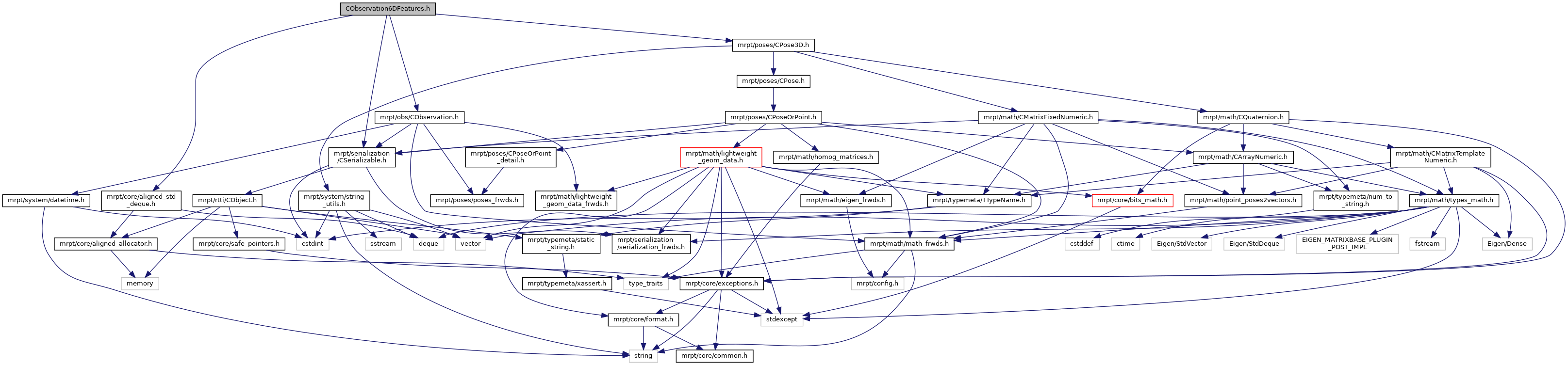
#include <mrpt/serialization/CSerializable.h>#include <mrpt/obs/CObservation.h>#include <mrpt/poses/CPose3D.h>#include <mrpt/core/aligned_std_deque.h>
Include dependency graph for CObservation6DFeatures.h:
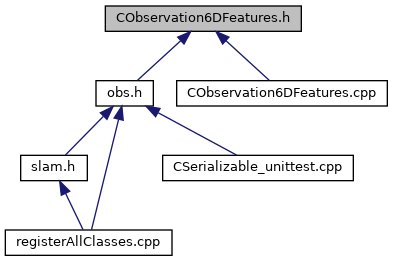
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| class | mrpt::obs::CObservation6DFeatures |
| An observation of one or more "features" or "objects", possibly identified with a unique ID, whose relative SE(3) pose is observed with respect to the sensor. More... | |
| struct | mrpt::obs::CObservation6DFeatures::TMeasurement |
| Each one of the measurements. More... | |
Namespaces | |
| mrpt | |
| This is the global namespace for all Mobile Robot Programming Toolkit (MRPT) libraries. | |
| mrpt::obs | |
| This namespace contains representation of robot actions and observations. | |