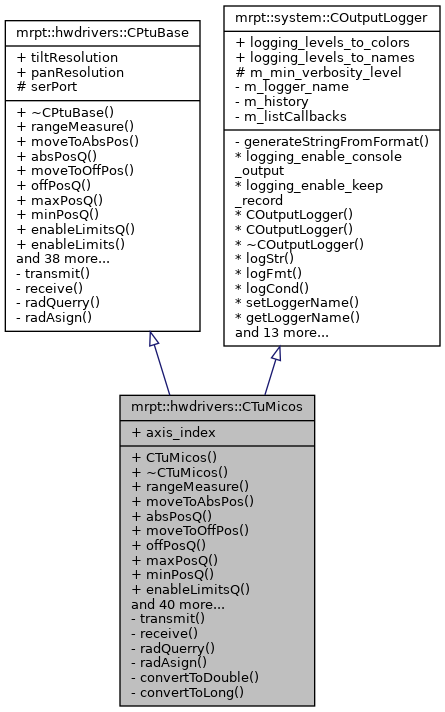
Detailed Description
This class implements initialization and comunication methods to control a Tilt Unit model DT-80, working in radians .
Definition at line 25 of file CTuMicos.h.
#include <mrpt/hwdrivers/CTuMicos.h>
Public Member Functions | |
| CTuMicos () | |
| Default constructor. More... | |
| virtual | ~CTuMicos () |
| Destructor. More... | |
| virtual bool | rangeMeasure () |
| Search limit forward. More... | |
| virtual bool | moveToAbsPos (char axis, double nRad) |
| Specification of positions in absolute terms. More... | |
| virtual bool | absPosQ (char axis, double &nRad) |
| Query position in absolute terms. More... | |
| virtual bool | moveToOffPos (char axis, double nRad) |
| Specify desired axis position as an offset from the current position. More... | |
| virtual bool | offPosQ (char axis, double &nRad) |
| Query position in relative terms. More... | |
| virtual bool | maxPosQ (char axis, double &nRad) |
| Query max movement limit of a axis in absolute terms. More... | |
| virtual bool | minPosQ (char axis, double &nRad) |
| Query min movement limit of a axis in absolute terms. More... | |
| virtual bool | enableLimitsQ (bool &enable) |
| Query if exist movement limits. More... | |
| virtual bool | enableLimits (bool set) |
| Enable/Disable movement limits. More... | |
| virtual bool | inmediateExecution (bool set) |
| With I mode (default) instructs pan-tilt unit to immediately execute positional commands. More... | |
| virtual bool | aWait (void) |
| Wait the finish of the last position command to continue accept commands. More... | |
| virtual bool | haltAll () |
| Inmediately stop all. More... | |
| virtual bool | halt (char axis) |
| Inmediately stop. More... | |
| virtual bool | speed (char axis, double radSec) |
| Specification of turn speed. More... | |
| virtual bool | speedQ (char axis, double &radSec) |
| Query turn speed. More... | |
| virtual bool | aceleration (char axis, double radSec2) |
| Specification (de/a)celeration in turn. More... | |
| virtual bool | acelerationQ (char axis, double &radSec2) |
| Query (de/a)celeration in turn. More... | |
| virtual bool | baseSpeed (char axis, double radSec) |
| Specification of velocity to which start and finish the (de/a)celeration. More... | |
| virtual bool | baseSpeedQ (char axis, double &radSec) |
| Query velocity to which start and finish the (de/a)celeration. More... | |
| virtual bool | upperSpeed (char axis, double radSec) |
| Specification of velocity upper limit. More... | |
| virtual bool | upperSpeedQ (char axis, double &radSec) |
| Query velocity upper limit. More... | |
| virtual bool | lowerSpeed (char axis, double radSec) |
| Specification of velocity lower limit. More... | |
| virtual bool | lowerSpeedQ (char axis, double &radSec) |
| Query velocity lower limit. More... | |
| virtual bool | reset (void) |
| Reset PTU to initial state. More... | |
| virtual bool | save (void) |
| Save or restart default values. More... | |
| virtual bool | restoreDefaults (void) |
| Restore default values. More... | |
| virtual bool | restoreFactoryDefaults (void) |
| Restore factory default values. More... | |
| virtual bool | version (char *nVersion) |
| Version and CopyRights. More... | |
| virtual void | nversion (double &nVersion) |
| Number of version. More... | |
| virtual bool | powerModeQ (bool transit, char &mode) |
| Query power mode. More... | |
| virtual bool | powerMode (bool transit, char mode) |
| Specification of power mode. More... | |
| bool | clear () |
| Clear controller internal stack. More... | |
| virtual bool | setLimits (char axis, double &l, double &u) |
| Set limits of movement. More... | |
| virtual bool | changeMotionDir () |
| virtual int | checkErrors () |
| Check errors, returns 0 if there are not errors or error code otherwise. More... | |
| virtual void | clearErrors () |
| Clear errors. More... | |
| virtual bool | init (const std::string &port) |
| PTU and serial port initialization. More... | |
| virtual void | close () |
| Close Connection with serial port. More... | |
| virtual double | radError (char axis, double nRadMoved) |
| To obtains the mistake for use discrete values when the movement is expressed in radians. More... | |
| virtual long | radToPos (char axis, double nRad) |
| To obtain the discrete value for a number of radians. More... | |
| virtual double | posToRad (char axis, long nPos) |
| To obtain the number of radians for a discrete value. More... | |
| virtual bool | scan (char axis, int wait, float initial, float final, double radPre) |
| Performs a scan in the axis indicated and whit the precision desired. More... | |
| virtual bool | verboseQ (bool &modo) |
| Query verbose mode. More... | |
| virtual bool | verbose (bool set) |
| Set verbose. More... | |
| virtual bool | echoModeQ (bool &mode) |
| Query echo mode. More... | |
| virtual bool | echoMode (bool mode) |
| Enable/Disable echo response with command. More... | |
| virtual bool | resolution (void) |
| Query the pan and tilt resolution per position moved and initialize local atributes. More... | |
| virtual double | status (double &rad) |
| Check if ptu is moving. More... | |
Public Attributes | |
| int | axis_index |
| double | tiltResolution |
| double | panResolution |
Static Public Attributes | |
| static mrpt::system::TConsoleColor | logging_levels_to_colors [NUMBER_OF_VERBOSITY_LEVELS] |
| Map from VerbosityLevels to their corresponding mrpt::system::TConsoleColor. More... | |
| static std::string | logging_levels_to_names [NUMBER_OF_VERBOSITY_LEVELS] |
| Map from VerbosityLevels to their corresponding names. More... | |
Protected Attributes | |
| mrpt::comms::CSerialPort | serPort |
| VerbosityLevel | m_min_verbosity_level |
| Provided messages with VerbosityLevel smaller than this value shall be ignored. More... | |
Private Member Functions | |
| virtual bool | transmit (const char *command) |
| To transmition commands to the PTU. More... | |
| virtual bool | receive (const char *command, char *response) |
| To receive the responseof the PTU. More... | |
| virtual bool | radQuerry (char axis, char command, double &nRad) |
| Used to obtains a number of radians. More... | |
| virtual bool | radAsign (char axis, char command, double nRad) |
| Method used for asign a number of radians with a command. More... | |
| std::string | generateStringFromFormat (const char *fmt, va_list argp) const |
| Helper method for generating a std::string instance from printf-like arguments. More... | |
Static Private Member Functions | |
| static double | convertToDouble (char *sDouble) |
| Convert string to double. More... | |
| static long | convertToLong (char *sLong) |
| Convert string to long. More... | |
Private Attributes | |
| std::string | m_logger_name |
| std::deque< TMsg > | m_history |
| std::deque< output_logger_callback_t > | m_listCallbacks |
Logging methods | |
| bool | logging_enable_console_output |
| [Default=true] Set it to false in case you don't want the logged messages to be dumped to the output automatically. More... | |
| bool | logging_enable_keep_record |
| [Default=false] Enables storing all messages into an internal list. More... | |
| void | logStr (const VerbosityLevel level, const std::string &msg_str) const |
| Main method to add the specified message string to the logger. More... | |
| void | logFmt (const VerbosityLevel level, const char *fmt,...) const MRPT_printf_format_check(3 |
| Alternative logging method, which mimics the printf behavior. More... | |
| void void | logCond (const VerbosityLevel level, bool cond, const std::string &msg_str) const |
| Log the given message only if the condition is satisfied. More... | |
| void | setLoggerName (const std::string &name) |
| Set the name of the COutputLogger instance. More... | |
| std::string | getLoggerName () const |
| Return the name of the COutputLogger instance. More... | |
| void | setMinLoggingLevel (const VerbosityLevel level) |
| Set the minimum logging level for which the incoming logs are going to be taken into account. More... | |
| void | setVerbosityLevel (const VerbosityLevel level) |
| alias of setMinLoggingLevel() More... | |
| VerbosityLevel | getMinLoggingLevel () const |
| bool | isLoggingLevelVisible (VerbosityLevel level) const |
| void | getLogAsString (std::string &log_contents) const |
| Fill the provided string with the contents of the logger's history in std::string representation. More... | |
| std::string | getLogAsString () const |
| Get the history of COutputLogger instance in a string representation. More... | |
| void | writeLogToFile (const std::string *fname_in=NULL) const |
| Write the contents of the COutputLogger instance to an external file. More... | |
| void | dumpLogToConsole () const |
| Dump the current contents of the COutputLogger instance in the terminal window. More... | |
| std::string | getLoggerLastMsg () const |
| Return the last Tmsg instance registered in the logger history. More... | |
| void | getLoggerLastMsg (std::string &msg_str) const |
| Fill inputtted string with the contents of the last message in history. More... | |
| void | loggerReset () |
| Reset the contents of the logger instance. More... | |
| void | logRegisterCallback (output_logger_callback_t userFunc) |
| bool | logDeregisterCallback (output_logger_callback_t userFunc) |
Constructor & Destructor Documentation
◆ CTuMicos()
|
inline |
Default constructor.
Definition at line 30 of file CTuMicos.h.
◆ ~CTuMicos()
|
inlinevirtual |
Member Function Documentation
◆ absPosQ()
|
virtual |
Query position in absolute terms.
Implements mrpt::hwdrivers::CPtuBase.
Definition at line 63 of file CTuMicos.cpp.
◆ aceleration()
|
virtual |
Specification (de/a)celeration in turn.
Implements mrpt::hwdrivers::CPtuBase.
Definition at line 131 of file CTuMicos.cpp.
◆ acelerationQ()
|
virtual |
Query (de/a)celeration in turn.
Implements mrpt::hwdrivers::CPtuBase.
Definition at line 142 of file CTuMicos.cpp.
◆ aWait()
|
virtual |
Wait the finish of the last position command to continue accept commands.
Implements mrpt::hwdrivers::CPtuBase.
Definition at line 252 of file CTuMicos.cpp.
◆ baseSpeed()
|
virtual |
Specification of velocity to which start and finish the (de/a)celeration.
Implements mrpt::hwdrivers::CPtuBase.
Definition at line 153 of file CTuMicos.cpp.
◆ baseSpeedQ()
|
virtual |
Query velocity to which start and finish the (de/a)celeration.
Implements mrpt::hwdrivers::CPtuBase.
Definition at line 164 of file CTuMicos.cpp.
◆ changeMotionDir()
|
virtual |
Implements mrpt::hwdrivers::CPtuBase.
Definition at line 406 of file CTuMicos.cpp.
References mrpt::system::os::sprintf().
◆ checkErrors()
|
virtual |
Check errors, returns 0 if there are not errors or error code otherwise.
Implements mrpt::hwdrivers::CPtuBase.
Definition at line 782 of file CTuMicos.cpp.
◆ clear()
| bool CTuMicos::clear | ( | ) |
Clear controller internal stack.
Definition at line 378 of file CTuMicos.cpp.
References mrpt::system::os::sprintf().
◆ clearErrors()
|
inlinevirtual |
◆ close()
|
virtual |
Close Connection with serial port.
Implements mrpt::hwdrivers::CPtuBase.
Definition at line 494 of file CTuMicos.cpp.
Referenced by ~CTuMicos().
◆ convertToDouble()
|
staticprivate |
Convert string to double.
Definition at line 770 of file CTuMicos.cpp.
◆ convertToLong()
|
staticprivate |
Convert string to long.
Definition at line 759 of file CTuMicos.cpp.
◆ dumpLogToConsole()
|
inherited |
Dump the current contents of the COutputLogger instance in the terminal window.
- See also
- writeToFile
Definition at line 179 of file COutputLogger.cpp.
◆ echoMode()
|
virtual |
Enable/Disable echo response with command.
Implements mrpt::hwdrivers::CPtuBase.
Definition at line 605 of file CTuMicos.cpp.
◆ echoModeQ()
|
virtual |
◆ enableLimits()
|
virtual |
Enable/Disable movement limits.
Implements mrpt::hwdrivers::CPtuBase.
Definition at line 230 of file CTuMicos.cpp.
◆ enableLimitsQ()
|
virtual |
Query if exist movement limits.
Implements mrpt::hwdrivers::CPtuBase.
Definition at line 219 of file CTuMicos.cpp.
◆ generateStringFromFormat()
|
privateinherited |
Helper method for generating a std::string instance from printf-like arguments.
Definition at line 99 of file COutputLogger.cpp.
References mrpt::system::os::vsnprintf().
◆ getLogAsString() [1/2]
|
inherited |
Get the history of COutputLogger instance in a string representation.
Definition at line 148 of file COutputLogger.cpp.
Referenced by mrpt::graphslam::deciders::CICPCriteriaNRD< GRAPH_T >::getDescriptiveReport().
◆ getLogAsString() [2/2]
|
inherited |
Fill the provided string with the contents of the logger's history in std::string representation.
Definition at line 143 of file COutputLogger.cpp.
◆ getLoggerLastMsg() [1/2]
|
inherited |
Return the last Tmsg instance registered in the logger history.
Definition at line 184 of file COutputLogger.cpp.
References mrpt::system::COutputLogger::TMsg::getAsString().
◆ getLoggerLastMsg() [2/2]
|
inherited |
Fill inputtted string with the contents of the last message in history.
Definition at line 190 of file COutputLogger.cpp.
◆ getLoggerName()
|
inherited |
Return the name of the COutputLogger instance.
- See also
- setLoggerName
Definition at line 132 of file COutputLogger.cpp.
Referenced by mrpt::system::COutputLogger::TMsg::TMsg().
◆ getMinLoggingLevel()
|
inlineinherited |
- See also
- setMinLoggingLevel
Definition at line 200 of file system/COutputLogger.h.
References mrpt::system::COutputLogger::m_min_verbosity_level.
Referenced by mrpt::maps::CRandomFieldGridMap2D::isEnabledVerbose(), and mrpt::slam::CMetricMapBuilderRBPF::processActionObservation().
◆ halt()
|
virtual |
Inmediately stop.
Implements mrpt::hwdrivers::CPtuBase.
Definition at line 268 of file CTuMicos.cpp.
References mrpt::system::os::sprintf().
◆ haltAll()
|
virtual |
Inmediately stop all.
Implements mrpt::hwdrivers::CPtuBase.
Definition at line 257 of file CTuMicos.cpp.
◆ init()
|
virtual |
PTU and serial port initialization.
Implements mrpt::hwdrivers::CPtuBase.
Definition at line 432 of file CTuMicos.cpp.
References mrpt::containers::clear(), and MRPT_LOG_ERROR_STREAM.
◆ inmediateExecution()
|
virtual |
With I mode (default) instructs pan-tilt unit to immediately execute positional commands.
In S mode instructs pan-tilt unit to execute positional commands only when an Await Position Command Completion command is executed or when put into Immediate Execution Mode.
Implements mrpt::hwdrivers::CPtuBase.
Definition at line 241 of file CTuMicos.cpp.
◆ isLoggingLevelVisible()
|
inlineinherited |
Definition at line 201 of file system/COutputLogger.h.
References mrpt::system::COutputLogger::m_min_verbosity_level.
Referenced by mrpt::slam::CMetricMapBuilderRBPF::processActionObservation(), and mrpt::system::COutputLoggerStreamWrapper::~COutputLoggerStreamWrapper().
◆ logCond()
|
inherited |
Log the given message only if the condition is satisfied.
- See also
- log, logFmt
Definition at line 120 of file COutputLogger.cpp.
◆ logDeregisterCallback()
|
inherited |
- Returns
- true if an entry was found and deleted.
Definition at line 287 of file COutputLogger.cpp.
References getAddress().
◆ logFmt()
|
inherited |
Alternative logging method, which mimics the printf behavior.
Handy for not having to first use mrpt::format to pass a std::string message to logStr
Definition at line 80 of file COutputLogger.cpp.
Referenced by mrpt::graphslam::deciders::CICPCriteriaNRD< GRAPH_T >::CICPCriteriaNRD(), mrpt::hmtslam::CTopLCDetector_GridMatching::computeTopologicalObservationModel(), CGraphSlamHandler< GRAPH_T >::execute(), mrpt::math::CLevenbergMarquardtTempl< VECTORTYPE, USERPARAM >::execute(), CGraphSlamHandler< GRAPH_T >::initOutputDir(), CGraphSlamHandler< GRAPH_T >::initVisualization(), mrpt::nav::CNavigatorManualSequence::navigationStep(), mrpt::nav::CAbstractNavigator::performNavigationStepNavigating(), CGraphSlamHandler< GRAPH_T >::readConfigFname(), CGraphSlamHandler< GRAPH_T >::saveResults(), CGraphSlamHandler< GRAPH_T >::setResultsDirName(), mrpt::nav::CReactiveNavigationSystem::STEP1_InitPTGs(), and CGraphSlamHandler< GRAPH_T >::~CGraphSlamHandler().
◆ loggerReset()
|
inherited |
Reset the contents of the logger instance.
Called upon construction.
Definition at line 195 of file COutputLogger.cpp.
References mrpt::system::LVL_INFO.
◆ logRegisterCallback()
|
inherited |
Definition at line 274 of file COutputLogger.cpp.
◆ logStr()
|
inherited |
Main method to add the specified message string to the logger.
Definition at line 61 of file COutputLogger.cpp.
References mrpt::system::COutputLogger::TMsg::body, mrpt::system::COutputLogger::TMsg::dumpToConsole(), mrpt::system::COutputLogger::TMsg::level, mrpt::system::COutputLogger::TMsg::name, and mrpt::system::COutputLogger::TMsg::timestamp.
Referenced by mrpt::slam::PF_implementation< mrpt::math::TPose3D, CMonteCarloLocalization3D, mrpt::bayes::particle_storage_mode::VALUE >::PF_SLAM_implementation_pfAuxiliaryPFStandardAndOptimal(), mrpt::nav::CReactiveNavigationSystem::STEP1_InitPTGs(), and mrpt::system::COutputLoggerStreamWrapper::~COutputLoggerStreamWrapper().
◆ lowerSpeed()
|
virtual |
Specification of velocity lower limit.
Implements mrpt::hwdrivers::CPtuBase.
Definition at line 197 of file CTuMicos.cpp.
◆ lowerSpeedQ()
|
virtual |
Query velocity lower limit.
Implements mrpt::hwdrivers::CPtuBase.
Definition at line 208 of file CTuMicos.cpp.
References DEG2RAD.
◆ maxPosQ()
|
virtual |
Query max movement limit of a axis in absolute terms.
Implements mrpt::hwdrivers::CPtuBase.
Definition at line 95 of file CTuMicos.cpp.
◆ minPosQ()
|
virtual |
Query min movement limit of a axis in absolute terms.
Implements mrpt::hwdrivers::CPtuBase.
Definition at line 104 of file CTuMicos.cpp.
◆ moveToAbsPos()
|
virtual |
Specification of positions in absolute terms.
Implements mrpt::hwdrivers::CPtuBase.
Definition at line 49 of file CTuMicos.cpp.
References RAD2DEG, and mrpt::system::os::sprintf().
◆ moveToOffPos()
|
virtual |
Specify desired axis position as an offset from the current position.
This method recives the number of radians to move.
Implements mrpt::hwdrivers::CPtuBase.
Definition at line 72 of file CTuMicos.cpp.
References RAD2DEG, and mrpt::system::os::sprintf().
◆ nversion()
|
virtual |
Number of version.
Implements mrpt::hwdrivers::CPtuBase.
Definition at line 346 of file CTuMicos.cpp.
◆ offPosQ()
|
virtual |
Query position in relative terms.
Implements mrpt::hwdrivers::CPtuBase.
Definition at line 86 of file CTuMicos.cpp.
◆ posToRad()
|
virtual |
To obtain the number of radians for a discrete value.
Implements mrpt::hwdrivers::CPtuBase.
Definition at line 748 of file CTuMicos.cpp.
◆ powerMode()
|
virtual |
Specification of power mode.
Implements mrpt::hwdrivers::CPtuBase.
Definition at line 367 of file CTuMicos.cpp.
◆ powerModeQ()
|
virtual |
Query power mode.
Implements mrpt::hwdrivers::CPtuBase.
Definition at line 356 of file CTuMicos.cpp.
◆ radAsign()
|
privatevirtual |
Method used for asign a number of radians with a command.
Implements mrpt::hwdrivers::CPtuBase.
Definition at line 709 of file CTuMicos.cpp.
References RAD2DEG, and mrpt::system::os::sprintf().
◆ radError()
|
virtual |
To obtains the mistake for use discrete values when the movement is expressed in radians.
Parameters are the absolute position in radians and the axis desired
Implements mrpt::hwdrivers::CPtuBase.
Definition at line 508 of file CTuMicos.cpp.
◆ radQuerry()
|
privatevirtual |
Used to obtains a number of radians.
Implements mrpt::hwdrivers::CPtuBase.
Definition at line 632 of file CTuMicos.cpp.
References DEG2RAD, mrpt::system::os::sprintf(), and mrpt::system::strtok().
◆ radToPos()
|
virtual |
To obtain the discrete value for a number of radians.
Implements mrpt::hwdrivers::CPtuBase.
Definition at line 737 of file CTuMicos.cpp.
◆ rangeMeasure()
|
virtual |
Search limit forward.
Implements mrpt::hwdrivers::CPtuBase.
Definition at line 29 of file CTuMicos.cpp.
References mrpt::system::os::sprintf().
◆ receive()
|
privatevirtual |
To receive the responseof the PTU.
Implements mrpt::hwdrivers::CPtuBase.
Definition at line 542 of file CTuMicos.cpp.
References mrpt::system::os::strcpy().
◆ reset()
|
virtual |
Reset PTU to initial state.
Implements mrpt::hwdrivers::CPtuBase.
Definition at line 282 of file CTuMicos.cpp.
References mrpt::system::os::sprintf().
◆ resolution()
|
virtual |
Query the pan and tilt resolution per position moved and initialize local atributes.
Implements mrpt::hwdrivers::CPtuBase.
Definition at line 616 of file CTuMicos.cpp.
◆ restoreDefaults()
|
virtual |
Restore default values.
Implements mrpt::hwdrivers::CPtuBase.
Definition at line 313 of file CTuMicos.cpp.
◆ restoreFactoryDefaults()
|
virtual |
Restore factory default values.
Implements mrpt::hwdrivers::CPtuBase.
Definition at line 324 of file CTuMicos.cpp.
◆ save()
|
virtual |
Save or restart default values.
Implements mrpt::hwdrivers::CPtuBase.
Definition at line 302 of file CTuMicos.cpp.
◆ scan()
|
virtual |
Performs a scan in the axis indicated and whit the precision desired.
- Parameters
-
<axis> {Pan or Till}
<tWait> {Wait time betwen commands}
<initial> {initial position} <final> {final position} <radPre> {radians precision for the scan}
Implements mrpt::hwdrivers::CPtuBase.
Definition at line 725 of file CTuMicos.cpp.
◆ setLimits()
|
virtual |
Set limits of movement.
Implements mrpt::hwdrivers::CPtuBase.
Definition at line 392 of file CTuMicos.cpp.
References mrpt::system::os::sprintf().
◆ setLoggerName()
|
inherited |
Set the name of the COutputLogger instance.
- See also
- getLoggerName
Definition at line 127 of file COutputLogger.cpp.
Referenced by mrpt::slam::CMetricMapBuilderICP::CMetricMapBuilderICP(), mrpt::slam::CMetricMapBuilderRBPF::CMetricMapBuilderRBPF(), mrpt::slam::CMonteCarloLocalization2D::CMonteCarloLocalization2D(), mrpt::slam::CMonteCarloLocalization3D::CMonteCarloLocalization3D(), and mrpt::graphslam::CWindowManager::initCWindowManager().
◆ setMinLoggingLevel()
|
inherited |
Set the minimum logging level for which the incoming logs are going to be taken into account.
String messages with specified VerbosityLevel smaller than the min, will not be outputted to the screen and neither will a record of them be stored in by the COutputLogger instance
Definition at line 133 of file COutputLogger.cpp.
Referenced by mrpt::maps::CRandomFieldGridMap2D::enableVerbose(), mrpt::math::CLevenbergMarquardtTempl< VECTORTYPE, USERPARAM >::execute(), mrpt::hwdrivers::CHokuyoURG::initialize(), and mrpt::graphslam::deciders::CICPCriteriaNRD< GRAPH_T >::loadParams().
◆ setVerbosityLevel()
|
inherited |
alias of setMinLoggingLevel()
Definition at line 138 of file COutputLogger.cpp.
Referenced by mrpt::nav::CAbstractNavigator::CAbstractNavigator(), mrpt::slam::CMetricMapBuilderRBPF::CMetricMapBuilderRBPF(), mrpt::comms::CServerTCPSocket::CServerTCPSocket(), mrpt::slam::CMetricMapBuilderRBPF::processActionObservation(), and mrpt::math::ransac_detect_2D_lines().
◆ speed()
|
virtual |
Specification of turn speed.
Implements mrpt::hwdrivers::CPtuBase.
Definition at line 113 of file CTuMicos.cpp.
◆ speedQ()
|
virtual |
Query turn speed.
Implements mrpt::hwdrivers::CPtuBase.
Definition at line 122 of file CTuMicos.cpp.
◆ status()
|
virtual |
Check if ptu is moving.
Implements mrpt::hwdrivers::CPtuBase.
Definition at line 627 of file CTuMicos.cpp.
◆ transmit()
|
privatevirtual |
To transmition commands to the PTU.
Implements mrpt::hwdrivers::CPtuBase.
Definition at line 519 of file CTuMicos.cpp.
References mrpt::system::os::strcat(), and mrpt::system::os::strcpy().
◆ upperSpeed()
|
virtual |
Specification of velocity upper limit.
Implements mrpt::hwdrivers::CPtuBase.
Definition at line 175 of file CTuMicos.cpp.
◆ upperSpeedQ()
|
virtual |
Query velocity upper limit.
Implements mrpt::hwdrivers::CPtuBase.
Definition at line 186 of file CTuMicos.cpp.
References DEG2RAD.
◆ verbose()
|
virtual |
Set verbose.
\conde Example of response with FV (verbose) active: FV * PP * Current pan position is 0 Example of response with FT (terse) active: FT * PP * 0
Implements mrpt::hwdrivers::CPtuBase.
Definition at line 583 of file CTuMicos.cpp.
◆ verboseQ()
|
virtual |
Query verbose mode.
Implements mrpt::hwdrivers::CPtuBase.
Definition at line 572 of file CTuMicos.cpp.
◆ version()
|
virtual |
Version and CopyRights.
Implements mrpt::hwdrivers::CPtuBase.
Definition at line 335 of file CTuMicos.cpp.
◆ writeLogToFile()
|
inherited |
Write the contents of the COutputLogger instance to an external file.
Upon call to this method, COutputLogger dumps the contents of all the logged commands so far to the specified external file. By default the filename is set to ${LOGGERNAME}.log except if the fname parameter is provided
- See also
- dumpToConsole, getAsString
Definition at line 154 of file COutputLogger.cpp.
References ASSERTMSG_, and mrpt::format().
Member Data Documentation
◆ axis_index
| int mrpt::hwdrivers::CTuMicos::axis_index |
Definition at line 326 of file CTuMicos.h.
◆ logging_enable_console_output
|
inherited |
[Default=true] Set it to false in case you don't want the logged messages to be dumped to the output automatically.
Definition at line 239 of file system/COutputLogger.h.
◆ logging_enable_keep_record
|
inherited |
[Default=false] Enables storing all messages into an internal list.
- See also
- writeLogToFile, getLogAsString
Definition at line 242 of file system/COutputLogger.h.
◆ logging_levels_to_colors
|
staticinherited |
Map from VerbosityLevels to their corresponding mrpt::system::TConsoleColor.
Implementation file for the COutputLogger header class.
Handy for coloring the input based on the verbosity of the message
Definition at line 124 of file system/COutputLogger.h.
Referenced by mrpt::system::COutputLogger::TMsg::dumpToConsole().
◆ logging_levels_to_names
|
staticinherited |
Map from VerbosityLevels to their corresponding names.
Handy for printing the current message VerbosityLevel along with the actual content
Definition at line 129 of file system/COutputLogger.h.
Referenced by mrpt::system::COutputLogger::TMsg::getAsString().
◆ m_history
|
mutableprivateinherited |
Definition at line 312 of file system/COutputLogger.h.
◆ m_listCallbacks
|
privateinherited |
Definition at line 314 of file system/COutputLogger.h.
◆ m_logger_name
|
privateinherited |
Definition at line 310 of file system/COutputLogger.h.
◆ m_min_verbosity_level
|
protectedinherited |
Provided messages with VerbosityLevel smaller than this value shall be ignored.
Definition at line 252 of file system/COutputLogger.h.
Referenced by mrpt::system::COutputLogger::getMinLoggingLevel(), and mrpt::system::COutputLogger::isLoggingLevelVisible().
◆ panResolution
|
inherited |
Definition at line 28 of file CPtuBase.h.
◆ serPort
|
protectedinherited |
Definition at line 31 of file CPtuBase.h.
◆ tiltResolution
|
inherited |
Definition at line 28 of file CPtuBase.h.