Detailed Description
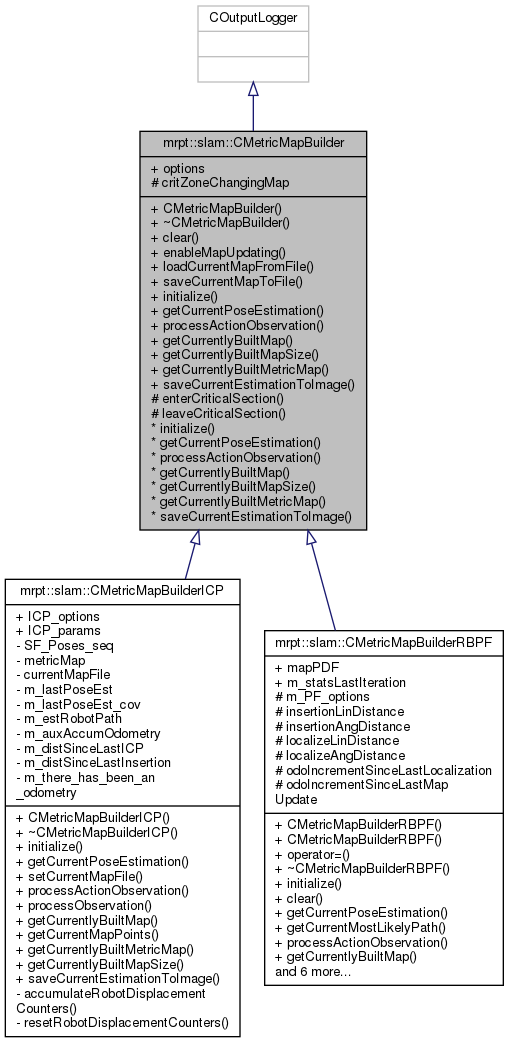
This virtual class is the base for SLAM implementations.
See derived classes for more information.
- See also
- CMetricMap
Definition at line 35 of file CMetricMapBuilder.h.
#include <mrpt/slam/CMetricMapBuilder.h>
Classes | |
| struct | TOptions |
| Options for the algorithm. More... | |
Public Member Functions | |
| CMetricMapBuilder () | |
| Constructor. More... | |
| virtual | ~CMetricMapBuilder () |
| Destructor. More... | |
| void | clear () |
| Clear all elements of the maps, and reset localization to (0,0,0deg). More... | |
| void | enableMapUpdating (bool enable) |
| Enables or disables the map updating (default state is enabled) More... | |
| void | loadCurrentMapFromFile (const std::string &fileName) |
| Load map (mrpt::maps::CSimpleMap) from a ".simplemap" file. More... | |
| void | saveCurrentMapToFile (const std::string &fileName, bool compressGZ=true) const |
| Save map (mrpt::maps::CSimpleMap) to a ".simplemap" file. More... | |
Pure virtual methods to implement in any particular SLAM algorithm | |
| virtual void | initialize (const mrpt::maps::CSimpleMap &initialMap=mrpt::maps::CSimpleMap(), mrpt::poses::CPosePDF *x0=NULL)=0 |
| Initialize the method, starting with a known location PDF "x0"(if supplied, set to NULL to left unmodified) and a given fixed, past map. More... | |
| virtual mrpt::poses::CPose3DPDFPtr | getCurrentPoseEstimation () const =0 |
| Returns a copy of the current best pose estimation as a pose PDF. More... | |
| virtual void | processActionObservation (mrpt::obs::CActionCollection &action, mrpt::obs::CSensoryFrame &observations)=0 |
| Process a new action and observations pair to update this map: See the description of the class at the top of this page to see a more complete description. More... | |
| virtual void | getCurrentlyBuiltMap (mrpt::maps::CSimpleMap &out_map) const =0 |
| Fills "out_map" with the set of "poses"-"sensory-frames", thus the so far built map. More... | |
| virtual unsigned int | getCurrentlyBuiltMapSize ()=0 |
| Returns just how many sensory-frames are stored in the currently build map. More... | |
| virtual const mrpt::maps::CMultiMetricMap * | getCurrentlyBuiltMetricMap () const =0 |
| Returns the map built so far. More... | |
| virtual void | saveCurrentEstimationToImage (const std::string &file, bool formatEMF_BMP=true)=0 |
| A useful method for debugging: the current map (and/or poses) estimation is dumped to an image file. More... | |
Public Attributes | |
| TOptions | options |
Protected Member Functions | |
| void | enterCriticalSection () |
| Enter critical section for map updating. More... | |
| void | leaveCriticalSection () |
| Leave critical section for map updating. More... | |
Protected Attributes | |
| mrpt::synch::CCriticalSection | critZoneChangingMap |
| Critical zones. More... | |
Constructor & Destructor Documentation
◆ CMetricMapBuilder()
| CMetricMapBuilder::CMetricMapBuilder | ( | ) |
◆ ~CMetricMapBuilder()
|
virtual |
Member Function Documentation
◆ clear()
| void CMetricMapBuilder::clear | ( | ) |
Clear all elements of the maps, and reset localization to (0,0,0deg).
Definition at line 42 of file CMetricMapBuilder.cpp.
References initialize(), and MRPT_LOG_DEBUG.
◆ enableMapUpdating()
|
inline |
Enables or disables the map updating (default state is enabled)
Definition at line 88 of file CMetricMapBuilder.h.
◆ enterCriticalSection()
|
inlineprotected |
Enter critical section for map updating.
Definition at line 40 of file CMetricMapBuilder.h.
References mrpt::synch::CCriticalSection::enter().
Referenced by mrpt::slam::CMetricMapBuilderICP::getCurrentMapPoints(), and mrpt::slam::CMetricMapBuilderICP::~CMetricMapBuilderICP().
◆ getCurrentlyBuiltMap()
|
pure virtual |
Fills "out_map" with the set of "poses"-"sensory-frames", thus the so far built map.
Implemented in mrpt::slam::CMetricMapBuilderRBPF, and mrpt::slam::CMetricMapBuilderICP.
Referenced by saveCurrentMapToFile().
◆ getCurrentlyBuiltMapSize()
|
pure virtual |
Returns just how many sensory-frames are stored in the currently build map.
Implemented in mrpt::slam::CMetricMapBuilderRBPF, and mrpt::slam::CMetricMapBuilderICP.
◆ getCurrentlyBuiltMetricMap()
|
pure virtual |
Returns the map built so far.
NOTE that for efficiency a pointer to the internal object is passed, DO NOT delete nor modify the object in any way, if desired, make a copy of ir with "duplicate()".
Implemented in mrpt::slam::CMetricMapBuilderRBPF, and mrpt::slam::CMetricMapBuilderICP.
◆ getCurrentPoseEstimation()
|
pure virtual |
Returns a copy of the current best pose estimation as a pose PDF.
Implemented in mrpt::slam::CMetricMapBuilderRBPF, and mrpt::slam::CMetricMapBuilderICP.
◆ initialize()
|
pure virtual |
Initialize the method, starting with a known location PDF "x0"(if supplied, set to NULL to left unmodified) and a given fixed, past map.
Implemented in mrpt::slam::CMetricMapBuilderRBPF, and mrpt::slam::CMetricMapBuilderICP.
Referenced by clear(), and loadCurrentMapFromFile().
◆ leaveCriticalSection()
|
inlineprotected |
Leave critical section for map updating.
Definition at line 42 of file CMetricMapBuilder.h.
References mrpt::synch::CCriticalSection::leave().
Referenced by mrpt::slam::CMetricMapBuilderICP::getCurrentMapPoints(), and mrpt::slam::CMetricMapBuilderICP::~CMetricMapBuilderICP().
◆ loadCurrentMapFromFile()
| void CMetricMapBuilder::loadCurrentMapFromFile | ( | const std::string & | fileName | ) |
Load map (mrpt::maps::CSimpleMap) from a ".simplemap" file.
Definition at line 56 of file CMetricMapBuilder.cpp.
References mrpt::maps::CSimpleMap::clear(), mrpt::system::fileExists(), initialize(), MRPT_LOG_INFO_STREAM, and MRPT_LOG_WARN_STREAM.
Referenced by mrpt::slam::CMetricMapBuilderICP::setCurrentMapFile().
◆ processActionObservation()
|
pure virtual |
Process a new action and observations pair to update this map: See the description of the class at the top of this page to see a more complete description.
- Parameters
-
action The estimation of the incremental pose change in the robot pose. observations The set of observations that robot senses at the new pose.
Implemented in mrpt::slam::CMetricMapBuilderRBPF, and mrpt::slam::CMetricMapBuilderICP.
◆ saveCurrentEstimationToImage()
|
pure virtual |
A useful method for debugging: the current map (and/or poses) estimation is dumped to an image file.
- Parameters
-
file The output file name formatEMF_BMP Output format = true:EMF, false:BMP
Implemented in mrpt::slam::CMetricMapBuilderRBPF, and mrpt::slam::CMetricMapBuilderICP.
◆ saveCurrentMapToFile()
| void CMetricMapBuilder::saveCurrentMapToFile | ( | const std::string & | fileName, |
| bool | compressGZ = true |
||
| ) | const |
Save map (mrpt::maps::CSimpleMap) to a ".simplemap" file.
Definition at line 82 of file CMetricMapBuilder.cpp.
References CFileGZOutputStream, getCurrentlyBuiltMap(), and MRPT_LOG_INFO_STREAM.
Referenced by mrpt::slam::CMetricMapBuilderICP::setCurrentMapFile().
Member Data Documentation
◆ critZoneChangingMap
|
protected |
Critical zones.
Definition at line 38 of file CMetricMapBuilder.h.
Referenced by mrpt::slam::CMetricMapBuilderICP::initialize(), mrpt::slam::CMetricMapBuilderRBPF::initialize(), mrpt::slam::CMetricMapBuilderRBPF::processActionObservation(), and mrpt::slam::CMetricMapBuilderICP::processObservation().
◆ options
| TOptions mrpt::slam::CMetricMapBuilder::options |
Definition at line 124 of file CMetricMapBuilder.h.
Referenced by mrpt::slam::CMetricMapBuilderRBPF::processActionObservation(), and mrpt::slam::CMetricMapBuilderICP::processObservation().