Detailed Description
template<class GRAPH_T = typename mrpt::graphs::CNetworkOfPoses2DInf>
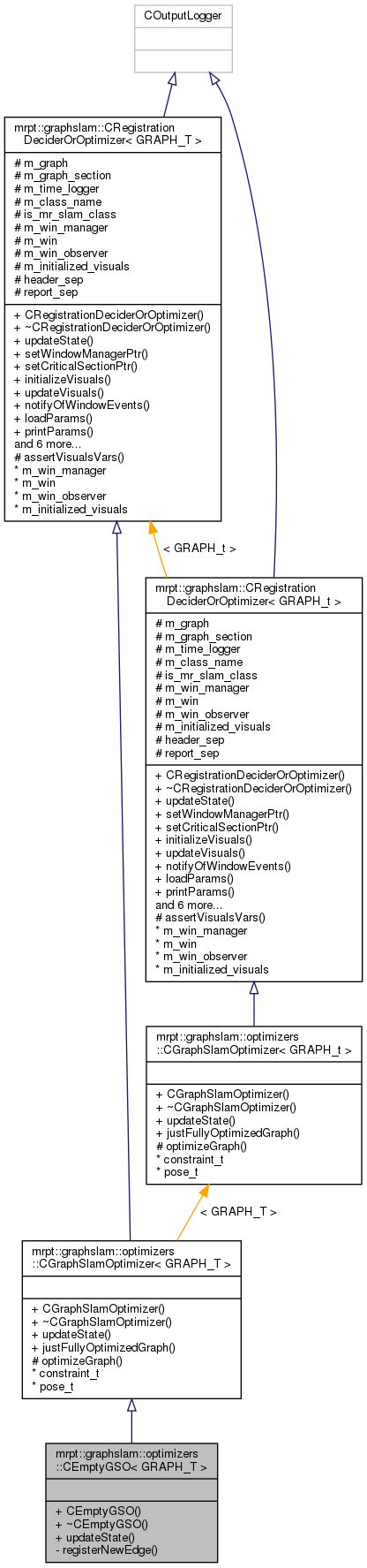
class mrpt::graphslam::optimizers::CEmptyGSO< GRAPH_T >
Empty Edge Registration Decider.
Handy when you are testing other parts of the application but not the specific registration procedure
Definition at line 27 of file CEmptyGSO.h.
#include <mrpt/graphslam/GSO/CEmptyGSO.h>
Public Types | |
| typedef GRAPH_T::constraint_t | constraint_t |
| typedef GRAPH_T ::constraint_t::type_value | pose_t |
Public Member Functions | |
| CEmptyGSO () | |
| ~CEmptyGSO () | |
| bool | updateState (mrpt::obs::CActionCollectionPtr action, mrpt::obs::CSensoryFramePtr observations, mrpt::obs::CObservationPtr observation) |
| Generic method for fetching the incremental action/observation readings from the calling function. More... | |
| virtual bool | justFullyOptimizedGraph () const |
| Used by the caller to query for possible full graph optimization on the latest optimizer run. More... | |
| virtual void | setWindowManagerPtr (mrpt::graphslam::CWindowManager *win_manager) |
| Fetch a CWindowManager pointer. More... | |
| virtual void | setCriticalSectionPtr (mrpt::synch::CCriticalSection *graph_section) |
| Fetch a mrpt::synch::CCriticalSection for locking the GRAPH_T resource. More... | |
| virtual void | initializeVisuals () |
| Initialize visual objects in CDisplayWindow (e.g. More... | |
| virtual void | updateVisuals () |
| Update the relevant visual features in CDisplayWindow. More... | |
| virtual void | notifyOfWindowEvents (const std::map< std::string, bool > &events_occurred) |
| Get a list of the window events that happened since the last call. More... | |
| virtual void | loadParams (const std::string &source_fname) |
| Load the necessary for the decider/optimizer configuration parameters. More... | |
| virtual void | printParams () const |
| Print the problem parameters - relevant to the decider/optimizer to the screen in a unified/compact way. More... | |
| virtual void | getDescriptiveReport (std::string *report_str) const |
| Fill the provided string with a detailed report of the decider/optimizer state. More... | |
| virtual void | setGraphPtr (GRAPH_T *graph) |
| Fetch the graph on which the decider/optimizer will work on. More... | |
| virtual void | initializeLoggers (const std::string &name) |
| Initialize the COutputLogger, CTimeLogger instances given the name of the decider/optimizer at hand. More... | |
| virtual void | setClassName (const std::string &name) |
| bool | isMultiRobotSlamClass () |
| std::string | getClassName () const |
Protected Member Functions | |
| virtual void | optimizeGraph ()=0 |
| method called for optimizing the underlying graph. More... | |
| virtual void | assertVisualsVars () |
| Handy function for making all the visuals assertions in a compact manner. More... | |
Protected Attributes | |
| GRAPH_T * | m_graph |
| Pointer to the graph that is under construction. More... | |
| mrpt::synch::CCriticalSection * | m_graph_section |
| mrpt::utils::CTimeLogger | m_time_logger |
| Time logger instance. More... | |
| std::string | m_class_name |
| Name of the class instance. More... | |
| bool | is_mr_slam_class |
| Boolean indicating if the current class can be used in multi-robot SLAM operations. More... | |
Visuals-related variables methods | |
| mrpt::graphslam::CWindowManager * | m_win_manager |
| Pointer to the CWindowManager object used to store visuals-related instances. More... | |
| mrpt::gui::CDisplayWindow3D * | m_win |
| Window to use. More... | |
| mrpt::graphslam::CWindowObserver * | m_win_observer |
| CWindowObserver object for monitoring various visual-oriented events. More... | |
| bool | m_initialized_visuals |
Static Protected Attributes | |
| static const std::string | header_sep = std::string(80, '-') |
| Separator string to be used in debugging messages. More... | |
| static const std::string | report_sep = std::string(2, '\n') |
Private Member Functions | |
| void | registerNewEdge (const mrpt::utils::TNodeID &from, const mrpt::utils::TNodeID &to, const constraint_t &rel_edge) |
Member Typedef Documentation
◆ constraint_t
| typedef GRAPH_T::constraint_t mrpt::graphslam::optimizers::CEmptyGSO< GRAPH_T >::constraint_t |
Definition at line 31 of file CEmptyGSO.h.
◆ pose_t
|
inherited |
Definition at line 47 of file CGraphSlamOptimizer.h.
Constructor & Destructor Documentation
◆ CEmptyGSO()
| mrpt::graphslam::optimizers::CEmptyGSO< GRAPH_T >::CEmptyGSO | ( | ) |
Definition at line 51 of file CEmptyGSO.h.
◆ ~CEmptyGSO()
| mrpt::graphslam::optimizers::CEmptyGSO< GRAPH_T >::~CEmptyGSO | ( | ) |
Definition at line 53 of file CEmptyGSO.h.
Member Function Documentation
◆ assertVisualsVars()
|
protectedvirtualinherited |
Handy function for making all the visuals assertions in a compact manner.
Definition at line 87 of file CRegistrationDeciderOrOptimizer_impl.h.
◆ getClassName()
|
inlineinherited |
Definition at line 138 of file CRegistrationDeciderOrOptimizer.h.
◆ getDescriptiveReport()
|
virtualinherited |
Fill the provided string with a detailed report of the decider/optimizer state.
Report should include (part of) the following:
- Timing of important methods
- Properties fo class at the current time
- Logging of commands until current time
Reimplemented in mrpt::graphslam::deciders::CLoopCloserERD< GRAPH_T >, mrpt::graphslam::optimizers::CLevMarqGSO< GRAPH_T >, mrpt::graphslam::deciders::CICPCriteriaERD< GRAPH_T >, mrpt::graphslam::deciders::CICPCriteriaNRD< GRAPH_T >, mrpt::graphslam::deciders::CFixedIntervalsNRD< GRAPH_T >, mrpt::graphslam::deciders::CNodeRegistrationDecider< GRAPH_T >, mrpt::graphslam::deciders::CNodeRegistrationDecider< GRAPH_t >, mrpt::graphslam::deciders::CEdgeRegistrationDecider< GRAPH_T >, and mrpt::graphslam::deciders::CEdgeRegistrationDecider< GRAPH_t >.
Definition at line 116 of file CRegistrationDeciderOrOptimizer_impl.h.
Referenced by mrpt::graphslam::optimizers::CLevMarqGSO< GRAPH_T >::getDescriptiveReport().
◆ initializeLoggers()
|
virtualinherited |
Initialize the COutputLogger, CTimeLogger instances given the name of the decider/optimizer at hand.
Definition at line 38 of file CRegistrationDeciderOrOptimizer_impl.h.
Referenced by mrpt::graphslam::deciders::CICPCriteriaERD< GRAPH_T >::CICPCriteriaERD(), mrpt::graphslam::deciders::CICPCriteriaNRD< GRAPH_T >::CICPCriteriaNRD(), mrpt::graphslam::optimizers::CLevMarqGSO< GRAPH_T >::CLevMarqGSO(), and mrpt::graphslam::deciders::CLoopCloserERD< GRAPH_T >::CLoopCloserERD().
◆ initializeVisuals()
|
virtualinherited |
Initialize visual objects in CDisplayWindow (e.g.
add an object to scene).
- Exceptions
-
std::exception If the method is called without having first provided a CDisplayWindow3D* to the class instance
- See also
- setWindowManagerPtr, updateVisuals
Reimplemented in mrpt::graphslam::deciders::CLoopCloserERD< GRAPH_T >, mrpt::graphslam::optimizers::CLevMarqGSO< GRAPH_T >, and mrpt::graphslam::deciders::CICPCriteriaERD< GRAPH_T >.
Definition at line 81 of file CRegistrationDeciderOrOptimizer_impl.h.
Referenced by mrpt::graphslam::deciders::CICPCriteriaERD< GRAPH_T >::initializeVisuals(), and mrpt::graphslam::optimizers::CLevMarqGSO< GRAPH_T >::initializeVisuals().
◆ isMultiRobotSlamClass()
|
inherited |
Definition at line 132 of file CRegistrationDeciderOrOptimizer_impl.h.
◆ justFullyOptimizedGraph()
|
inlinevirtualinherited |
Used by the caller to query for possible full graph optimization on the latest optimizer run.
Reimplemented in mrpt::graphslam::optimizers::CLevMarqGSO< GRAPH_T >.
Definition at line 70 of file CGraphSlamOptimizer.h.
◆ loadParams()
|
virtualinherited |
Load the necessary for the decider/optimizer configuration parameters.
Reimplemented in mrpt::graphslam::deciders::CLoopCloserERD< GRAPH_T >, mrpt::graphslam::optimizers::CLevMarqGSO< GRAPH_T >, mrpt::graphslam::deciders::CICPCriteriaERD< GRAPH_T >, mrpt::graphslam::deciders::CICPCriteriaNRD< GRAPH_T >, mrpt::graphslam::deciders::CFixedIntervalsNRD< GRAPH_T >, and mrpt::graphslam::deciders::CRangeScanEdgeRegistrationDecider< GRAPH_T >.
Definition at line 105 of file CRegistrationDeciderOrOptimizer_impl.h.
Referenced by mrpt::graphslam::deciders::CICPCriteriaNRD< GRAPH_T >::loadParams(), and mrpt::graphslam::optimizers::CLevMarqGSO< GRAPH_T >::loadParams().
◆ notifyOfWindowEvents()
|
virtualinherited |
Get a list of the window events that happened since the last call.
Method in derived classes is automatically called from the CGraphSlamEngine_t instance. After that, decider/optimizer should just fetch the parameters that it is interested in.
Reimplemented in mrpt::graphslam::deciders::CLoopCloserERD< GRAPH_T >, mrpt::graphslam::optimizers::CLevMarqGSO< GRAPH_T >, and mrpt::graphslam::deciders::CICPCriteriaERD< GRAPH_T >.
Definition at line 99 of file CRegistrationDeciderOrOptimizer_impl.h.
Referenced by mrpt::graphslam::deciders::CICPCriteriaERD< GRAPH_T >::notifyOfWindowEvents(), and mrpt::graphslam::optimizers::CLevMarqGSO< GRAPH_T >::notifyOfWindowEvents().
◆ optimizeGraph()
|
protectedpure virtualinherited |
method called for optimizing the underlying graph.
Implemented in mrpt::graphslam::optimizers::CLevMarqGSO< GRAPH_T >.
◆ printParams()
|
virtualinherited |
Print the problem parameters - relevant to the decider/optimizer to the screen in a unified/compact way.
Reimplemented in mrpt::graphslam::deciders::CLoopCloserERD< GRAPH_T >, mrpt::graphslam::optimizers::CLevMarqGSO< GRAPH_T >, mrpt::graphslam::deciders::CICPCriteriaERD< GRAPH_T >, mrpt::graphslam::deciders::CICPCriteriaNRD< GRAPH_T >, mrpt::graphslam::deciders::CFixedIntervalsNRD< GRAPH_T >, and mrpt::graphslam::deciders::CRangeScanEdgeRegistrationDecider< GRAPH_T >.
Definition at line 111 of file CRegistrationDeciderOrOptimizer_impl.h.
Referenced by mrpt::graphslam::deciders::CICPCriteriaNRD< GRAPH_T >::printParams(), and mrpt::graphslam::optimizers::CLevMarqGSO< GRAPH_T >::printParams().
◆ registerNewEdge()
|
private |
Definition at line 62 of file CEmptyGSO.h.
◆ setClassName()
|
virtualinherited |
Definition at line 52 of file CRegistrationDeciderOrOptimizer_impl.h.
◆ setCriticalSectionPtr()
|
virtualinherited |
Fetch a mrpt::synch::CCriticalSection for locking the GRAPH_T resource.
Handy for realising multithreading in the derived classes.
- Warning
- Beware that prior to the decider/optimizer public method call, the CCriticalSection will already be locked from CGraphSlamEngine_t instance, but this isn't effective in multithreaded implementations where the decider/optimizer itself has to lock the function at which the extra thread runs.
Definition at line 73 of file CRegistrationDeciderOrOptimizer_impl.h.
◆ setGraphPtr()
|
virtualinherited |
Fetch the graph on which the decider/optimizer will work on.
Definition at line 124 of file CRegistrationDeciderOrOptimizer_impl.h.
◆ setWindowManagerPtr()
|
virtualinherited |
Fetch a CWindowManager pointer.
CWindowManager instance should contain a CDisplayWindow3D* and, optionally, a CWindowObserver pointer so that interaction with the window is possible
Reimplemented in mrpt::graphslam::deciders::CLoopCloserERD< GRAPH_T >.
Definition at line 61 of file CRegistrationDeciderOrOptimizer_impl.h.
◆ updateState()
|
virtual |
Generic method for fetching the incremental action/observation readings from the calling function.
Implementations of this interface should use (part of) the specified parameters and call the optimizeGraph function if the decision is to optimize the provided graph
- Returns
- True if the optimization procedure was executed.
Implements mrpt::graphslam::optimizers::CGraphSlamOptimizer< GRAPH_T >.
Definition at line 56 of file CEmptyGSO.h.
◆ updateVisuals()
|
virtualinherited |
Update the relevant visual features in CDisplayWindow.
- Exceptions
-
std::exception If the method is called without having first provided a CDisplayWindow3D* to the class instance
- See also
- setWindowManagerPtr, initializeVisuals
Reimplemented in mrpt::graphslam::deciders::CLoopCloserERD< GRAPH_T >, mrpt::graphslam::optimizers::CLevMarqGSO< GRAPH_T >, and mrpt::graphslam::deciders::CICPCriteriaERD< GRAPH_T >.
Definition at line 94 of file CRegistrationDeciderOrOptimizer_impl.h.
Referenced by mrpt::graphslam::deciders::CICPCriteriaERD< GRAPH_T >::updateVisuals(), and mrpt::graphslam::optimizers::CLevMarqGSO< GRAPH_T >::updateVisuals().
Member Data Documentation
◆ header_sep
|
staticprotectedinherited |
Separator string to be used in debugging messages.
Definition at line 175 of file CRegistrationDeciderOrOptimizer.h.
Referenced by mrpt::graphslam::deciders::CICPCriteriaNRD< GRAPH_T >::getDescriptiveReport(), mrpt::graphslam::deciders::CICPCriteriaERD< GRAPH_T >::getDescriptiveReport(), and mrpt::graphslam::optimizers::CLevMarqGSO< GRAPH_T >::getDescriptiveReport().
◆ is_mr_slam_class
|
protectedinherited |
Boolean indicating if the current class can be used in multi-robot SLAM operations.
Definition at line 171 of file CRegistrationDeciderOrOptimizer.h.
◆ m_class_name
|
protectedinherited |
Name of the class instance.
Definition at line 167 of file CRegistrationDeciderOrOptimizer.h.
Referenced by mrpt::graphslam::CRegistrationDeciderOrOptimizer< GRAPH_t >::getClassName().
◆ m_graph
|
protectedinherited |
Pointer to the graph that is under construction.
Definition at line 146 of file CRegistrationDeciderOrOptimizer.h.
Referenced by mrpt::graphslam::optimizers::CLevMarqGSO< GRAPH_T >::_optimizeGraph(), mrpt::graphslam::optimizers::CLevMarqGSO< GRAPH_T >::checkForLoopClosures(), mrpt::graphslam::deciders::CICPCriteriaERD< GRAPH_T >::checkRegistrationCondition2D(), mrpt::graphslam::deciders::CICPCriteriaERD< GRAPH_T >::checkRegistrationCondition3D(), mrpt::graphslam::deciders::CICPCriteriaERD< GRAPH_T >::getNearbyNodesOf(), mrpt::graphslam::optimizers::CLevMarqGSO< GRAPH_T >::getNearbyNodesOf(), mrpt::graphslam::deciders::CICPCriteriaERD< GRAPH_T >::registerNewEdge(), mrpt::graphslam::optimizers::CLevMarqGSO< GRAPH_T >::updateGraphVisualization(), mrpt::graphslam::optimizers::CLevMarqGSO< GRAPH_T >::updateOptDistanceVisualization(), mrpt::graphslam::deciders::CICPCriteriaERD< GRAPH_T >::updateState(), mrpt::graphslam::optimizers::CLevMarqGSO< GRAPH_T >::updateState(), and mrpt::graphslam::deciders::CICPCriteriaERD< GRAPH_T >::updateVisuals().
◆ m_graph_section
|
protectedinherited |
Definition at line 147 of file CRegistrationDeciderOrOptimizer.h.
Referenced by mrpt::graphslam::optimizers::CLevMarqGSO< GRAPH_T >::optimizeGraph().
◆ m_initialized_visuals
|
protectedinherited |
Definition at line 161 of file CRegistrationDeciderOrOptimizer.h.
◆ m_time_logger
|
protectedinherited |
Time logger instance.
Definition at line 165 of file CRegistrationDeciderOrOptimizer.h.
Referenced by mrpt::graphslam::optimizers::CLevMarqGSO< GRAPH_T >::_optimizeGraph(), mrpt::graphslam::deciders::CICPCriteriaERD< GRAPH_T >::checkRegistrationCondition2D(), mrpt::graphslam::deciders::CICPCriteriaERD< GRAPH_T >::checkRegistrationCondition3D(), mrpt::graphslam::deciders::CICPCriteriaNRD< GRAPH_T >::getDescriptiveReport(), mrpt::graphslam::deciders::CICPCriteriaERD< GRAPH_T >::getDescriptiveReport(), mrpt::graphslam::optimizers::CLevMarqGSO< GRAPH_T >::getDescriptiveReport(), mrpt::graphslam::deciders::CICPCriteriaERD< GRAPH_T >::initializeVisuals(), mrpt::graphslam::deciders::CICPCriteriaNRD< GRAPH_T >::updateState(), and mrpt::graphslam::deciders::CICPCriteriaERD< GRAPH_T >::updateVisuals().
◆ m_win
|
protectedinherited |
Window to use.
Definition at line 157 of file CRegistrationDeciderOrOptimizer.h.
Referenced by mrpt::graphslam::optimizers::CLevMarqGSO< GRAPH_T >::fitGraphInView(), mrpt::graphslam::deciders::CICPCriteriaERD< GRAPH_T >::initializeVisuals(), mrpt::graphslam::optimizers::CLevMarqGSO< GRAPH_T >::initOptDistanceVisualization(), mrpt::graphslam::optimizers::CLevMarqGSO< GRAPH_T >::toggleGraphVisualization(), mrpt::graphslam::deciders::CICPCriteriaERD< GRAPH_T >::toggleLaserScansVisualization(), mrpt::graphslam::optimizers::CLevMarqGSO< GRAPH_T >::toggleOptDistanceVisualization(), mrpt::graphslam::optimizers::CLevMarqGSO< GRAPH_T >::updateGraphVisualization(), mrpt::graphslam::optimizers::CLevMarqGSO< GRAPH_T >::updateOptDistanceVisualization(), and mrpt::graphslam::deciders::CICPCriteriaERD< GRAPH_T >::updateVisuals().
◆ m_win_manager
|
protectedinherited |
Pointer to the CWindowManager object used to store visuals-related instances.
Definition at line 155 of file CRegistrationDeciderOrOptimizer.h.
Referenced by mrpt::graphslam::optimizers::CLevMarqGSO< GRAPH_T >::initGraphVisualization(), mrpt::graphslam::deciders::CICPCriteriaERD< GRAPH_T >::initializeVisuals(), mrpt::graphslam::optimizers::CLevMarqGSO< GRAPH_T >::initOptDistanceVisualization(), mrpt::graphslam::deciders::CICPCriteriaERD< GRAPH_T >::toggleLaserScansVisualization(), mrpt::graphslam::optimizers::CLevMarqGSO< GRAPH_T >::updateGraphVisualization(), and mrpt::graphslam::optimizers::CLevMarqGSO< GRAPH_T >::updateOptDistanceVisualization().
◆ m_win_observer
|
protectedinherited |
CWindowObserver object for monitoring various visual-oriented events.
Definition at line 160 of file CRegistrationDeciderOrOptimizer.h.
Referenced by mrpt::graphslam::optimizers::CLevMarqGSO< GRAPH_T >::initGraphVisualization(), mrpt::graphslam::deciders::CICPCriteriaERD< GRAPH_T >::initializeVisuals(), and mrpt::graphslam::optimizers::CLevMarqGSO< GRAPH_T >::initOptDistanceVisualization().
◆ report_sep
|
staticprotectedinherited |
Definition at line 176 of file CRegistrationDeciderOrOptimizer.h.
Referenced by mrpt::graphslam::deciders::CICPCriteriaNRD< GRAPH_T >::getDescriptiveReport(), mrpt::graphslam::deciders::CICPCriteriaERD< GRAPH_T >::getDescriptiveReport(), and mrpt::graphslam::optimizers::CLevMarqGSO< GRAPH_T >::getDescriptiveReport().