Detailed Description
Velodyne calibration data, for usage in mrpt::obs::CObservationVelodyneScan.
It is mandatory to use some calibration data to convert Velodyne scans into 3D point clouds. Users should normally use the XML files provided by the manufacturer with each scanner, but default calibration files can be loaded with VelodyneCalibration::LoadDefaultCalibration().
- Note
- New in MRPT 1.4.0
- See also
- CObservationVelodyneScan, CVelodyneScanner
Definition at line 32 of file VelodyneCalibration.h.
#include <mrpt/obs/VelodyneCalibration.h>
Classes | |
| struct | PerLaserCalib |
Public Member Functions | |
| VelodyneCalibration () | |
| Default ctor (leaves all empty) More... | |
| bool | empty () const |
| Returns true if no calibration has been loaded yet. More... | |
| void | clear () |
| Clear all previous contents. More... | |
| bool | loadFromXMLFile (const std::string &velodyne_calibration_xml_filename) |
| Loads calibration from file, in the format supplied by the manufacturer. More... | |
| bool | loadFromXMLText (const std::string &xml_file_contents) |
| Loads calibration from a string containing an entire XML calibration file. More... | |
Static Public Member Functions | |
| static const VelodyneCalibration & | LoadDefaultCalibration (const std::string &lidar_model) |
| Loads default calibration files for common LIDAR models. More... | |
Public Attributes | |
| std::vector< PerLaserCalib > | laser_corrections |
Private Member Functions | |
| bool | internal_loadFromXMLNode (void *node) |
Constructor & Destructor Documentation
◆ VelodyneCalibration()
| VelodyneCalibration::VelodyneCalibration | ( | ) |
Default ctor (leaves all empty)
Definition at line 41 of file VelodyneCalibration.cpp.
Member Function Documentation
◆ clear()
| void VelodyneCalibration::clear | ( | ) |
Clear all previous contents.
Definition at line 221 of file VelodyneCalibration.cpp.
References laser_corrections.
Referenced by internal_loadFromXMLNode().

◆ empty()
| bool VelodyneCalibration::empty | ( | ) | const |
Returns true if no calibration has been loaded yet.
Definition at line 220 of file VelodyneCalibration.cpp.
References laser_corrections.
Referenced by mrpt::hwdrivers::CVelodyneScanner::initialize().

◆ internal_loadFromXMLNode()
|
private |
Definition at line 42 of file VelodyneCalibration.cpp.
References ASSERT_ABOVEEQ_, mrpt::obs::VelodyneCalibration::PerLaserCalib::azimuthCorrection, clear(), mrpt::obs::VelodyneCalibration::PerLaserCalib::cosVertCorrection, mrpt::obs::VelodyneCalibration::PerLaserCalib::cosVertOffsetCorrection, mrpt::utils::DEG2RAD(), mrpt::obs::VelodyneCalibration::PerLaserCalib::distanceCorrection, XMLNode::getChildNode(), XMLNode::getText(), mrpt::obs::VelodyneCalibration::PerLaserCalib::horizontalOffsetCorrection, XMLNode::isEmpty(), laser_corrections, mrpt::obs::VelodyneCalibration::PerLaserCalib::sinVertCorrection, mrpt::obs::VelodyneCalibration::PerLaserCalib::sinVertOffsetCorrection, mrpt::obs::VelodyneCalibration::PerLaserCalib::verticalCorrection, and mrpt::obs::VelodyneCalibration::PerLaserCalib::verticalOffsetCorrection.
Referenced by loadFromXMLFile(), and loadFromXMLText().

◆ LoadDefaultCalibration()
|
static |
Loads default calibration files for common LIDAR models.
- Parameters
-
[in] lidar_model Valid model names are: VLP16,HDL32
- Returns
- It always return a calibration structure, but it may be empty if the model name is unknown. See empty()
- Note
- Default files can be inspected in
[MRPT_SRC or /usr]/share/mrpt/config_files/rawlog-grabber/velodyne_default_calib_{*}.xml
Definition at line 226 of file VelodyneCalibration.cpp.
References cache_default_calibs, loadFromXMLText(), velodyne_default_calib_HDL32, and velodyne_default_calib_VLP16.
◆ loadFromXMLFile()
| bool VelodyneCalibration::loadFromXMLFile | ( | const std::string & | velodyne_calibration_xml_filename | ) |
Loads calibration from file, in the format supplied by the manufacturer.
Loads calibration from file.
- Returns
- false on any error, true on success
Definition at line 193 of file VelodyneCalibration.cpp.
References XMLResults::error, eXMLErrorNone, XMLNode::getError(), internal_loadFromXMLNode(), XMLResults::nColumn, XMLResults::nLine, and XMLNode::parseFile().
Referenced by mrpt::hwdrivers::CVelodyneScanner::loadCalibrationFile().


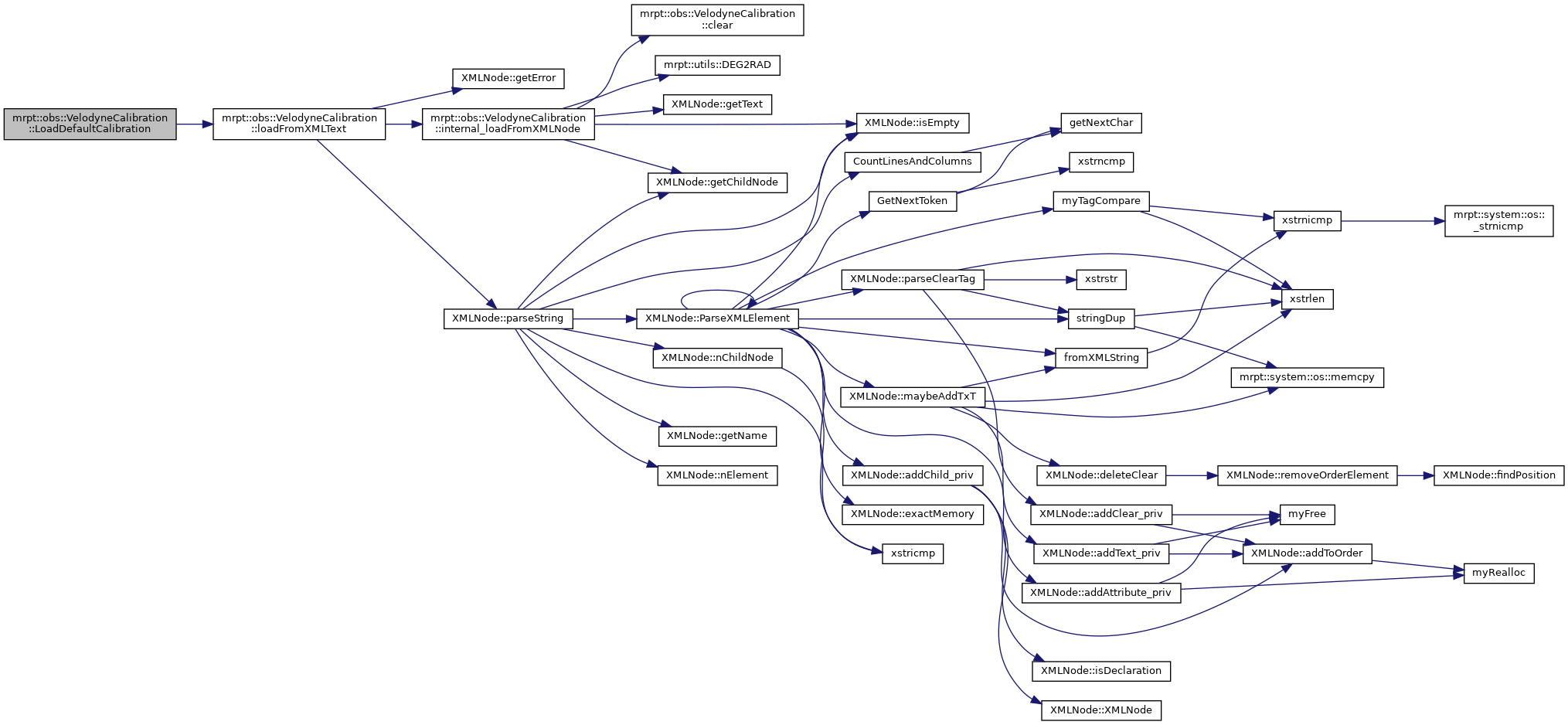
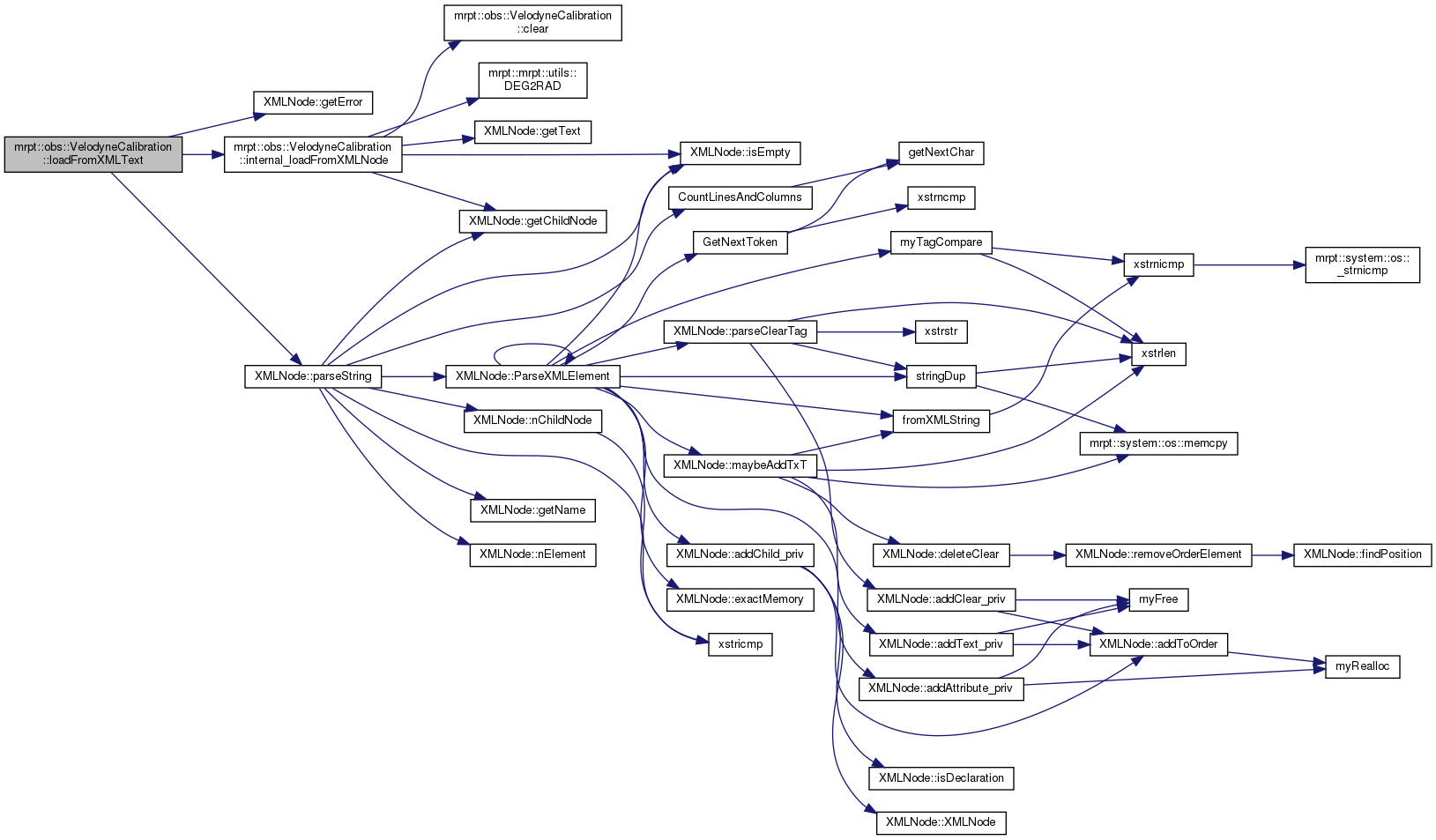
◆ loadFromXMLText()
| bool VelodyneCalibration::loadFromXMLText | ( | const std::string & | xml_file_contents | ) |
Loads calibration from a string containing an entire XML calibration file.
- See also
- loadFromXMLFile
- Returns
- false on any error, true on success
Definition at line 163 of file VelodyneCalibration.cpp.
References XMLResults::error, eXMLErrorNone, XMLNode::getError(), internal_loadFromXMLNode(), XMLResults::nColumn, XMLResults::nLine, and XMLNode::parseString().
Referenced by LoadDefaultCalibration().

Member Data Documentation
◆ laser_corrections
| std::vector<PerLaserCalib> mrpt::obs::VelodyneCalibration::laser_corrections |
Definition at line 72 of file VelodyneCalibration.h.
Referenced by clear(), empty(), internal_loadFromXMLNode(), mrpt::obs::CObservationVelodyneScan::readFromStream(), velodyne_scan_to_pointcloud(), and mrpt::obs::CObservationVelodyneScan::writeToStream().