#include "kinematics-precomp.h"#include <mrpt/kinematics/CKinematicChain.h>#include <mrpt/serialization/CArchive.h>#include <mrpt/serialization/stl_serialization.h>#include <mrpt/opengl/CSetOfObjects.h>#include <mrpt/opengl/CCylinder.h>#include <mrpt/opengl/stock_objects.h>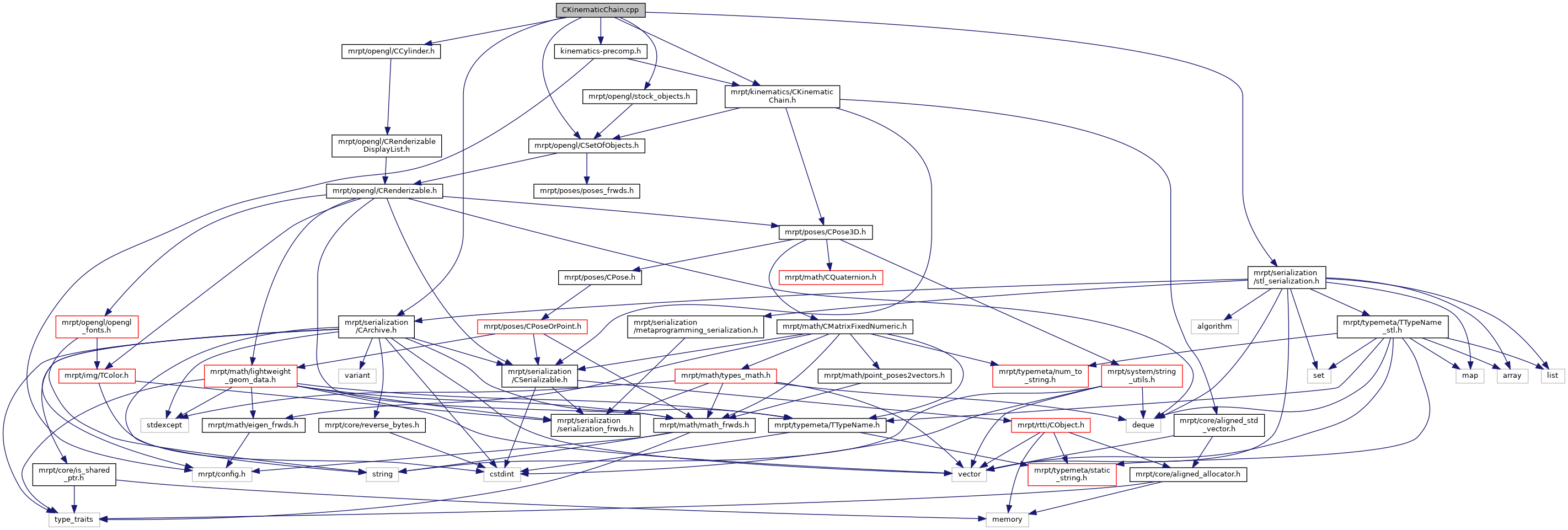
Go to the source code of this file.
Functions | |
| void | addBar_D (mrpt::opengl::CSetOfObjects::Ptr &objs, const double d) |
| void | addBar_A (mrpt::opengl::CSetOfObjects::Ptr &objs, const double a) |
Variables | |
| const float | R = 0.01f |
Function Documentation
◆ addBar_A()
| void addBar_A | ( | mrpt::opengl::CSetOfObjects::Ptr & | objs, |
| const double | a | ||
| ) |
Definition at line 150 of file CKinematicChain.cpp.
References mrpt::DEG2RAD(), and R.
Referenced by mrpt::kinematics::CKinematicChain::getAs3DObject().
◆ addBar_D()
| void addBar_D | ( | mrpt::opengl::CSetOfObjects::Ptr & | objs, |
| const double | d | ||
| ) |
Definition at line 140 of file CKinematicChain.cpp.
References R.
Referenced by mrpt::kinematics::CKinematicChain::getAs3DObject().
Variable Documentation
◆ R
| const float R = 0.01f |
Definition at line 138 of file CKinematicChain.cpp.
Referenced by mrpt::nav::CPTG_RobotShape_Circular::add_robotShape_to_setOfLines(), addBar_A(), addBar_D(), mrpt::bayes::detail::addNewLandmarks(), mrpt::vision::pnp::p3p::align(), mrpt::nav::CReactiveNavigationSystem::changeRobotCircularShapeRadius(), mrpt::nav::CReactiveNavigationSystem::checkCollisionWithLatestObstacles(), mrpt::nav::CReactiveNavigationSystem3D::checkCollisionWithLatestObstacles(), mrpt::nav::collision_free_dist_arc_circ_robot(), mrpt::nav::collision_free_dist_segment_circ_robot(), mrpt::math::TPose3D::composePoint(), mrpt::vision::pnp::ppnp::compute_pose(), mrpt::vision::pnp::rpnp::compute_pose(), mrpt::vision::pnp::posit::compute_pose(), mrpt::obs::CActionRobotMovement2D::computeFromEncoders(), mrpt::bayes::CParticleFilterCapable::computeResampling(), mrpt::vision::computeStereoRectificationMaps(), mrpt::poses::CPose3DRotVec::CPose3DRotVec(), GraphSlamLevMarqTest< my_graph_t >::create_ring_path(), createMesh(), mrpt::poses::ddeltaRt_dR(), mrpt::poses::deltaR(), mrpt::poses::dVinvt_dR(), mrpt::poses::CPose3D::exp(), mrpt::poses::CPose3D::exp_rotation(), mrpt::detectors::CFaceDetection::experimental_viewRegions(), mrpt::maps::CPointsMap::extractPoints(), mrpt::poses::CRobot2DPoseEstimator::extrapolateRobotPose(), mrpt::vision::frameJac(), Pose3DTests::func_jacob_LnT_T(), mrpt::opengl::detail::generalizedEllipsoidPoints< 3 >(), mrpt::maps::CBeacon::generateRingSOG(), mrpt::math::TPose3D::getHomogeneousMatrix(), mrpt::maps::CColouredPointsMap::getPCLPointCloudXYZRGB(), mrpt::maps::CColouredPointsMap::getPoint(), mrpt::maps::CPointsMap::getPoint(), mrpt::maps::CColouredPointsMap::getPointColor(), mrpt::opengl::CPointCloudColoured::getPointColor_fast(), mrpt::maps::CColouredPointsMap::getPointColor_fast(), mrpt::opengl::PointCloudAdapter< mrpt::opengl::CPointCloudColoured >::getPointRGBu8(), mrpt::opengl::PointCloudAdapter< mrpt::maps::CColouredPointsMap >::getPointRGBu8(), mrpt::poses::CPose2D::getRotationMatrix(), mrpt::math::TPose3D::getRotationMatrix(), IMPLEMENTS_SERIALIZABLE(), mrpt::maps::CColouredPointsMap::insertPoint(), mrpt::maps::CPointsMap::insertPoint(), mrpt::vision::CFeatureExtraction::internal_computeSpinImageDescriptors(), mrpt::maps::CBeaconMap::internal_insertObservation(), mrpt::maps::COccupancyGridMap2D::internal_insertObservation(), mrpt::nav::CPTG_DiffDrive_C::inverseMap_WS2TP(), mrpt::vision::pnp::CPnP::lhm(), mrpt::poses::CPose3D::ln_jacob(), mrpt::poses::CPose3D::ln_rot_jacob(), mrpt::poses::CPose3D::ln_rotation(), mrpt::math::multiply_HCHt(), multiply_HCHt(), mrpt::math::multiply_HtCH(), multiply_HtCH(), myGeneralDFT(), mrpt::slam::CRangeBearingKFSLAM2D::OnGetObservationsAndDataAssociation(), mrpt::slam::CRangeBearingKFSLAM::OnGetObservationsAndDataAssociation(), mrpt::vision::pnp::CPnP::p3p(), mrpt::vision::pnp::posit::POS(), mrpt::vision::pnp::CPnP::posit(), mrpt::vision::pnp::CPnP::ppnp(), mrpt::nav::CPTG_DiffDrive_CCS::PTG_IsIntoDomain(), mrpt::nav::CPTG_DiffDrive_CS::PTG_IsIntoDomain(), mrpt::nav::CPTG_DiffDrive_CC::PTG_IsIntoDomain(), mrpt::nav::CPTG_DiffDrive_CC::ptgDiffDriveSteeringFunction(), mrpt::nav::CPTG_DiffDrive_CCS::ptgDiffDriveSteeringFunction(), mrpt::nav::CPTG_DiffDrive_CS::ptgDiffDriveSteeringFunction(), mrpt::opengl::CPointCloudColoured::push_back(), mrpt::serialization::CArchive::ReadVariant_helper(), mrpt::kinematics::CKinematicChain::recomputeAllPoses(), mrpt::opengl::CColorBar::render_dl(), mrpt::opengl::CVectorField3D::render_dl(), mrpt::nav::PlannerTPS_VirtualBase::renderMoveTree(), mrpt::opengl::gl_utils::renderSetOfObjects(), mrpt::math::TTwist3D::rotate(), mrpt::vision::pnp::CPnP::rpnp(), mrpt::slam::CRejectionSamplingRangeOnlyLocalization::RS_drawFromProposal(), mrpt::bayes::CKalmanFilterCapable< 7, 3, 3, 7 >::runOneKalmanIteration(), mrpt::maps::saveLASFile(), mrpt::opengl::CRenderizable::setColor(), mrpt::opengl::CRenderizableDisplayList::setColor_u8(), mrpt::opengl::CRenderizable::setColor_u8(), mrpt::vision::CStereoRectifyMap::setFromCamParams(), mrpt::opengl::CPlanarLaserScan::setLineColor(), mrpt::slam::CRejectionSamplingRangeOnlyLocalization::setParams(), mrpt::maps::CColouredPointsMap::setPoint(), mrpt::maps::CPointsMap::setPoint(), mrpt::opengl::CVectorField2D::setPointColor(), mrpt::opengl::CVectorField3D::setPointColor(), mrpt::maps::CColouredPointsMap::setPointColor(), mrpt::opengl::CPointCloudColoured::setPointColor_fast(), mrpt::maps::CColouredPointsMap::setPointColor_fast(), mrpt::opengl::CPlanarLaserScan::setPointsColor(), mrpt::opengl::CPlanarLaserScan::setSurfaceColor(), mrpt::opengl::CVectorField2D::setVectorFieldColor(), mrpt::opengl::CVectorField3D::setVectorFieldColor(), mrpt::math::TPose3D::SO3_to_yaw_pitch_roll(), mrpt::vision::pnp::p3p::solve(), solve_deg3(), solve_deg4(), TEST(), and mrpt::nav::CPTG_Holo_Blend::updateTPObstacleSingle().