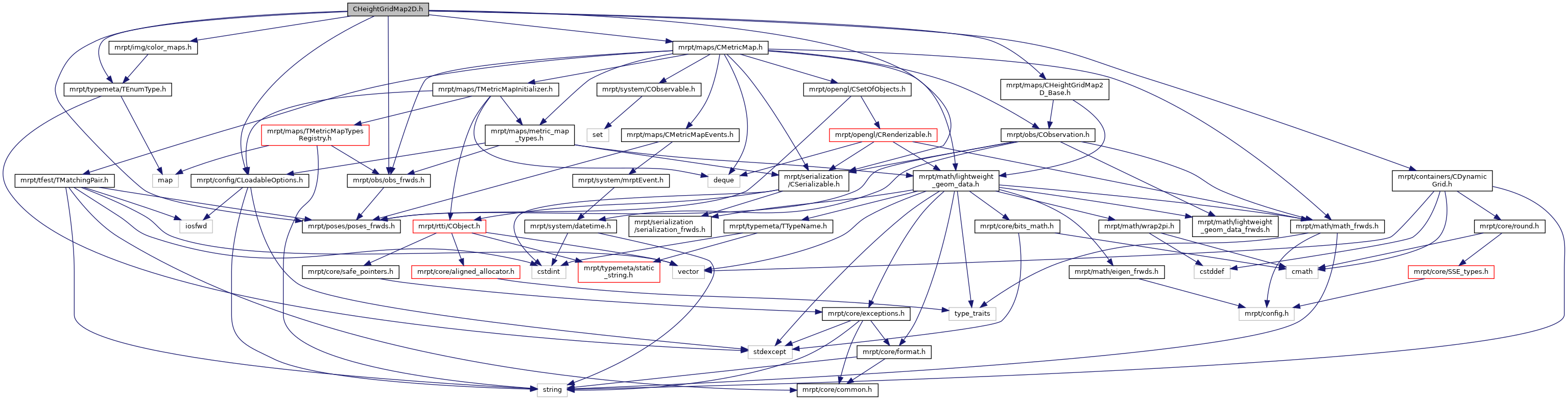
#include <mrpt/maps/CHeightGridMap2D_Base.h>#include <mrpt/maps/CMetricMap.h>#include <mrpt/containers/CDynamicGrid.h>#include <mrpt/serialization/CSerializable.h>#include <mrpt/config/CLoadableOptions.h>#include <mrpt/img/color_maps.h>#include <mrpt/typemeta/TEnumType.h>#include <mrpt/poses/poses_frwds.h>#include <mrpt/obs/obs_frwds.h>
Include dependency graph for CHeightGridMap2D.h:
This graph shows which files directly or indirectly include this file:

Go to the source code of this file.
Classes | |
| struct | mrpt::maps::THeightGridmapCell |
| The contents of each cell in a CHeightGridMap2D map. More... | |
| class | mrpt::maps::CHeightGridMap2D |
| Digital Elevation Model (DEM), a mesh or grid representation of a surface which keeps the estimated height for each (x,y) location. More... | |
| struct | mrpt::maps::CHeightGridMap2D::TInsertionOptions |
| Parameters related with inserting observations into the map. More... | |
| struct | mrpt::maps::CHeightGridMap2D::TMapDefinitionBase |
| struct | mrpt::maps::CHeightGridMap2D::TMapDefinition |
Namespaces | |
| mrpt | |
| This is the global namespace for all Mobile Robot Programming Toolkit (MRPT) libraries. | |
| mrpt::maps | |
| mrpt::global_settings | |
| Global variables to change the run-time behaviour of some MRPT classes within mrpt-base. | |
Functions | |
| void | mrpt::global_settings::HEIGHTGRIDMAP_EXPORT3D_AS_MESH (bool value) |
| If set to true (default), mrpt::maps::CHeightGridMap2D will be exported as a opengl::CMesh, otherwise, as a opengl::CPointCloudColoured Affects to: More... | |
| bool | mrpt::global_settings::HEIGHTGRIDMAP_EXPORT3D_AS_MESH () |
| MRPT_FILL_ENUM_MEMBER (maps::CHeightGridMap2D::TMapRepresentation, mrSimpleAverage) | |
Function Documentation
◆ MRPT_FILL_ENUM_MEMBER()
| MRPT_FILL_ENUM_MEMBER | ( | maps::CHeightGridMap2D::TMapRepresentation | , |
| mrSimpleAverage | |||
| ) |