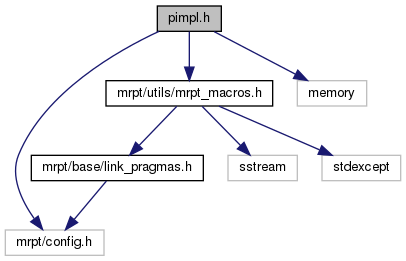

Go to the source code of this file.
Classes | |
| struct | mrpt::utils::pimpl< T > |
| Pointer to IMPLementation auxiliary structure to make raw pointers movable, copiable and automatically deleted. More... | |
Namespaces | |
| mrpt | |
| This is the global namespace for all Mobile Robot Programming Toolkit (MRPT) libraries. | |
| mrpt::utils | |
| Classes for serialization, sockets, ini-file manipulation, streams, list of properties-values, timewatch, extensions to STL. | |
Macros | |
| #define | PIMPL_FORWARD_DECLARATION(_TYPE) _TYPE |
| #define | PIMPL_DECLARE_TYPE(_TYPE, _VAR_NAME) mrpt::utils::pimpl<_TYPE> _VAR_NAME |
| #define | PIMPL_IMPLEMENT(_TYPE) |
| #define | PIMPL_CONSTRUCT(_TYPE, _VAR_NAME) _VAR_NAME.ptr.reset( new _TYPE()) |
| #define | PIMPL_GET_PTR(_TYPE, _VAR_NAME) _VAR_NAME.ptr.get() |
| #define | PIMPL_GET_REF(_TYPE, _VAR_NAME) (*_VAR_NAME.ptr.get()) |
| #define | PIMPL_GET_CONSTREF(_TYPE, _VAR_NAME) (*_VAR_NAME.ptr.get()) |
Macro Definition Documentation
◆ PIMPL_CONSTRUCT
| #define PIMPL_CONSTRUCT | ( | _TYPE, | |
| _VAR_NAME | |||
| ) | _VAR_NAME.ptr.reset( new _TYPE()) |
Definition at line 72 of file pimpl.h.
Referenced by mrpt::math::CRuntimeCompiledExpression::CRuntimeCompiledExpression().
◆ PIMPL_DECLARE_TYPE
| #define PIMPL_DECLARE_TYPE | ( | _TYPE, | |
| _VAR_NAME | |||
| ) | mrpt::utils::pimpl<_TYPE> _VAR_NAME |
◆ PIMPL_FORWARD_DECLARATION
◆ PIMPL_GET_CONSTREF
| #define PIMPL_GET_CONSTREF | ( | _TYPE, | |
| _VAR_NAME | |||
| ) | (*_VAR_NAME.ptr.get()) |
Definition at line 76 of file pimpl.h.
Referenced by mrpt::math::CRuntimeCompiledExpression::eval(), mrpt::math::CRuntimeCompiledExpression::get_raw_exprtk_expr(), mrpt::maps::COctoMap::getMetricMax(), mrpt::maps::CColouredOctoMap::getMetricMax(), mrpt::maps::COctoMap::getMetricMin(), mrpt::maps::CColouredOctoMap::getMetricMin(), mrpt::maps::COctoMap::getMetricSize(), mrpt::maps::CColouredOctoMap::getMetricSize(), mrpt::maps::COctoMap::getNumLeafNodes(), mrpt::maps::CColouredOctoMap::getNumLeafNodes(), mrpt::maps::COctoMap::getResolution(), mrpt::maps::CColouredOctoMap::getResolution(), mrpt::maps::COctoMap::getTreeDepth(), mrpt::maps::CColouredOctoMap::getTreeDepth(), mrpt::maps::COctoMap::isPointWithinOctoMap(), mrpt::maps::CColouredOctoMap::isPointWithinOctoMap(), mrpt::maps::COctoMap::memoryFullGrid(), mrpt::maps::CColouredOctoMap::memoryFullGrid(), mrpt::maps::COctoMap::memoryUsage(), mrpt::maps::CColouredOctoMap::memoryUsage(), mrpt::maps::COctoMap::memoryUsageNode(), mrpt::maps::CColouredOctoMap::memoryUsageNode(), mrpt::maps::COctoMap::size(), and mrpt::maps::CColouredOctoMap::size().
◆ PIMPL_GET_PTR
| #define PIMPL_GET_PTR | ( | _TYPE, | |
| _VAR_NAME | |||
| ) | _VAR_NAME.ptr.get() |
Definition at line 74 of file pimpl.h.
Referenced by mrpt::maps::COctoMapBase< octomap::OcTree, octomap::OcTreeNode >::saveMetricMapRepresentationToFile().
◆ PIMPL_GET_REF
| #define PIMPL_GET_REF | ( | _TYPE, | |
| _VAR_NAME | |||
| ) | (*_VAR_NAME.ptr.get()) |
Definition at line 75 of file pimpl.h.
Referenced by mrpt::maps::COctoMap::calcNumNodes(), mrpt::maps::CColouredOctoMap::calcNumNodes(), mrpt::maps::COctoMapBase< octomap::OcTree, octomap::OcTreeNode >::castRay(), mrpt::math::CRuntimeCompiledExpression::compile(), mrpt::math::CRuntimeCompiledExpression::get_raw_exprtk_expr(), mrpt::maps::COctoMap::getAsOctoMapVoxels(), mrpt::maps::CColouredOctoMap::getAsOctoMapVoxels(), mrpt::maps::COctoMap::getClampingThresMax(), mrpt::maps::CColouredOctoMap::getClampingThresMax(), mrpt::maps::COctoMap::getClampingThresMaxLog(), mrpt::maps::CColouredOctoMap::getClampingThresMaxLog(), mrpt::maps::COctoMap::getClampingThresMin(), mrpt::maps::CColouredOctoMap::getClampingThresMin(), mrpt::maps::COctoMap::getClampingThresMinLog(), mrpt::maps::CColouredOctoMap::getClampingThresMinLog(), mrpt::maps::COctoMap::getMetricMax(), mrpt::maps::CColouredOctoMap::getMetricMax(), mrpt::maps::COctoMap::getMetricMin(), mrpt::maps::CColouredOctoMap::getMetricMin(), mrpt::maps::COctoMap::getMetricSize(), mrpt::maps::CColouredOctoMap::getMetricSize(), mrpt::maps::COctoMap::getOccupancyThres(), mrpt::maps::CColouredOctoMap::getOccupancyThres(), mrpt::maps::COctoMap::getOccupancyThresLog(), mrpt::maps::CColouredOctoMap::getOccupancyThresLog(), mrpt::maps::CColouredOctoMap::getPointColour(), mrpt::maps::COctoMapBase< octomap::OcTree, octomap::OcTreeNode >::getPointOccupancy(), mrpt::maps::COctoMap::getProbHit(), mrpt::maps::CColouredOctoMap::getProbHit(), mrpt::maps::COctoMap::getProbHitLog(), mrpt::maps::CColouredOctoMap::getProbHitLog(), mrpt::maps::COctoMap::getProbMiss(), mrpt::maps::CColouredOctoMap::getProbMiss(), mrpt::maps::COctoMap::getProbMissLog(), mrpt::maps::CColouredOctoMap::getProbMissLog(), mrpt::maps::COctoMapBase< octomap::OcTree, octomap::OcTreeNode >::insertPointCloud(), mrpt::maps::COctoMap::insertRay(), mrpt::maps::CColouredOctoMap::insertRay(), mrpt::maps::COctoMap::internal_clear(), mrpt::maps::CColouredOctoMap::internal_clear(), mrpt::maps::COctoMapBase< octomap::OcTree, octomap::OcTreeNode >::internal_computeObservationLikelihood(), mrpt::maps::COctoMap::internal_insertObservation(), mrpt::maps::CColouredOctoMap::internal_insertObservation(), mrpt::math::CRuntimeCompiledExpression::ExprVerbose::process(), mrpt::maps::CColouredOctoMap::readFromStream(), mrpt::maps::COctoMap::readFromStream(), mrpt::math::CRuntimeCompiledExpression::register_symbol_table(), mrpt::maps::COctoMap::setClampingThresMax(), mrpt::maps::CColouredOctoMap::setClampingThresMax(), mrpt::maps::COctoMap::setClampingThresMin(), mrpt::maps::CColouredOctoMap::setClampingThresMin(), mrpt::maps::COctoMap::setOccupancyThres(), mrpt::maps::CColouredOctoMap::setOccupancyThres(), mrpt::maps::COctoMap::setProbHit(), mrpt::maps::CColouredOctoMap::setProbHit(), mrpt::maps::COctoMap::setProbMiss(), mrpt::maps::CColouredOctoMap::setProbMiss(), mrpt::maps::COctoMap::updateVoxel(), mrpt::maps::CColouredOctoMap::updateVoxel(), mrpt::maps::CColouredOctoMap::updateVoxelColour(), mrpt::maps::COctoMap::volume(), mrpt::maps::CColouredOctoMap::volume(), mrpt::maps::CColouredOctoMap::writeToStream(), and mrpt::maps::COctoMap::writeToStream().
◆ PIMPL_IMPLEMENT
| #define PIMPL_IMPLEMENT | ( | _TYPE | ) |