Detailed Description
The list of landmarks: the wrapper class is just for maintaining the KD-Tree representation.
Definition at line 135 of file CLandmarksMap.h.
#include <mrpt/maps/CLandmarksMap.h>
Public Types | |
| typedef internal::TSequenceLandmarks::iterator | iterator |
| typedef internal::TSequenceLandmarks::const_iterator | const_iterator |
Public Member Functions | |
| TCustomSequenceLandmarks () | |
| Default constructor. More... | |
| iterator | begin () |
| iterator | end () |
| void | clear () |
| size_t | size () const |
| const_iterator | begin () const |
| const_iterator | end () const |
| void | push_back (const CLandmark &lm) |
| The object is copied, thus the original copy passed as a parameter can be released. More... | |
| CLandmark * | get (unsigned int indx) |
| const CLandmark * | get (unsigned int indx) const |
| void | isToBeModified (unsigned int indx) |
| void | hasBeenModified (unsigned int indx) |
| void | hasBeenModifiedAll () |
| void | erase (unsigned int indx) |
| mrpt::utils::CDynamicGrid< vector_int > * | getGrid () |
| const CLandmark * | getByID (CLandmark::TLandmarkID ID) const |
| Returns the landmark with a given landmrk ID, or nullptr if not found. More... | |
| const CLandmark * | getByBeaconID (unsigned int ID) const |
| Returns the landmark with a given beacon ID, or nullptr if not found. More... | |
| float | getLargestDistanceFromOrigin () const |
| This method returns the largest distance from the origin to any of the points, such as a sphere centered at the origin with this radius cover ALL the points in the map (the results are buffered, such as, if the map is not modified, the second call will be much faster than the first one). More... | |
Private Attributes | |
| internal::TSequenceLandmarks | m_landmarks |
| The actual list. More... | |
| mrpt::utils::CDynamicGrid< vector_int > | m_grid |
| A grid-map with the set of landmarks falling into each cell. More... | |
| float | m_largestDistanceFromOrigin |
| Auxiliary variables used in "getLargestDistanceFromOrigin". More... | |
| bool | m_largestDistanceFromOriginIsUpdated |
| Auxiliary variables used in "getLargestDistanceFromOrigin". More... | |
Member Typedef Documentation
◆ const_iterator
| typedef internal::TSequenceLandmarks::const_iterator mrpt::maps::CLandmarksMap::TCustomSequenceLandmarks::const_iterator |
Definition at line 165 of file CLandmarksMap.h.
◆ iterator
| typedef internal::TSequenceLandmarks::iterator mrpt::maps::CLandmarksMap::TCustomSequenceLandmarks::iterator |
Definition at line 161 of file CLandmarksMap.h.
Constructor & Destructor Documentation
◆ TCustomSequenceLandmarks()
| CLandmarksMap::TCustomSequenceLandmarks::TCustomSequenceLandmarks | ( | ) |
Default constructor.
Definition at line 1872 of file CLandmarksMap.cpp.
Member Function Documentation
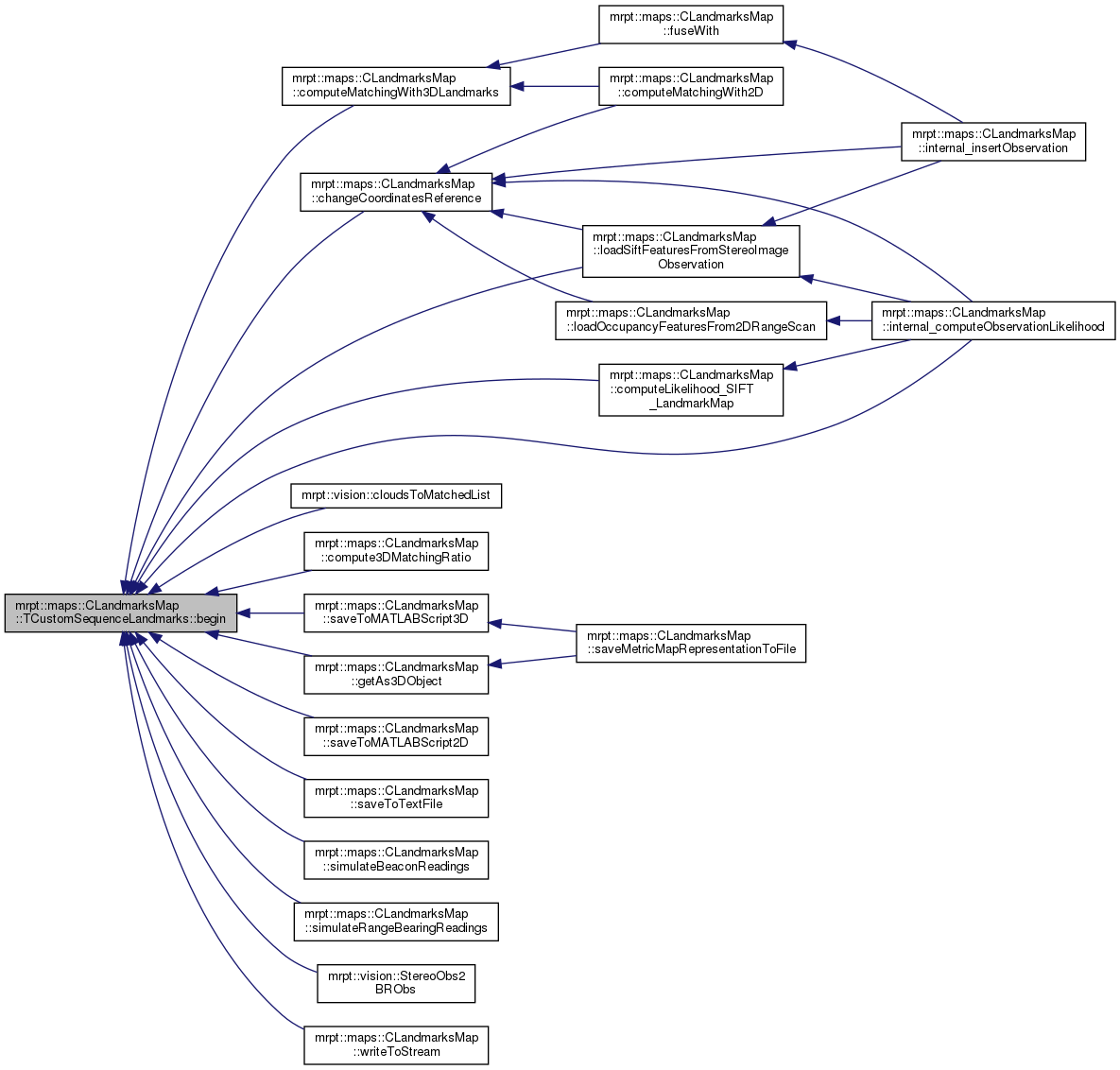
◆ begin() [1/2]
|
inline |
Definition at line 162 of file CLandmarksMap.h.
References m_landmarks.
Referenced by mrpt::maps::CLandmarksMap::changeCoordinatesReference(), mrpt::vision::cloudsToMatchedList(), mrpt::maps::CLandmarksMap::compute3DMatchingRatio(), mrpt::maps::CLandmarksMap::computeLikelihood_SIFT_LandmarkMap(), mrpt::maps::CLandmarksMap::computeMatchingWith3DLandmarks(), mrpt::maps::CLandmarksMap::getAs3DObject(), mrpt::maps::CLandmarksMap::internal_computeObservationLikelihood(), mrpt::maps::CLandmarksMap::loadSiftFeaturesFromStereoImageObservation(), mrpt::maps::CLandmarksMap::saveToMATLABScript2D(), mrpt::maps::CLandmarksMap::saveToMATLABScript3D(), mrpt::maps::CLandmarksMap::saveToTextFile(), mrpt::maps::CLandmarksMap::simulateBeaconReadings(), mrpt::maps::CLandmarksMap::simulateRangeBearingReadings(), mrpt::vision::StereoObs2BRObs(), and mrpt::maps::CLandmarksMap::writeToStream().
◆ begin() [2/2]
|
inline |
Definition at line 167 of file CLandmarksMap.h.
References m_landmarks.
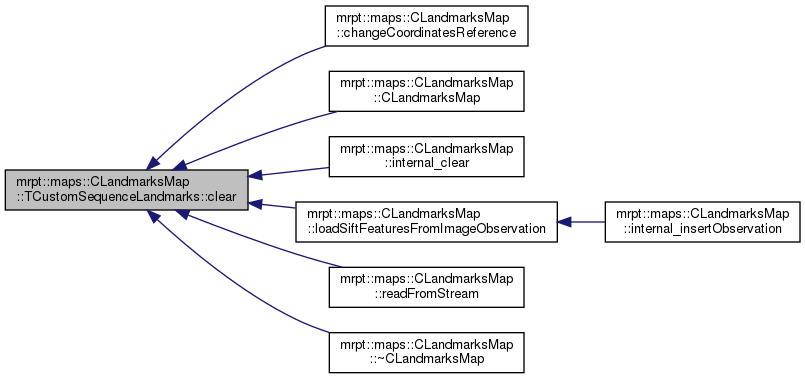
◆ clear()
| void CLandmarksMap::TCustomSequenceLandmarks::clear | ( | ) |
Definition at line 1880 of file CLandmarksMap.cpp.
Referenced by mrpt::maps::CLandmarksMap::changeCoordinatesReference(), mrpt::maps::CLandmarksMap::CLandmarksMap(), mrpt::maps::CLandmarksMap::internal_clear(), mrpt::maps::CLandmarksMap::loadSiftFeaturesFromImageObservation(), mrpt::maps::CLandmarksMap::readFromStream(), and mrpt::maps::CLandmarksMap::~CLandmarksMap().
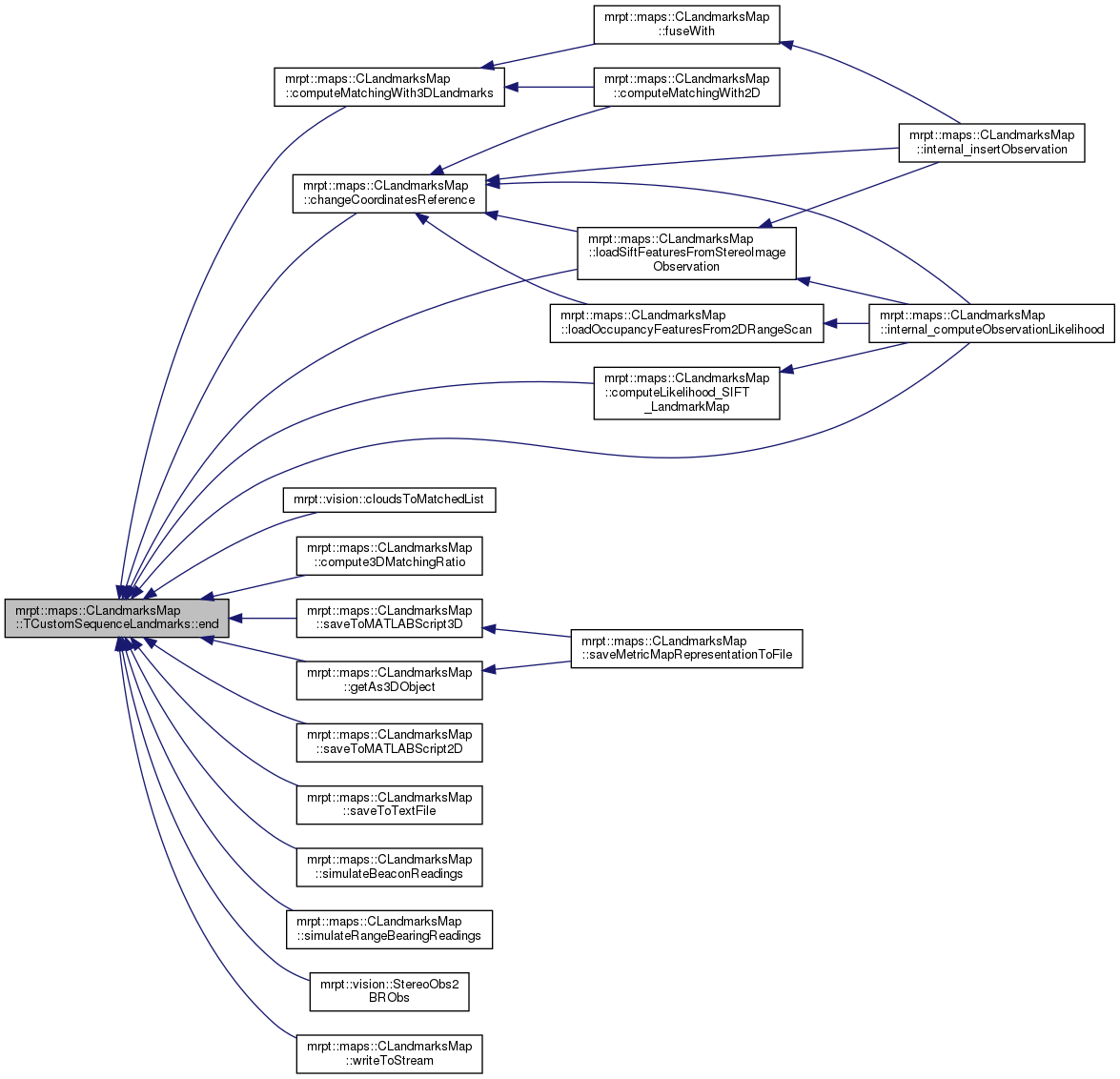
◆ end() [1/2]
|
inline |
Definition at line 163 of file CLandmarksMap.h.
References m_landmarks.
Referenced by mrpt::maps::CLandmarksMap::changeCoordinatesReference(), mrpt::vision::cloudsToMatchedList(), mrpt::maps::CLandmarksMap::compute3DMatchingRatio(), mrpt::maps::CLandmarksMap::computeLikelihood_SIFT_LandmarkMap(), mrpt::maps::CLandmarksMap::computeMatchingWith3DLandmarks(), mrpt::maps::CLandmarksMap::getAs3DObject(), mrpt::maps::CLandmarksMap::internal_computeObservationLikelihood(), mrpt::maps::CLandmarksMap::loadSiftFeaturesFromStereoImageObservation(), mrpt::maps::CLandmarksMap::saveToMATLABScript2D(), mrpt::maps::CLandmarksMap::saveToMATLABScript3D(), mrpt::maps::CLandmarksMap::saveToTextFile(), mrpt::maps::CLandmarksMap::simulateBeaconReadings(), mrpt::maps::CLandmarksMap::simulateRangeBearingReadings(), mrpt::vision::StereoObs2BRObs(), and mrpt::maps::CLandmarksMap::writeToStream().
◆ end() [2/2]
|
inline |
Definition at line 168 of file CLandmarksMap.h.
References m_landmarks.
◆ erase()
| void CLandmarksMap::TCustomSequenceLandmarks::erase | ( | unsigned int | indx | ) |
Definition at line 1940 of file CLandmarksMap.cpp.
Referenced by mrpt::maps::CLandmarksMap::fuseWith().

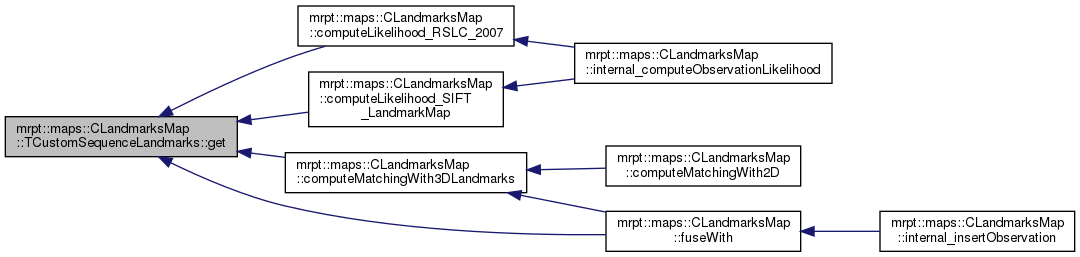
◆ get() [1/2]
| CLandmark * CLandmarksMap::TCustomSequenceLandmarks::get | ( | unsigned int | indx | ) |
Definition at line 1911 of file CLandmarksMap.cpp.
Referenced by mrpt::maps::CLandmarksMap::computeLikelihood_RSLC_2007(), mrpt::maps::CLandmarksMap::computeLikelihood_SIFT_LandmarkMap(), mrpt::maps::CLandmarksMap::computeMatchingWith3DLandmarks(), and mrpt::maps::CLandmarksMap::fuseWith().
◆ get() [2/2]
| const CLandmark * CLandmarksMap::TCustomSequenceLandmarks::get | ( | unsigned int | indx | ) | const |
Definition at line 1916 of file CLandmarksMap.cpp.
◆ getByBeaconID()
| const CLandmark * CLandmarksMap::TCustomSequenceLandmarks::getByBeaconID | ( | unsigned int | ID | ) | const |
Returns the landmark with a given beacon ID, or nullptr if not found.
Definition at line 2717 of file CLandmarksMap.cpp.
Referenced by mrpt::slam::CRejectionSamplingRangeOnlyLocalization::setParams().

◆ getByID()
| const CLandmark * CLandmarksMap::TCustomSequenceLandmarks::getByID | ( | CLandmark::TLandmarkID | ID | ) | const |
Returns the landmark with a given landmrk ID, or nullptr if not found.
Definition at line 2696 of file CLandmarksMap.cpp.
◆ getGrid()
|
inline |
Definition at line 180 of file CLandmarksMap.h.
References m_grid.
Referenced by mrpt::maps::CLandmarksMap::computeLikelihood_RSLC_2007().

◆ getLargestDistanceFromOrigin()
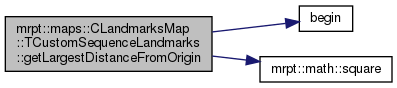
| float CLandmarksMap::TCustomSequenceLandmarks::getLargestDistanceFromOrigin | ( | ) | const |
This method returns the largest distance from the origin to any of the points, such as a sphere centered at the origin with this radius cover ALL the points in the map (the results are buffered, such as, if the map is not modified, the second call will be much faster than the first one).
Definition at line 2003 of file CLandmarksMap.cpp.
References begin(), and mrpt::math::square().
Referenced by mrpt::maps::CLandmarksMap::compute3DMatchingRatio().

◆ hasBeenModified()
| void CLandmarksMap::TCustomSequenceLandmarks::hasBeenModified | ( | unsigned int | indx | ) |
Definition at line 1946 of file CLandmarksMap.cpp.
References min.
Referenced by mrpt::maps::CLandmarksMap::fuseWith().

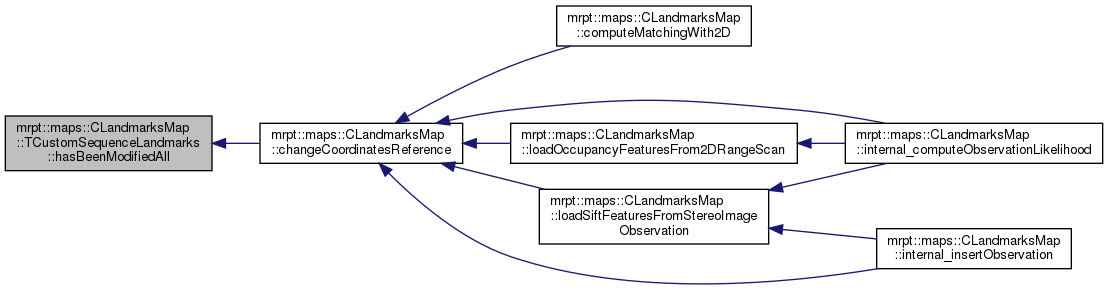
◆ hasBeenModifiedAll()
| void CLandmarksMap::TCustomSequenceLandmarks::hasBeenModifiedAll | ( | ) |
Definition at line 1964 of file CLandmarksMap.cpp.
References min, MRPT_END, and MRPT_START.
Referenced by mrpt::maps::CLandmarksMap::changeCoordinatesReference().
◆ isToBeModified()
| void CLandmarksMap::TCustomSequenceLandmarks::isToBeModified | ( | unsigned int | indx | ) |
Definition at line 1922 of file CLandmarksMap.cpp.
Referenced by mrpt::maps::CLandmarksMap::fuseWith().

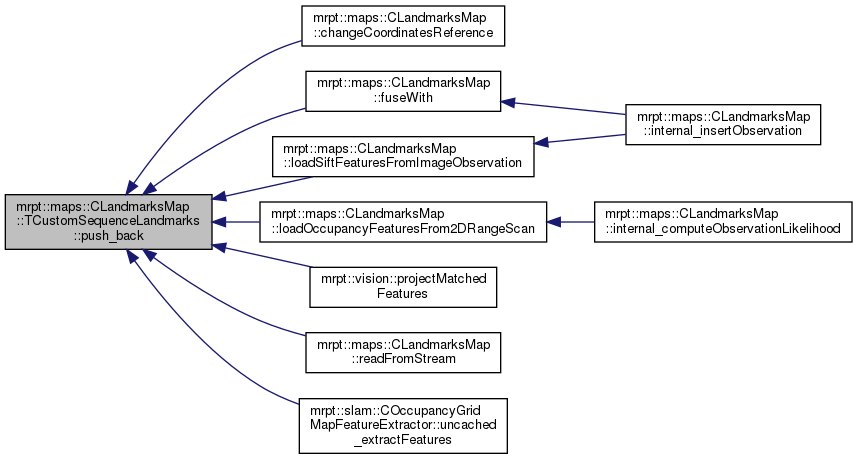
◆ push_back()
The object is copied, thus the original copy passed as a parameter can be released.
Definition at line 1890 of file CLandmarksMap.cpp.
References ASSERT_, min, mrpt::maps::CLandmark::pose_mean, mrpt::math::TPoint3D::x, and mrpt::math::TPoint3D::y.
Referenced by mrpt::maps::CLandmarksMap::changeCoordinatesReference(), mrpt::maps::CLandmarksMap::fuseWith(), mrpt::maps::CLandmarksMap::loadOccupancyFeaturesFrom2DRangeScan(), mrpt::maps::CLandmarksMap::loadSiftFeaturesFromImageObservation(), mrpt::vision::projectMatchedFeatures(), mrpt::maps::CLandmarksMap::readFromStream(), and mrpt::slam::COccupancyGridMapFeatureExtractor::uncached_extractFeatures().
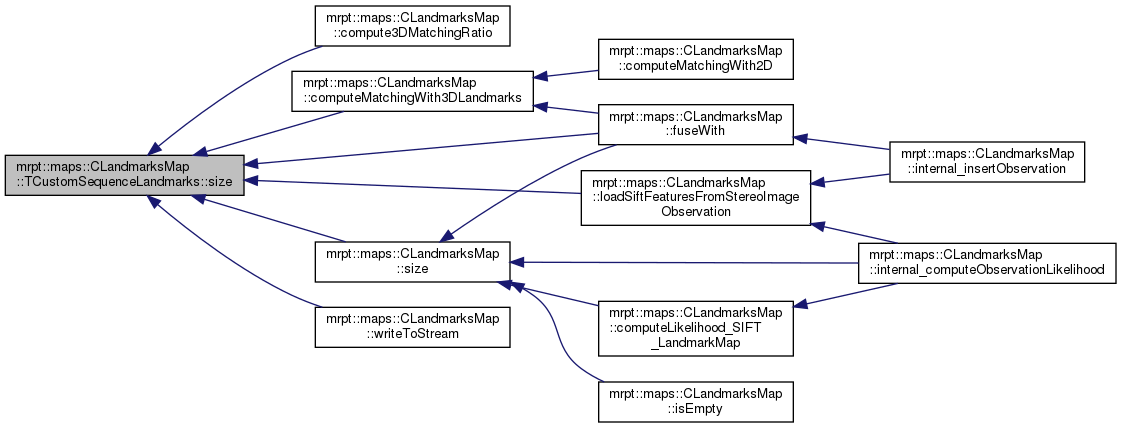
◆ size()
|
inline |
Definition at line 165 of file CLandmarksMap.h.
References m_landmarks.
Referenced by mrpt::maps::CLandmarksMap::compute3DMatchingRatio(), mrpt::maps::CLandmarksMap::computeMatchingWith3DLandmarks(), mrpt::maps::CLandmarksMap::fuseWith(), mrpt::maps::CLandmarksMap::loadSiftFeaturesFromStereoImageObservation(), mrpt::maps::CLandmarksMap::size(), and mrpt::maps::CLandmarksMap::writeToStream().
Member Data Documentation
◆ m_grid
|
private |
A grid-map with the set of landmarks falling into each cell.
- Todo:
- Use the KD-tree instead?
Definition at line 144 of file CLandmarksMap.h.
Referenced by getGrid().
◆ m_landmarks
|
private |
The actual list.
Definition at line 139 of file CLandmarksMap.h.
◆ m_largestDistanceFromOrigin
|
mutableprivate |
Auxiliary variables used in "getLargestDistanceFromOrigin".
- See also
- getLargestDistanceFromOrigin
Definition at line 149 of file CLandmarksMap.h.
◆ m_largestDistanceFromOriginIsUpdated
|
mutableprivate |
Auxiliary variables used in "getLargestDistanceFromOrigin".
- See also
- getLargestDistanceFromOrigin
Definition at line 154 of file CLandmarksMap.h.