#include <mrpt/opengl/CGridPlaneXY.h>#include <mrpt/opengl/CPointCloud.h>#include <mrpt/opengl/CSetOfObjects.h>#include <mrpt/opengl/CSimpleLine.h>#include <mrpt/opengl/CSetOfLines.h>#include <mrpt/opengl/stock_objects.h>
Include dependency graph for graph_tools_impl.h:

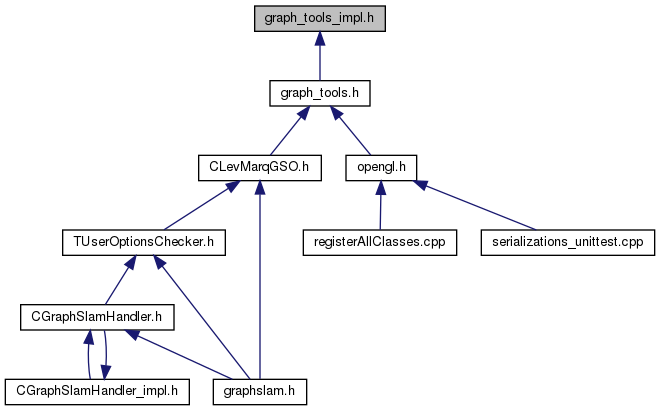
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Namespaces | |
| mrpt | |
| This is the global namespace for all Mobile Robot Programming Toolkit (MRPT) libraries. | |
| mrpt::opengl | |
| The namespace for 3D scene representation and rendering. | |
| mrpt::opengl::graph_tools | |
| Tool functions for graphs of pose constraints. | |
Functions | |
Tool functions for graphs of pose constraints | |
| template<class GRAPH_T > | |
| CSetOfObjectsPtr | mrpt::opengl::graph_tools::graph_visualize (const GRAPH_T &g, const mrpt::utils::TParametersDouble &extra_params=mrpt::utils::TParametersDouble()) |
| Returns an opengl objects representation of an arbitrary graph, as a network of 3D pose frames. More... | |