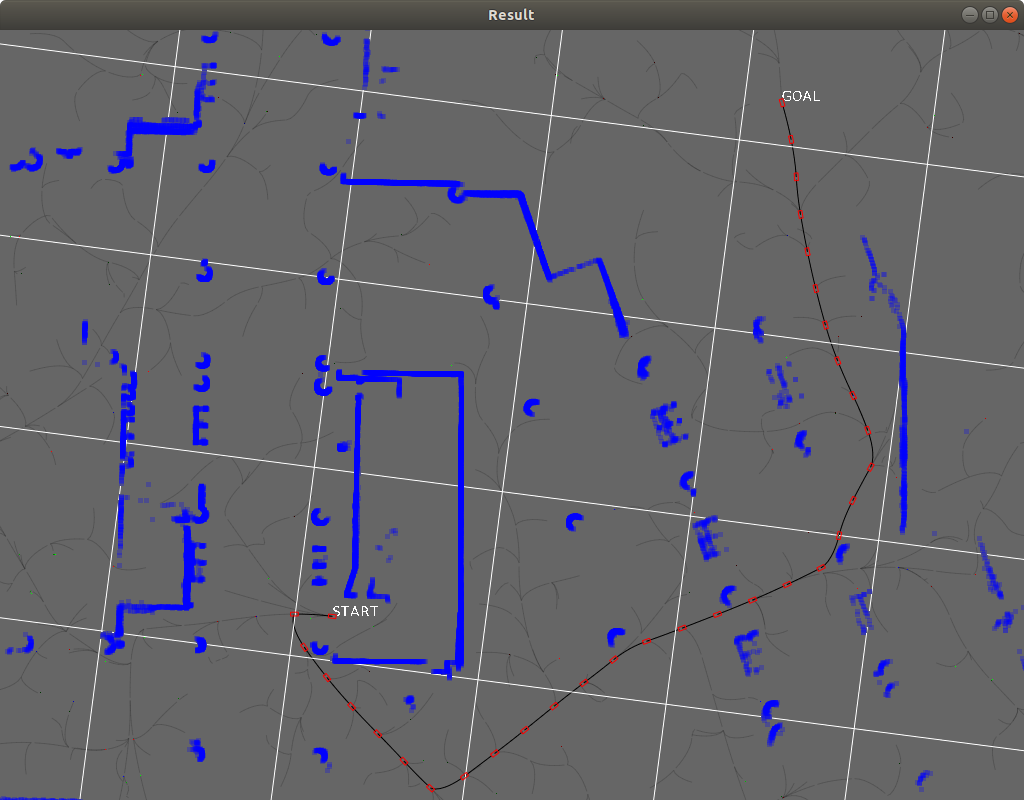
Example: nav_rrt_planning_example
This example demonstrates how to install a custom OpenGL shader replacing one of MRPT default ones.
In particular, the fragment shader is modified such that depth (raw depth, in opengl internal logarithmic scale) with respect to the eye is visualized as grayscale levels.
C++ example source code:
/* +------------------------------------------------------------------------+ | Mobile Robot Programming Toolkit (MRPT) | | https://www.mrpt.org/ | | | | Copyright (c) 2005-2026, Individual contributors, see AUTHORS file | | See: https://www.mrpt.org/Authors - All rights reserved. | | Released under BSD License. See: https://www.mrpt.org/License | +------------------------------------------------------------------------+ */ #include <mrpt/config/CConfigFile.h> #include <mrpt/gui/CDisplayWindow3D.h> #include <mrpt/io/CCompressedInputStream.h> #include <mrpt/maps/CSimpleMap.h> #include <mrpt/nav.h> #include <mrpt/random.h> #include <mrpt/serialization/CArchive.h> #include <mrpt/system/filesystem.h> // directoryExists(), ... #include <iostream> using namespace mrpt; using namespace mrpt::nav; using namespace mrpt::maps; using namespace std; // Load example grid map #include <mrpt/examples_config.h> string mySimpleMap( MRPT_EXAMPLES_BASE_DIRECTORY + string("../share/mrpt/datasets/malaga-cs-fac-building.simplemap.gz")); string myCfgFileName( MRPT_EXAMPLES_BASE_DIRECTORY + string("../share/mrpt/config_files/navigation-ptgs/" "ptrrt_config_example1.ini")); // ------------------------------------------------------ // TestRRT1 // ------------------------------------------------------ void TestRRT1() { mrpt::random::Randomize(); // Load the gridmap: CSimpleMap simplemap; ASSERT_FILE_EXISTS_(mySimpleMap); cout << "Loading map..."; { mrpt::io::CCompressedInputStream f(mySimpleMap); auto arch = mrpt::serialization::archiveFrom(f); arch >> simplemap; } cout << "Done! Number of sensory frames: " << simplemap.size() << endl; // Set planner params: // ------------------------------ mrpt::nav::PlannerRRT_SE2_TPS planner; // Parameters: planner.loadConfig(mrpt::config::CConfigFile(myCfgFileName)); planner.params.maxLength = 2.0; planner.params.minDistanceBetweenNewNodes = 0.10; planner.params.minAngBetweenNewNodes = mrpt::DEG2RAD(20); planner.params.goalBias = 0.05; // Logging: planner.params.save_3d_log_freq = 0; // 500; // save some iterations for debugging // End criteria: planner.end_criteria.acceptedDistToTarget = 0.25; planner.end_criteria.acceptedAngToTarget = 180.0_deg; // 180d=Any orientation is ok planner.end_criteria.maxComputationTime = 15.0; planner.end_criteria.minComputationTime = 1.0; // 0=accept first found acceptable solution // Init planner: // ------------------------------ planner.initialize(); // Set up planning problem: // ------------------------------ PlannerRRT_SE2_TPS::TPlannerResult planner_result; PlannerRRT_SE2_TPS::TPlannerInput planner_input; // Start & goal: planner_input.start_pose = mrpt::math::TPose2D(0, 0, 0); planner_input.goal_pose = mrpt::math::TPose2D(-20, -30, 0); // Obstacles: planner_input.obstacles_points.loadFromSimpleMap(simplemap); const auto bbox = planner_input.obstacles_points.boundingBox(); // Convert gridmap -> obstacle points: // gridmap.getAsPointCloud( planner_input.obstacles_points ); // Workspace bounding box: planner_input.world_bbox_min = {bbox.min.x, bbox.min.y, -M_PI}; planner_input.world_bbox_max = {bbox.max.x, bbox.max.y, +M_PI}; // size_t iters=0; // Show results in a GUI and keep improving: #if MRPT_HAS_WXWIDGETS mrpt::gui::CDisplayWindow3D win("Result", 1024, 800); while (win.isOpen()) #else for (size_t i = 0; i < 1; i++) #endif { // Refine solution or start over: bool refine_solution = false; // (iters++ % 5 != 0); // Start from scratch: if (!refine_solution) planner_result = PlannerRRT_SE2_TPS::TPlannerResult(); // Do path planning: planner.solve(planner_input, planner_result); cout << "Found goal_distance: " << planner_result.goal_distance << endl; cout << "Found path_cost: " << planner_result.path_cost << endl; cout << "Acceptable goal nodes: " << planner_result.acceptable_goal_node_ids.size() << endl; #if MRPT_HAS_WXWIDGETS // Show result in a GUI: mrpt::opengl::Scene::Ptr& scene = win.get3DSceneAndLock(); scene->clear(); PlannerRRT_SE2_TPS::TRenderPlannedPathOptions render_opts; render_opts.highlight_path_to_node_id = planner_result.best_goal_node_id; planner.renderMoveTree(*scene, planner_input, planner_result, render_opts); win.unlockAccess3DScene(); win.repaint(); win.waitForKey(); #endif } } int main(int argc, char** argv) { try { TestRRT1(); return 0; } catch (exception& e) { cout << "MRPT exception caught: " << e.what() << endl; return -1; } catch (...) { printf("Another exception!!"); return -1; } }