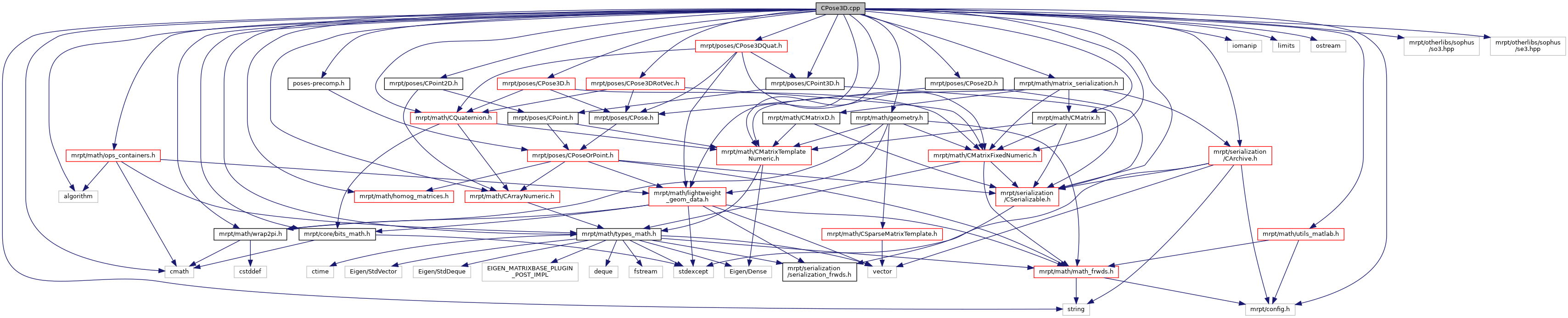
#include "poses-precomp.h"#include <mrpt/config.h>#include <mrpt/math/types_math.h>#include <mrpt/math/CMatrix.h>#include <mrpt/math/geometry.h>#include <mrpt/math/matrix_serialization.h>#include <mrpt/math/wrap2pi.h>#include <mrpt/poses/CPoint2D.h>#include <mrpt/poses/CPoint3D.h>#include <mrpt/poses/CPose2D.h>#include <mrpt/poses/CPose3D.h>#include <mrpt/poses/CPose3DQuat.h>#include <mrpt/poses/CPose3DRotVec.h>#include <mrpt/serialization/CArchive.h>#include <algorithm>#include <cmath>#include <iomanip>#include <limits>#include <ostream>#include <string>#include <mrpt/math/CArrayNumeric.h>#include <mrpt/math/CMatrixFixedNumeric.h>#include <mrpt/math/CMatrixTemplateNumeric.h>#include <mrpt/math/CQuaternion.h>#include <mrpt/math/homog_matrices.h>#include <mrpt/math/lightweight_geom_data.h>#include <mrpt/math/ops_containers.h>#include <mrpt/serialization/CSerializable.h>#include <mrpt/core/bits_math.h>#include <mrpt/math/utils_matlab.h>#include <mrpt/otherlibs/sophus/so3.hpp>#include <mrpt/otherlibs/sophus/se3.hpp>
Include dependency graph for CPose3D.cpp:
Go to the source code of this file.
Namespaces | |
| mrpt | |
| This is the global namespace for all Mobile Robot Programming Toolkit (MRPT) libraries. | |
| mrpt::poses | |
| Classes for 2D/3D geometry representation, both of single values and probability density distributions (PDFs) in many forms. | |
Functions | |
| template<class VEC3 , class MAT33 > | |
| void | mrpt::poses::deltaR (const MAT33 &R, VEC3 &v) |
| template<typename VEC3 , typename MAT3x3 , typename MAT3x9 > | |
| void | mrpt::poses::M3x9 (const VEC3 &a, const MAT3x3 &B, MAT3x9 &RES) |
| CMatrixDouble33 | mrpt::poses::ddeltaRt_dR (const CPose3D &P) |
| void | mrpt::poses::dVinvt_dR (const CPose3D &P, CMatrixFixedNumeric< double, 3, 9 > &J) |