graph_slam_levmarq_unittest.cpp File Reference
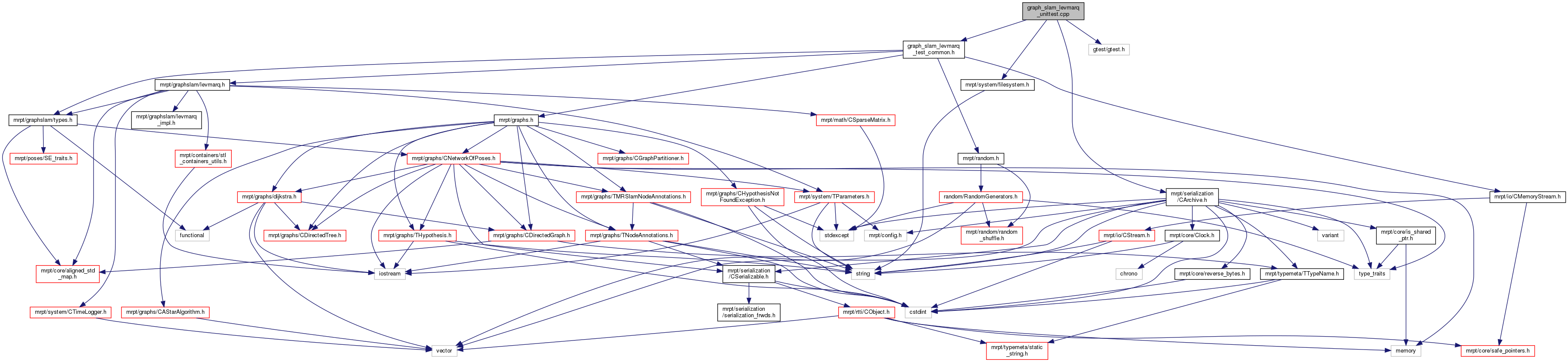
#include "graph_slam_levmarq_test_common.h"#include <gtest/gtest.h>#include <mrpt/serialization/CArchive.h>#include <mrpt/system/filesystem.h>
Include dependency graph for graph_slam_levmarq_unittest.cpp:
Go to the source code of this file.
Classes | |
| class | GraphTester< my_graph_t > |
Namespaces | |
| mrpt | |
| This is the global namespace for all Mobile Robot Programming Toolkit (MRPT) libraries. | |
Macros | |
| #define | GRAPHS_TESTS(_TYPE) |
Typedefs | |
| using | in_out_filenames = std::set< std::tuple< std::string, std::string > > |
| using | GraphTester2D = GraphTester< CNetworkOfPoses2D > |
| using | GraphTester3D = GraphTester< CNetworkOfPoses3D > |
| using | GraphTester2DInf = GraphTester< CNetworkOfPoses2DInf > |
| using | GraphTester3DInf = GraphTester< CNetworkOfPoses3DInf > |
Functions | |
| MRPT_TODO ("Re-enable tests after https://github.com/MRPT/mrpt/issues/770") | |
Variables | |
| std::string | mrpt::MRPT_GLOBAL_UNITTEST_SRC_DIR |
| const std::map< std::string, in_out_filenames > | inout_graph_files |
Macro Definition Documentation
◆ GRAPHS_TESTS
| #define GRAPHS_TESTS | ( | _TYPE | ) |
Value:
TEST_F(_TYPE, OptimizeSampleRingPath) \
{ \
for (int seed = 1; seed <= 3; seed++) \
{ \
getRandomGenerator().randomize(seed); \
test_ring_path(#_TYPE); \
} \
} \
TEST_F(_TYPE, BinarySerialization) \
{ \
getRandomGenerator().randomize(123); \
test_graph_bin_serialization(); \
} \
TEST_F(_TYPE, WriteReadTextFile) \
{ \
getRandomGenerator().randomize(123); \
test_graph_text_serialization(); \
} \
TEST_F(_TYPE, OptimizeCompareKnownSolution) \
{ \
test_optimize_compare_known_solution(#_TYPE); \
}
Definition at line 222 of file graph_slam_levmarq_unittest.cpp.
Typedef Documentation
◆ GraphTester2D
| using GraphTester2D = GraphTester<CNetworkOfPoses2D> |
Definition at line 217 of file graph_slam_levmarq_unittest.cpp.
◆ GraphTester2DInf
Definition at line 219 of file graph_slam_levmarq_unittest.cpp.
◆ GraphTester3D
| using GraphTester3D = GraphTester<CNetworkOfPoses3D> |
Definition at line 218 of file graph_slam_levmarq_unittest.cpp.
◆ GraphTester3DInf
Definition at line 220 of file graph_slam_levmarq_unittest.cpp.
◆ in_out_filenames
| using in_out_filenames = std::set<std::tuple<std::string, std::string> > |
Definition at line 30 of file graph_slam_levmarq_unittest.cpp.
Function Documentation
◆ MRPT_TODO()
| MRPT_TODO | ( | "Re-enable tests after https://github.com/MRPT/mrpt/issues/770" | ) |
Variable Documentation
◆ inout_graph_files
| const std::map<std::string, in_out_filenames> inout_graph_files |
Initial value:
{
{"GraphTester2D",
{{"graphslam_SE2_in.graph", "graphslam_SE2_out_good.graph"},
{"graphslam_SE2_in2.graph", "graphslam_SE2_out_good2.graph"},
{"graphslam_SE2_in3.graph", "graphslam_SE2_out_good3.graph"}}},
{"GraphTester2DInf",
{{"graphslam_SE2_in.graph", "graphslam_SE2_out_good.graph"},
{"graphslam_SE2pdf_in.graph", "graphslam_SE2pdf_out_good.graph"}}}}
Definition at line 31 of file graph_slam_levmarq_unittest.cpp.
Referenced by GraphTester< my_graph_t >::test_optimize_compare_known_solution().