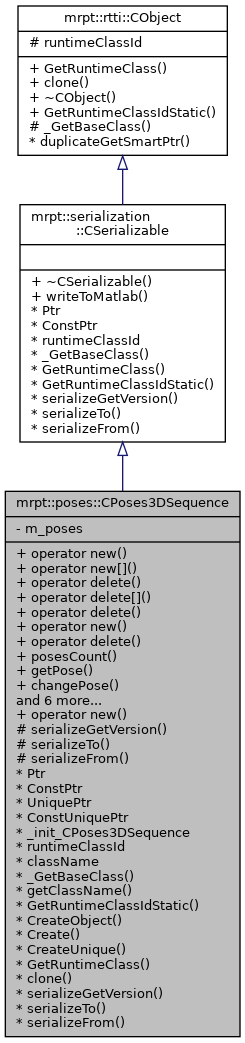
Detailed Description
This class stores a sequence of relative, incremental 3D poses.
It is useful as the bases storing unit for more complex probability particles and for computing the absolute pose of any intermediate pose.
- See also
- CPose3D, CMultiMetricMap
Definition at line 26 of file CPoses3DSequence.h.
#include <mrpt/poses/CPoses3DSequence.h>
Public Member Functions | |
| void * | operator new (size_t size) |
| void * | operator new[] (size_t size) |
| void | operator delete (void *ptr) noexcept |
| void | operator delete[] (void *ptr) noexcept |
| void | operator delete (void *memory, void *ptr) noexcept |
| void * | operator new (size_t size, const std::nothrow_t &) noexcept |
| void | operator delete (void *ptr, const std::nothrow_t &) noexcept |
| size_t | posesCount () |
| Returns the poses count in the sequence: More... | |
| void | getPose (unsigned int ind, CPose3D &outPose) |
| Reads the stored pose at index "ind", where the first one is 0, the last "posesCount() - 1". More... | |
| void | changePose (unsigned int ind, CPose3D &inPose) |
| Changes the stored pose at index "ind", where the first one is 0, the last "posesCount() - 1". More... | |
| void | appendPose (CPose3D &newPose) |
| Appends a new pose at the end of sequence. More... | |
| void | clear () |
| Clears the sequence. More... | |
| CPose3D | absolutePoseOf (unsigned int n) |
| Returns the absolute pose of a robot after moving "n" poses, so for "n=0" the origin pose (0,0,0deg) is returned, for "n=1" the first pose is returned, and for "n=posesCount()", the pose of robot after moving ALL poses is returned, all of them relative to the starting pose. More... | |
| CPose3D | absolutePoseAfterAll () |
| A shortcut for "absolutePoseOf( posesCount() )". More... | |
| float | computeTraveledDistanceAfter (unsigned int n) |
| Returns the traveled distance after moving "n" poses, so for "n=0" it returns 0, for "n=1" the first traveled distance, and for "n=posesCount()", the total distance after ALL movements. More... | |
| float | computeTraveledDistanceAfterAll () |
| Returns the traveled distance after ALL movements. More... | |
| virtual mxArray * | writeToMatlab () const |
Introduces a pure virtual method responsible for writing to a mxArray Matlab object, typically a MATLAB struct whose contents are documented in each derived class. More... | |
Static Public Member Functions | |
| static void * | operator new (size_t size, void *ptr) |
Protected Member Functions | |
CSerializable virtual methods | |
| uint8_t | serializeGetVersion () const override |
| Must return the current versioning number of the object. More... | |
| void | serializeTo (mrpt::serialization::CArchive &out) const override |
| Pure virtual method for writing (serializing) to an abstract archive. More... | |
| void | serializeFrom (mrpt::serialization::CArchive &in, uint8_t serial_version) override |
| Pure virtual method for reading (deserializing) from an abstract archive. More... | |
Private Attributes | |
| std::vector< mrpt::math::TPose3D > | m_poses |
| The internal sequence of poses, stored as relative, incremental poses, thus each one is situated just at the end point of last one, where the first one is referenced to (0,0,0deg) More... | |
RTTI stuff | |
| using | Ptr = std::shared_ptr< CPoses3DSequence > |
| using | ConstPtr = std::shared_ptr< const CPoses3DSequence > |
| using | UniquePtr = std::unique_ptr< CPoses3DSequence > |
| using | ConstUniquePtr = std::unique_ptr< const CPoses3DSequence > |
| static mrpt::rtti::CLASSINIT | _init_CPoses3DSequence |
| static const mrpt::rtti::TRuntimeClassId | runtimeClassId |
| static constexpr const char * | className = "CPoses3DSequence" |
| static const mrpt::rtti::TRuntimeClassId * | _GetBaseClass () |
| static constexpr auto | getClassName () |
| static const mrpt::rtti::TRuntimeClassId & | GetRuntimeClassIdStatic () |
| static mrpt::rtti::CObject * | CreateObject () |
| template<typename... Args> | |
| static Ptr | Create (Args &&... args) |
| template<typename... Args> | |
| static UniquePtr | CreateUnique (Args &&... args) |
| virtual const mrpt::rtti::TRuntimeClassId * | GetRuntimeClass () const override |
| Returns information about the class of an object in runtime. More... | |
| virtual mrpt::rtti::CObject * | clone () const override |
| Returns a deep copy (clone) of the object, indepently of its class. More... | |
Member Typedef Documentation
◆ ConstPtr
| using mrpt::poses::CPoses3DSequence::ConstPtr = std::shared_ptr<const CPoses3DSequence > |
Definition at line 28 of file CPoses3DSequence.h.
◆ ConstUniquePtr
| using mrpt::poses::CPoses3DSequence::ConstUniquePtr = std::unique_ptr<const CPoses3DSequence > |
Definition at line 28 of file CPoses3DSequence.h.
◆ Ptr
| using mrpt::poses::CPoses3DSequence::Ptr = std::shared_ptr< CPoses3DSequence > |
A type for the associated smart pointer
Definition at line 28 of file CPoses3DSequence.h.
◆ UniquePtr
| using mrpt::poses::CPoses3DSequence::UniquePtr = std::unique_ptr< CPoses3DSequence > |
Definition at line 28 of file CPoses3DSequence.h.
Member Function Documentation
◆ _GetBaseClass()
|
staticprotected |
◆ absolutePoseAfterAll()
| CPose3D CPoses3DSequence::absolutePoseAfterAll | ( | ) |
A shortcut for "absolutePoseOf( posesCount() )".
- See also
- absolutePoseOf, posesCount
Definition at line 102 of file CPoses3DSequence.cpp.
◆ absolutePoseOf()
| CPose3D CPoses3DSequence::absolutePoseOf | ( | unsigned int | n | ) |
Returns the absolute pose of a robot after moving "n" poses, so for "n=0" the origin pose (0,0,0deg) is returned, for "n=1" the first pose is returned, and for "n=posesCount()", the pose of robot after moving ALL poses is returned, all of them relative to the starting pose.
- Exceptions
-
std::exception On invalid index value
- See also
- absolutePoseAfterAll
Definition at line 86 of file CPoses3DSequence.cpp.
References THROW_EXCEPTION.
◆ appendPose()
Appends a new pose at the end of sequence.
Remember that poses are relative, incremental to the last one.
Definition at line 69 of file CPoses3DSequence.cpp.
References mrpt::poses::CPose3D::asTPose().
◆ changePose()
Changes the stored pose at index "ind", where the first one is 0, the last "posesCount() - 1".
- Exceptions
-
std::exception On invalid index value
Definition at line 59 of file CPoses3DSequence.cpp.
References mrpt::poses::CPose3D::asTPose(), and THROW_EXCEPTION.
◆ clear()
| void CPoses3DSequence::clear | ( | ) |
Clears the sequence.
Definition at line 77 of file CPoses3DSequence.cpp.
◆ clone()
|
overridevirtual |
Returns a deep copy (clone) of the object, indepently of its class.
Implements mrpt::rtti::CObject.
◆ computeTraveledDistanceAfter()
| float CPoses3DSequence::computeTraveledDistanceAfter | ( | unsigned int | n | ) |
Returns the traveled distance after moving "n" poses, so for "n=0" it returns 0, for "n=1" the first traveled distance, and for "n=posesCount()", the total distance after ALL movements.
- Exceptions
-
std::exception On invalid index value
- See also
- computeTraveledDistanceAfterAll
Definition at line 113 of file CPoses3DSequence.cpp.
References mrpt::math::norm(), and THROW_EXCEPTION.
◆ computeTraveledDistanceAfterAll()
| float CPoses3DSequence::computeTraveledDistanceAfterAll | ( | ) |
Returns the traveled distance after ALL movements.
A shortcut for "computeTraveledDistanceAfter( posesCount() )".
- See also
- computeTraveledDistanceAfter
Definition at line 129 of file CPoses3DSequence.cpp.
◆ Create()
|
inlinestatic |
Definition at line 28 of file CPoses3DSequence.h.
◆ CreateObject()
|
static |
◆ CreateUnique()
|
inlinestatic |
Definition at line 28 of file CPoses3DSequence.h.
◆ duplicateGetSmartPtr()
|
inlineinherited |
Returns a copy of the object, indepently of its class, as a smart pointer (the newly created object will exist as long as any copy of this smart pointer).
Definition at line 169 of file CObject.h.
References mrpt::rtti::CObject::clone().
Referenced by mrpt::obs::CRawlog::addActions(), and mrpt::obs::CRawlog::addObservations().
◆ getClassName()
|
inlinestaticconstexpr |
Definition at line 28 of file CPoses3DSequence.h.
◆ getPose()
Reads the stored pose at index "ind", where the first one is 0, the last "posesCount() - 1".
- Exceptions
-
std::exception On invalid index value
Definition at line 48 of file CPoses3DSequence.cpp.
References THROW_EXCEPTION.
◆ GetRuntimeClass()
|
overridevirtual |
Returns information about the class of an object in runtime.
Reimplemented from mrpt::serialization::CSerializable.
◆ GetRuntimeClassIdStatic()
|
static |
◆ operator delete() [1/3]
Definition at line 28 of file CPoses3DSequence.h.
◆ operator delete() [2/3]
Definition at line 28 of file CPoses3DSequence.h.
◆ operator delete() [3/3]
|
inlinenoexcept |
Definition at line 28 of file CPoses3DSequence.h.
◆ operator delete[]()
Definition at line 28 of file CPoses3DSequence.h.
◆ operator new() [1/3]
|
inline |
Definition at line 28 of file CPoses3DSequence.h.
◆ operator new() [2/3]
|
inlinenoexcept |
Definition at line 28 of file CPoses3DSequence.h.
◆ operator new() [3/3]
Definition at line 28 of file CPoses3DSequence.h.
◆ operator new[]()
|
inline |
Definition at line 28 of file CPoses3DSequence.h.
◆ posesCount()
| size_t CPoses3DSequence::posesCount | ( | ) |
Returns the poses count in the sequence:
Definition at line 21 of file CPoses3DSequence.cpp.
◆ serializeFrom()
|
overrideprotectedvirtual |
Pure virtual method for reading (deserializing) from an abstract archive.
Users don't call this method directly. Instead, use stream >> object;.
- Parameters
-
in The input binary stream where the object data must read from. version The version of the object stored in the stream: use this version number in your code to know how to read the incoming data.
- Exceptions
-
std::exception On any I/O error
Implements mrpt::serialization::CSerializable.
Definition at line 28 of file CPoses3DSequence.cpp.
References MRPT_THROW_UNKNOWN_SERIALIZATION_VERSION.
◆ serializeGetVersion()
|
overrideprotectedvirtual |
Must return the current versioning number of the object.
Start in zero for new classes, and increments each time there is a change in the stored format.
Implements mrpt::serialization::CSerializable.
Definition at line 22 of file CPoses3DSequence.cpp.
◆ serializeTo()
|
overrideprotectedvirtual |
Pure virtual method for writing (serializing) to an abstract archive.
Users don't call this method directly. Instead, use stream << object;.
- Exceptions
-
std::exception On any I/O error
Implements mrpt::serialization::CSerializable.
Definition at line 23 of file CPoses3DSequence.cpp.
References mrpt::serialization::CArchive::WriteAs().
◆ writeToMatlab()
|
inlinevirtualinherited |
Introduces a pure virtual method responsible for writing to a mxArray Matlab object, typically a MATLAB struct whose contents are documented in each derived class.
- Returns
- A new
mxArray(caller is responsible of memory freeing) or nullptr is class does not support conversion to MATLAB.
Definition at line 70 of file CSerializable.h.
Member Data Documentation
◆ _init_CPoses3DSequence
|
staticprotected |
Definition at line 28 of file CPoses3DSequence.h.
◆ className
|
staticconstexpr |
Definition at line 28 of file CPoses3DSequence.h.
◆ m_poses
|
private |
The internal sequence of poses, stored as relative, incremental poses, thus each one is situated just at the end point of last one, where the first one is referenced to (0,0,0deg)
Definition at line 90 of file CPoses3DSequence.h.
◆ runtimeClassId
|
staticprotected |
Definition at line 28 of file CPoses3DSequence.h.