Functions | |
| template<class MATRIXLIKE > | |
| size_t | size (const MATRIXLIKE &m, const int dim) |
| template<class T > | |
| T | square (const T x) |
| Inline function for the square of a number. More... | |
| template<class T > | |
| T | hypot_fast (const T x, const T y) |
| Faster version of std::hypot(), to use when overflow is not an issue and we prefer fast code. More... | |
Function Documentation
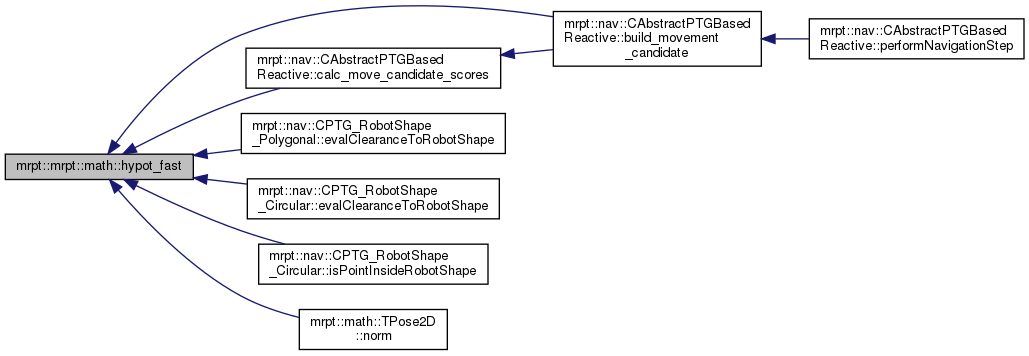
◆ hypot_fast()
|
inline |
Faster version of std::hypot(), to use when overflow is not an issue and we prefer fast code.
Definition at line 63 of file CColouredPointsMap.h.
Referenced by mrpt::nav::CAbstractPTGBasedReactive::build_movement_candidate(), mrpt::nav::CAbstractPTGBasedReactive::calc_move_candidate_scores(), mrpt::nav::CPTG_RobotShape_Polygonal::evalClearanceToRobotShape(), mrpt::nav::CPTG_RobotShape_Circular::evalClearanceToRobotShape(), mrpt::nav::CPTG_RobotShape_Circular::isPointInsideRobotShape(), and mrpt::math::TPose2D::norm().
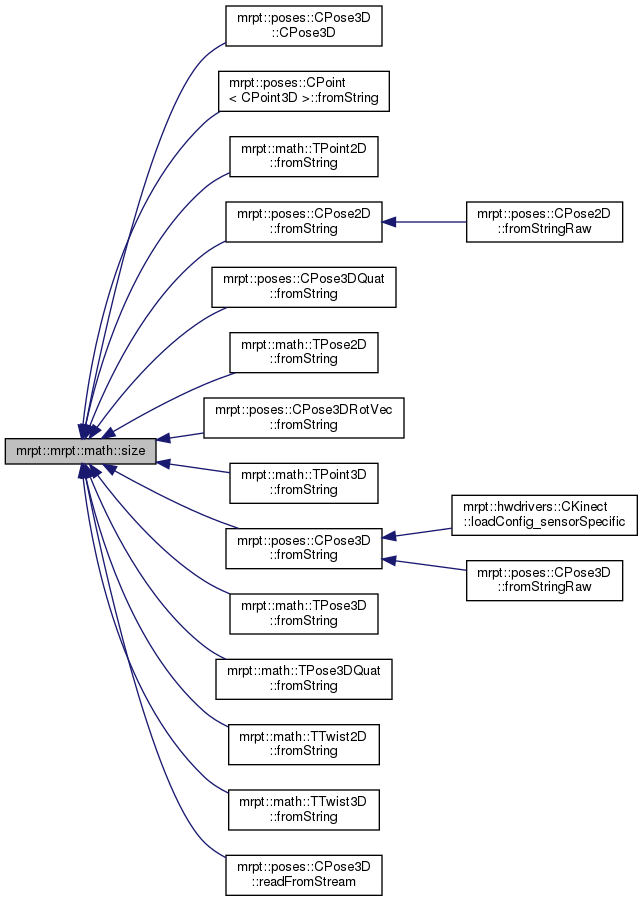
◆ size()
|
inline |
Returns the size of the matrix in the i'th dimension: 1=rows, 2=columns (MATLAB-compatible function)
- Note
- Template argument MATRIXLIKE can be: mrpt::math::CMatrixTemplate, mrpt::math::CMatrixTemplateNumeric, mrpt::math::CMatrixFixedNumeric
Definition at line 41 of file CColouredPointsMap.h.
Referenced by mrpt::poses::CPose3D::CPose3D(), mrpt::poses::CPoint< CPoint3D >::fromString(), mrpt::math::TPoint2D::fromString(), mrpt::poses::CPose2D::fromString(), mrpt::poses::CPose3DQuat::fromString(), mrpt::math::TPose2D::fromString(), mrpt::poses::CPose3DRotVec::fromString(), mrpt::math::TPoint3D::fromString(), mrpt::poses::CPose3D::fromString(), mrpt::math::TPose3D::fromString(), mrpt::math::TPose3DQuat::fromString(), mrpt::math::TTwist2D::fromString(), mrpt::math::TTwist3D::fromString(), and mrpt::poses::CPose3D::readFromStream().
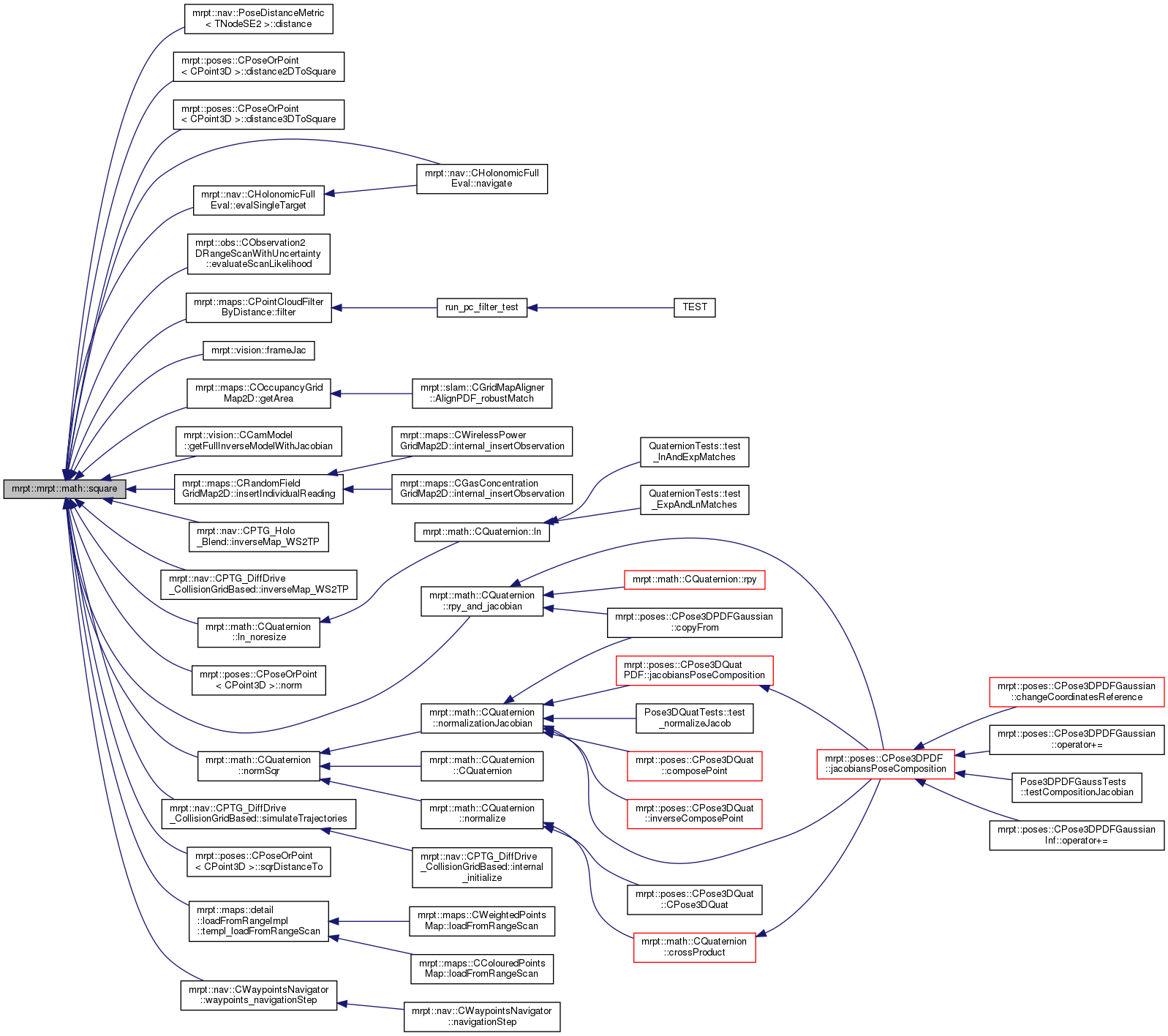
◆ square()
|
inline |
Inline function for the square of a number.
Definition at line 55 of file CColouredPointsMap.h.
Referenced by mrpt::nav::PoseDistanceMetric< TNodeSE2 >::distance(), mrpt::poses::CPoseOrPoint< CPoint3D >::distance2DToSquare(), mrpt::poses::CPoseOrPoint< CPoint3D >::distance3DToSquare(), mrpt::nav::CHolonomicFullEval::evalSingleTarget(), mrpt::obs::CObservation2DRangeScanWithUncertainty::evaluateScanLikelihood(), mrpt::maps::CPointCloudFilterByDistance::filter(), mrpt::vision::frameJac(), mrpt::maps::COccupancyGridMap2D::getArea(), mrpt::vision::CCamModel::getFullInverseModelWithJacobian(), mrpt::maps::CRandomFieldGridMap2D::insertIndividualReading(), mrpt::nav::CPTG_Holo_Blend::inverseMap_WS2TP(), mrpt::nav::CPTG_DiffDrive_CollisionGridBased::inverseMap_WS2TP(), mrpt::math::CQuaternion< T >::ln_noresize(), mrpt::nav::CHolonomicFullEval::navigate(), mrpt::poses::CPoseOrPoint< CPoint3D >::norm(), mrpt::math::CQuaternion< T >::normSqr(), mrpt::math::CQuaternion< T >::rpy_and_jacobian(), mrpt::nav::CPTG_DiffDrive_CollisionGridBased::simulateTrajectories(), mrpt::poses::CPoseOrPoint< CPoint3D >::sqrDistanceTo(), mrpt::maps::detail::loadFromRangeImpl< Derived >::templ_loadFromRangeScan(), and mrpt::nav::CWaypointsNavigator::waypoints_navigationStep().