Detailed Description
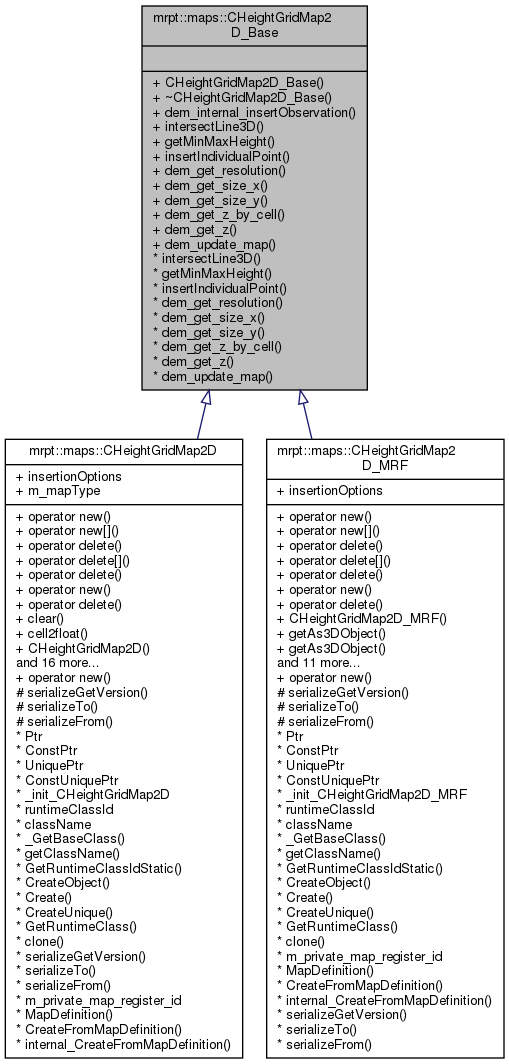
Virtual base class for Digital Elevation Model (DEM) maps.
See derived classes for details. This class implements those operations which are especific to DEMs.
Definition at line 22 of file CHeightGridMap2D_Base.h.
#include <mrpt/maps/CHeightGridMap2D_Base.h>
Classes | |
| struct | TPointInsertParams |
| Extra params for insertIndividualPoint() More... | |
Public Member Functions | |
| CHeightGridMap2D_Base () | |
| virtual | ~CHeightGridMap2D_Base () |
| bool | dem_internal_insertObservation (const mrpt::obs::CObservation *obs, const mrpt::poses::CPose3D *robotPose=nullptr) |
| Internal method called by internal_insertObservation() More... | |
Specific API for Digital Elevation Model (DEM) maps | |
| bool | intersectLine3D (const mrpt::math::TLine3D &r1, mrpt::math::TObject3D &obj) const |
| Gets the intersection between a 3D line and a Height Grid map (taking into account the different heights of each individual cell) More... | |
| bool | getMinMaxHeight (float &z_min, float &z_max) const |
| Computes the minimum and maximum height in the grid. More... | |
| virtual bool | insertIndividualPoint (const double x, const double y, const double z, const TPointInsertParams ¶ms=TPointInsertParams())=0 |
| Update the DEM with one new point. More... | |
| virtual double | dem_get_resolution () const =0 |
| virtual size_t | dem_get_size_x () const =0 |
| virtual size_t | dem_get_size_y () const =0 |
| virtual bool | dem_get_z_by_cell (const size_t cx, const size_t cy, double &z_out) const =0 |
| Get cell 'z' by (cx,cy) cell indices. More... | |
| virtual bool | dem_get_z (const double x, const double y, double &z_out) const =0 |
| Get cell 'z' (x,y) by metric coordinates. More... | |
| virtual void | dem_update_map ()=0 |
| Ensure that all observations are reflected in the map estimate. More... | |
Constructor & Destructor Documentation
◆ CHeightGridMap2D_Base()
| CHeightGridMap2D_Base::CHeightGridMap2D_Base | ( | ) |
Definition at line 26 of file CHeightGridMap2D_Base.cpp.
◆ ~CHeightGridMap2D_Base()
|
virtual |
Definition at line 27 of file CHeightGridMap2D_Base.cpp.
Member Function Documentation
◆ dem_get_resolution()
|
pure virtual |
Implemented in mrpt::maps::CHeightGridMap2D, and mrpt::maps::CHeightGridMap2D_MRF.
Referenced by intersectLine3D().
◆ dem_get_size_x()
|
pure virtual |
Implemented in mrpt::maps::CHeightGridMap2D, and mrpt::maps::CHeightGridMap2D_MRF.
Referenced by getMinMaxHeight().
◆ dem_get_size_y()
|
pure virtual |
Implemented in mrpt::maps::CHeightGridMap2D, and mrpt::maps::CHeightGridMap2D_MRF.
Referenced by getMinMaxHeight().
◆ dem_get_z()
|
pure virtual |
Get cell 'z' (x,y) by metric coordinates.
- Returns
- false if out of bounds or un-observed cell.
Implemented in mrpt::maps::CHeightGridMap2D, and mrpt::maps::CHeightGridMap2D_MRF.
Referenced by intersectLine3D().
◆ dem_get_z_by_cell()
|
pure virtual |
Get cell 'z' by (cx,cy) cell indices.
- Returns
- false if out of bounds or un-observed cell.
Implemented in mrpt::maps::CHeightGridMap2D, and mrpt::maps::CHeightGridMap2D_MRF.
Referenced by getMinMaxHeight().
◆ dem_internal_insertObservation()
| bool CHeightGridMap2D_Base::dem_internal_insertObservation | ( | const mrpt::obs::CObservation * | obs, |
| const mrpt::poses::CPose3D * | robotPose = nullptr |
||
| ) |
Internal method called by internal_insertObservation()
Definition at line 128 of file CHeightGridMap2D_Base.cpp.
References mrpt::obs::CObservation2DRangeScan::buildAuxPointsMap(), mrpt::maps::CPointsMap::changeCoordinatesReference(), dem_update_map(), mrpt::maps::CPointsMap::empty(), mrpt::maps::CPointsMap::getPoint(), insertIndividualPoint(), IS_CLASS, mrpt::maps::CPointsMap::loadFromVelodyneScan(), MRPT_END, MRPT_START, mrpt::maps::CPointsMap::size(), and mrpt::maps::CHeightGridMap2D_Base::TPointInsertParams::update_map_after_insertion.
Referenced by mrpt::maps::CHeightGridMap2D::internal_insertObservation().
◆ dem_update_map()
|
pure virtual |
Ensure that all observations are reflected in the map estimate.
Implemented in mrpt::maps::CHeightGridMap2D, and mrpt::maps::CHeightGridMap2D_MRF.
Referenced by dem_internal_insertObservation().
◆ getMinMaxHeight()
| bool CHeightGridMap2D_Base::getMinMaxHeight | ( | float & | z_min, |
| float & | z_max | ||
| ) | const |
Computes the minimum and maximum height in the grid.
- Returns
- False if there is no observed cell yet.
Definition at line 28 of file CHeightGridMap2D_Base.cpp.
References dem_get_size_x(), dem_get_size_y(), dem_get_z_by_cell(), mrpt::keep_max(), and mrpt::keep_min().
Referenced by mrpt::maps::CHeightGridMap2D::getAs3DObject(), and intersectLine3D().
◆ insertIndividualPoint()
|
pure virtual |
Update the DEM with one new point.
- See also
- mrpt::maps::CMetricMap::insertObservation() for inserting higher-level objects like 2D/3D LIDAR scans
- Returns
- true if updated OK, false if (x,y) is out of bounds
Implemented in mrpt::maps::CHeightGridMap2D, and mrpt::maps::CHeightGridMap2D_MRF.
Referenced by dem_internal_insertObservation().
◆ intersectLine3D()
| bool CHeightGridMap2D_Base::intersectLine3D | ( | const mrpt::math::TLine3D & | r1, |
| mrpt::math::TObject3D & | obj | ||
| ) | const |
Gets the intersection between a 3D line and a Height Grid map (taking into account the different heights of each individual cell)
Definition at line 57 of file CHeightGridMap2D_Base.cpp.
References dem_get_resolution(), dem_get_z(), getMinMaxHeight(), mrpt::math::TObject3D::getPoint(), mrpt::math::intersect(), min, MRPT_END, MRPT_START, mrpt::math::TPoint3D::norm(), mrpt::math::TPoint3D::x, mrpt::math::TPoint3D::y, and mrpt::math::TPoint3D::z.