Detailed Description
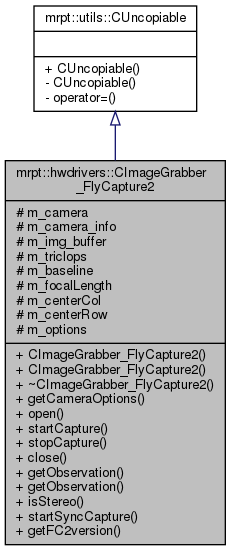
A wrapper for Point Gray Research (PGR) FlyCapture2 API for capturing images from Firewire, USB3 or GigaE cameras and stereo cameras.
This class is only available when compiling MRPT with "MRPT_HAS_PGR_FLYCAPTURE2".
- See also
- See the most generic camera grabber in MRPT: mrpt::hwdrivers::CCameraSensor
- See example code in [samples]/captureVideoFlyCapture2 and [samples]/captureVideoFlyCapture2_stereo.
Definition at line 131 of file CImageGrabber_FlyCapture2.h.
#include <mrpt/hwdrivers/CImageGrabber_FlyCapture2.h>
Public Member Functions | |
| CImageGrabber_FlyCapture2 () | |
| Constructor that does not open a camera. More... | |
| CImageGrabber_FlyCapture2 (const TCaptureOptions_FlyCapture2 &options) | |
| Constructor: tries to open the camera with the given options. More... | |
| virtual | ~CImageGrabber_FlyCapture2 () |
| Destructor. More... | |
| const TCaptureOptions_FlyCapture2 & | getCameraOptions () const |
| Returns the current settings of the camera. More... | |
| void | open (const TCaptureOptions_FlyCapture2 &options, const bool startCapture=true) |
| Tries to open the camera with the given options, and starts capture. More... | |
| void | startCapture () |
| Start the actual image capture of the camera. More... | |
| void | stopCapture () |
| Stop capture. More... | |
| void | close () |
| Stop capture and closes the opened camera, if any. More... | |
| bool | getObservation (mrpt::obs::CObservationImage &out_observation) |
| Grab mono image from the camera. More... | |
| bool | getObservation (mrpt::obs::CObservationStereoImages &out_observation) |
| Grab stereo image from the camera. More... | |
| bool | isStereo () |
| Returns if current configuration is stereo or not. More... | |
Static Public Member Functions | |
| static void | startSyncCapture (int numCameras, const CImageGrabber_FlyCapture2 **cameras_array) |
| Starts a synchronous capture of several cameras, which must have been already opened. More... | |
| static std::string | getFC2version () |
| Returns the PGR FlyCapture2 library version. More... | |
Protected Attributes | |
| void * | m_camera |
| Opaque pointer to the FlyCapture2::Camera object. NULL if no camera is grabbing. More... | |
| void * | m_camera_info |
| Opaque pointer to the FlyCapture2::CameraInfo object. NULL if no camera is grabbing. More... | |
| void * | m_img_buffer |
| Opaque pointer to the FlyCapture2::Image, used as a temporary buffer and to avoid mem alloc/reallocs. More... | |
| void * | m_triclops |
| Opaque pointer to the TriclopsContext objetc. NULL if no context is active. More... | |
| float | m_baseline |
| Camera baseline (only for stereo cameras) More... | |
| float | m_focalLength |
| Camera focal length. More... | |
| float | m_centerCol |
| float | m_centerRow |
| Camera center coordinates. More... | |
| TCaptureOptions_FlyCapture2 | m_options |
| Camera options. More... | |
Constructor & Destructor Documentation
◆ CImageGrabber_FlyCapture2() [1/2]
| CImageGrabber_FlyCapture2::CImageGrabber_FlyCapture2 | ( | ) |
Constructor that does not open a camera.
Default constructor.
- See also
- open()
Definition at line 227 of file CImageGrabber_FlyCapture2.cpp.
References m_img_buffer.
◆ CImageGrabber_FlyCapture2() [2/2]
| CImageGrabber_FlyCapture2::CImageGrabber_FlyCapture2 | ( | const TCaptureOptions_FlyCapture2 & | options | ) |
Constructor: tries to open the camera with the given options.
Constructor + open.
Raises an exception on error.
- See also
- open()
Definition at line 239 of file CImageGrabber_FlyCapture2.cpp.
References m_img_buffer, and open().
◆ ~CImageGrabber_FlyCapture2()
|
virtual |
Destructor.
Definition at line 252 of file CImageGrabber_FlyCapture2.cpp.
References close(), FC2_BUF_IMG, and m_img_buffer.
Member Function Documentation
◆ close()
| void CImageGrabber_FlyCapture2::close | ( | ) |
Stop capture and closes the opened camera, if any.
Closes the opened camera, if any.
Called automatically on object destruction.
Definition at line 588 of file CImageGrabber_FlyCapture2.cpp.
References FC2_CAM, FC2_CAM_INFO, m_camera, m_camera_info, m_triclops, stopCapture(), THROW_EXCEPTION, and TRI_CONTEXT.
Referenced by open(), and ~CImageGrabber_FlyCapture2().
◆ getCameraOptions()
|
inline |
Returns the current settings of the camera.
Definition at line 157 of file CImageGrabber_FlyCapture2.h.
◆ getFC2version()
|
static |
Returns the PGR FlyCapture2 library version.
Definition at line 619 of file CImageGrabber_FlyCapture2.cpp.
References mrpt::mrpt::format(), and THROW_EXCEPTION.
Referenced by open().
◆ getObservation() [1/2]
| bool CImageGrabber_FlyCapture2::getObservation | ( | mrpt::obs::CObservationImage & | out_observation | ) |
Grab mono image from the camera.
This method blocks until the next frame is captured.
- Returns
- false on any error.
Definition at line 635 of file CImageGrabber_FlyCapture2.cpp.
References CHECK_FC2_ERROR, mrpt::obs::gnss::error, FC2_BUF_IMG, FC2_CAM, mrpt::obs::CObservationImage::image, mrpt::utils::CImage::loadFromMemoryBuffer(), m_camera, mrpt::system::now(), THROW_EXCEPTION, mrpt::system::time_tToTimestamp(), and mrpt::obs::CObservation::timestamp.
◆ getObservation() [2/2]
| bool CImageGrabber_FlyCapture2::getObservation | ( | mrpt::obs::CObservationStereoImages & | out_observation | ) |
Grab stereo image from the camera.
This method blocks until the next frame is captured.
- Returns
- false on any error.
Definition at line 686 of file CImageGrabber_FlyCapture2.cpp.
References mrpt::obs::CObservationStereoImages::cameraPose, CHECK_FC2_ERROR, CHECK_TRICLOPS_ERROR, FC2_CAM, mrpt::hwdrivers::TCaptureOptions_FlyCapture2::get_rectified, mrpt::obs::CObservationStereoImages::imageLeft, mrpt::obs::CObservationStereoImages::imageRight, mrpt::obs::CObservationStereoImages::leftCamera, m_baseline, m_camera, m_centerCol, m_centerRow, m_focalLength, m_options, mrpt::system::os::memcpy(), mrpt::system::now(), mrpt::poses::CPose3DQuat::quat(), mrpt::math::CQuaternion< T >::r(), mrpt::obs::CObservationStereoImages::rightCamera, mrpt::obs::CObservationStereoImages::rightCameraPose, mrpt::utils::CImage::setFromIplImage(), mrpt::utils::TCamera::setIntrinsicParamsFromValues(), THROW_EXCEPTION, mrpt::system::time_tToTimestamp(), mrpt::obs::CObservation::timestamp, TRI_CONTEXT, mrpt::math::CQuaternion< T >::x(), mrpt::poses::CPoseOrPoint< DERIVEDCLASS >::x(), mrpt::math::CQuaternion< T >::y(), mrpt::poses::CPoseOrPoint< DERIVEDCLASS >::y(), and mrpt::math::CQuaternion< T >::z().
◆ isStereo()
|
inline |
Returns if current configuration is stereo or not.
Definition at line 194 of file CImageGrabber_FlyCapture2.h.
References mrpt::hwdrivers::TCaptureOptions_FlyCapture2::stereo_mode.
◆ open()
| void CImageGrabber_FlyCapture2::open | ( | const TCaptureOptions_FlyCapture2 & | options, |
| const bool | startCapture = true |
||
| ) |
Tries to open the camera with the given options, and starts capture.
Tries to open the camera with the given options.
Raises an exception on error.
- Parameters
-
[in] startCapture If set to false, the camera is only opened and configured, but a posterior call to startCapture() is required to start grabbing images.
- See also
- close(), startCapture()
Raises an exception on error.
- See also
- close()
Definition at line 262 of file CImageGrabber_FlyCapture2.cpp.
References mrpt::hwdrivers::TCaptureOptions_FlyCapture2::autoexposure_abs, mrpt::hwdrivers::TCaptureOptions_FlyCapture2::autoexposure_auto, mrpt::hwdrivers::TCaptureOptions_FlyCapture2::autoexposure_EV, mrpt::hwdrivers::TCaptureOptions_FlyCapture2::autoexposure_onOff, mrpt::hwdrivers::TCaptureOptions_FlyCapture2::camera_guid, mrpt::hwdrivers::TCaptureOptions_FlyCapture2::camera_index, CHECK_FC2_ERROR, CHECK_TRICLOPS_ERROR, close(), mrpt::obs::gnss::error, FC2_CAM, FC2_CAM_INFO, mrpt::mrpt::format(), mrpt::hwdrivers::TCaptureOptions_FlyCapture2::framerate, mrpt::hwdrivers::TCaptureOptions_FlyCapture2::gain_abs, mrpt::hwdrivers::TCaptureOptions_FlyCapture2::gain_auto, mrpt::hwdrivers::TCaptureOptions_FlyCapture2::gain_dB, getFC2version(), mrpt::hwdrivers::TCaptureOptions_FlyCapture2::grabmode, mrpt::hwdrivers::TCaptureOptions_FlyCapture2::grabTimeout, m_baseline, m_camera, m_camera_info, m_centerCol, m_centerRow, m_focalLength, m_options, m_triclops, mrpt::hwdrivers::TCaptureOptions_FlyCapture2::numBuffers, mrpt::hwdrivers::TCaptureOptions_FlyCapture2::open_by_guid, mrpt::hwdrivers::TCaptureOptions_FlyCapture2::rect_height, mrpt::hwdrivers::TCaptureOptions_FlyCapture2::rect_width, mrpt::hwdrivers::TCaptureOptions_FlyCapture2::shutter_abs, mrpt::hwdrivers::TCaptureOptions_FlyCapture2::shutter_auto, mrpt::hwdrivers::TCaptureOptions_FlyCapture2::shutter_time_ms, startCapture(), mrpt::hwdrivers::TCaptureOptions_FlyCapture2::stereo_mode, mrpt::hwdrivers::TCaptureOptions_FlyCapture2::strobe_delay, mrpt::hwdrivers::TCaptureOptions_FlyCapture2::strobe_duration, mrpt::hwdrivers::TCaptureOptions_FlyCapture2::strobe_enabled, mrpt::hwdrivers::TCaptureOptions_FlyCapture2::strobe_polarity, mrpt::hwdrivers::TCaptureOptions_FlyCapture2::strobe_source, THROW_EXCEPTION, TRI_CONTEXT, mrpt::hwdrivers::TCaptureOptions_FlyCapture2::trigger_enabled, mrpt::hwdrivers::TCaptureOptions_FlyCapture2::trigger_mode, mrpt::hwdrivers::TCaptureOptions_FlyCapture2::trigger_polarity, mrpt::hwdrivers::TCaptureOptions_FlyCapture2::trigger_source, and mrpt::hwdrivers::TCaptureOptions_FlyCapture2::videomode.
Referenced by CImageGrabber_FlyCapture2().
◆ startCapture()
| void CImageGrabber_FlyCapture2::startCapture | ( | ) |
Start the actual image capture of the camera.
Must be called after open(), only when "startCapture" was set to false.
- See also
- startSyncCapture
Must be called after open(), only when "startCapture" was set to false.
Definition at line 530 of file CImageGrabber_FlyCapture2.cpp.
References CHECK_FC2_ERROR, mrpt::obs::gnss::error, FC2_CAM, m_camera, and THROW_EXCEPTION.
Referenced by open().
◆ startSyncCapture()
|
static |
Starts a synchronous capture of several cameras, which must have been already opened.
NOTE: This method only works with Firewire cameras, not with USB3 or GigaE ones (as confirmed by PGR support service).
- See also
- startCapture
Definition at line 544 of file CImageGrabber_FlyCapture2.cpp.
References CHECK_FC2_ERROR, mrpt::obs::gnss::error, THROW_EXCEPTION, and THROW_EXCEPTION_FMT.
Referenced by mrpt::hwdrivers::CCameraSensor::initialize().
◆ stopCapture()
| void CImageGrabber_FlyCapture2::stopCapture | ( | ) |
Stop capture.
Definition at line 570 of file CImageGrabber_FlyCapture2.cpp.
References CHECK_FC2_ERROR, mrpt::obs::gnss::error, FC2_CAM, m_camera, and THROW_EXCEPTION.
Referenced by close().
Member Data Documentation
◆ m_baseline
|
protected |
Camera baseline (only for stereo cameras)
Definition at line 140 of file CImageGrabber_FlyCapture2.h.
Referenced by getObservation(), and open().
◆ m_camera
|
protected |
Opaque pointer to the FlyCapture2::Camera object. NULL if no camera is grabbing.
Definition at line 134 of file CImageGrabber_FlyCapture2.h.
Referenced by close(), getObservation(), open(), startCapture(), and stopCapture().
◆ m_camera_info
|
protected |
Opaque pointer to the FlyCapture2::CameraInfo object. NULL if no camera is grabbing.
Definition at line 135 of file CImageGrabber_FlyCapture2.h.
◆ m_centerCol
|
protected |
Definition at line 142 of file CImageGrabber_FlyCapture2.h.
Referenced by getObservation(), and open().
◆ m_centerRow
|
protected |
Camera center coordinates.
Definition at line 142 of file CImageGrabber_FlyCapture2.h.
Referenced by getObservation(), and open().
◆ m_focalLength
|
protected |
Camera focal length.
Definition at line 141 of file CImageGrabber_FlyCapture2.h.
Referenced by getObservation(), and open().
◆ m_img_buffer
|
protected |
Opaque pointer to the FlyCapture2::Image, used as a temporary buffer and to avoid mem alloc/reallocs.
Definition at line 136 of file CImageGrabber_FlyCapture2.h.
Referenced by CImageGrabber_FlyCapture2(), and ~CImageGrabber_FlyCapture2().
◆ m_options
|
protected |
Camera options.
Definition at line 144 of file CImageGrabber_FlyCapture2.h.
Referenced by getObservation(), and open().
◆ m_triclops
|
protected |
Opaque pointer to the TriclopsContext objetc. NULL if no context is active.
Definition at line 137 of file CImageGrabber_FlyCapture2.h.