map (mrpt::maps::CSimpleMap) to a ".simplemap" file.
Definition at line 82 of file CMetricMapBuilder.cpp.
References CFileGZOutputStream, mrpt::slam::CMetricMapBuilder::getCurrentlyBuiltMap(), and MRPT_LOG_INFO_STREAM.
Referenced by setCurrentMapFile().
◆ setCurrentMapFile()
| void CMetricMapBuilderICP::setCurrentMapFile | ( | const char * | mapFile | ) |
Sets the "current map file", thus that map will be loaded if it exists or a new one will be created if it does not, and the updated map will be save to that file when destroying the object.
Definition at line 406 of file CMetricMapBuilderICP.cpp.
References currentMapFile, mrpt::slam::CMetricMapBuilder::loadCurrentMapFromFile(), and mrpt::slam::CMetricMapBuilder::saveCurrentMapToFile().
Referenced by ~CMetricMapBuilderICP().
Member Data Documentation
◆ critZoneChangingMap
|
protectedinherited |
Critical zones.
Definition at line 38 of file CMetricMapBuilder.h.
Referenced by initialize(), mrpt::slam::CMetricMapBuilderRBPF::initialize(), mrpt::slam::CMetricMapBuilderRBPF::processActionObservation(), and processObservation().
◆ currentMapFile
|
private |
Current map file.
Definition at line 129 of file CMetricMapBuilderICP.h.
Referenced by setCurrentMapFile().
◆ ICP_options
| TConfigParams mrpt::slam::CMetricMapBuilderICP::ICP_options |
Options for the ICP-SLAM application.
- See also
- ICP_params
Definition at line 68 of file CMetricMapBuilderICP.h.
Referenced by initialize(), and processObservation().
◆ ICP_params
| CICP::TConfigParams mrpt::slam::CMetricMapBuilderICP::ICP_params |
Options for the ICP algorithm itself.
- See also
- ICP_options
Definition at line 69 of file CMetricMapBuilderICP.h.
Referenced by processObservation().
◆ m_auxAccumOdometry
|
private |
Definition at line 138 of file CMetricMapBuilderICP.h.
Referenced by initialize(), and processActionObservation().
◆ m_distSinceLastICP
|
private |
Definition at line 151 of file CMetricMapBuilderICP.h.
Referenced by accumulateRobotDisplacementCounters(), initialize(), processObservation(), and resetRobotDisplacementCounters().
◆ m_distSinceLastInsertion
|
private |
Indexed by sensor label.
Definition at line 152 of file CMetricMapBuilderICP.h.
Referenced by accumulateRobotDisplacementCounters(), initialize(), processObservation(), and resetRobotDisplacementCounters().
◆ m_estRobotPath
|
private |
The estimated robot path:
Definition at line 137 of file CMetricMapBuilderICP.h.
Referenced by initialize(), processObservation(), and saveCurrentEstimationToImage().
◆ m_lastPoseEst
|
private |
The pose estimation by the alignment algorithm (ICP).
Last pose estimation (Mean)
Definition at line 132 of file CMetricMapBuilderICP.h.
Referenced by getCurrentPoseEstimation(), initialize(), and processObservation().
◆ m_lastPoseEst_cov
|
private |
Last pose estimation (covariance)
Definition at line 133 of file CMetricMapBuilderICP.h.
Referenced by getCurrentPoseEstimation(), and processObservation().
◆ m_there_has_been_an_odometry
|
private |
Definition at line 153 of file CMetricMapBuilderICP.h.
Referenced by initialize(), and processObservation().
◆ metricMap
|
private |
The metric map representation as a points map:
Definition at line 126 of file CMetricMapBuilderICP.h.
Referenced by getCurrentlyBuiltMetricMap(), getCurrentMapPoints(), initialize(), processObservation(), and saveCurrentEstimationToImage().
◆ options
|
inherited |
Definition at line 124 of file CMetricMapBuilder.h.
Referenced by mrpt::slam::CMetricMapBuilderRBPF::processActionObservation(), and processObservation().
◆ SF_Poses_seq
|
private |
The set of observations that leads to current map:
Definition at line 123 of file CMetricMapBuilderICP.h.
Referenced by getCurrentlyBuiltMap(), getCurrentlyBuiltMapSize(), initialize(), and processObservation().