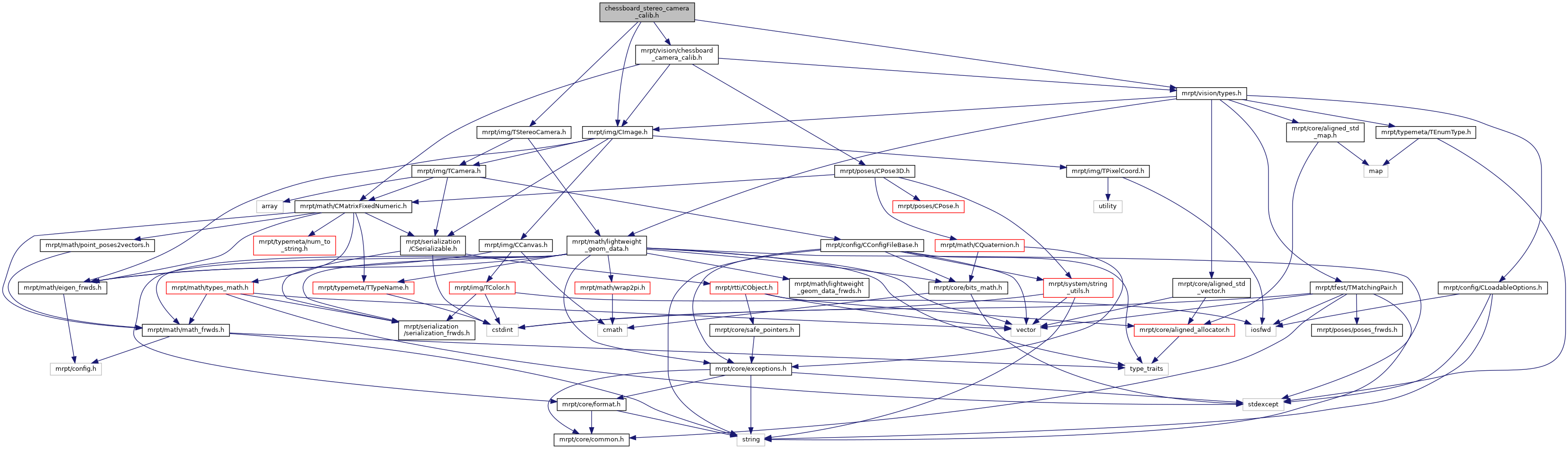
#include <mrpt/img/CImage.h>#include <mrpt/img/TStereoCamera.h>#include <mrpt/vision/types.h>#include <mrpt/vision/chessboard_camera_calib.h>
Include dependency graph for chessboard_stereo_camera_calib.h:
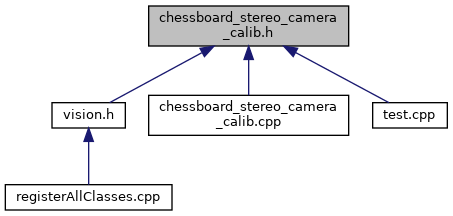
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| struct | mrpt::vision::TImageStereoCalibData |
| Data associated to each stereo image in the calibration process mrpt::vision::checkerBoardCameraCalibration (All the information can be left empty and will be filled up in the calibration method). More... | |
| struct | mrpt::vision::TImageStereoCallbackData |
| Params of the optional callback provided by the user. More... | |
| struct | mrpt::vision::TStereoCalibParams |
| Input parameters for mrpt::vision::checkerBoardStereoCalibration. More... | |
| struct | mrpt::vision::TStereoCalibResults |
| Output results for mrpt::vision::checkerBoardStereoCalibration. More... | |
Namespaces | |
| mrpt | |
| This is the global namespace for all Mobile Robot Programming Toolkit (MRPT) libraries. | |
| mrpt::vision | |
| Classes for computer vision, detectors, features, etc. | |
Typedefs | |
| using | mrpt::vision::TSteroCalibCallbackFunctor = void(*)(const TImageStereoCallbackData &d, void *user_data) |
| Prototype of optional user callback function. More... | |
| using | mrpt::vision::TCalibrationStereoImageList = std::vector< TImageStereoCalibData > |
| A list of images, used in checkerBoardStereoCalibration. More... | |
Functions | |
| bool | mrpt::vision::checkerBoardStereoCalibration (TCalibrationStereoImageList &images, const TStereoCalibParams ¶ms, TStereoCalibResults &out_results) |
| Optimize the calibration parameters of a stereo camera or a RGB+D (Kinect) camera. More... | |