Detailed Description
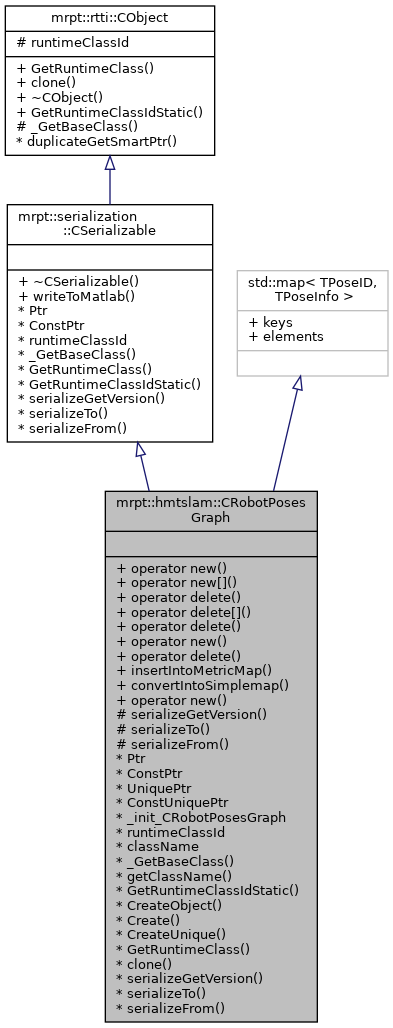
Auxiliary class used in mrpt::slam::CLocalMetricHypothesis for HMT-SLAM; this class stores a set of robot poses and its sensory frames and pose PDF, for being stored in a HMT-map as a serializable object in annotation NODE_ANNOTATION_POSES_GRAPH.
Definition at line 39 of file CRobotPosesGraph.h.
#include <mrpt/hmtslam/CRobotPosesGraph.h>
Public Member Functions | |
| void * | operator new (size_t size) |
| void * | operator new[] (size_t size) |
| void | operator delete (void *ptr) noexcept |
| void | operator delete[] (void *ptr) noexcept |
| void | operator delete (void *memory, void *ptr) noexcept |
| void * | operator new (size_t size, const std::nothrow_t &) noexcept |
| void | operator delete (void *ptr, const std::nothrow_t &) noexcept |
| void | insertIntoMetricMap (mrpt::maps::CMultiMetricMap &metricMap) const |
| Insert all the observations in the map (without erasing previous contents). More... | |
| void | convertIntoSimplemap (mrpt::maps::CSimpleMap &out_simplemap) const |
| Converts the contents of this object into a 'simplemap' (mrpt::maps::CSimpleMap) object. More... | |
| virtual mxArray * | writeToMatlab () const |
Introduces a pure virtual method responsible for writing to a mxArray Matlab object, typically a MATLAB struct whose contents are documented in each derived class. More... | |
Static Public Member Functions | |
| static void * | operator new (size_t size, void *ptr) |
Public Attributes | |
| K | keys |
| STL member. More... | |
| T | elements |
| STL member. More... | |
Protected Member Functions | |
CSerializable virtual methods | |
| uint8_t | serializeGetVersion () const override |
| Must return the current versioning number of the object. More... | |
| void | serializeTo (mrpt::serialization::CArchive &out) const override |
| Pure virtual method for writing (serializing) to an abstract archive. More... | |
| void | serializeFrom (mrpt::serialization::CArchive &in, uint8_t serial_version) override |
| Pure virtual method for reading (deserializing) from an abstract archive. More... | |
RTTI stuff | |
| using | Ptr = std::shared_ptr< CRobotPosesGraph > |
| using | ConstPtr = std::shared_ptr< const CRobotPosesGraph > |
| using | UniquePtr = std::unique_ptr< CRobotPosesGraph > |
| using | ConstUniquePtr = std::unique_ptr< const CRobotPosesGraph > |
| static mrpt::rtti::CLASSINIT | _init_CRobotPosesGraph |
| static const mrpt::rtti::TRuntimeClassId | runtimeClassId |
| static constexpr const char * | className = "CRobotPosesGraph" |
| static const mrpt::rtti::TRuntimeClassId * | _GetBaseClass () |
| static constexpr auto | getClassName () |
| static const mrpt::rtti::TRuntimeClassId & | GetRuntimeClassIdStatic () |
| static mrpt::rtti::CObject * | CreateObject () |
| template<typename... Args> | |
| static Ptr | Create (Args &&... args) |
| template<typename... Args> | |
| static UniquePtr | CreateUnique (Args &&... args) |
| virtual const mrpt::rtti::TRuntimeClassId * | GetRuntimeClass () const override |
| Returns information about the class of an object in runtime. More... | |
| virtual mrpt::rtti::CObject * | clone () const override |
| Returns a deep copy (clone) of the object, indepently of its class. More... | |
Member Typedef Documentation
◆ ConstPtr
| using mrpt::hmtslam::CRobotPosesGraph::ConstPtr = std::shared_ptr<const CRobotPosesGraph > |
Definition at line 42 of file CRobotPosesGraph.h.
◆ ConstUniquePtr
| using mrpt::hmtslam::CRobotPosesGraph::ConstUniquePtr = std::unique_ptr<const CRobotPosesGraph > |
Definition at line 42 of file CRobotPosesGraph.h.
◆ Ptr
| using mrpt::hmtslam::CRobotPosesGraph::Ptr = std::shared_ptr< CRobotPosesGraph > |
A type for the associated smart pointer
Definition at line 42 of file CRobotPosesGraph.h.
◆ UniquePtr
| using mrpt::hmtslam::CRobotPosesGraph::UniquePtr = std::unique_ptr< CRobotPosesGraph > |
Definition at line 42 of file CRobotPosesGraph.h.
Member Function Documentation
◆ _GetBaseClass()
|
staticprotected |
◆ clone()
|
overridevirtual |
Returns a deep copy (clone) of the object, indepently of its class.
Implements mrpt::rtti::CObject.
◆ convertIntoSimplemap()
| void CRobotPosesGraph::convertIntoSimplemap | ( | mrpt::maps::CSimpleMap & | out_simplemap | ) | const |
Converts the contents of this object into a 'simplemap' (mrpt::maps::CSimpleMap) object.
Definition at line 74 of file CRobotPosesGraph.cpp.
References begin(), mrpt::maps::CSimpleMap::clear(), and mrpt::maps::CSimpleMap::insert().
◆ Create()
|
inlinestatic |
Definition at line 42 of file CRobotPosesGraph.h.
◆ CreateObject()
|
static |
◆ CreateUnique()
|
inlinestatic |
Definition at line 42 of file CRobotPosesGraph.h.
◆ duplicateGetSmartPtr()
|
inlineinherited |
Returns a copy of the object, indepently of its class, as a smart pointer (the newly created object will exist as long as any copy of this smart pointer).
Definition at line 169 of file CObject.h.
References mrpt::rtti::CObject::clone().
Referenced by mrpt::obs::CRawlog::addActions(), and mrpt::obs::CRawlog::addObservations().
◆ getClassName()
|
inlinestaticconstexpr |
Definition at line 42 of file CRobotPosesGraph.h.
◆ GetRuntimeClass()
|
overridevirtual |
Returns information about the class of an object in runtime.
Reimplemented from mrpt::serialization::CSerializable.
◆ GetRuntimeClassIdStatic()
|
static |
◆ insertIntoMetricMap()
| void CRobotPosesGraph::insertIntoMetricMap | ( | mrpt::maps::CMultiMetricMap & | metricMap | ) | const |
Insert all the observations in the map (without erasing previous contents).
Definition at line 60 of file CRobotPosesGraph.cpp.
References begin().
◆ operator delete() [1/3]
Definition at line 42 of file CRobotPosesGraph.h.
◆ operator delete() [2/3]
Definition at line 42 of file CRobotPosesGraph.h.
◆ operator delete() [3/3]
|
inlinenoexcept |
Definition at line 42 of file CRobotPosesGraph.h.
◆ operator delete[]()
Definition at line 42 of file CRobotPosesGraph.h.
◆ operator new() [1/3]
|
inline |
Definition at line 42 of file CRobotPosesGraph.h.
◆ operator new() [2/3]
|
inlinenoexcept |
Definition at line 42 of file CRobotPosesGraph.h.
◆ operator new() [3/3]
Definition at line 42 of file CRobotPosesGraph.h.
◆ operator new[]()
|
inline |
Definition at line 42 of file CRobotPosesGraph.h.
◆ serializeFrom()
|
overrideprotectedvirtual |
Pure virtual method for reading (deserializing) from an abstract archive.
Users don't call this method directly. Instead, use stream >> object;.
- Parameters
-
in The input binary stream where the object data must read from. version The version of the object stored in the stream: use this version number in your code to know how to read the incoming data.
- Exceptions
-
std::exception On any I/O error
Implements mrpt::serialization::CSerializable.
Definition at line 30 of file CRobotPosesGraph.cpp.
References mrpt::containers::clear(), MRPT_THROW_UNKNOWN_SERIALIZATION_VERSION, mrpt::hmtslam::TPoseInfo::pdf, and mrpt::hmtslam::TPoseInfo::sf.
◆ serializeGetVersion()
|
overrideprotectedvirtual |
Must return the current versioning number of the object.
Start in zero for new classes, and increments each time there is a change in the stored format.
Implements mrpt::serialization::CSerializable.
Definition at line 22 of file CRobotPosesGraph.cpp.
◆ serializeTo()
|
overrideprotectedvirtual |
Pure virtual method for writing (serializing) to an abstract archive.
Users don't call this method directly. Instead, use stream << object;.
- Exceptions
-
std::exception On any I/O error
Implements mrpt::serialization::CSerializable.
Definition at line 23 of file CRobotPosesGraph.cpp.
◆ writeToMatlab()
|
inlinevirtualinherited |
Introduces a pure virtual method responsible for writing to a mxArray Matlab object, typically a MATLAB struct whose contents are documented in each derived class.
- Returns
- A new
mxArray(caller is responsible of memory freeing) or nullptr is class does not support conversion to MATLAB.
Definition at line 70 of file CSerializable.h.
Member Data Documentation
◆ _init_CRobotPosesGraph
|
staticprotected |
Definition at line 42 of file CRobotPosesGraph.h.
◆ className
|
staticconstexpr |
Definition at line 42 of file CRobotPosesGraph.h.
◆ elements
|
inherited |
STL member.
◆ keys
|
inherited |
STL member.
◆ runtimeClassId
|
staticprotected |
Definition at line 42 of file CRobotPosesGraph.h.