Detailed Description
A class to interface a Rovio robot (manufactured by WowWee).
Supports: Simple motion commands, video streaming.
#include <mrpt/hwdrivers/CRovio.h>
Classes | |
| struct | TEncoders |
| struct | TOptions |
| struct | TRovioState |
Public Types | |
| enum | status { idle , driving_home , docking , executing_path , recording_path } |
Public Member Functions | |
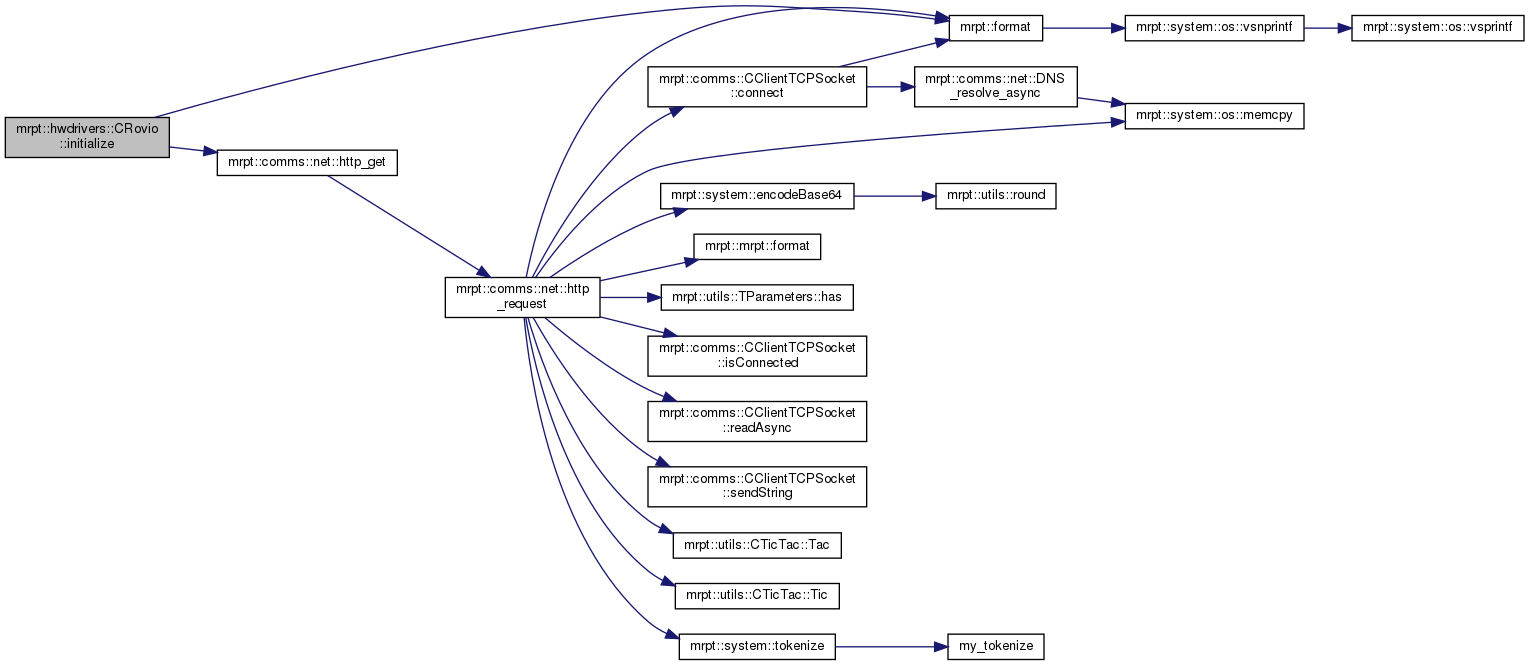
| void | initialize () |
| Establish Connection with Rovio and log in its system: Important, fill out "options" members BEFORE calling this method. More... | |
| bool | move (char direction, int speed=5) |
| move send Rovio the command to move in the specified direcction More... | |
| bool | rotate (char direction, int speed=5) |
| rotate send Rovio the command to rotate in the specified direcction 'r'->right, 'l'->left More... | |
| bool | takeHeadUp () |
| Head positions. More... | |
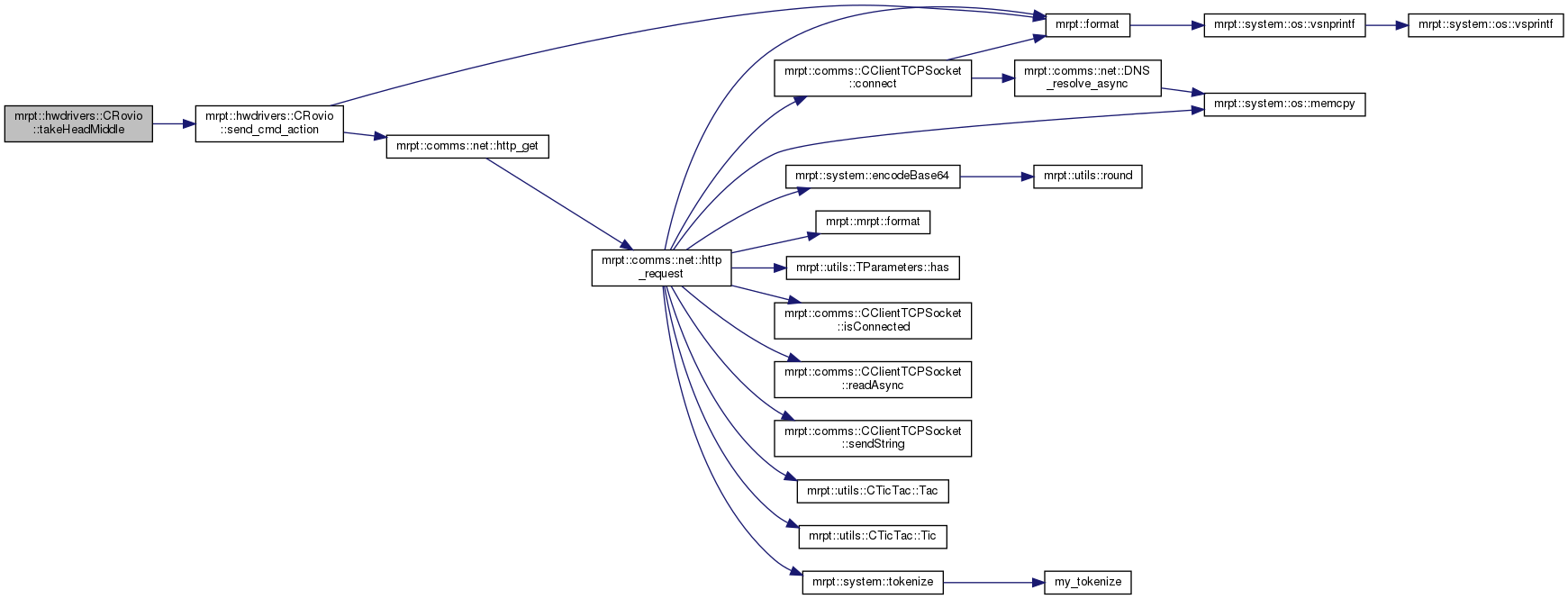
| bool | takeHeadMiddle () |
| bool | takeHeadDown () |
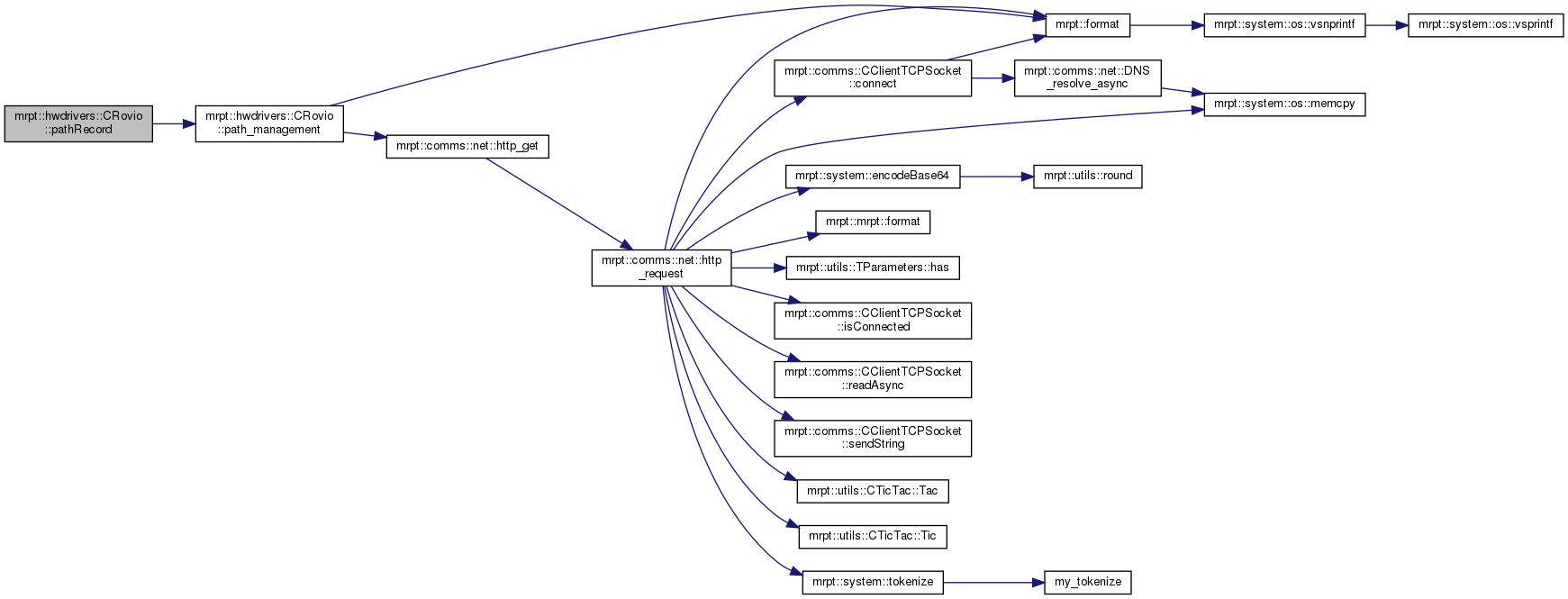
| bool | pathRecord () |
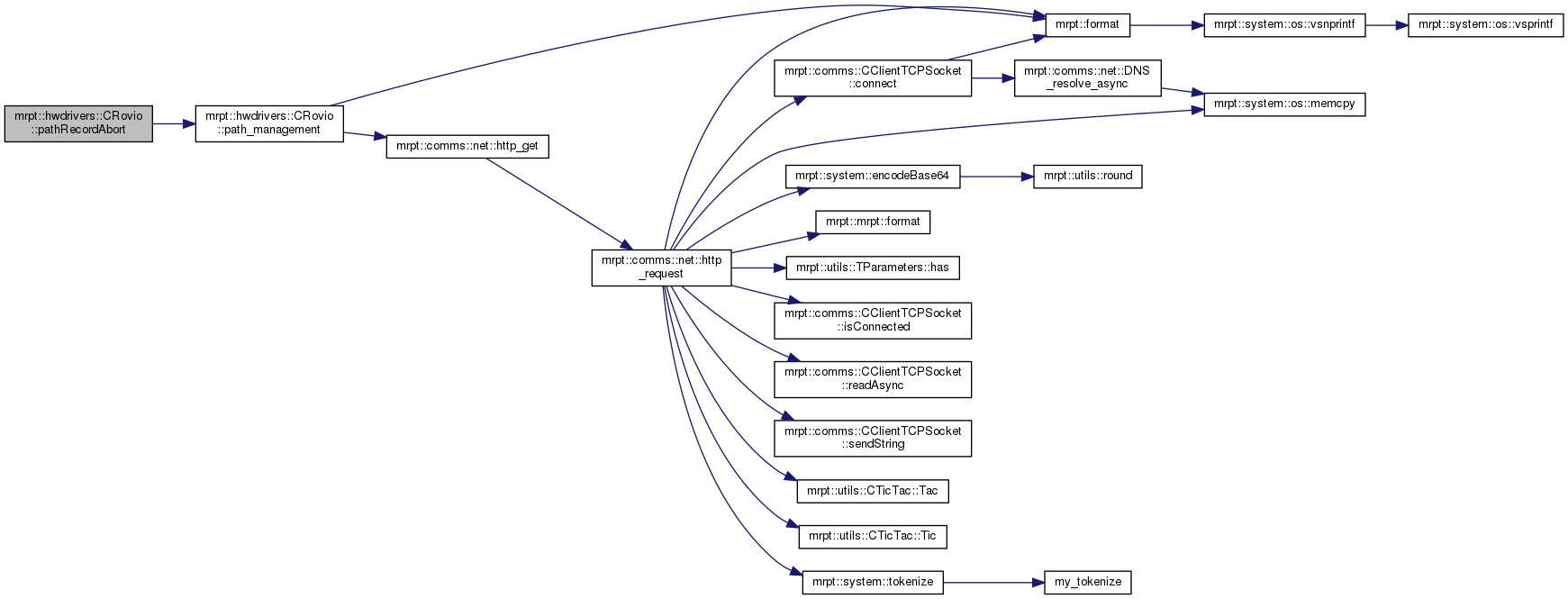
| bool | pathRecordAbort () |
| bool | pathRecordSave (const std::string &path_name) |
| bool | pathDelete (const std::string &path_name) |
| bool | pathGetList (std::string &path_list) |
| Get list of saved paths. More... | |
| bool | pathRunForward () |
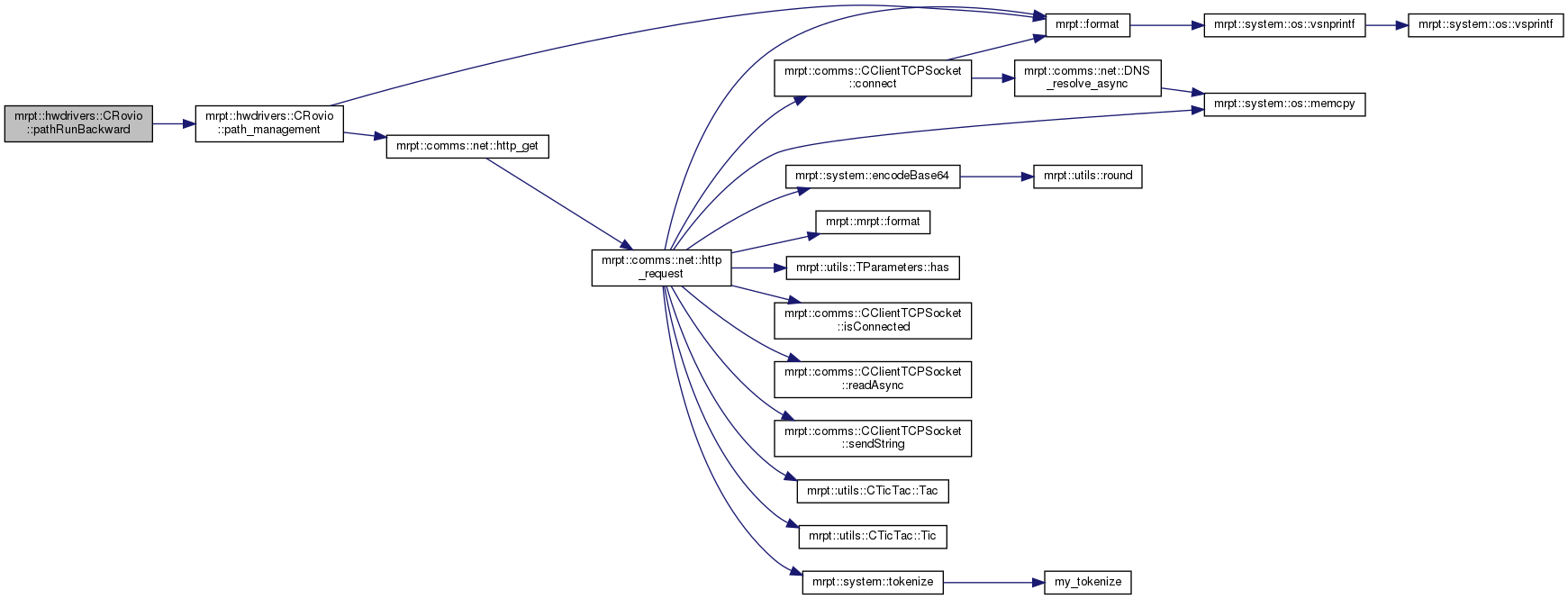
| bool | pathRunBackward () |
| bool | pathRunStop () |
| bool | pathRunPause () |
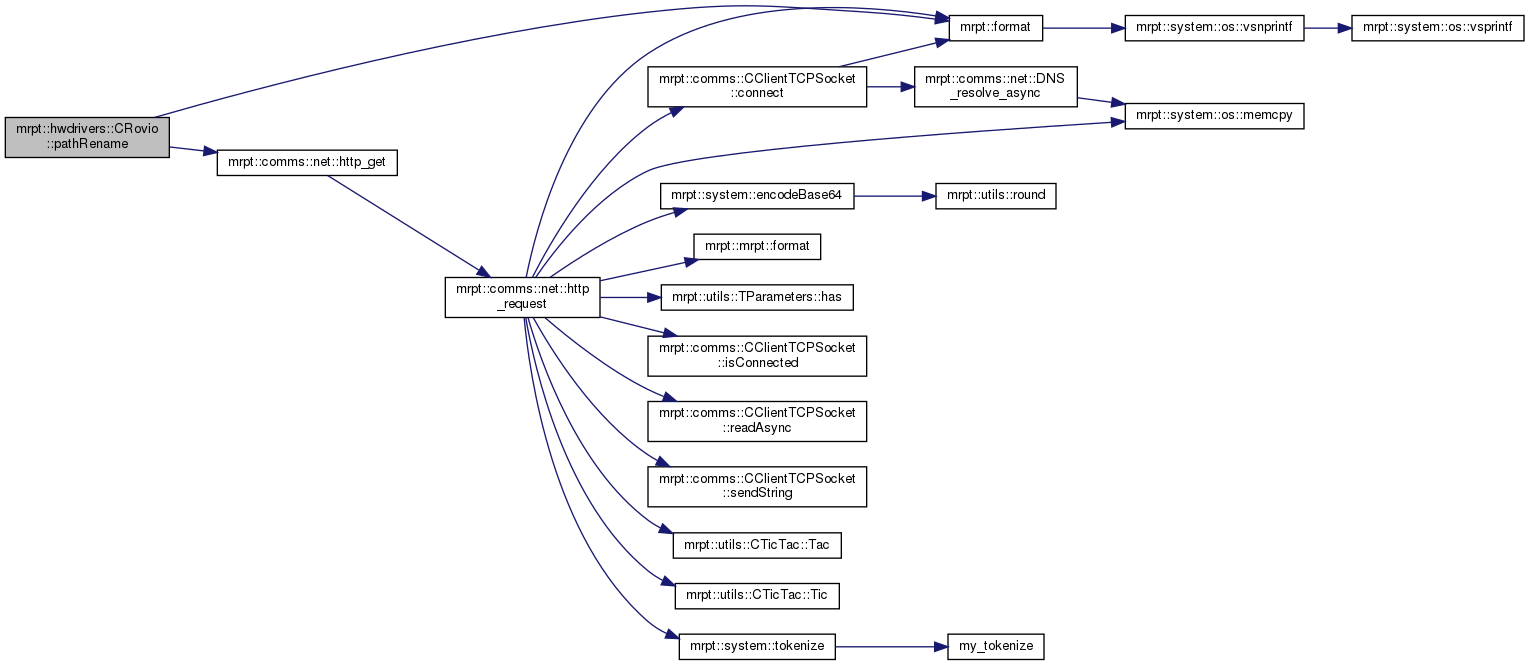
| bool | pathRename (const std::string &old_name, const std::string &new_name) |
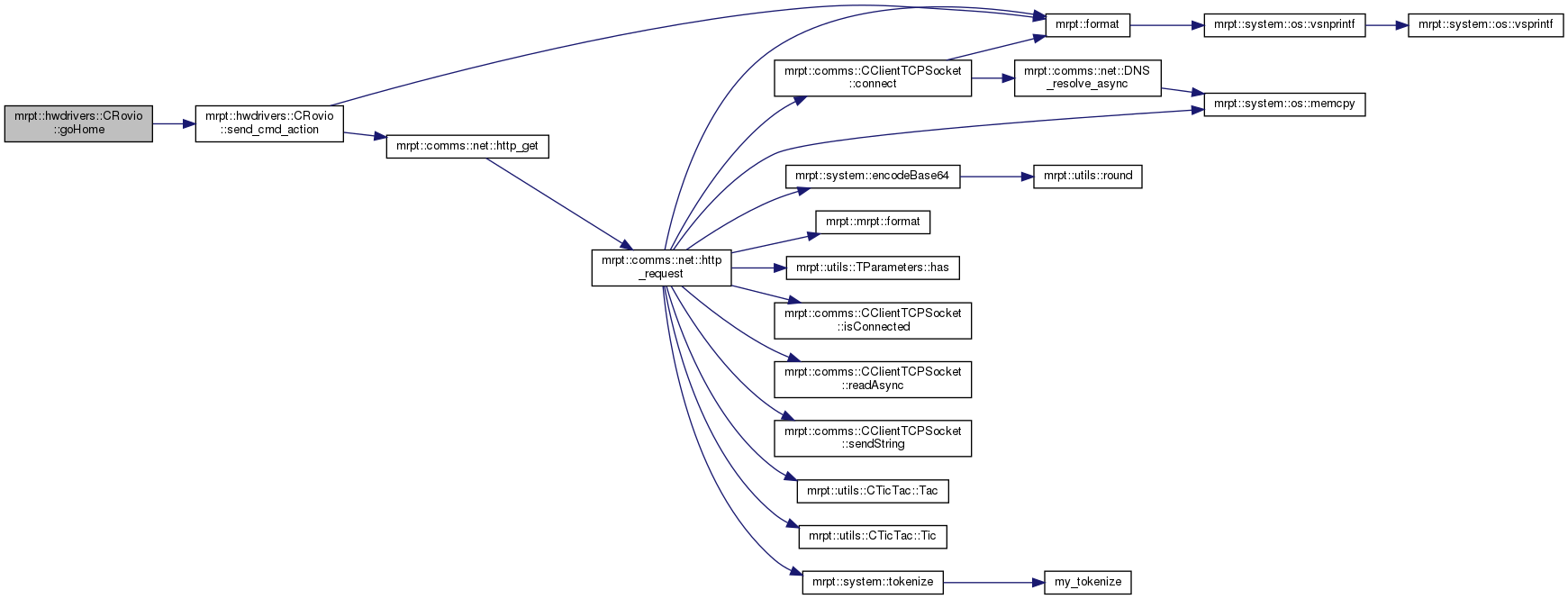
| bool | goHome (bool dock, int speed=5) |
| goHome(bool dock) drives Rovio in front of charging station if the paremeter dock is set to false, otherwise it also docks More... | |
| void | loadConfig (const mrpt::utils::CConfigFileBase &configSource, const std::string §ion) |
| Loads the rovio camera calibration parameters (of leave the default ones if not found) (See CGenericSensor), then call to "loadConfig_sensorSpecific". More... | |
| bool | retrieve_video () |
| This function launchs a thread with the function "thread_video()" which gets frames into a buffer. More... | |
| bool | stop_video () |
| This function stops and joins the thread launched by "retrieve_video()". More... | |
| bool | getNextImageSync (mrpt::obs::CObservationImage::Ptr &lastImage) |
| Returns the next frame from Rovio's live video stream, after starting the live streaming with retrieve_video() More... | |
| bool | captureImageAsync (mrpt::utils::CImage &out_img, bool recttified) |
| Returns a snapshot from Rovio, if rectified is set true, the returned image is rectified with the parameters of intrinsic_matrix and distortion_matrix. More... | |
| bool | isVideoStreamming () const |
| Return true if video is streaming correctly. More... | |
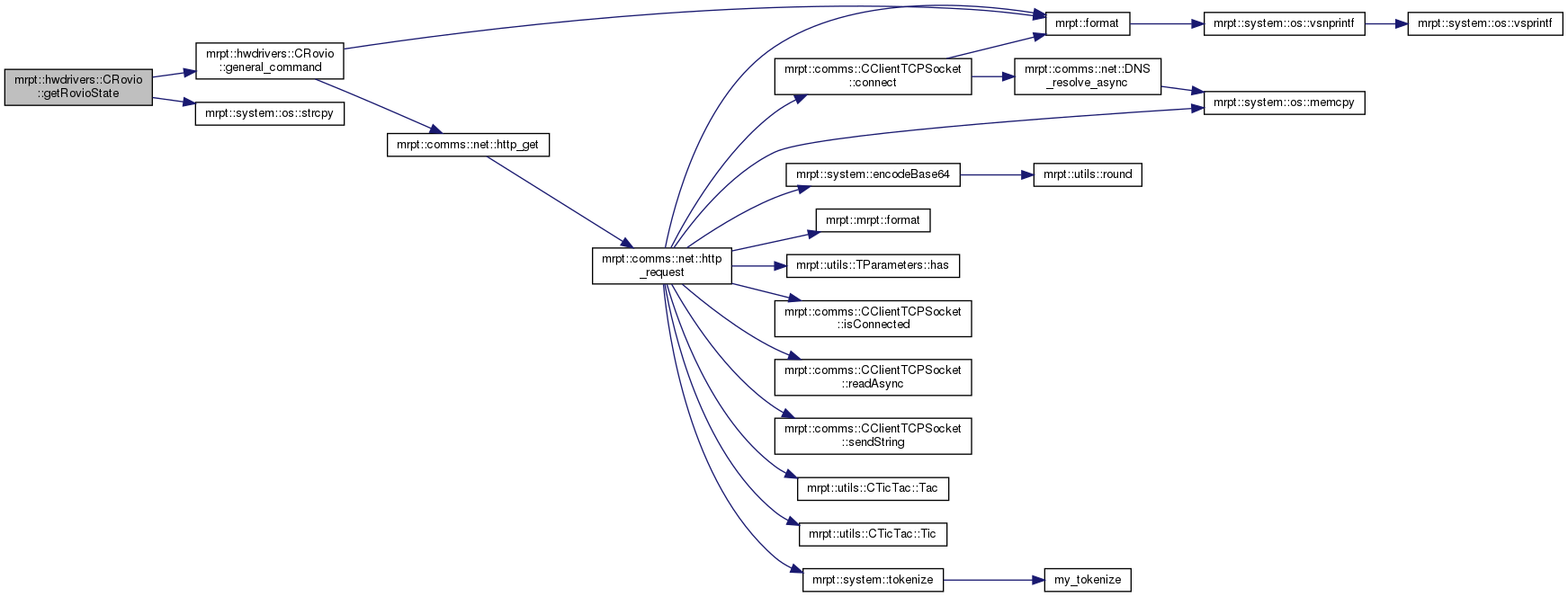
| bool | getRovioState (TRovioState &state) |
| Returns a TRovioState with internal information of Rovio (State, Navigation Signal Strength, Wifi Signal Strength) More... | |
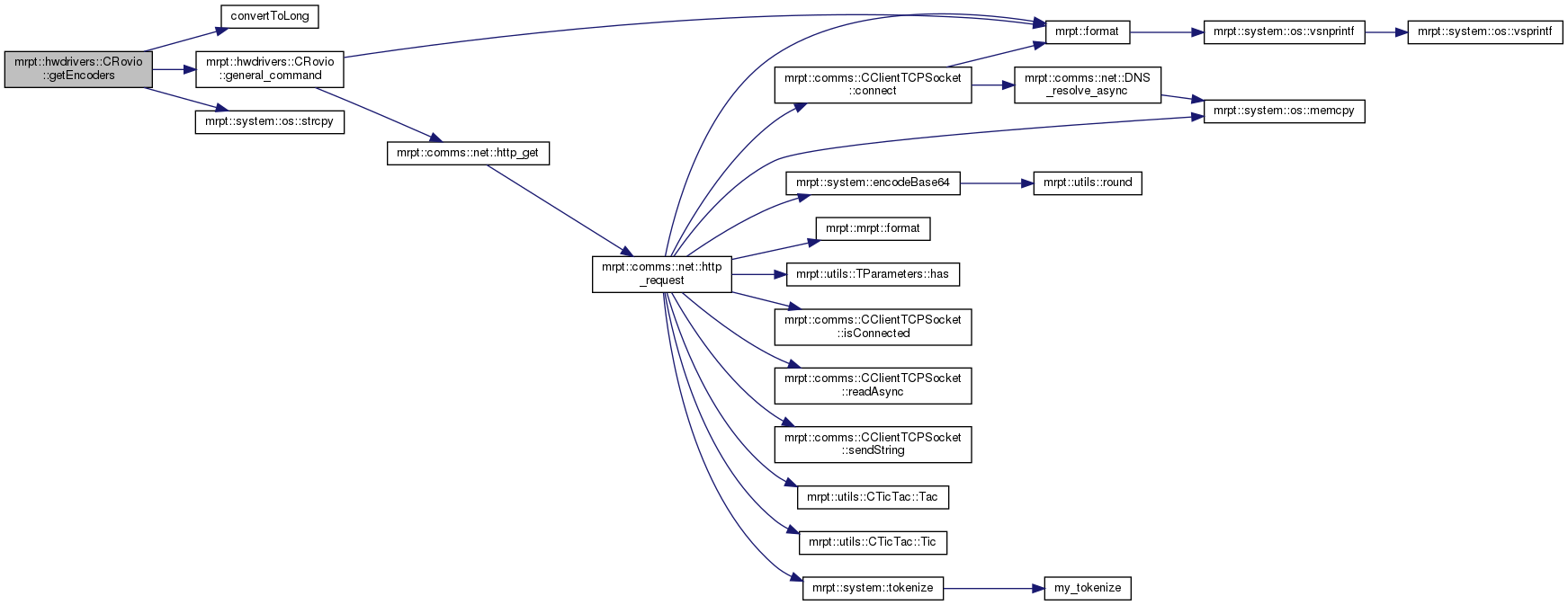
| bool | getEncoders (TEncoders &encoders) |
| Returns a TEncoders with information of Rovio encoders (since last read, it seems Rovio is continuously reading with unknown sample time) More... | |
| bool | getPosition (mrpt::math::TPose2D &out_pose) |
| Returns the Rovio's pose. More... | |
| CRovio () | |
| virtual | ~CRovio () |
Public Attributes | |
| struct mrpt::hwdrivers::CRovio::TOptions | options |
| struct mrpt::hwdrivers::CRovio::TEncoders | encoders |
Private Member Functions | |
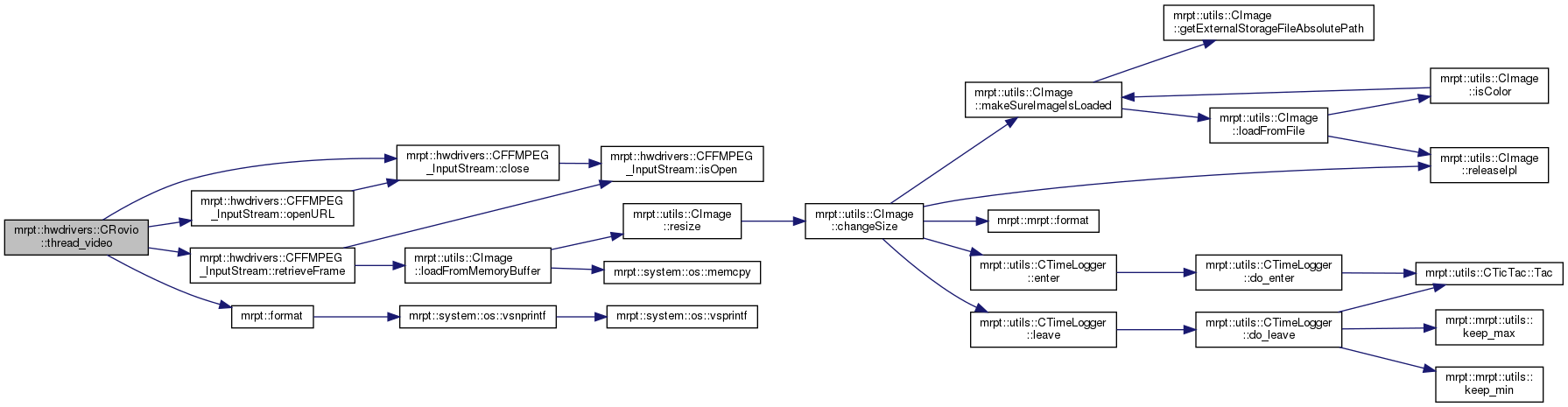
| void | thread_video () |
| This function takes a frame and waits until getLastImage ask for it, and so on. More... | |
| bool | send_cmd_action (int act, int speed) |
| bool | path_management (int act) |
| bool | path_management (int act, const std::string &path_name) |
| bool | general_command (int act, std::string &response, std::string &errormsg) |
Private Attributes | |
| std::thread | m_videoThread |
| bool | m_videothread_must_exit |
| bool | m_videothread_initialized_done |
| bool | m_videothread_initialized_error |
| bool | m_videothread_finished |
| mrpt::obs::CObservationImage::Ptr | buffer_img |
| std::mutex | buffer_img_cs |
Member Enumeration Documentation
◆ status
Constructor & Destructor Documentation
◆ CRovio()
| CRovio::CRovio | ( | ) |
Definition at line 512 of file CRovio.cpp.
◆ ~CRovio()
|
virtual |
Definition at line 513 of file CRovio.cpp.
References isVideoStreamming(), and stop_video().

Member Function Documentation
◆ captureImageAsync()
| bool CRovio::captureImageAsync | ( | mrpt::utils::CImage & | out_img, |
| bool | recttified | ||
| ) |
Returns a snapshot from Rovio, if rectified is set true, the returned image is rectified with the parameters of intrinsic_matrix and distortion_matrix.
This function works asynchronously and does not need to have enabled the live video streaming.
- Returns
- False on error
- See also
- captureImageSync
Definition at line 343 of file CRovio.cpp.
References mrpt::hwdrivers::CRovio::TOptions::cameraParams, mrpt::format(), mrpt::comms::net::http_get(), mrpt::hwdrivers::CRovio::TOptions::IP, mrpt::utils::CImage::loadFromStreamAsJPEG(), options, mrpt::hwdrivers::CRovio::TOptions::password, mrpt::utils::CImage::rectifyImageInPlace(), and mrpt::hwdrivers::CRovio::TOptions::user.

◆ general_command()
|
private |
Definition at line 104 of file CRovio.cpp.
References mrpt::format(), mrpt::comms::net::http_get(), mrpt::hwdrivers::CRovio::TOptions::IP, options, mrpt::hwdrivers::CRovio::TOptions::password, and mrpt::hwdrivers::CRovio::TOptions::user.
Referenced by getEncoders(), getPosition(), getRovioState(), and pathGetList().


◆ getEncoders()
| bool CRovio::getEncoders | ( | CRovio::TEncoders & | encoders | ) |
Returns a TEncoders with information of Rovio encoders (since last read, it seems Rovio is continuously reading with unknown sample time)
- Returns
- False on error
Definition at line 407 of file CRovio.cpp.
References convertToLong(), encoders, mrpt::obs::gnss::error, general_command(), mrpt::hwdrivers::CRovio::TEncoders::left, MRPT_UNUSED_PARAM, and mrpt::system::os::strcpy().
◆ getNextImageSync()
| bool CRovio::getNextImageSync | ( | mrpt::obs::CObservationImage::Ptr & | lastImage | ) |
Returns the next frame from Rovio's live video stream, after starting the live streaming with retrieve_video()
- Returns
- False on error
- See also
- retrieve_video, captureImageAsync
Definition at line 324 of file CRovio.cpp.
References buffer_img, buffer_img_cs, and isVideoStreamming().

◆ getPosition()
| bool CRovio::getPosition | ( | mrpt::math::TPose2D & | out_pose | ) |
Returns the Rovio's pose.
- Returns
- False on error
Definition at line 475 of file CRovio.cpp.
References general_command(), mrpt::math::TPose2D::phi, mrpt::system::os::strcpy(), mrpt::math::TPose2D::x, and mrpt::math::TPose2D::y.

◆ getRovioState()
| bool CRovio::getRovioState | ( | CRovio::TRovioState & | status | ) |
Returns a TRovioState with internal information of Rovio (State, Navigation Signal Strength, Wifi Signal Strength)
- Returns
- False on error
Definition at line 372 of file CRovio.cpp.
References mrpt::obs::gnss::error, general_command(), MRPT_UNUSED_PARAM, mrpt::system::os::strcpy(), and mrpt::math::TPose2D::x.
◆ goHome()
| bool CRovio::goHome | ( | bool | dock, |
| int | speed = 5 |
||
| ) |
goHome(bool dock) drives Rovio in front of charging station if the paremeter dock is set to false, otherwise it also docks
- Returns
- False on error
Definition at line 189 of file CRovio.cpp.
References send_cmd_action().
◆ initialize()
Establish Connection with Rovio and log in its system: Important, fill out "options" members BEFORE calling this method.
- Exceptions
-
std::runtime On errors
Definition at line 49 of file CRovio.cpp.
References mrpt::format(), mrpt::comms::net::http_get(), mrpt::hwdrivers::CRovio::TOptions::IP, options, mrpt::hwdrivers::CRovio::TOptions::password, THROW_EXCEPTION_FMT, and mrpt::hwdrivers::CRovio::TOptions::user.
◆ isVideoStreamming()
| bool CRovio::isVideoStreamming | ( | ) | const |
Return true if video is streaming correctly.
- See also
- retrieve_video
Definition at line 306 of file CRovio.cpp.
References m_videoThread, and m_videothread_finished.
Referenced by getNextImageSync(), stop_video(), and ~CRovio().

◆ loadConfig()
| void CRovio::loadConfig | ( | const mrpt::utils::CConfigFileBase & | configSource, |
| const std::string & | section | ||
| ) |
Loads the rovio camera calibration parameters (of leave the default ones if not found) (See CGenericSensor), then call to "loadConfig_sensorSpecific".
- Exceptions
-
This method throws an exception with a descriptive message if some critical parameter is missing or has an invalid value.
Definition at line 200 of file CRovio.cpp.
References mrpt::hwdrivers::CRovio::TOptions::cameraParams, mrpt::utils::TCamera::loadFromConfigFile(), and options.

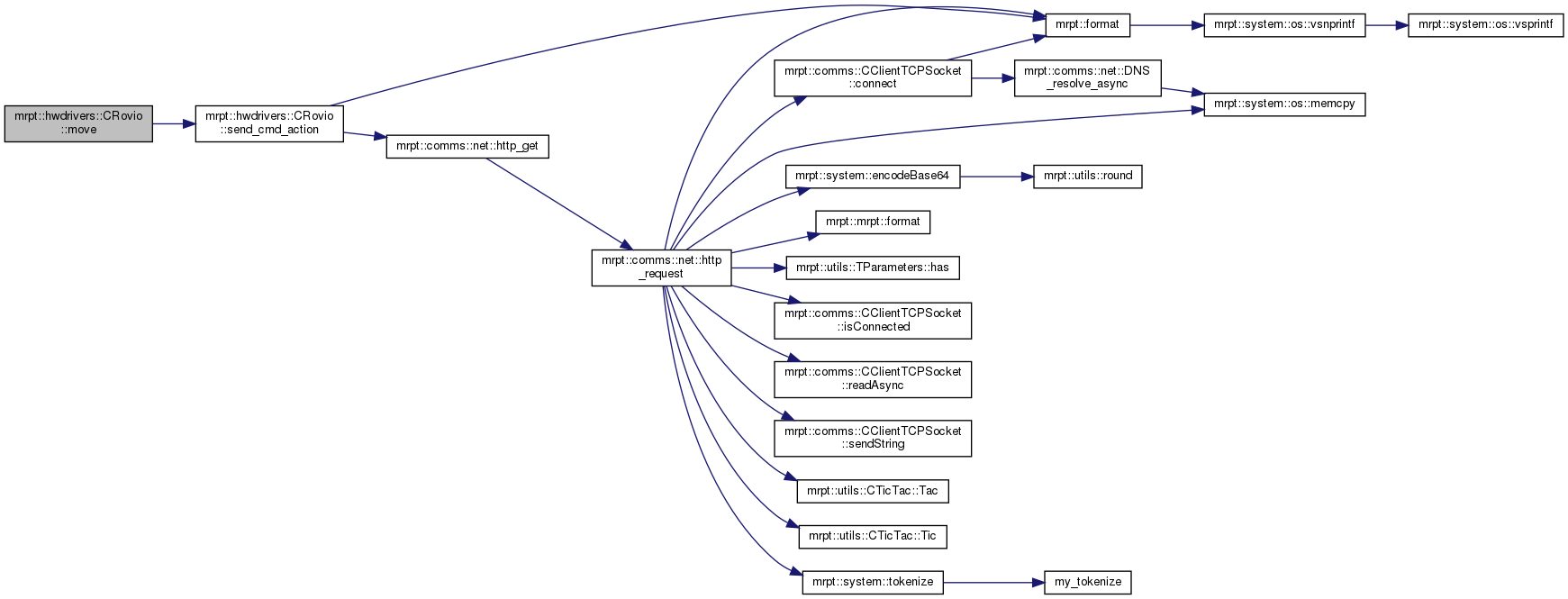
◆ move()
| bool CRovio::move | ( | char | direction, |
| int | speed = 5 |
||
| ) |
move send Rovio the command to move in the specified direcction
- Parameters
-
direction 'f'->forward, 'b'->backward, 'r'->right, 'l'->left
- Returns
- False on error
Definition at line 116 of file CRovio.cpp.
References send_cmd_action().
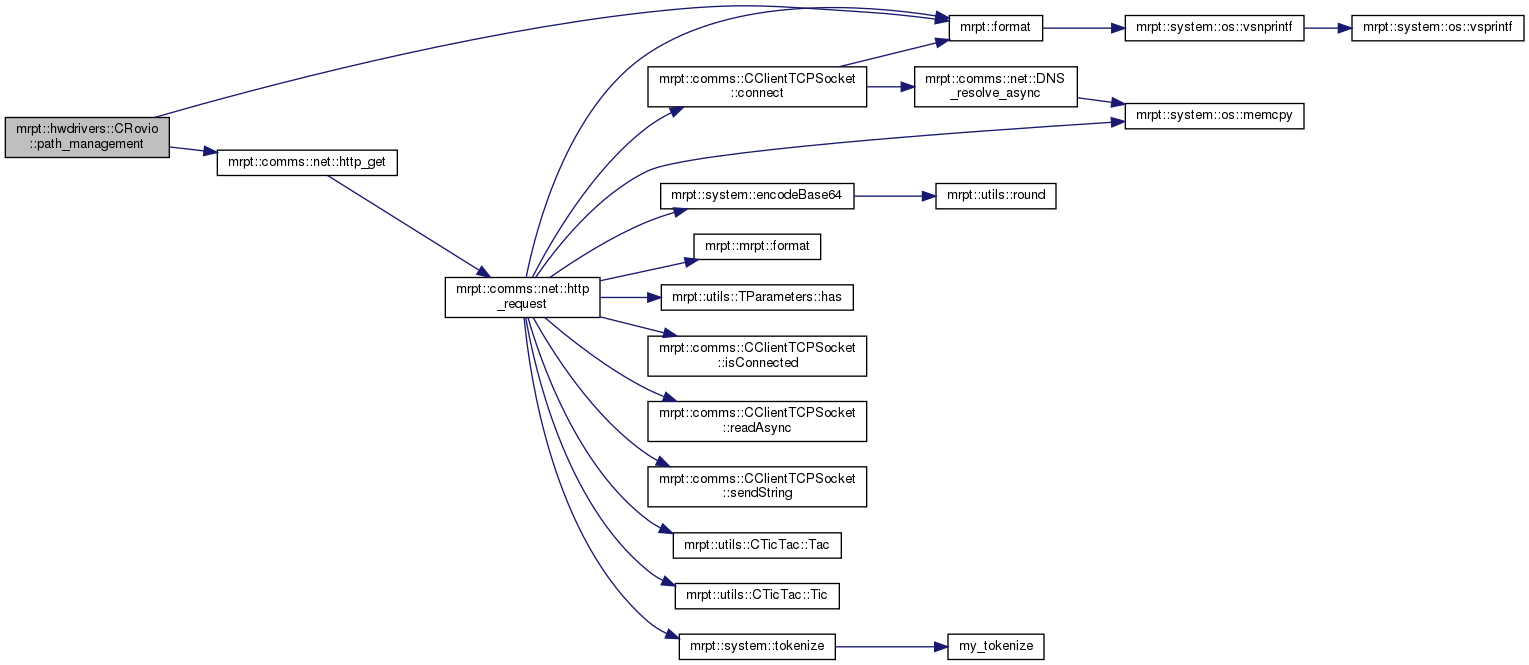
◆ path_management() [1/2]
|
private |
Definition at line 80 of file CRovio.cpp.
References mrpt::format(), mrpt::comms::net::http_get(), mrpt::hwdrivers::CRovio::TOptions::IP, options, mrpt::hwdrivers::CRovio::TOptions::password, and mrpt::hwdrivers::CRovio::TOptions::user.
Referenced by pathDelete(), pathRecord(), pathRecordAbort(), pathRecordSave(), pathRunBackward(), pathRunForward(), pathRunPause(), and pathRunStop().


◆ path_management() [2/2]
|
private |
Definition at line 90 of file CRovio.cpp.
References mrpt::format(), mrpt::comms::net::http_get(), mrpt::hwdrivers::CRovio::TOptions::IP, options, mrpt::hwdrivers::CRovio::TOptions::password, and mrpt::hwdrivers::CRovio::TOptions::user.
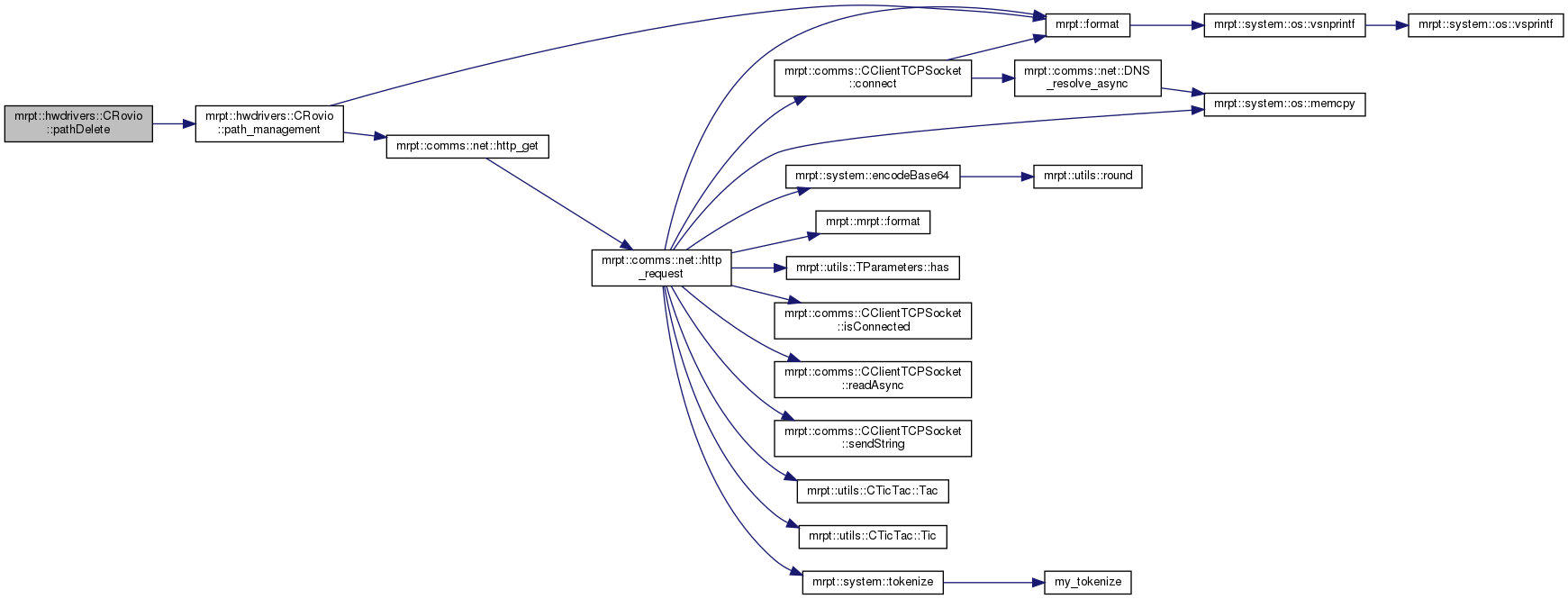
◆ pathDelete()
| bool CRovio::pathDelete | ( | const std::string & | path_name | ) |
Definition at line 162 of file CRovio.cpp.
References path_management().
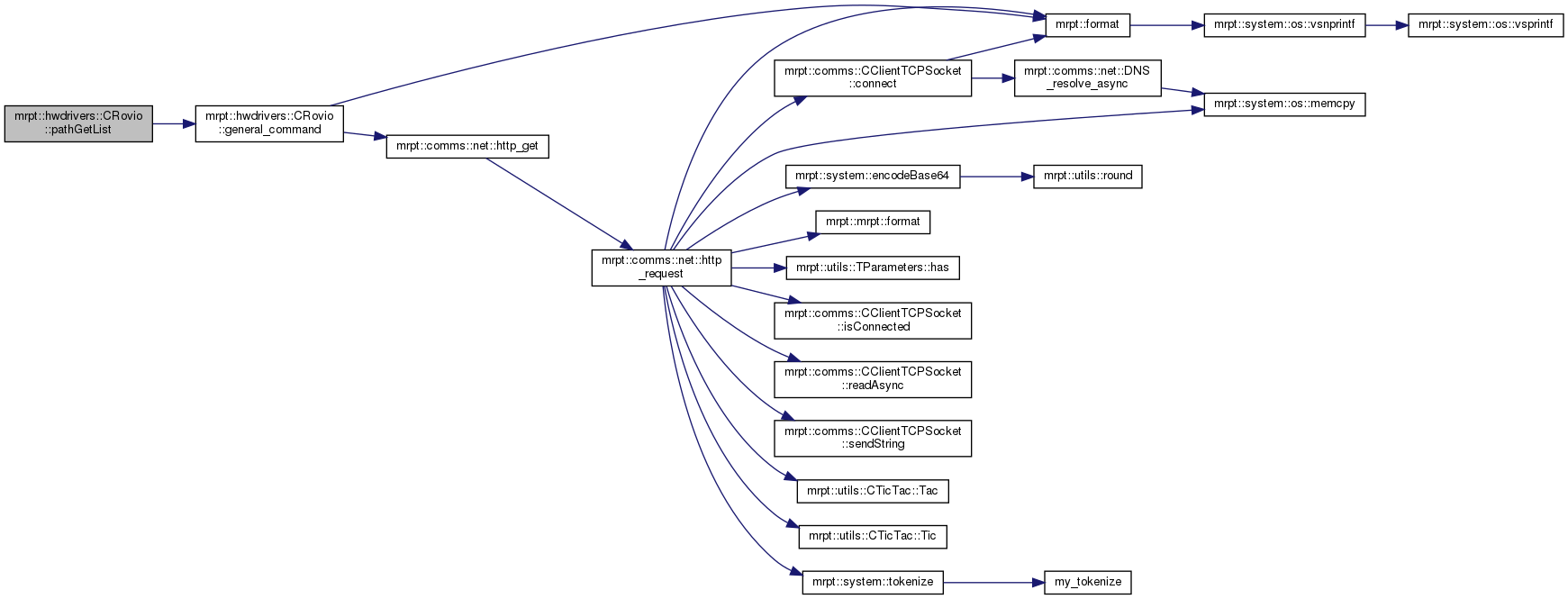
◆ pathGetList()
| bool CRovio::pathGetList | ( | std::string & | path_list | ) |
Get list of saved paths.
Definition at line 166 of file CRovio.cpp.
References mrpt::obs::gnss::error, and general_command().
◆ pathRecord()
| bool CRovio::pathRecord | ( | ) |
Definition at line 156 of file CRovio.cpp.
References path_management().
◆ pathRecordAbort()
| bool CRovio::pathRecordAbort | ( | ) |
Definition at line 157 of file CRovio.cpp.
References path_management().
◆ pathRecordSave()
| bool CRovio::pathRecordSave | ( | const std::string & | path_name | ) |
Definition at line 158 of file CRovio.cpp.
References path_management().

◆ pathRename()
| bool CRovio::pathRename | ( | const std::string & | old_name, |
| const std::string & | new_name | ||
| ) |
Definition at line 176 of file CRovio.cpp.
References mrpt::format(), mrpt::comms::net::http_get(), mrpt::hwdrivers::CRovio::TOptions::IP, options, mrpt::hwdrivers::CRovio::TOptions::password, and mrpt::hwdrivers::CRovio::TOptions::user.
◆ pathRunBackward()
| bool CRovio::pathRunBackward | ( | ) |
Definition at line 173 of file CRovio.cpp.
References path_management().
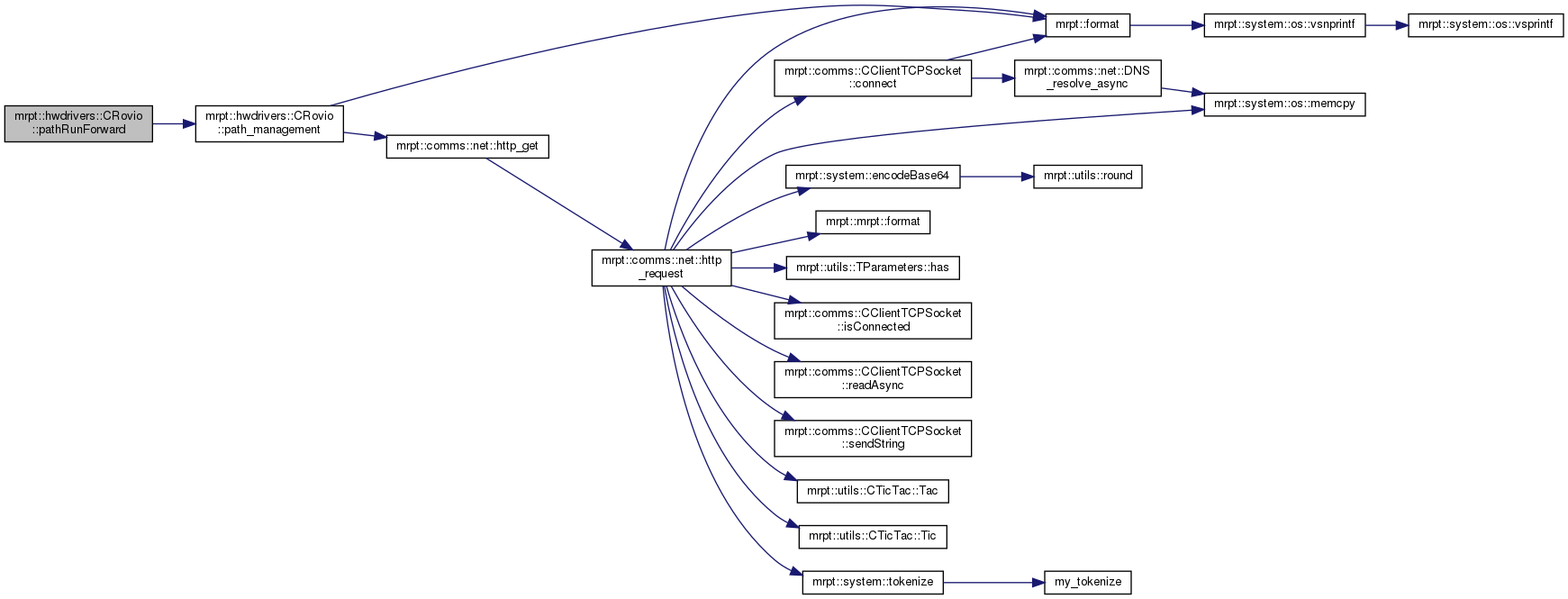
◆ pathRunForward()
| bool CRovio::pathRunForward | ( | ) |
Definition at line 172 of file CRovio.cpp.
References path_management().
◆ pathRunPause()
| bool CRovio::pathRunPause | ( | ) |
Definition at line 175 of file CRovio.cpp.
References path_management().

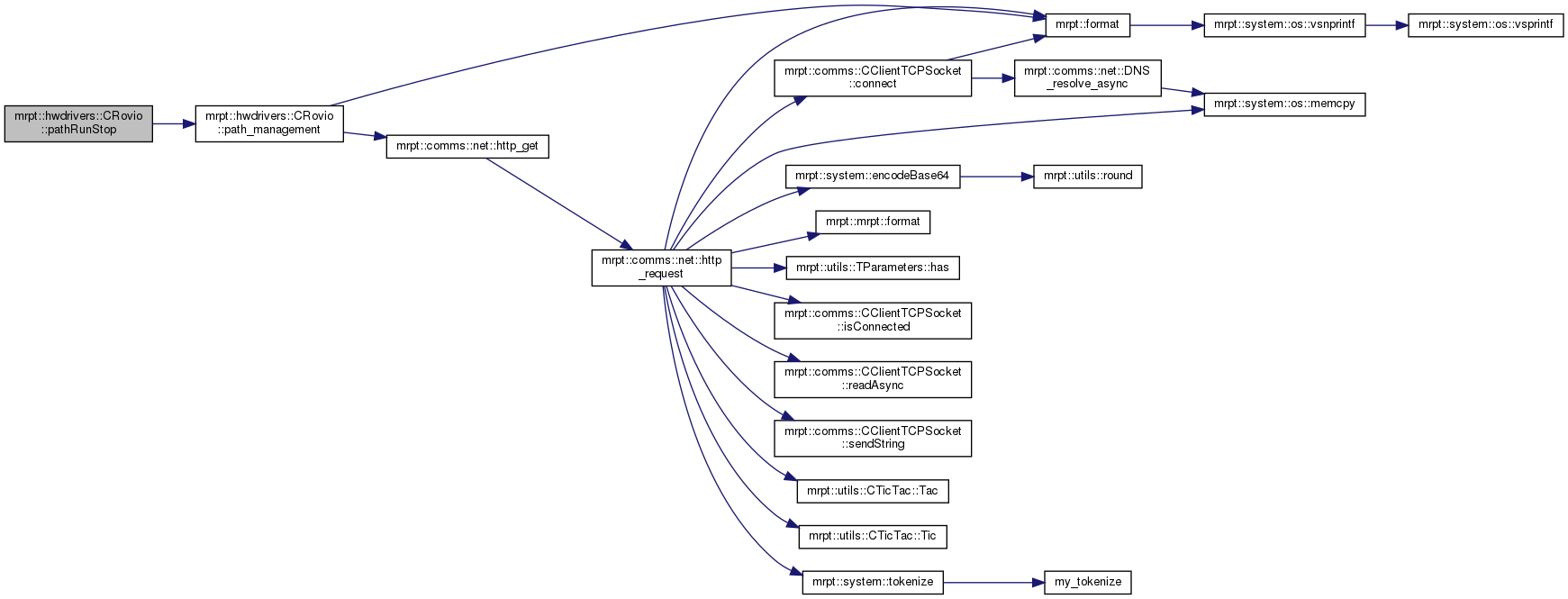
◆ pathRunStop()
| bool CRovio::pathRunStop | ( | ) |
Definition at line 174 of file CRovio.cpp.
References path_management().
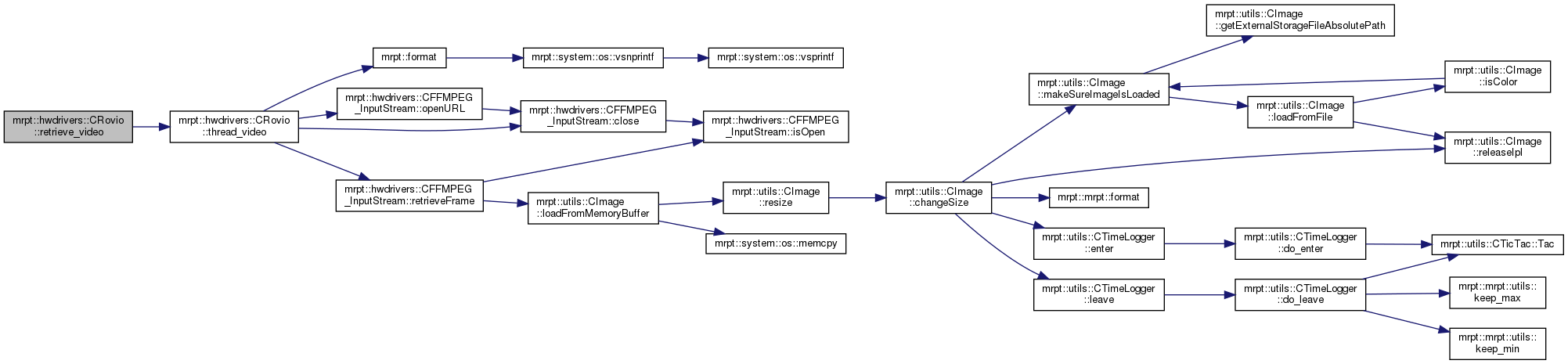
◆ retrieve_video()
| bool CRovio::retrieve_video | ( | ) |
This function launchs a thread with the function "thread_video()" which gets frames into a buffer.
After calling this method, images can be obtained with getNextImageSync()
- Returns
- False on error
- See also
- getNextImageSync
Definition at line 277 of file CRovio.cpp.
References m_videoThread, m_videothread_finished, m_videothread_initialized_done, m_videothread_initialized_error, m_videothread_must_exit, and thread_video().
◆ rotate()
| bool CRovio::rotate | ( | char | direction, |
| int | speed = 5 |
||
| ) |
rotate send Rovio the command to rotate in the specified direcction 'r'->right, 'l'->left
- Returns
- False on error
Definition at line 134 of file CRovio.cpp.
References send_cmd_action().

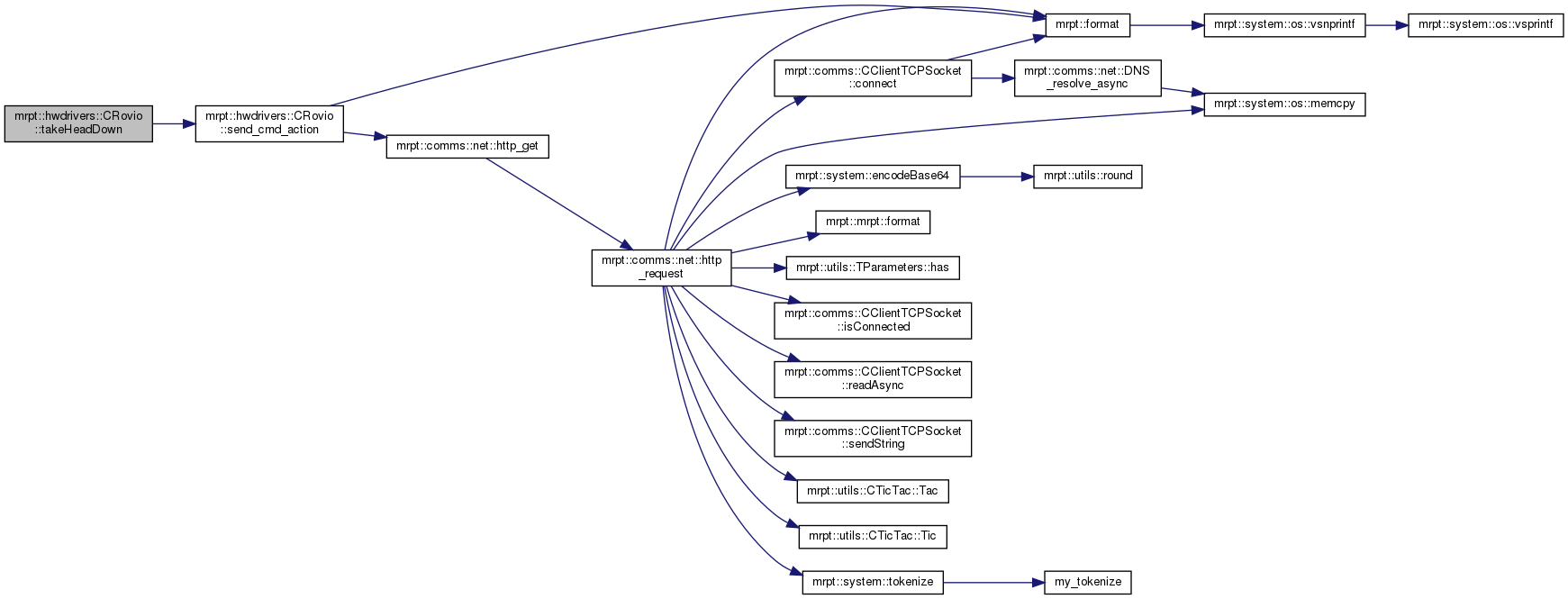
◆ send_cmd_action()
|
private |
Definition at line 67 of file CRovio.cpp.
References mrpt::format(), mrpt::comms::net::http_get(), mrpt::hwdrivers::CRovio::TOptions::IP, options, mrpt::hwdrivers::CRovio::TOptions::password, and mrpt::hwdrivers::CRovio::TOptions::user.
Referenced by goHome(), move(), rotate(), takeHeadDown(), takeHeadMiddle(), and takeHeadUp().


◆ stop_video()
| bool CRovio::stop_video | ( | ) |
This function stops and joins the thread launched by "retrieve_video()".
- Returns
- False on error
Definition at line 311 of file CRovio.cpp.
References isVideoStreamming(), m_videoThread, and m_videothread_must_exit.
Referenced by ~CRovio().


◆ takeHeadDown()
| bool CRovio::takeHeadDown | ( | ) |
Definition at line 152 of file CRovio.cpp.
References send_cmd_action().
◆ takeHeadMiddle()
| bool CRovio::takeHeadMiddle | ( | ) |
Definition at line 151 of file CRovio.cpp.
References send_cmd_action().
◆ takeHeadUp()
| bool CRovio::takeHeadUp | ( | ) |
Head positions.
- Returns
- False on error
Definition at line 150 of file CRovio.cpp.
References send_cmd_action().

◆ thread_video()
|
private |
This function takes a frame and waits until getLastImage ask for it, and so on.
Definition at line 211 of file CRovio.cpp.
References buffer_img, buffer_img_cs, mrpt::hwdrivers::CRovio::TOptions::cameraParams, mrpt::hwdrivers::CFFMPEG_InputStream::close(), mrpt::format(), mrpt::hwdrivers::CRovio::TOptions::IP, m_videothread_finished, m_videothread_initialized_done, m_videothread_initialized_error, m_videothread_must_exit, mrpt::hwdrivers::CFFMPEG_InputStream::openURL(), options, and mrpt::hwdrivers::CFFMPEG_InputStream::retrieveFrame().
Referenced by retrieve_video().

Member Data Documentation
◆ buffer_img
|
private |
Definition at line 37 of file CRovio.h.
Referenced by getNextImageSync(), and thread_video().
◆ buffer_img_cs
|
private |
Definition at line 38 of file CRovio.h.
Referenced by getNextImageSync(), and thread_video().
◆ encoders
| struct mrpt::hwdrivers::CRovio::TEncoders mrpt::hwdrivers::CRovio::encoders |
Referenced by getEncoders().
◆ m_videoThread
|
private |
Definition at line 31 of file CRovio.h.
Referenced by isVideoStreamming(), retrieve_video(), and stop_video().
◆ m_videothread_finished
|
private |
Definition at line 35 of file CRovio.h.
Referenced by isVideoStreamming(), retrieve_video(), and thread_video().
◆ m_videothread_initialized_done
|
private |
Definition at line 33 of file CRovio.h.
Referenced by retrieve_video(), and thread_video().
◆ m_videothread_initialized_error
|
private |
Definition at line 34 of file CRovio.h.
Referenced by retrieve_video(), and thread_video().
◆ m_videothread_must_exit
|
private |
Definition at line 32 of file CRovio.h.
Referenced by retrieve_video(), stop_video(), and thread_video().
◆ options
| struct mrpt::hwdrivers::CRovio::TOptions mrpt::hwdrivers::CRovio::options |
Referenced by captureImageAsync(), general_command(), initialize(), loadConfig(), path_management(), pathRename(), send_cmd_action(), and thread_video().