#include <mrpt/poses/CPose2D.h>#include <mrpt/poses/CPose3D.h>#include <mrpt/poses/CPoint3D.h>#include <mrpt/math/num_jacobian.h>#include <CTraitsTest.h>#include <gtest/gtest.h>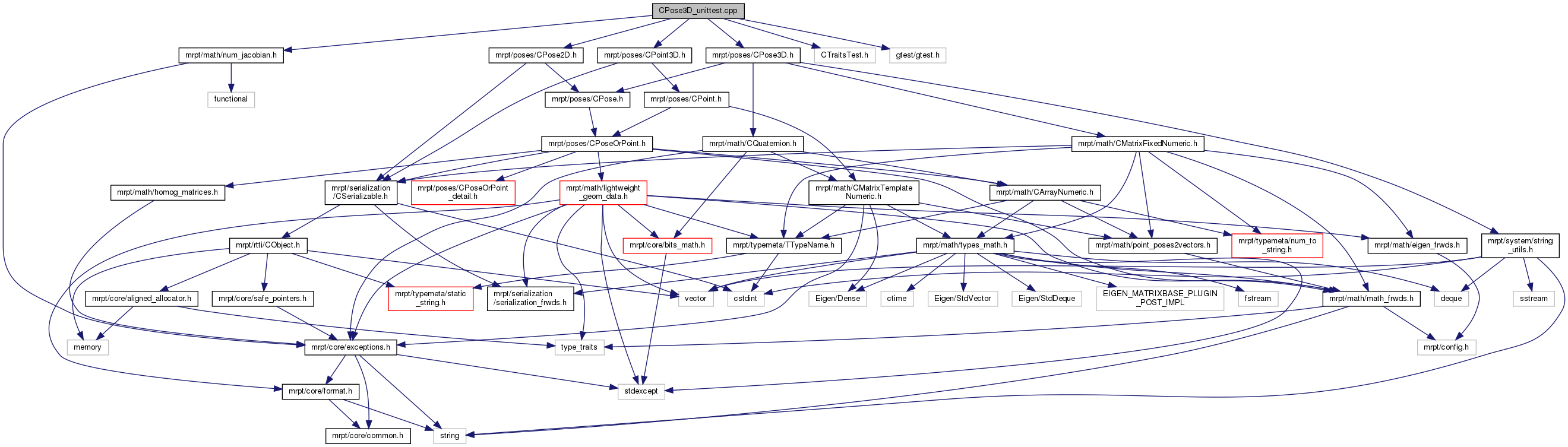
Go to the source code of this file.
Classes | |
| class | Pose3DTests |
| struct | Pose3DTests::TParams_func_jacob_Aexpe_D |
Functions | |
| TEST_F (Pose3DTests, DefaultValues) | |
| TEST_F (Pose3DTests, Initialization) | |
| TEST_F (Pose3DTests, OperatorBracket) | |
| TEST_F (Pose3DTests, InverseHM) | |
| TEST_F (Pose3DTests, Compose) | |
| TEST_F (Pose3DTests, composeFrom) | |
| TEST_F (Pose3DTests, ToFromCPose2D) | |
| TEST_F (Pose3DTests, ComposeAndInvComposeWithPoint) | |
| TEST_F (Pose3DTests, ComposePointJacob) | |
| TEST_F (Pose3DTests, ComposePointJacobApprox) | |
| TEST_F (Pose3DTests, InvComposePointJacob) | |
| TEST_F (Pose3DTests, ComposePointJacob_se3) | |
| TEST_F (Pose3DTests, InvComposePointJacob_se3) | |
| TEST_F (Pose3DTests, ExpLnEqual) | |
| TEST_F (Pose3DTests, Jacob_dExpe_de_at_0) | |
| TEST_F (Pose3DTests, Jacob_dLnT_dT) | |
| TEST_F (Pose3DTests, Jacob_dexpeD_de) | |
| TEST_F (Pose3DTests, Jacob_dAexpeD_de) | |
Variables | |
| const double | ptc [][6] |
| const size_t | num_ptc = sizeof(ptc) / sizeof(ptc[0]) |
Function Documentation
◆ TEST_F() [1/18]
| TEST_F | ( | Pose3DTests | , |
| DefaultValues | |||
| ) |
Definition at line 764 of file CPose3D_unittest.cpp.
◆ TEST_F() [2/18]
| TEST_F | ( | Pose3DTests | , |
| Initialization | |||
| ) |
Definition at line 788 of file CPose3D_unittest.cpp.
◆ TEST_F() [3/18]
| TEST_F | ( | Pose3DTests | , |
| OperatorBracket | |||
| ) |
Definition at line 799 of file CPose3D_unittest.cpp.
◆ TEST_F() [4/18]
| TEST_F | ( | Pose3DTests | , |
| InverseHM | |||
| ) |
Definition at line 832 of file CPose3D_unittest.cpp.
References mrpt::DEG2RAD(), num_ptc, and ptc.
◆ TEST_F() [5/18]
| TEST_F | ( | Pose3DTests | , |
| Compose | |||
| ) |
Definition at line 840 of file CPose3D_unittest.cpp.
References mrpt::DEG2RAD(), num_ptc, and ptc.
◆ TEST_F() [6/18]
| TEST_F | ( | Pose3DTests | , |
| composeFrom | |||
| ) |
Definition at line 850 of file CPose3D_unittest.cpp.
References mrpt::DEG2RAD(), num_ptc, and ptc.
◆ TEST_F() [7/18]
| TEST_F | ( | Pose3DTests | , |
| ToFromCPose2D | |||
| ) |
Definition at line 861 of file CPose3D_unittest.cpp.
References mrpt::DEG2RAD(), num_ptc, and ptc.
◆ TEST_F() [8/18]
| TEST_F | ( | Pose3DTests | , |
| ComposeAndInvComposeWithPoint | |||
| ) |
Definition at line 867 of file CPose3D_unittest.cpp.
References mrpt::DEG2RAD(), num_ptc, and ptc.
◆ TEST_F() [9/18]
| TEST_F | ( | Pose3DTests | , |
| ComposePointJacob | |||
| ) |
Definition at line 886 of file CPose3D_unittest.cpp.
References mrpt::DEG2RAD(), num_ptc, and ptc.
◆ TEST_F() [10/18]
| TEST_F | ( | Pose3DTests | , |
| ComposePointJacobApprox | |||
| ) |
Definition at line 899 of file CPose3D_unittest.cpp.
References mrpt::DEG2RAD().
◆ TEST_F() [11/18]
| TEST_F | ( | Pose3DTests | , |
| InvComposePointJacob | |||
| ) |
Definition at line 911 of file CPose3D_unittest.cpp.
References mrpt::DEG2RAD(), num_ptc, and ptc.
◆ TEST_F() [12/18]
| TEST_F | ( | Pose3DTests | , |
| ComposePointJacob_se3 | |||
| ) |
Definition at line 930 of file CPose3D_unittest.cpp.
References mrpt::DEG2RAD(), num_ptc, and ptc.
◆ TEST_F() [13/18]
| TEST_F | ( | Pose3DTests | , |
| InvComposePointJacob_se3 | |||
| ) |
Definition at line 951 of file CPose3D_unittest.cpp.
References mrpt::DEG2RAD(), num_ptc, and ptc.
◆ TEST_F() [14/18]
| TEST_F | ( | Pose3DTests | , |
| ExpLnEqual | |||
| ) |
Definition at line 973 of file CPose3D_unittest.cpp.
References mrpt::DEG2RAD(), num_ptc, and ptc.
◆ TEST_F() [15/18]
| TEST_F | ( | Pose3DTests | , |
| Jacob_dExpe_de_at_0 | |||
| ) |
Definition at line 981 of file CPose3D_unittest.cpp.
◆ TEST_F() [16/18]
| TEST_F | ( | Pose3DTests | , |
| Jacob_dLnT_dT | |||
| ) |
Definition at line 982 of file CPose3D_unittest.cpp.
References mrpt::DEG2RAD().
◆ TEST_F() [17/18]
| TEST_F | ( | Pose3DTests | , |
| Jacob_dexpeD_de | |||
| ) |
Definition at line 994 of file CPose3D_unittest.cpp.
References mrpt::DEG2RAD(), num_ptc, and ptc.
◆ TEST_F() [18/18]
| TEST_F | ( | Pose3DTests | , |
| Jacob_dAexpeD_de | |||
| ) |
Definition at line 1002 of file CPose3D_unittest.cpp.
References mrpt::DEG2RAD(), num_ptc, and ptc.
Variable Documentation
◆ num_ptc
Definition at line 829 of file CPose3D_unittest.cpp.
Referenced by TEST_F().
◆ ptc
| const double ptc[][6] |
Definition at line 812 of file CPose3D_unittest.cpp.
Referenced by TEST_F().