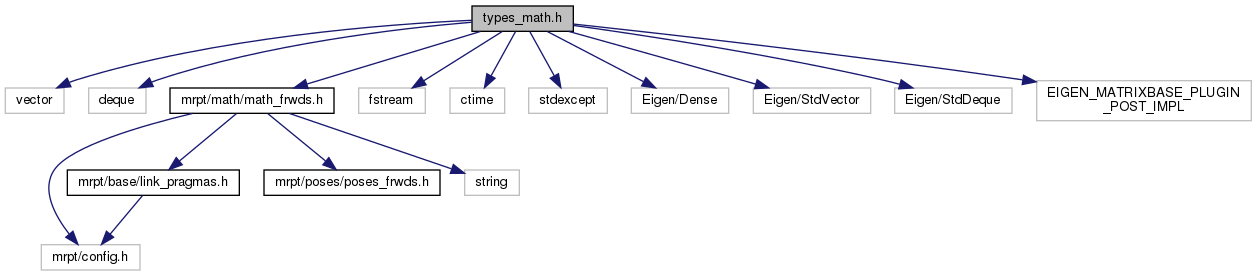
#include <vector>#include <deque>#include <mrpt/math/math_frwds.h>#include <fstream>#include <ctime>#include <stdexcept>#include <Eigen/Dense>#include <Eigen/StdVector>#include <Eigen/StdDeque>#include <EIGEN_MATRIXBASE_PLUGIN_POST_IMPL>
Include dependency graph for types_math.h:
This graph shows which files directly or indirectly include this file:

Go to the source code of this file.
Classes | |
| class | mrpt::math::dynamic_vector< T > |
| Column vector, like Eigen::MatrixX*, but automatically initialized to zeros since construction. More... | |
Namespaces | |
| mrpt | |
| This is the global namespace for all Mobile Robot Programming Toolkit (MRPT) libraries. | |
| mrpt::math | |
| This base provides a set of functions for maths stuff. | |
| mrpt::utils | |
| Classes for serialization, sockets, ini-file manipulation, streams, list of properties-values, timewatch, extensions to STL. | |
Macros | |
| #define | EIGEN_USE_NEW_STDVECTOR |
| #define | MRPT_EIGEN_DERIVED_CLASS_CTOR_OPERATOR_EQUAL(_CLASS_) |
Macro Definition Documentation
◆ EIGEN_USE_NEW_STDVECTOR
| #define EIGEN_USE_NEW_STDVECTOR |
Definition at line 29 of file types_math.h.
◆ MRPT_EIGEN_DERIVED_CLASS_CTOR_OPERATOR_EQUAL
| #define MRPT_EIGEN_DERIVED_CLASS_CTOR_OPERATOR_EQUAL | ( | _CLASS_ | ) |
Value:
/*! Assignment operator from any other Eigen class */ \
template<typename OtherDerived> \
inline mrpt_autotype & operator= (const Eigen::MatrixBase <OtherDerived>& other) { \
Base::operator=(other); \
return *this; \
} \
/*! Constructor from any other Eigen class */ \
template<typename OtherDerived> \
inline _CLASS_(const Eigen::MatrixBase <OtherDerived>& other) : Base(other.template cast<typename Base::Scalar>()) { } \
Definition at line 47 of file types_math.h.