Detailed Description
template<class Derived>
struct mrpt::maps::detail::loadFromRangeImpl< Derived >
Definition at line 23 of file CPointsMap_crtp_common.h.
#include <maps/CPointsMap_crtp_common.h>
Static Public Member Functions | |
| static void | templ_loadFromRangeScan (Derived &obj, const mrpt::obs::CObservation2DRangeScan &rangeScan, const mrpt::poses::CPose3D *robotPose) |
| static void | templ_loadFromRangeScan (Derived &obj, const mrpt::obs::CObservation3DRangeScan &rangeScan, const mrpt::poses::CPose3D *robotPose) |
Member Function Documentation
◆ templ_loadFromRangeScan() [1/2]
|
inlinestatic |
Definition at line 25 of file CPointsMap_crtp_common.h.
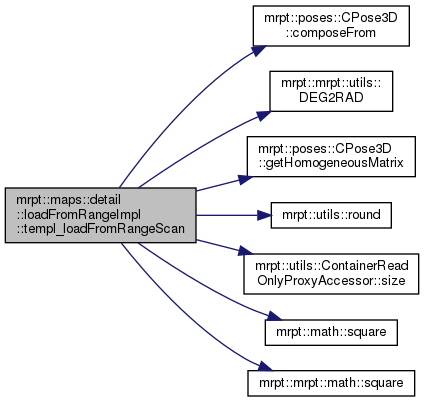
References mrpt::obs::CSinCosLookUpTableFor2DScans::TSinCosValues::ccos, mrpt::poses::CPose3D::composeFrom(), mrpt::obs::CSinCosLookUpTableFor2DScans::TSinCosValues::csin, mrpt::utils::DEG2RAD(), DEG2RAD, mrpt::poses::CPose3D::getHomogeneousMatrix(), mrpt::maps::CPointsMap::TLaserRange2DInsertContext::HM, mrpt::utils::round(), mrpt::obs::CObservation2DRangeScan::scan, mrpt::obs::CObservation2DRangeScan::sensorPose, mrpt::utils::ContainerReadOnlyProxyAccessor< STLCONTAINER >::size(), mrpt::math::square(), mrpt::poses::UNINITIALIZED_POSE, and mrpt::obs::CObservation2DRangeScan::validRange.
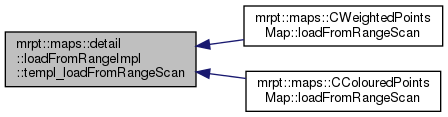
Referenced by mrpt::maps::CColouredPointsMap::loadFromRangeScan(), and mrpt::maps::CWeightedPointsMap::loadFromRangeScan().
◆ templ_loadFromRangeScan() [2/2]
|
inlinestatic |
Definition at line 371 of file CPointsMap_crtp_common.h.
References mrpt::poses::CPose3D::composeFrom(), mrpt::poses::CPose3D::getHomogeneousMatrix(), mrpt::obs::CObservation3DRangeScan::hasPoints3D, mrpt::maps::CPointsMap::TLaserRange3DInsertContext::HM, mrpt::obs::CObservation3DRangeScan::points3D_x, mrpt::obs::CObservation3DRangeScan::points3D_y, mrpt::obs::CObservation3DRangeScan::points3D_z, mrpt::maps::CPointsMap::TLaserRange3DInsertContext::scan_x, mrpt::maps::CPointsMap::TLaserRange3DInsertContext::scan_y, mrpt::maps::CPointsMap::TLaserRange3DInsertContext::scan_z, mrpt::obs::CObservation3DRangeScan::sensorPose, mrpt::math::square(), and mrpt::poses::UNINITIALIZED_POSE.
